A Point Pattern Chamfer Registration of Optical and SAR Images Based on Mesh Grids



Abstract
:1. Introduction
1.1. Background
1.2. Problems and Motivations
1.3. Contribution and Structure
- (1)
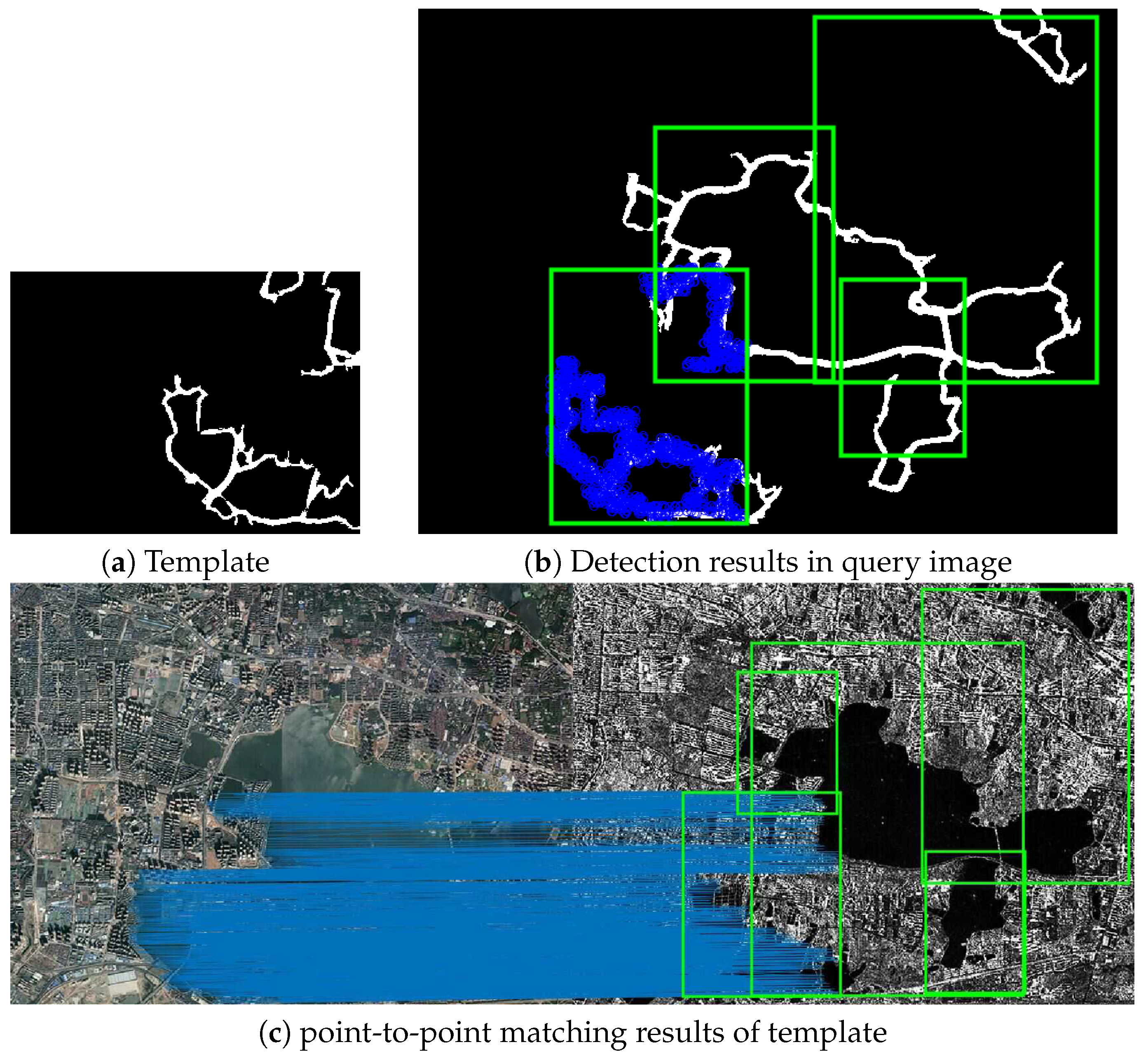
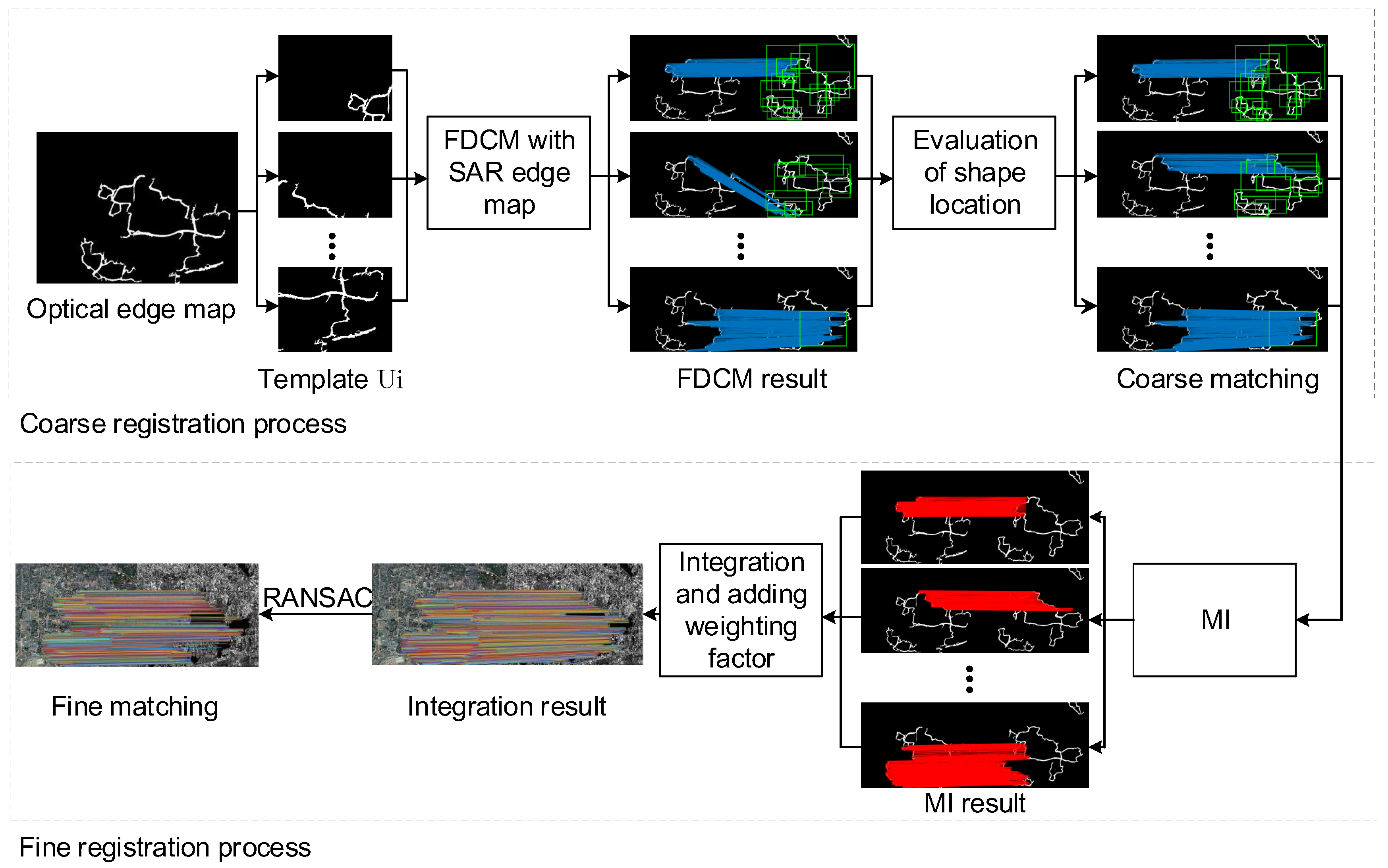
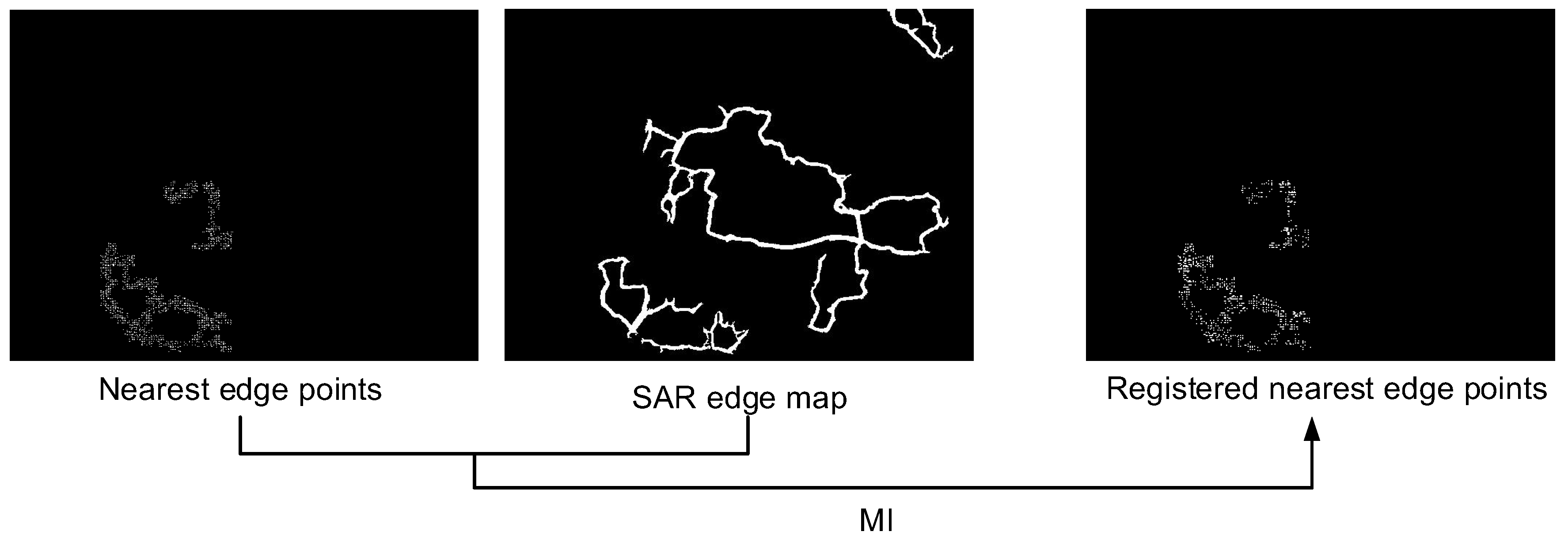
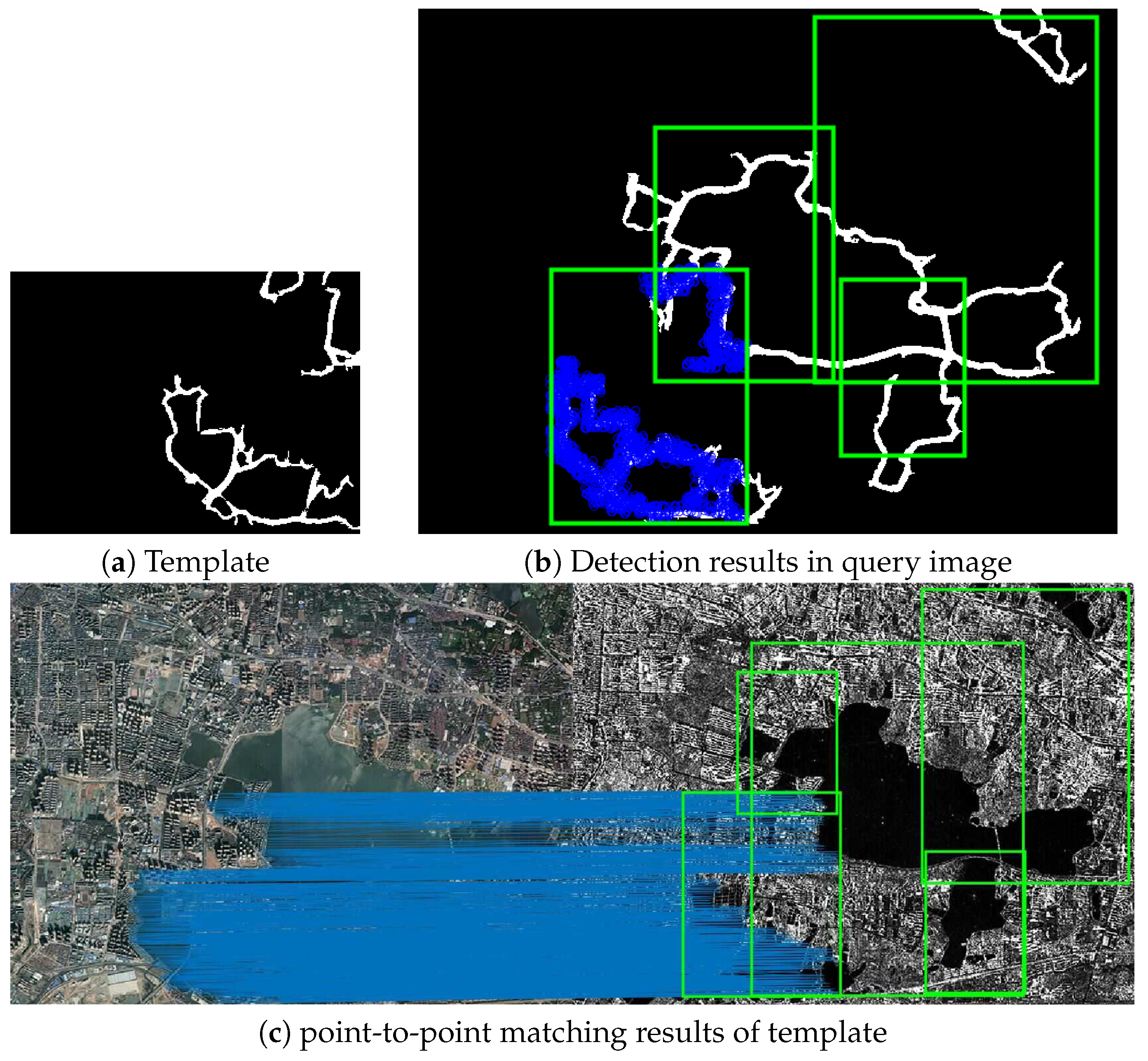
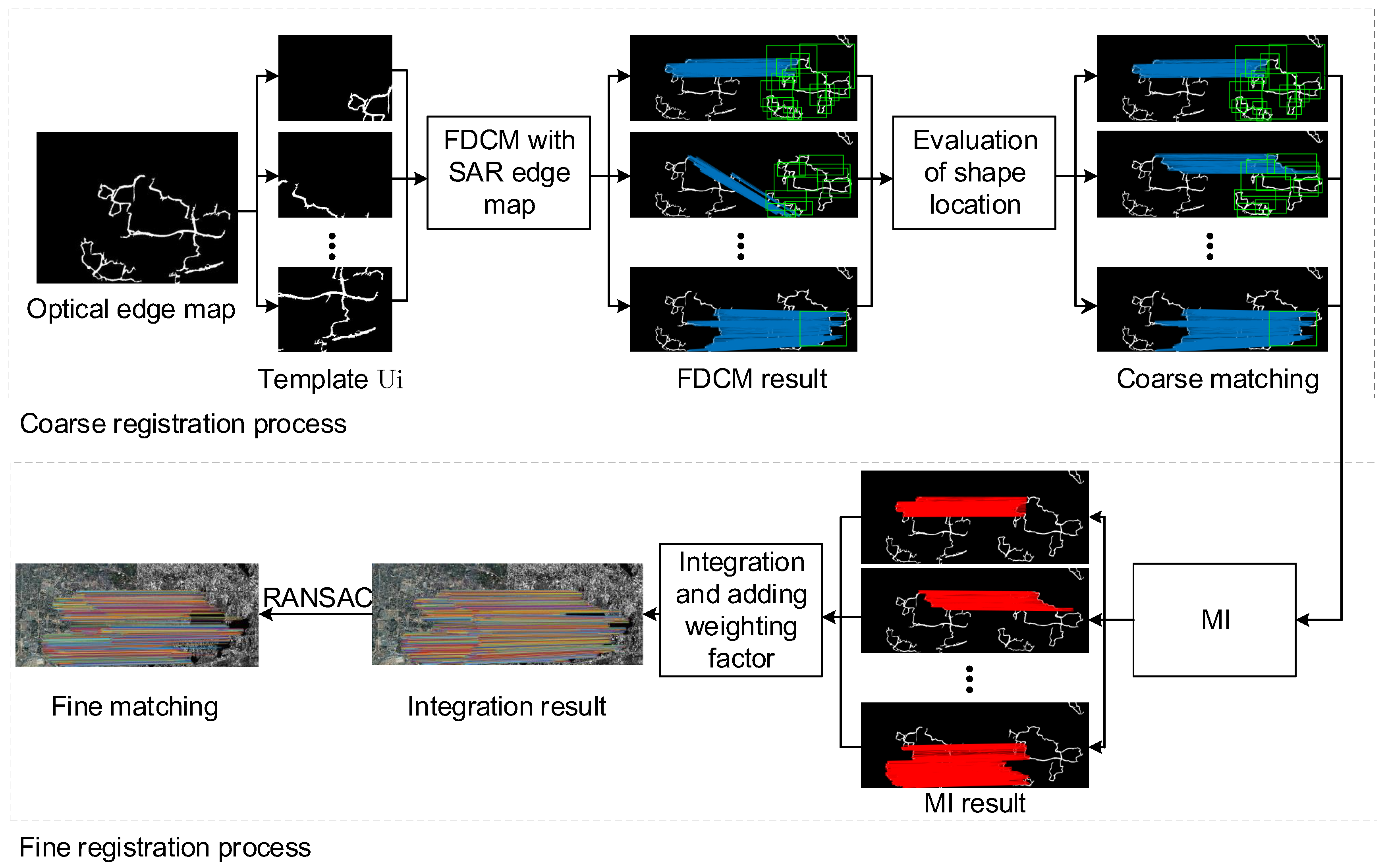
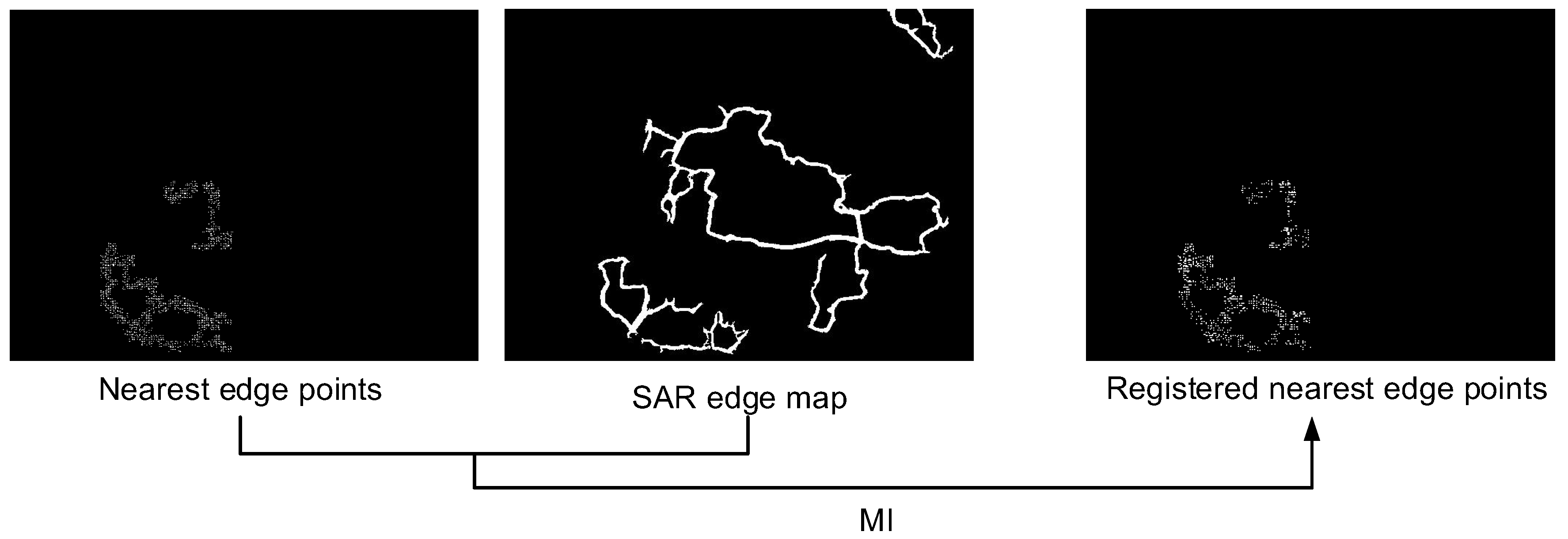
- For optical-to-SAR image registration, a new registration framework is proposed, that we call the point pattern chamfer registration based on mesh grids (PPCM). The mesh grid strategy [47] is introduced to perform a coarse-to-fine registration. In the process of the coarse registration, PPCM provides the template so that FDCM can be used and shape detection can be applied to the points matching. Then, PPCM can resolve the false matching caused by FDCM. In the process of the fine registration, PPCM applies MI in different grids to fine-tune the coarse matching results, and then, PPCM integrates the whole matching results, which can solve the deformation problem to a certain extent.
- (2)
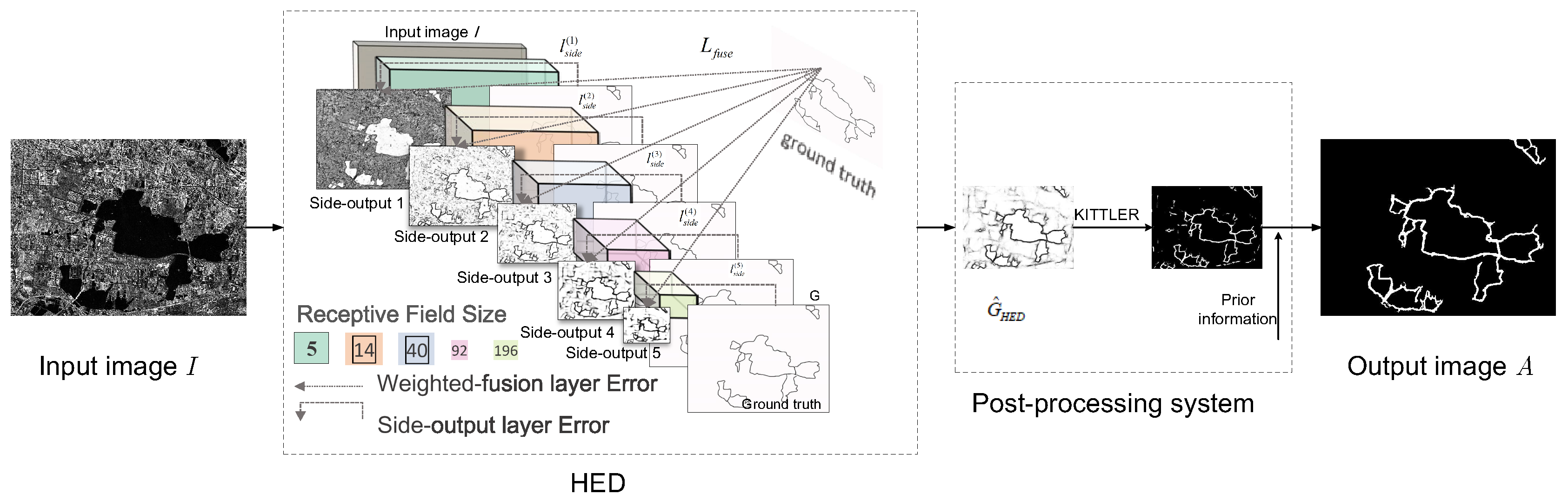
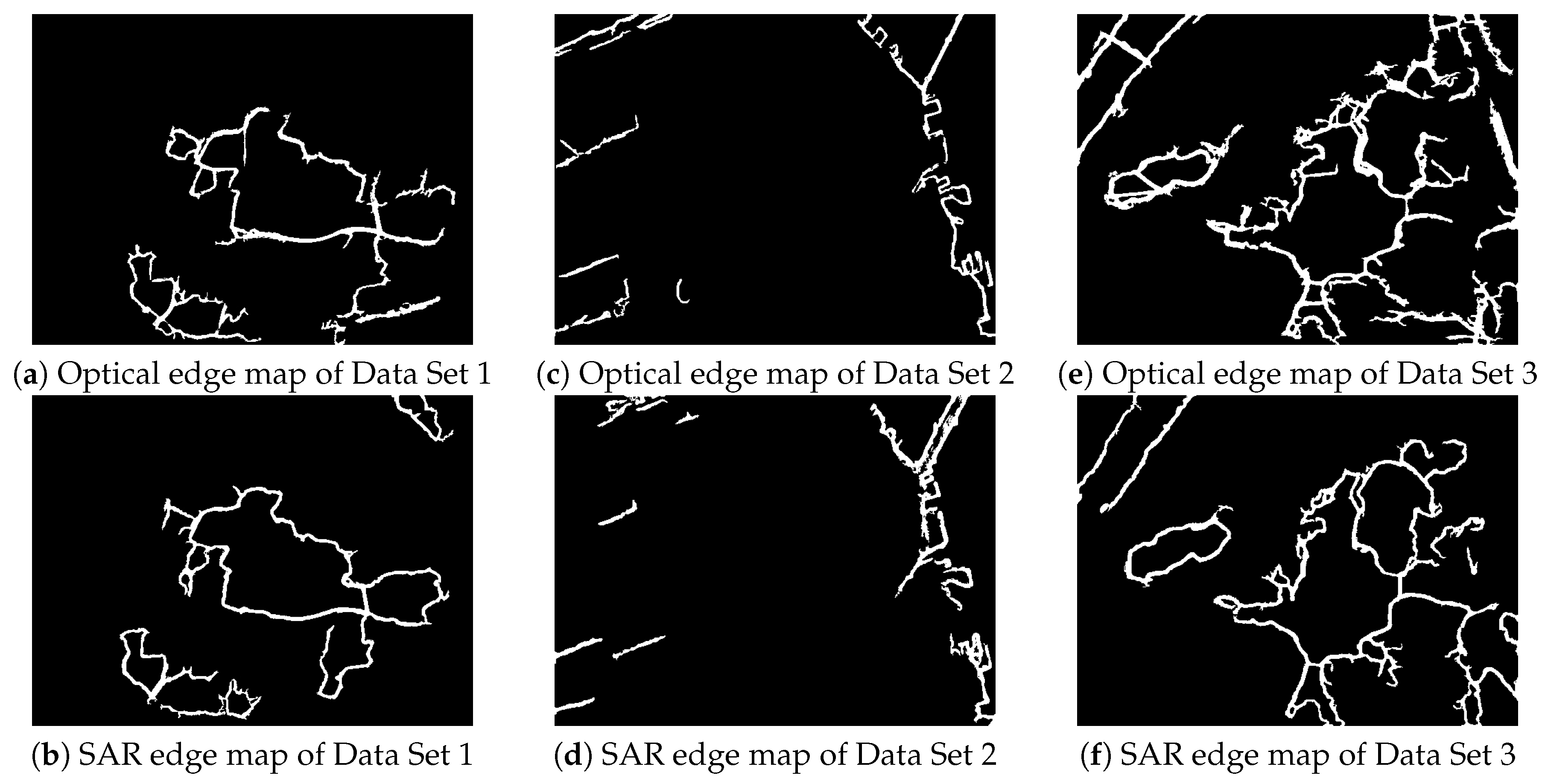
- For traditional edge extraction algorithms that are sensitive to noise, a modified HED is applied in the framework. This algorithm uses a deep learning model, completes predictions from image to image by learning rich multi-scale features and achieves more accurate contour extraction. Then, the edge map will contain the main contours.
- (3)
- For the extracted edge map, FDCM is introduced. By using line segments to represent the contour and endpoints to represent the line segments, the preliminary matching points are obtained. After acquiring the fine matching points, a moving DLT is introduced to align the images and alleviate the problem of parallax.
2. Methodology
2.1. Modified HED
2.2. FDCM
2.3. Mesh Grid Strategy
2.4. Moving DLT
3. Framework of the Point Pattern Chamfer Registration Based on Mesh Grids
4. Experiment
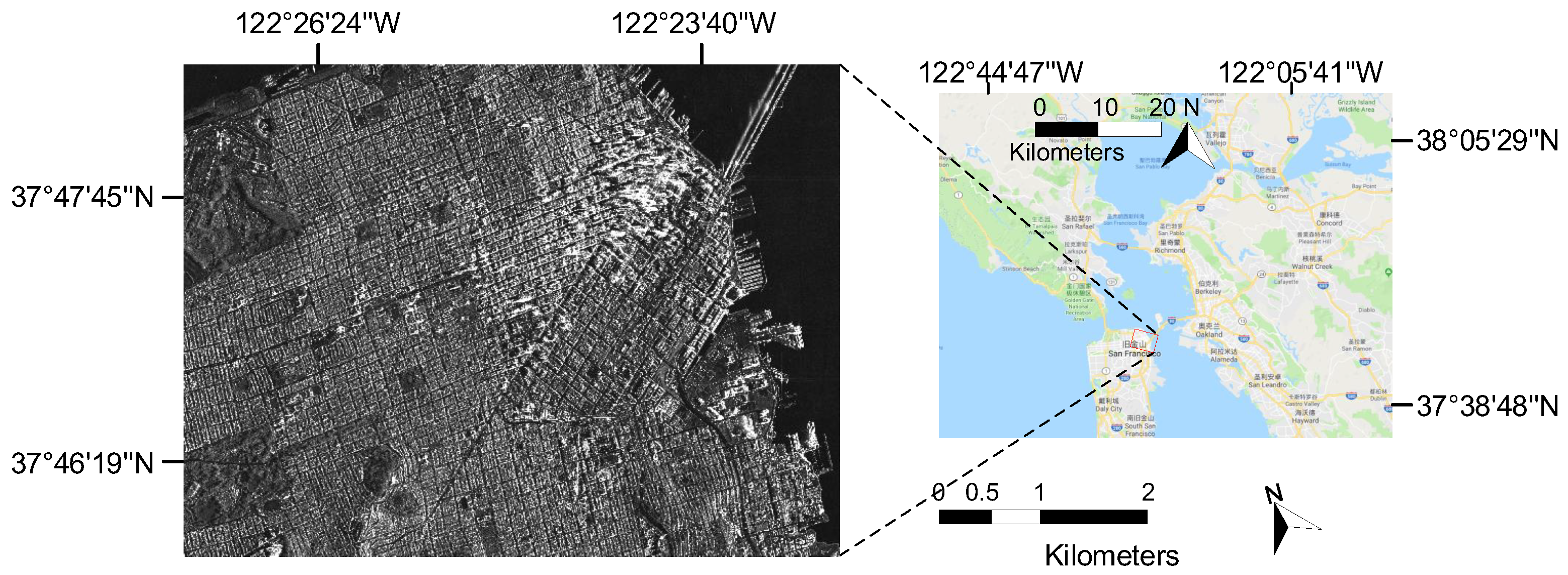
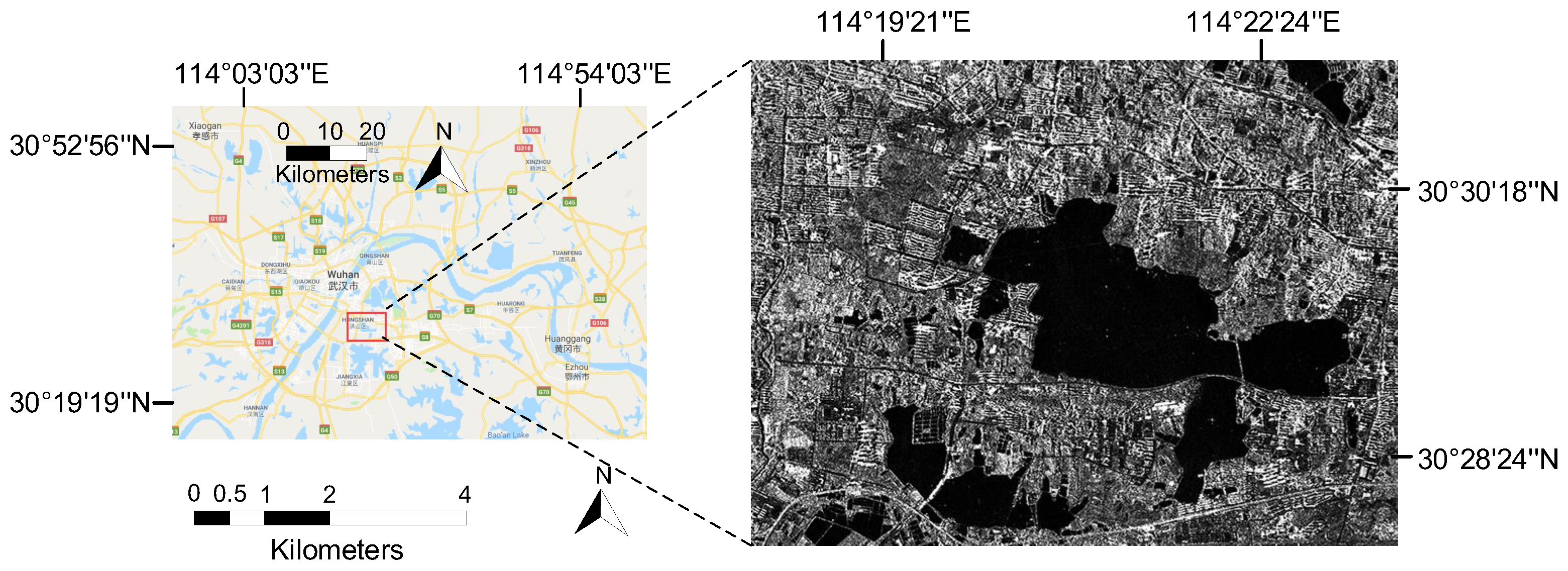
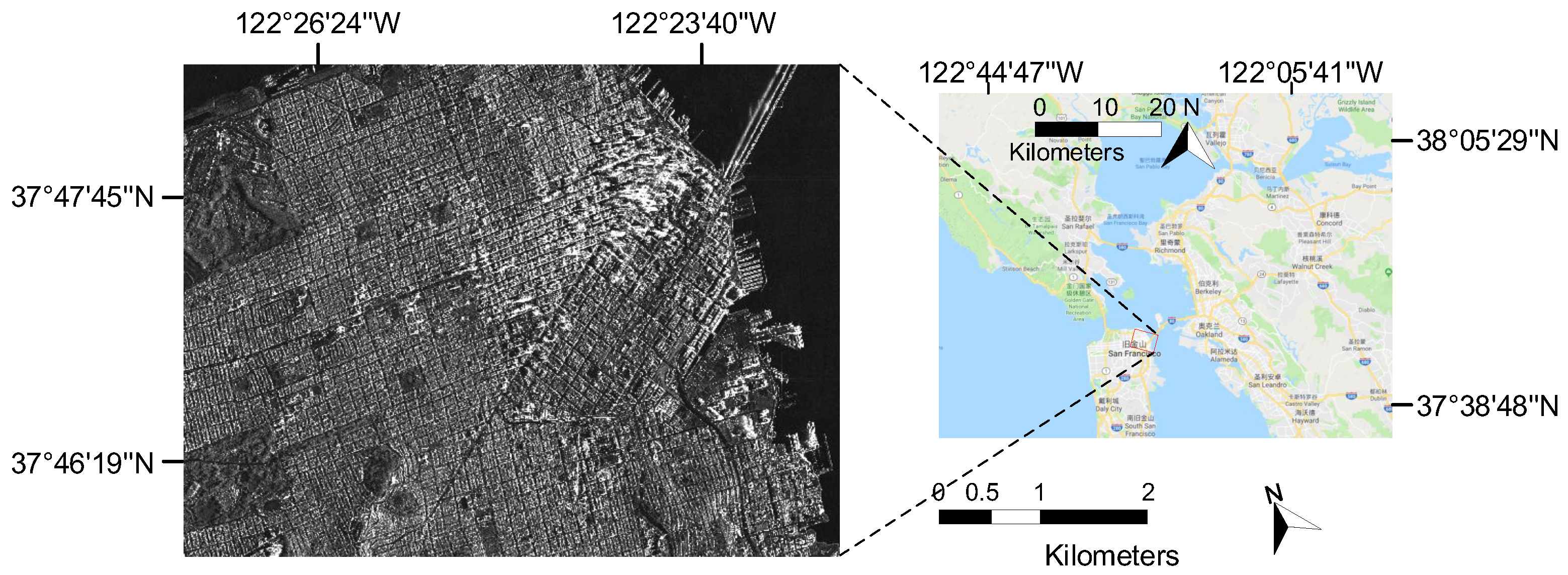
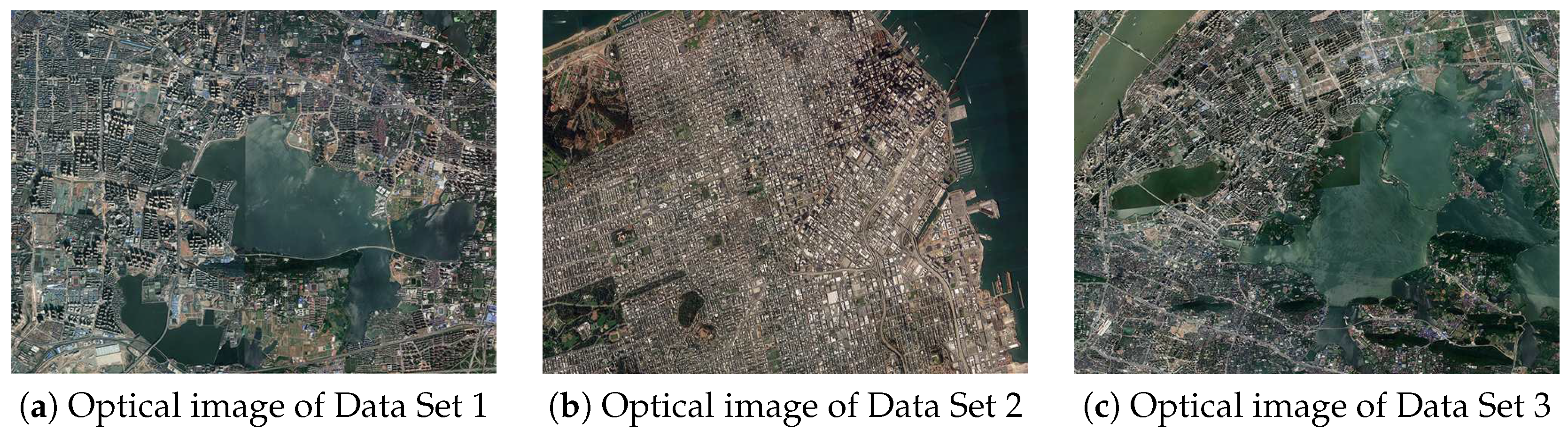
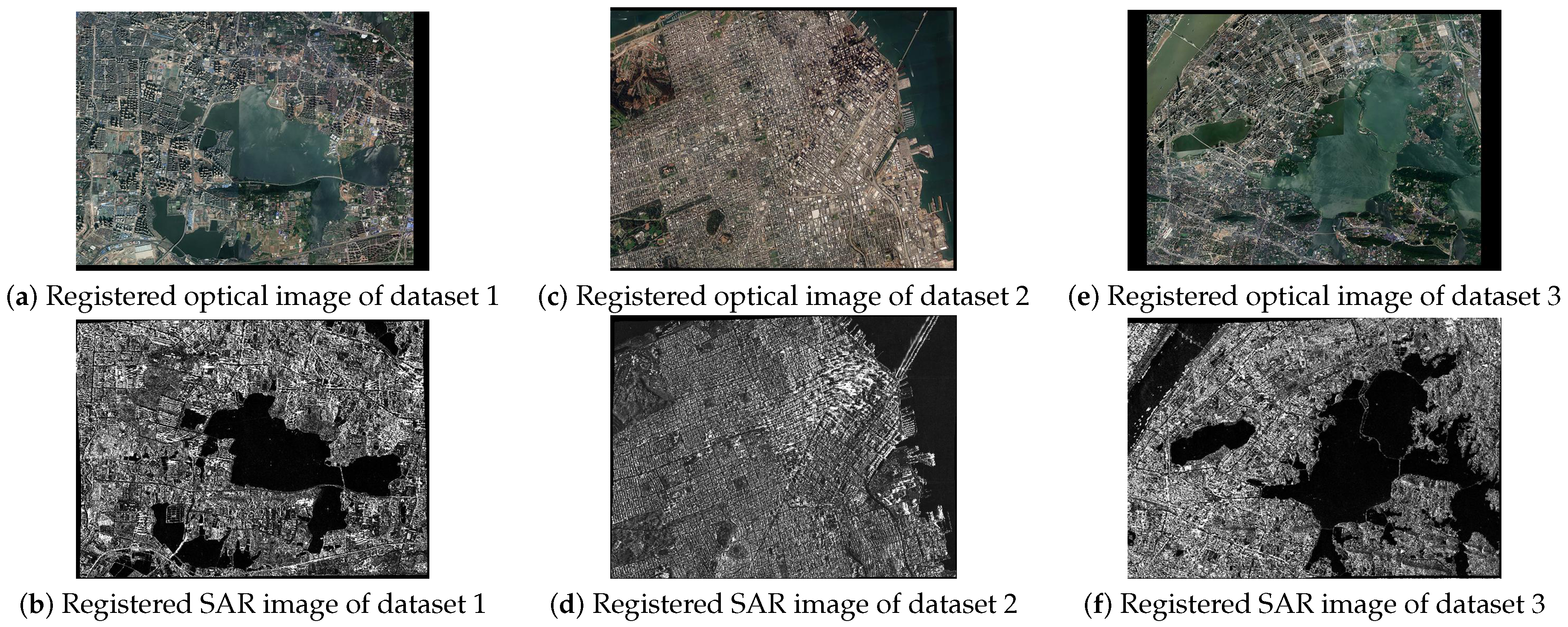
4.1. Experiment Data
4.2. Experiment Result
4.2.1. Correct Matching Ratio Comparison
4.2.2. Registration Performance Comparison
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Brown, L.G. A survey of image registration techniques. ACM Comput. Surv. 1992, 24, 325–376. [Google Scholar] [CrossRef] [Green Version]
- Liesenberg, V.; de Souza Filho, C.R.; Gloaguen, R. Evaluating moisture and geometry effects on L-band SAR classification performance over a tropical rain forest environment. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5357–5368. [Google Scholar] [CrossRef]
- Errico, A.; Angelino, C.V.; Cicala, L.; Persechino, G.; Ferrara, C.; Lega, M.; Vallario, A.; Parente, C.; Masi, G.; Gaetano, R. Detection of environmental hazards through the feature-based fusion of optical and SAR data: A case study in southern Italy. Int. J. Remote Sens. 2015, 36, 3345–3367. [Google Scholar] [CrossRef]
- Zhang, G.; Sui, H.; Song, Z.; Hua, F.; Hua, L. Automatic Registration Method of SAR and Optical Image Based on Line Features and Spectral Graph Theory. In Proceedings of the International Conference on Multimedia and Image Processing, Wuhan, China, 17–19 March 2017; pp. 64–67. [Google Scholar]
- Yang, L.J.; Tian, Z.; Zhao, W. A new affine invariant feature extraction method for SAR image registration. Int. J. Remote Sens. 2014, 35, 7219–7229. [Google Scholar] [CrossRef]
- Suri, S.; Reinartz, P. Mutual-Information-Based Registration of TerraSAR-X and Ikonos Imagery in Urban Areas. IEEE Trans. Geosci. Remote Sens. 2010, 48, 939–949. [Google Scholar] [CrossRef]
- Hasan, M.; Pickering, M.R.; Jia, X. Multi-modal registration of SAR and optical satellite images. In Proceedings of the Digital Image Computing: Techniques and Applications, Melbourne, VIC, Australia, 1–3 December 2009; pp. 447–453. [Google Scholar]
- Merkle, N.; Müller, R.; Schwind, P.; Palubinskas, G.; Reinartz, P. A new approach for optical and sar satellite image registration. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 2, 119. [Google Scholar] [CrossRef]
- Li, W.; Leung, H. A maximum likelihood approach for image registration using control point and intensity. IEEE Trans. Image Process. 2004, 13, 1115–1127. [Google Scholar] [CrossRef] [PubMed]
- Cheah, T.C.; Shanmugam, S.A.; Mann, K.A.L. Medical image registration by maximizing mutual information based on combination of intensity and gradient information. In Proceedings of the 2012 International Conference on Biomedical Engineering (ICoBE), Penang, Malaysia, 27–28 February 2012; pp. 368–372. [Google Scholar]
- Cole-Rhodes, A.A.; Johnson, K.L.; LeMoigne, J.; Zavorin, I. Multiresolution registration of remote sensing imagery by optimization of mutual information using a stochastic gradient. IEEE Trans. Image Process. 2003, 12, 1495–1511. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Z.; Leung, H. Contour-based multisensor image registration with rigid transformation. In Proceedings of the 2007 10th International Conference on Information Fusion, Quebec, QC, Canada, 9–12 July 2007; pp. 1–7. [Google Scholar]
- Arora, M.K. Mutual information-based image registration for remote sensing data. Int. J. Remote Sens. 2003, 24, 3701–3706. [Google Scholar] [Green Version]
- Saidi, F.; Chen, J.; Wang, P. A refined automatic co-registration method for high-resolution optical and sar images by maximizing mutual information. In Proceedings of the IEEE International Conference on Signal and Image Processing, Beijing, China, 13–15 August 2017; pp. 231–235. [Google Scholar]
- Gong, M.; Zhao, S.; Jiao, L.; Tian, D.; Wang, S. A novel coarse-to-fine scheme for automatic image registration based on SIFT and mutual information. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4328–4338. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef] [Green Version]
- Fan, B.; Huo, C.; Pan, C.; Kong, Q. Registration of optical and SAR satellite images by exploring the spatial relationship of the improved SIFT. IEEE Geosci. Remote Sens. Lett. 2013, 10, 657–661. [Google Scholar] [CrossRef]
- Dellinger, F.; Delon, J.; Gousseau, Y.; Michel, J.; Tupin, F. SAR-SIFT: A SIFT-Like Algorithm for SAR Images. IEEE Trans. Geosci. Remote Sens. 2013, 53, 453–466. [Google Scholar] [CrossRef] [Green Version]
- Schwind, P.; Suri, S.; Reinartz, P.; Siebert, A. Applicability of the SIFT operator to geometric SAR image registration. Int. J. Remote Sens. 2010, 31, 1959–1980. [Google Scholar] [CrossRef]
- Wang, S.; You, H.; Fu, K. BFSIFT: A Novel Method to Find Feature Matches for SAR Image Registration. IEEE Geosci. Remote Sens. Lett. 2012, 9, 649–653. [Google Scholar] [CrossRef]
- Wang, F.; You, H.; Fu, X. Adapted Anisotropic Gaussian SIFT Matching Strategy for SAR Registration. IEEE Geosci. Remote Sens. Lett. 2015, 12, 160–164. [Google Scholar] [CrossRef]
- Fan, J.; Wu, Y.; Wang, F.; Zhang, Q.; Liao, G.; Li, M. SAR Image Registration Using Phase Congruency and Nonlinear Diffusion-Based SIFT. IEEE Geosci. Remote Sens. Lett. 2014, 12, 562–566. [Google Scholar]
- Wang, B.; Zhang, J.; Lu, L.; Huang, G.; Zhao, Z. A Uniform SIFT-Like Algorithm for SAR Image Registration. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1426–1430. [Google Scholar] [CrossRef]
- Xiang, Y.; Wang, F.; Wan, L.; You, H. An Advanced Rotation Invariant Descriptor for SAR Image Registration. Remote Sens. 2017, 9, 686. [Google Scholar] [CrossRef]
- Huang, L.; Li, Z. Feature-based image registration using the shape context. Int. J. Remote Sens. 2010, 31, 2169–2177. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Manjunath, B.S.; Mitra, S.K. A Contour-Based Approach to Multisensor Image Registration; IEEE Press: Piscataway, NJ, USA, 1995; p. 320. [Google Scholar]
- Pan, C.; Zhang, Z.; Yan, H.; Wu, G.; Ma, S. Multisource data registration based on NURBS description of contours. Int. J. Remote Sens. 2008, 29, 569–591. [Google Scholar] [CrossRef]
- Dare, P.; Dowman, I. An improved model for automatic feature-based registration of SAR and SPOT images. ISPRS J. Photogramm. Remote Sens. 2001, 56, 13–28. [Google Scholar] [CrossRef]
- Canny, J. A Computational Approach to Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, PAMI-8, 679–698. [Google Scholar] [CrossRef]
- Gioi, R.G.V.; Jakubowicz, J.; Morel, J.M.; Randall, G. LSD: A line segment detector. Image Process. Line 2012, 2, 35–55. [Google Scholar] [CrossRef]
- Fjortoft, R.; Lopes, A.; Marthon, P.; Cuberocastan, E. An optimal multiedge detector for SAR image segmentation. IEEE Trans. Geosci. Remote Sens. 1998, 36, 793–802. [Google Scholar] [CrossRef] [Green Version]
- Xiang, D.; Ban, Y.; Wang, W.; Tang, T.; Su, Y. Edge Detector for Polarimetric SAR Images Using SIRV Model and Gauss-Shaped Filter. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1661–1665. [Google Scholar] [CrossRef]
- Liu, J.; Scott, K.A.; Gawish, A.; Fieguth, P. Automatic Detection of the Ice Edge in SAR Imagery Using Curvelet Transform and Active Contour. Remote Sens. 2016, 8, 480. [Google Scholar] [CrossRef]
- Xie, S.; Tu, Z. Holistically-Nested Edge Detection. Int. J. Comput. Vis. 2015, 125, 3–18. [Google Scholar] [CrossRef]
- Liang, J.; Liu, X.; Huang, K.; Li, X.; Wang, D.; Wang, X. Automatic Registration of Multisensor Images Using an Integrated Spatial and Mutual Information (SMI) Metric. IEEE Trans. Geosci. Remote Sens. 2013, 52, 603–615. [Google Scholar] [CrossRef]
- Liu, F.; Bi, F.; Chen, L.; Shi, H.; Liu, W. Feature-Area Optimization: A Novel SAR Image Registration Method. IEEE Geosci. Remote Sens. Lett. 2016, 13, 242–246. [Google Scholar] [CrossRef] [Green Version]
- Xiang, Y.; Wang, F.; You, H. An Automatic and Novel SAR Image Registration Algorithm: A Case Study of the Chinese GF-3 Satellite. Sensors 2018, 18, 672. [Google Scholar] [CrossRef] [PubMed]
- Xiong, B.; Li, W.; Zhao, L.; Lu, J.; Zhang, X.; Kuang, G. Registration for SAR and optical images based on straight line features and mutual information. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium, Beijing, China, 10–15 July 2016; pp. 2582–2585. [Google Scholar]
- Chen, T.; Chen, L. A Union Matching Method for SAR Images Based on SIFT and Edge Strength. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 1939, 7, 4897–4906. [Google Scholar] [CrossRef]
- Zhu, H.; Ma, W.; Hou, B.; Jiao, L. SAR Image Registration Based on Multifeature Detection and Arborescence Network Matching. IEEE Geosci. Remote Sens. Lett. 2016, 13, 706–710. [Google Scholar] [CrossRef]
- Sui, H.; Xu, C.; Liu, J.; Hua, F. Automatic Optical-to-SAR Image Registration by Iterative Line Extraction and Voronoi Integrated Spectral Point Matching. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6058–6072. [Google Scholar] [CrossRef]
- Ma, W.; Wen, Z.; Wu, Y.; Jiao, L.; Gong, M.; Zheng, Y.; Liu, L. Remote Sensing Image Registration with Modified SIFT and Enhanced Feature Matching. IEEE Geosci. Remote Sens. Lett. 2016, 14, 3–7. [Google Scholar] [CrossRef]
- Rui, J.; Wang, C.; Zhang, H.; Jin, F. Multi-Sensor SAR Image Registration Based on Object Shape. Remote Sens. 2016, 8, 923. [Google Scholar] [CrossRef]
- Eugenio, F.; Marques, F. Automatic satellite image georeferencing using a contour-matching approach. IEEE Trans. Geosci. Remote Sens. 2008, 41, 2869–2880. [Google Scholar] [CrossRef]
- Liu, M.Y.; Tuzel, O.; Veeraraghavan, A.; Chellappa, R. Fast directional chamfer matching. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 1696–1703. [Google Scholar]
- Zaragoza, J.; Chin, T.J.; Tran, Q.H.; Brown, M.S.; Suter, D. As-Projective-As-Possible Image Stitching with Moving DLT. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 2339–2346. [Google Scholar]
- Lin, W.Y.; Liu, S.; Matsushita, Y.; Ng, T.T. Smoothly varying affine stitching. In Proceedings of the Computer Vision and Pattern Recognition, Colorado Springs, CO, USA, 20–25 June 2011; pp. 345–352. [Google Scholar]
- Kittler, J.; Illingworth, J. Minimum error thresholding. Pattern Recognit. 1986, 19, 41–47. [Google Scholar] [CrossRef]
- Buiten, H.; Van Putten, B. Quality assessment of remote sensing image registration-analysis and testing of control point residuals. ISPRS J. Photogramm. Remote Sens. 1997, 52, 57–73. [Google Scholar] [CrossRef]
- Bansal, M.; Daniilidis, K. Joint Spectral Correspondence for Disparate Image Matching. In Proceedings of the Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 2802–2809. [Google Scholar]
- Huo, C.; Pan, C.; Huo, L.; Zhou, Z. Multilevel SIFT matching for large-size VHR image registration. IEEE Geosci. Remote Sens. Lett. 2012, 9, 171–175. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Set | Sensor | Resolutions | Position | Date | Size |
|---|---|---|---|---|---|
| Data Set 1 | TerraSAR-X (VV polarization) | 1.75 m | Wuhan | 28 September 2008 | 3040 × 2481 |
| Google Earth | 17 m | Wuhan | 5 May 2017 | 998 × 819 | |
| Data Set 2 | TerraSAR-X (HH polarization) | 0.455 m × 0.872 m | San Francisco | 2 October 2011 | 782 × 510 |
| Google Earth | 8 m | San Francisco | 11 May 2018 | 2126 × 1388 | |
| Data Set 3 | TerraSAR-X (VV polarization) | 1.75 m | Wuhan | 28 September 2008 | 1020 × 772 |
| Google Earth | 8 m | Wuhan | 9 December 2017 | 3048 × 2252 |
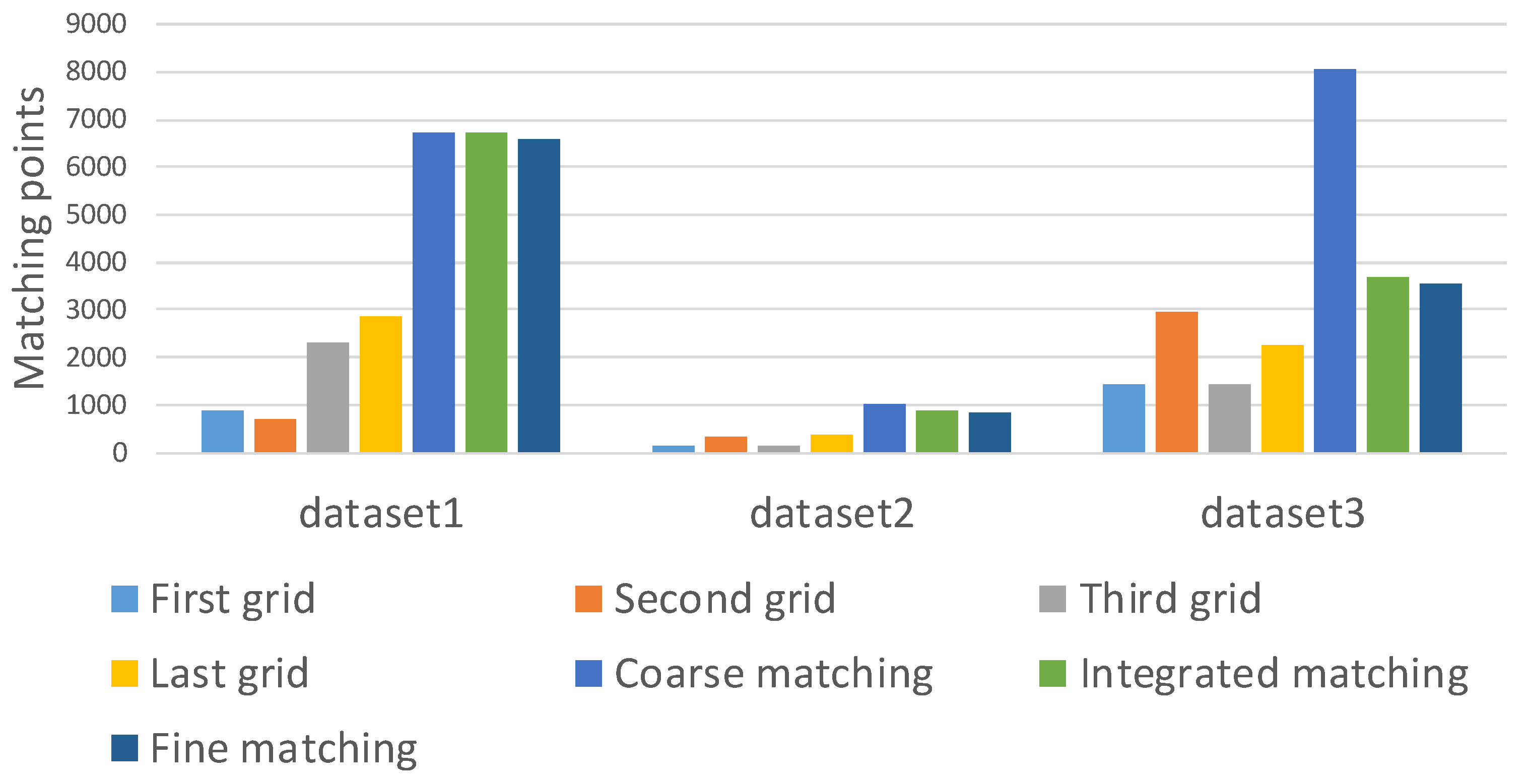
| Matching Points | First Grid | Second Grid | Third Grid | Last Grid | Coarse Matching | Integrated Matching | Fine Matching |
|---|---|---|---|---|---|---|---|
| Data Set 1 | 896 | 680 | 2284 | 2852 | 6712 | 6712 | 6574 |
| Data Set 2 | 156 | 346 | 148 | 370 | 1020 | 864 | 851 |
| Data Set 3 | 1442 | 2934 | 1454 | 2254 | 8084 | 3708 | 3545 |
| Dataset | Matching Results | PSO-SIFT | JSCM | Proposed Method (PPCM) |
|---|---|---|---|---|
| Data Set 1 | Initial matches | 40 | 11 | 6712 |
| Correct matches | 0 | 5 | 6574 | |
| matching ratio | 0 | 0.4545 | 0.9794 | |
| Data Set 2 | Initial matches | 18 | 9 | 864 |
| Correct matches | 0 | 5 | 851 | |
| matching ratio | 0 | 0.5556 | 0.9850 | |
| Data Set 3 | Initial matches | 39 | 16 | 3708 |
| Correct matches | 0 | 10 | 3545 | |
| matching ratio | 0 | 0.6250 | 0.9560 |
| Data Set | MI | PSO-SIFT | RACM | Matching Result + Global Warping | Proposed Method | ||
|---|---|---|---|---|---|---|---|
| Data Set 1 | RMSE | 5 | 8.3427 | / | 16.2911 | 4.7958 | 4.7117 |
| 30 | 10.0283 | / | 20.8854 | 7.1157 | 5.1704 | ||
| time (s) | 101.4491 | / | 86.6159 | 72.8378 | 113.6955 | ||
| Data Set 2 | RMSE | 5 | 77.0766 | / | 8.1564 | 8.2183 | 8.4971 |
| 30 | 80.9856 | / | 10.3005 | 9.4498 | 9.1378 | ||
| time (s) | 34.0148 | / | 75.335 | 28.6711 | 39.5018 | ||
| Data Set 3 | RMSE | 5 | 23.3152 | / | 27.4299 | 17.3090 | 13.5527 |
| 30 | 22.4061 | / | 21.7394 | 16.4874 | 12.0153 | ||
| time (s) | 170.7673 | / | 376.4573 | 57.7867 | 82.5684 | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, C.; Fang, P.; Xiong, D.; Wang, W.; Liao, M. A Point Pattern Chamfer Registration of Optical and SAR Images Based on Mesh Grids. Remote Sens. 2018, 10, 1837. https://doi.org/10.3390/rs10111837
He C, Fang P, Xiong D, Wang W, Liao M. A Point Pattern Chamfer Registration of Optical and SAR Images Based on Mesh Grids. Remote Sensing. 2018; 10(11):1837. https://doi.org/10.3390/rs10111837
Chicago/Turabian StyleHe, Chu, Peizhang Fang, Dehui Xiong, Wenwei Wang, and Mingsheng Liao. 2018. "A Point Pattern Chamfer Registration of Optical and SAR Images Based on Mesh Grids" Remote Sensing 10, no. 11: 1837. https://doi.org/10.3390/rs10111837
APA StyleHe, C., Fang, P., Xiong, D., Wang, W., & Liao, M. (2018). A Point Pattern Chamfer Registration of Optical and SAR Images Based on Mesh Grids. Remote Sensing, 10(11), 1837. https://doi.org/10.3390/rs10111837