Infrared Small Target Detection via Modified Random Walks


Abstract
:1. Introduction
- A multi-dimensional image is constructed, and each element of the image delineates the local contrast of the corresponding pixel in the original infrared image. Additionally, the local contrast element is utilized as an indicator of the seeds selection for the random walks algorithm.
- A confidence map for the original image is achieved using the MRW algorithm. The targets of interest are well enhanced, while the background clutter and noise are greatly suppressed.
- A dim-small target detection algorithm is designed based on MRW. To demonstrate the validity of the algorithm, a real dataset is used in our experiments. The extensive experimental results show that the proposed method is superior to the state-of-the-art methods with respect to target enhancement performance and detection accuracy.
2. Methodology
2.1. Overview of Random Walks
2.2. Adaptive Seeds Selection Based on Seeds Selection Map (SSM)
2.2.1. Seeds Selection Map (SSM)
2.2.2. Adaptive Seeds Selection for Random Walks
- The goals of these two methods are different. Random walk searches the optimal path from one state to another state, that is, leads one state to another state with highest probability. In the proposed algorithm, the random walks model finds the optimal paths from unlabeled pixels to the labeled pixels and obtains the probabilities of walking unlabeled pixels to labeled pixels. On the other hand, k-means aims to group scattered samples to several clutters with respect to the similarity of samples.
- The random walk process is a kind of Markov process, that is, every state of the model is only allowed to be transited to its adjacent states. For example, if state i and state j are not adjacent, the transition probability of moving from state i to state j is 0. Therefore, the weight of pixels and are set to 0 if they are not adjacent. However, the process of k-means clustering has no such limitation.
- The geographical information of states (pixels in the image) is involved in the random walks algorithm. The father the distance between two states i and j, the longer is the optimal path, thus the smaller is the probability of leading state i to state j. On the other hand, k-means does not consider the geographical information of the pixels.
2.3. Modified Random Walks (MRW)
2.4. Small Target Detection Algorithm Based on MRW
| Algorithm 1 Small target detection based on MRW |
| Input: Input image I |
| Output: Position of the target |
| 1: Initialization: , ; |
| 2: Construct the seeds selection map (SSM): |
| 3: for do |
| 4: for do |
| 5: for do |
| 6: Construct a sub-patch according to Equation (8); |
| 7: Find the pixel in that has minimum difference with , see Equation (9); |
| 8: The lth value of the local contrast element (i.e., ) is calculated by Equation (10); |
| 9: end for |
| 10: The value of the pixel in the SSM (i.e., ) is obtained by Equation (11). |
| 11: end for |
| 12: end for |
| 13: Adaptive seeds selection: |
| 14: Select the pixels in I with (refer to Equation (12) for ) as the foreground seeds. |
| 15: Modified random walks (MRW): |
| 16: for do |
| 17: for do |
| 18: Construct the modified Laplacian matrix according to Equation (13); |
| 19: end for |
| 20: end for |
| 21: for do |
| 22: Assign the label k to the kth foreground seed; |
| 23: The probability vector for the seeds is obtained by Equation (4); |
| 24: The probability vector for the unseeded pixels is computed by Equation (7); |
| 25: end for |
| 26: The composite is obtained by Equation (14). |
| 27: Reconstruct to a confidence map C with the same size of the input image I. |
| 28: Adaptive target segmentation: |
| 29: Segment the target placed in with (refer to Equation (15) for ). |
3. Experimental Results
3.1. Dataset and Evaluation Metrics
3.2. Sensitivity Analysis of Crucial Parameters
3.3. Analysis of Robustness to Noise
4. Comparison and Discussion
4.1. Comparison of Target Enhancement and Background Suppression
4.2. Comparison of Detection Performances
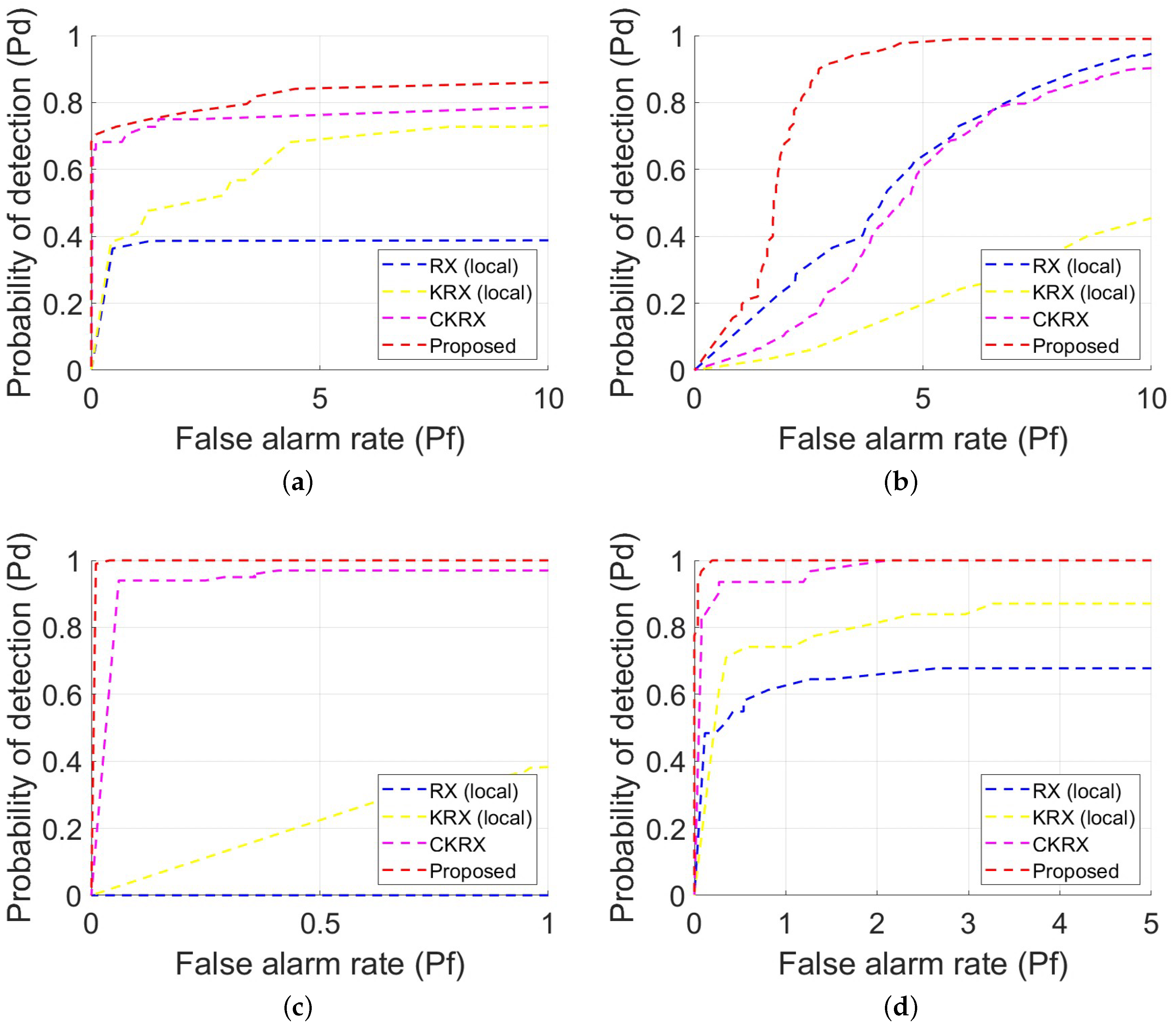
4.3. Comparison with RX-Related Methods
4.4. Computational Complexity
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, R.; Wang, D.; Jia, P.; Sun, H. An omnidirectional morphological method for aerial point target detection based on infrared dual-band model. Remote Sens. 2018, 10, 1054. [Google Scholar] [CrossRef]
- Cao, Y.; Wang, G.; Yan, D.; Zhao, Z. Two algorithms for the detection and tracking of moving vehicle targets in aerial infrared image sequences. Remote Sens. 2016, 8, 28. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, L.; Yuan, D.; Chen, H. Infrared small target detection based on local intensity and gradient properties. Infrared Phys. Technol. 2018, 89, 88–96. [Google Scholar] [CrossRef]
- Li, Z.Z.; Chen, J.; Hou, Q.; Fu, H.X.; Dai, Z.; Jin, G.; Li, R.Z.; Liu, C.J. Sparse representation for infrared dim target detection via a discriminative over-complete dictionary learned online. Sensors 2014, 14, 9451–9470. [Google Scholar] [CrossRef] [PubMed]
- Deng, H.; Wei, Y.; Tong, M. Small target detection based on weighted self-information map. Infrared Phys. Technol. 2013, 60, 197–206. [Google Scholar] [CrossRef]
- Liu, D.; Cao, L.; Li, Z.; Liu, T.; Che, P. Infrared small target detection based on flux density and direction diversity in gradient vector field. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018. [Google Scholar] [CrossRef]
- Bai, X.; Bi, Y. Derivative entropy-based contrast measure for infrared small-target detection. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2452–2466. [Google Scholar] [CrossRef]
- Nie, J.; Qu, S.; Wei, Y.; Zhang, L.; Deng, L. An infrared small target detection method based on multiscale local homogeneity measure. Infrared Phys. Technol. 2018, 90, 186–194. [Google Scholar] [CrossRef]
- Gu, Y.; Wang, C.; Liu, B.; Zhang, Y. A kernel-based nonparametric regression method for clutter removal in infrared small-target detection applications. IEEE Geosci. Remote Sens. Lett. 2010, 7, 469–473. [Google Scholar] [CrossRef]
- Chen, H.; Bar-Shalom, Y.; Pattipati, K.R.; Kirubarajan, T. MDL approach for multiple low observable track initiation. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 862–882. [Google Scholar] [CrossRef] [Green Version]
- Grossi, E.; Lops, M. Sequential along-track integration for early detection of moving targets. IEEE Trans. Signal Process. 2008, 56, 3969–3982. [Google Scholar] [CrossRef]
- Grossi, E.; Lops, M.; Venturino, L. A novel dynamic programming algorithm for track-before-detect in radar systems. IEEE Trans. Signal Process. 2013, 61, 2608–2619. [Google Scholar] [CrossRef]
- Moradi, S.; Moallem, P.; Sabahi, M.F. A false-alarm aware methodology to develop robust and efficient multi-scale infrared small target detection algorithm. Infrared Phys. Technol. 2018, 89, 387–397. [Google Scholar] [CrossRef]
- Li, Y.; Liang, S.; Bai, B.; Feng, D. Detecting and tracking dim small targets in infrared image sequences under complex backgrounds. Multimedia Tools Appl. 2014, 71, 1179–1199. [Google Scholar] [CrossRef]
- Huang, C.; Li, Y.; Nevatia, R. Multiple target tracking by learning-based hierarchical association of detection responses. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 898–910. [Google Scholar] [CrossRef] [PubMed]
- Guo, J.; Wu, Y.; Dai, Y. Small target detection based on reweighted infrared patch-image model. IET Image Process. 2018, 12, 70–79. [Google Scholar] [CrossRef]
- Tang, W.; Zheng, Y.; Lu, R.; Huang, X. A novel infrared dim small target detection algorithm based on frequency domain saliency. In Proceedings of the 2016 IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 3–5 October 2016; pp. 1053–1057. [Google Scholar] [CrossRef]
- Bi, Y.; Bai, X.; Jin, T.; Guo, S. Multiple feature analysis for infrared small target detection. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1333–1337. [Google Scholar] [CrossRef]
- Deshpande, S.D.; Er, M.H.; Venkateswarlu, R.; Chan, P. Max-mean and max-median filters for detection of small targets. SPIE Proc. 1999, 3809, 74–84. [Google Scholar] [CrossRef]
- Bai, X.; Zhou, F. Analysis of new top-hat transformation and the application for infrared dim small target detection. Pattern Recognit. 2010, 43, 2145–2156. [Google Scholar] [CrossRef]
- Zhou, J.; Lv, H.; Zhou, F. Infrared small target enhancement by using sequential top-hat filters. In Proceedings of the International Symposium on Optoelectronic Technology and Application 2014: Image Processing and Pattern Recognition, Beijing, China, 13–15 May 2014; Volume 9301, p. 93011. [Google Scholar] [CrossRef]
- Kim, S.; Lee, J. Scale invariant small target detection by optimizing signal-to-clutter ratio in heterogeneous background for infrared search and track. Pattern Recognit. 2012, 45, 393–406. [Google Scholar] [CrossRef]
- Fan, H.; Wen, C. Two-dimensional adaptive filtering based on projection algorithm. IEEE Trans. Signal Process. 2004, 52, 832–838. [Google Scholar] [CrossRef]
- Bae, T.W. Small target detection using bilateral filter and temporal cross product in infrared images. Infrared Phys. Technol. 2011, 54, 403–411. [Google Scholar] [CrossRef]
- Bae, T.W.; Sohng, K.I. Small target detection using bilateral filter based on edge component. J. Infrared Millim. Terahertz Waves 2010, 31, 735–743. [Google Scholar] [CrossRef]
- Chen, C.L.P.; Li, H.; Wei, Y.; Xia, T.; Tang, Y.Y. A local contrast method for small infrared target detection. IEEE Trans. Geosci. Remote Sens. 2014, 52, 574–581. [Google Scholar] [CrossRef]
- Han, J.; Liang, K.; Zhou, B.; Zhu, X.; Zhao, J.; Zhao, L. Infrared small target detection utilizing the multiscale relative local contrast measure. IEEE Geosci. Remote Sens. Lett. 2018, 15, 612–616. [Google Scholar] [CrossRef]
- Deng, H.; Sun, X.; Liu, M.; Ye, C.; Zhou, X. Small infrared target detection based on weighted local difference Measure. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4204–4214. [Google Scholar] [CrossRef]
- Deng, H.; Sun, X.; Liu, M.; Ye, C.; Zhou, X. Infrared small-target detection using multiscale gray difference weighted image entropy. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 60–72. [Google Scholar] [CrossRef]
- Deng, H.; Sun, X.; Liu, M.; Ye, C.; Zhou, X. Entropy-based window selection for detecting dim and small infrared targets. Pattern Recognit. 2017, 61, 66–77. [Google Scholar] [CrossRef]
- Qi, S.; Ma, J.; Tao, C.; Yang, C.; Tian, J. A robust directional saliency-based method for infrared small-target detection under various complex backgrounds. IEEE Geosci. Remote Sens. Lett. 2013, 10, 495–499. [Google Scholar] [CrossRef]
- Zhao, J.; Feng, H.; Xu, Z.; Li, Q.; Peng, H. Real-time automatic small target detection using saliency extraction and morphological theory. Opt. Laser Technol. 2013, 47, 268–277. [Google Scholar] [CrossRef]
- Candès, E.J.; Li, X.; Ma, Y.; Wright, J. Robust principal component analysis? J. ACM 2011, 58, 11:1–11:37. [Google Scholar] [CrossRef]
- Gao, C.; Meng, D.; Yang, Y.; Wang, Y.; Zhou, X.; Hauptmann, A.G. Infrared patch-image model for small target detection in a single image. IEEE Trans. Image Process. 2013, 22, 4996–5009. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Qin, S. Adaptive detection method of infrared small target based on target-background separation via robust principal component analysis. Infrared Phys. Technol. 2015, 69, 123–135. [Google Scholar] [CrossRef]
- Li, Y.; Song, Y.; Zhao, Y.; Zhao, S.; Li, X.; Li, L.; Tang, S. An infrared target detection algorithm based on lateral inhibition and singular value decomposition. Infrared Phys. Technol. 2017, 85, 238–245. [Google Scholar] [CrossRef]
- Dai, Y.; Wu, Y.; Song, Y.; Guo, J. Non-negative infrared patch-image model: Robust target-background separation via partial sum minimization of singular values. Infrared Phys. Technol. 2017, 81, 182–194. [Google Scholar] [CrossRef]
- Wang, P. Infrared small target detection using directional highpass filters based on LS-SVM. Electron. Lett. 2009, 45, 156–158. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Y. Robust infrared small target detection using local steering kernel reconstruction. Pattern Recognit. 2018, 77, 113–125. [Google Scholar] [CrossRef]
- Gao, C.; Wang, L.; Xiao, Y.; Zhao, Q.; Meng, D. Infrared small-dim target detection based on Markov random field guided noise modeling. Pattern Recognit. 2018, 76, 463–475. [Google Scholar] [CrossRef]
- Li, H.; Wei, Y.; Li, L.; Tang, Y.Y. Infrared moving target detection and tracking based on tensor locality preserving projection. Infrared Phys. Technol. 2010, 53, 77–83. [Google Scholar] [CrossRef]
- Khan, J.F.; Alam, M.S. Target detection in cluttered forward-looking infrared imagery. Opt. Eng. 2005, 44, 076404. [Google Scholar] [CrossRef]
- Shirvaikar, M.V.; Trivedi, M.M. A neural network filter to detect small targets in high clutter backgrounds. IEEE Trans. Neural Netw. 1995, 6, 252–257. [Google Scholar] [CrossRef] [PubMed]
- Reed, I.S.; Yu, X. Adaptive multiple-band CFAR detection of an optical pattern with unknown spectral distribution. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1760–1770. [Google Scholar] [CrossRef]
- Kwon, H.; Nasrabadi, N.M. Kernel RX-algorithm: A nonlinear anomaly detector for hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 388–397. [Google Scholar] [CrossRef]
- Zhou, J.; Kwan, C.; Ayhan, B.; Eismann, M.T. A novel cluster Kernel RX algorithm for anomaly and change detection using hyperspectral images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6497–6504. [Google Scholar] [CrossRef]
- Grady, L. Random walks for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 1768–1783. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Yuan, Y.; Cai, W.; Xia, Y.; Feng, D.D. Robust saliency detection via regularized random walks ranking. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 2710–2717. [Google Scholar] [CrossRef]
- Gopalakrishnan, V.; Hu, Y.; Rajan, D. Random walks on graphs for salient object detection in images. IEEE Trans. Image Process. 2010, 19, 3232–3242. [Google Scholar] [CrossRef] [PubMed]
- Lloyd, S. Least squares quantization in PCM. IEEE Trans. Inf. Theory 1982, 28, 129–137. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Li, H.; Li, T.; Gao, F. Infrared small target detection in compressive domain. Electron. Lett. 2014, 50, 510–512. [Google Scholar] [CrossRef]
- Wei, Y.; You, X.; Li, H. Multiscale patch-based contrast measure for small infrared target detection. Pattern Recognit. 2016, 58, 216–226. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| d = 3 | d = 5 | d = 7 | d = 9 | d = 11 | d = 13 | ||
|---|---|---|---|---|---|---|---|
| Seq 1 | 8.4383 | 11.8134 | 12.3235 | 13.2478 | 13.2818 | 12.9601 | |
| 15.2645 | 17.9574 | 19.6027 | 19.6489 | 18.2879 | 18.2440 | ||
| Seq 2 | 10.4703 | 10.8178 | 15.1055 | 15.8983 | 15.9998 | 16.0171 | |
| 53.5936 | 50.5754 | 57.2290 | 55.6125 | 53.9464 | 52.9188 | ||
| Seq 3 | 6.7753 | 6.8763 | 7.2176 | 7.3431 | 7.3740 | 7.3768 | |
| 54.3929 | 61.5580 | 72.5739 | 74.3424 | 73.8086 | 72.9750 | ||
| Set R | 5.0603 | 5.9314 | 6.0667 | 6.0954 | 6.0439 | 6.0453 | |
| 16.0908 | 19.5771 | 21.0352 | 20.3556 | 19.4511 | 18.6230 | ||
| Raw Image | Confidence Map | Noise-Added Image | Confidence Map | |
|---|---|---|---|---|
| Figure 6a | 0.1120 | 0.9716 | 0.1001 | 0.8543 |
| Figure 6b | 0.1360 | 0.9863 | 0.1278 | 0.9562 |
| Figure 6c | 0.1491 | 0.9895 | 0.0992 | 0.9685 |
| Figure 6d | 0.0920 | 0.9776 | 0.0837 | 0.9603 |
| THT | MPCM | NIPPS | GDD-MFD | LSK | MRW (Ours) | ||
|---|---|---|---|---|---|---|---|
| Seq 1 | 12.7690 | 1.6411 | 11.5069 | 3.2155 | 13.9788 | 13.2818 | |
| 3.5883 | 4.0456 | 3.4685 | 3.4350 | 17.0702 | 18.2879 | ||
| Seq 2 | 2.8119 | 1.7078 | 11.3092 | 2.5913 | 12.6941 | 15.9998 | |
| 19.2082 | 7.3354 | 7.3544 | 6.7750 | 43.1069 | 53.9464 | ||
| Seq 3 | 7.1285 | 1.1596 | 6.1982 | 1.6439 | 7.0014 | 7.3740 | |
| 25.5728 | 12.4371 | 9.2242 | 9.6839 | 62.7293 | 73.8086 | ||
| Set R | 4.7732 | 1.4484 | 4.2882 | 1.1869 | 5.7011 | 6.0954 | |
| 5.2039 | 6.3063 | 4.8676 | 4.7243 | 17.6723 | 21.0352 | ||
| THT | MPCM | NIPPS | GDD-MFD | LSK | LRX | LKRX | CKRX | MRW (Ours) | |
|---|---|---|---|---|---|---|---|---|---|
| Seq 1 | 0.0429 | 3.3479 | 3.1729 | 2.7777 | 25.5441 | 20.7095 | 119.8360 | 13.3303 | 0.4288 |
| Seq 2 | 0.0303 | 5.2819 | 9.5939 | 4.4714 | 43.1069 | 34.6333 | 134.4858 | 31.0786 | 0.7543 |
| Seq 3 | 0.0313 | 7.6518 | 12.8935 | 4.1875 | 66.1112 | 49.7072 | 148.9765 | 18.7797 | 0.9256 |
| Set R | 0.0442 | 1.6208 | 1.6079 | 1.0004 | 12.8281 | 6.1094 | 29.4660 | 4.2343 | 1.2653 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, C.; Li, X.; Zhao, L. Infrared Small Target Detection via Modified Random Walks. Remote Sens. 2018, 10, 2004. https://doi.org/10.3390/rs10122004
Xia C, Li X, Zhao L. Infrared Small Target Detection via Modified Random Walks. Remote Sensing. 2018; 10(12):2004. https://doi.org/10.3390/rs10122004
Chicago/Turabian StyleXia, Chaoqun, Xiaorun Li, and Liaoying Zhao. 2018. "Infrared Small Target Detection via Modified Random Walks" Remote Sensing 10, no. 12: 2004. https://doi.org/10.3390/rs10122004
APA StyleXia, C., Li, X., & Zhao, L. (2018). Infrared Small Target Detection via Modified Random Walks. Remote Sensing, 10(12), 2004. https://doi.org/10.3390/rs10122004