Potential Applications of GNSS-R Observations over Agricultural Areas: Results from the GLORI Airborne Campaign

 ,
, 
 , ,
, , 
Abstract
:1. Introduction
2. Dataset and Methods
2.1. GNSS-R Airborne Data
2.1.1. Instrument
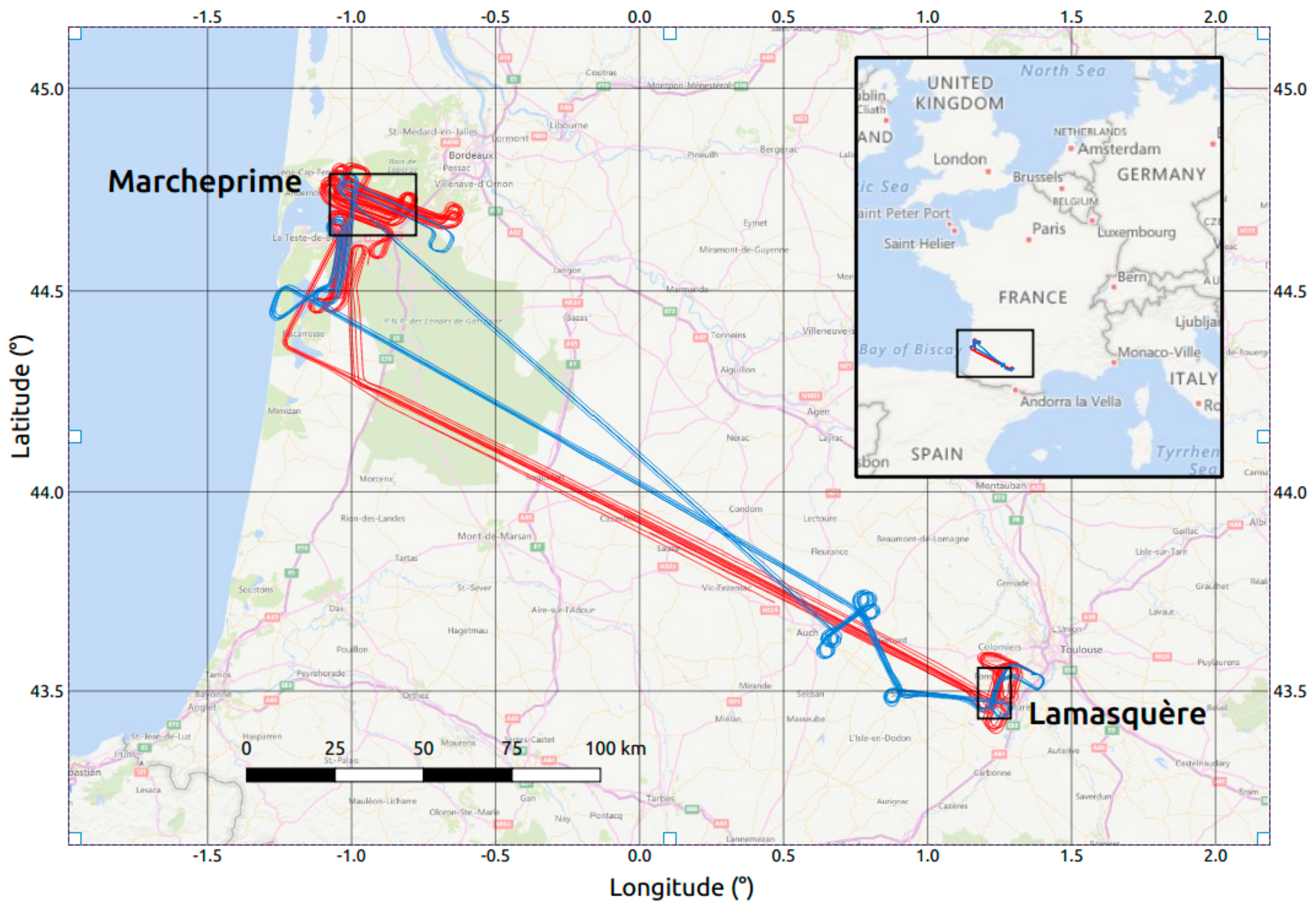
2.1.2. Airborne Campaigns
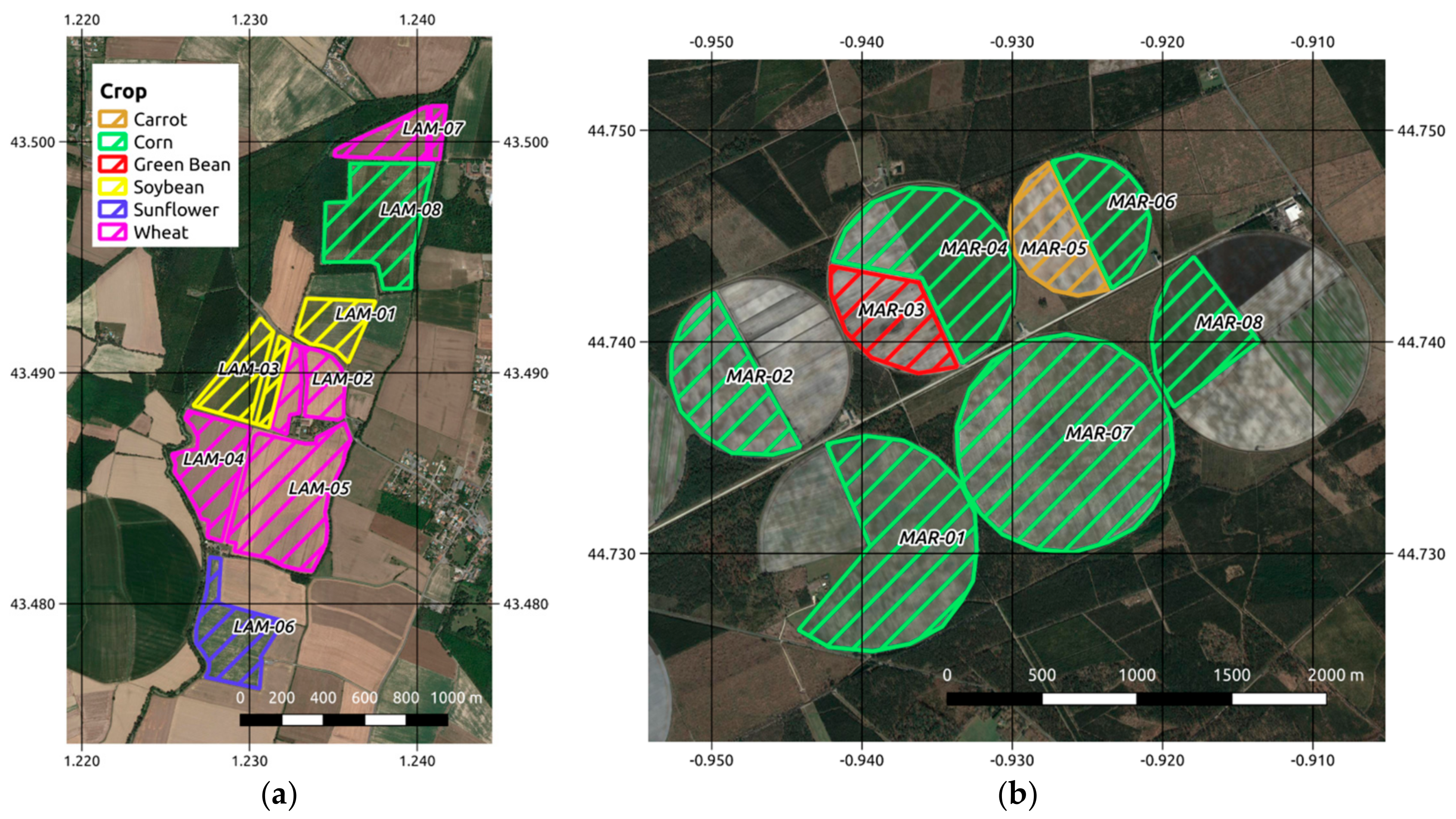
2.2. In Situ Data
2.2.1. Soil Moisture
2.2.2. Vegetation
- Leaf area index
- Vegetation height
2.3. GNSS-R Data Processing
- GNSS processing of the raw data stream
- Acquisition and tracking of the modulated signal to compute correlation waveforms
- Time tagging and extraction of waveform maxima as described in [32]
- Processing of the navigation message to recover the transmission time, and extraction of the correlation power
- Instrument corrections and incoherent averaging
- Correction for antenna gain and instrumental noise, incoherent averaging and reflectivity computation
- Geo-location and merging of individual files
- Computation of the location and surface shape of each footprint, merging of individual measurements into a consolidated file
3. Data Analysis
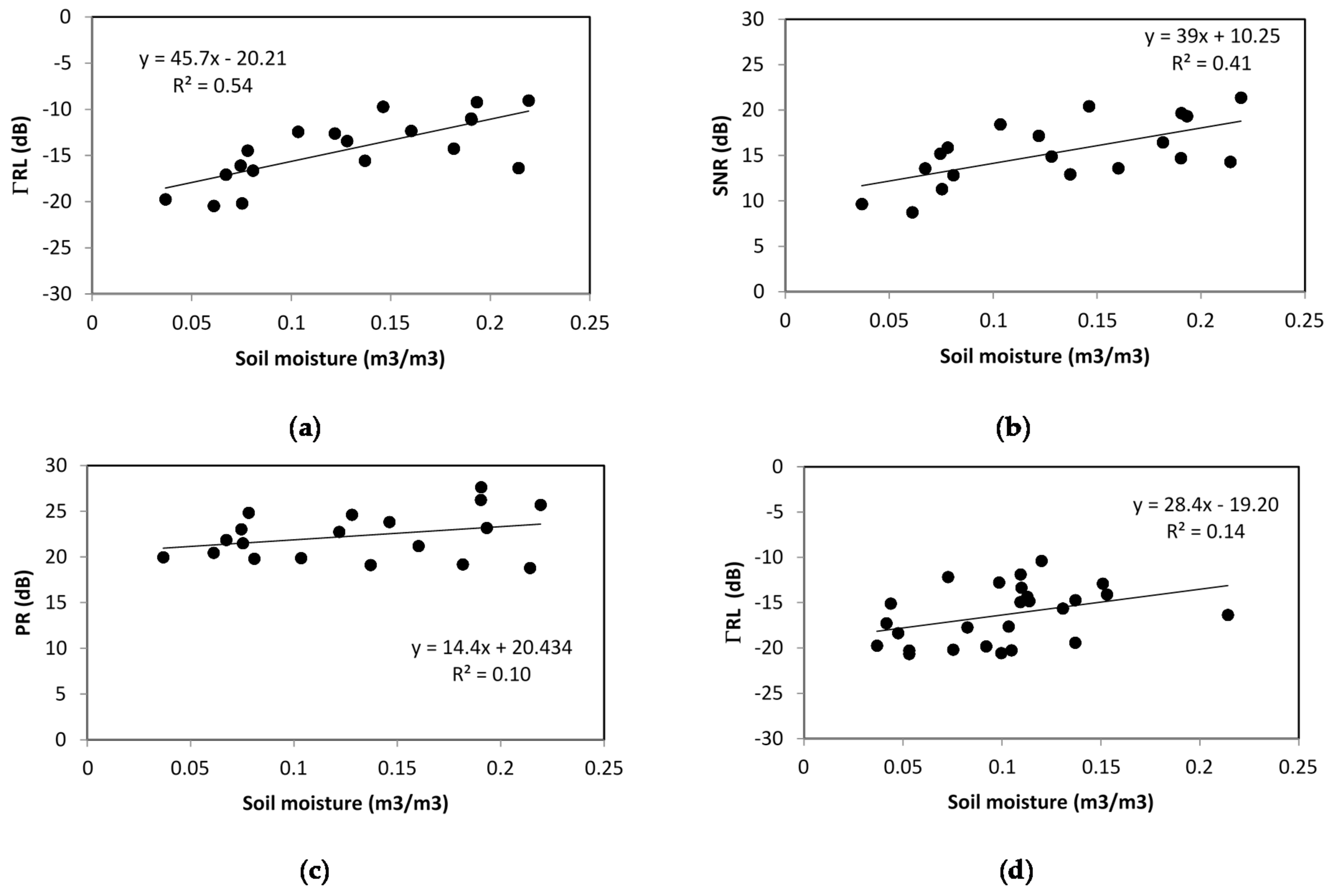
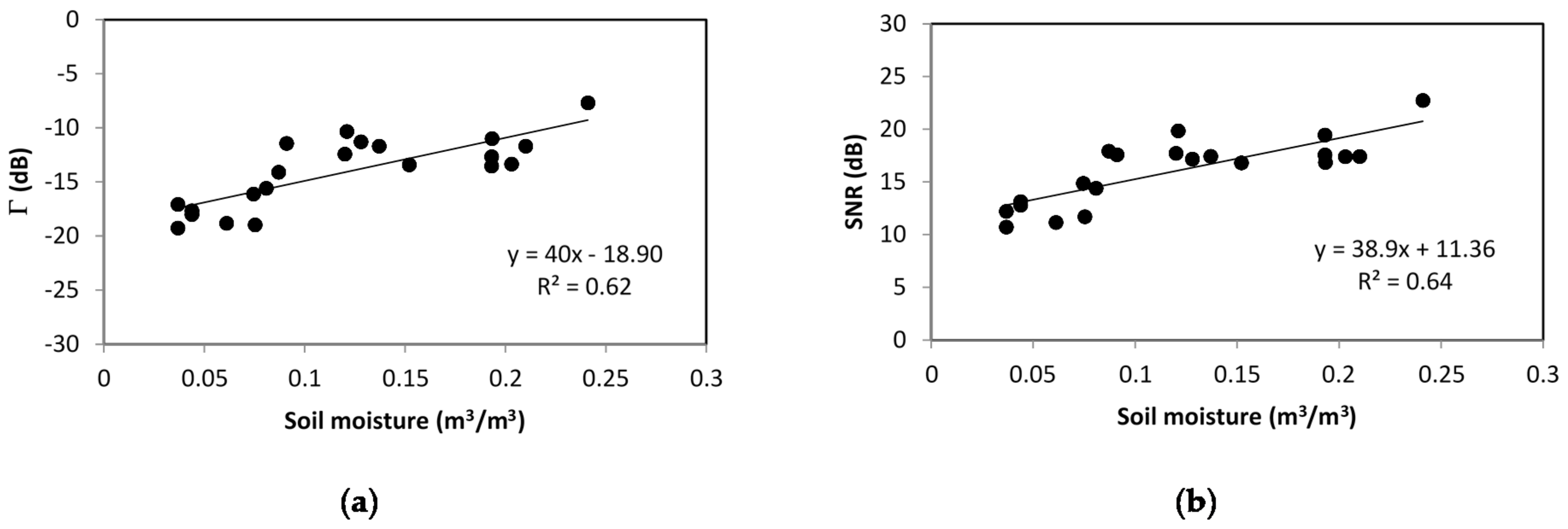
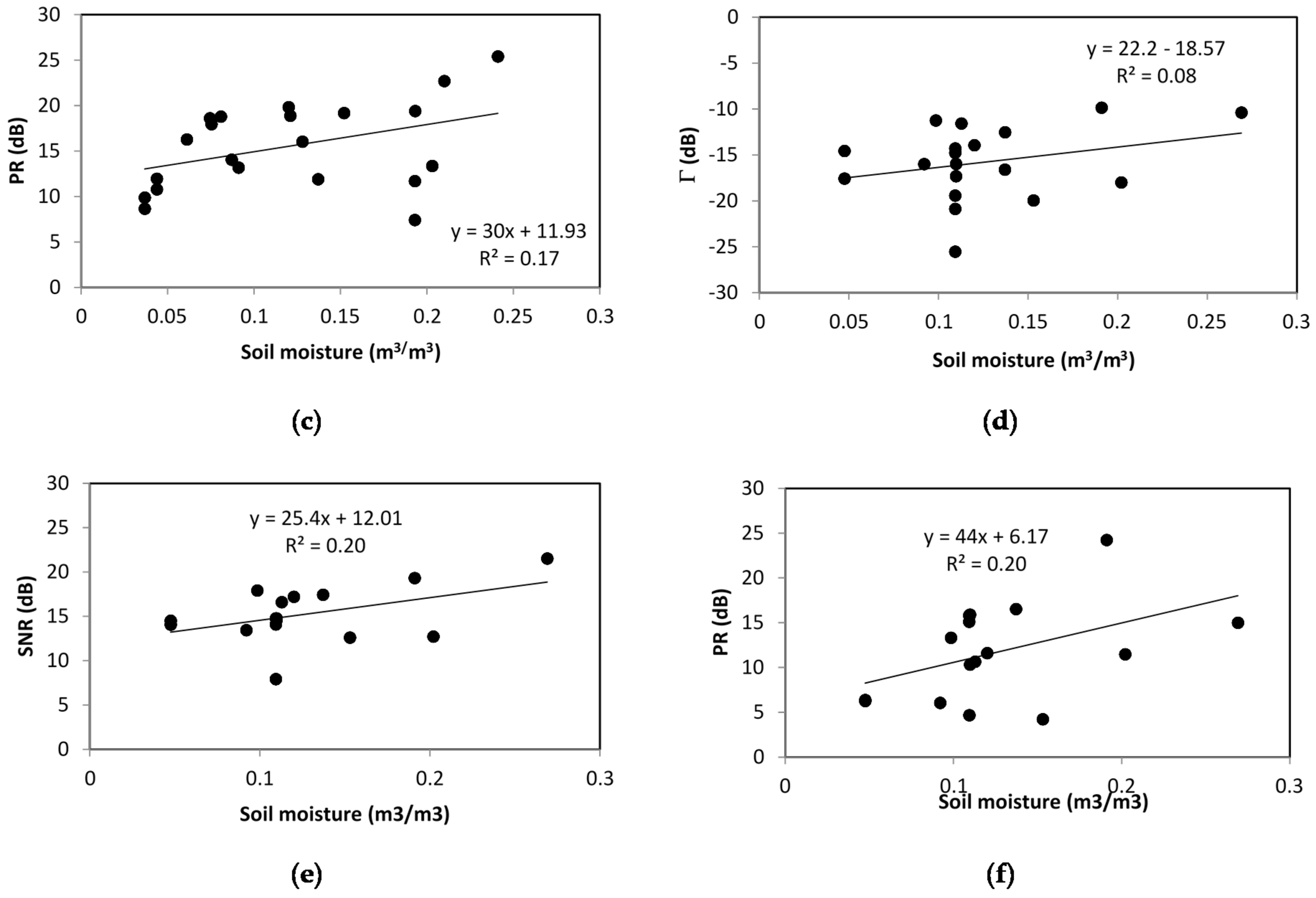
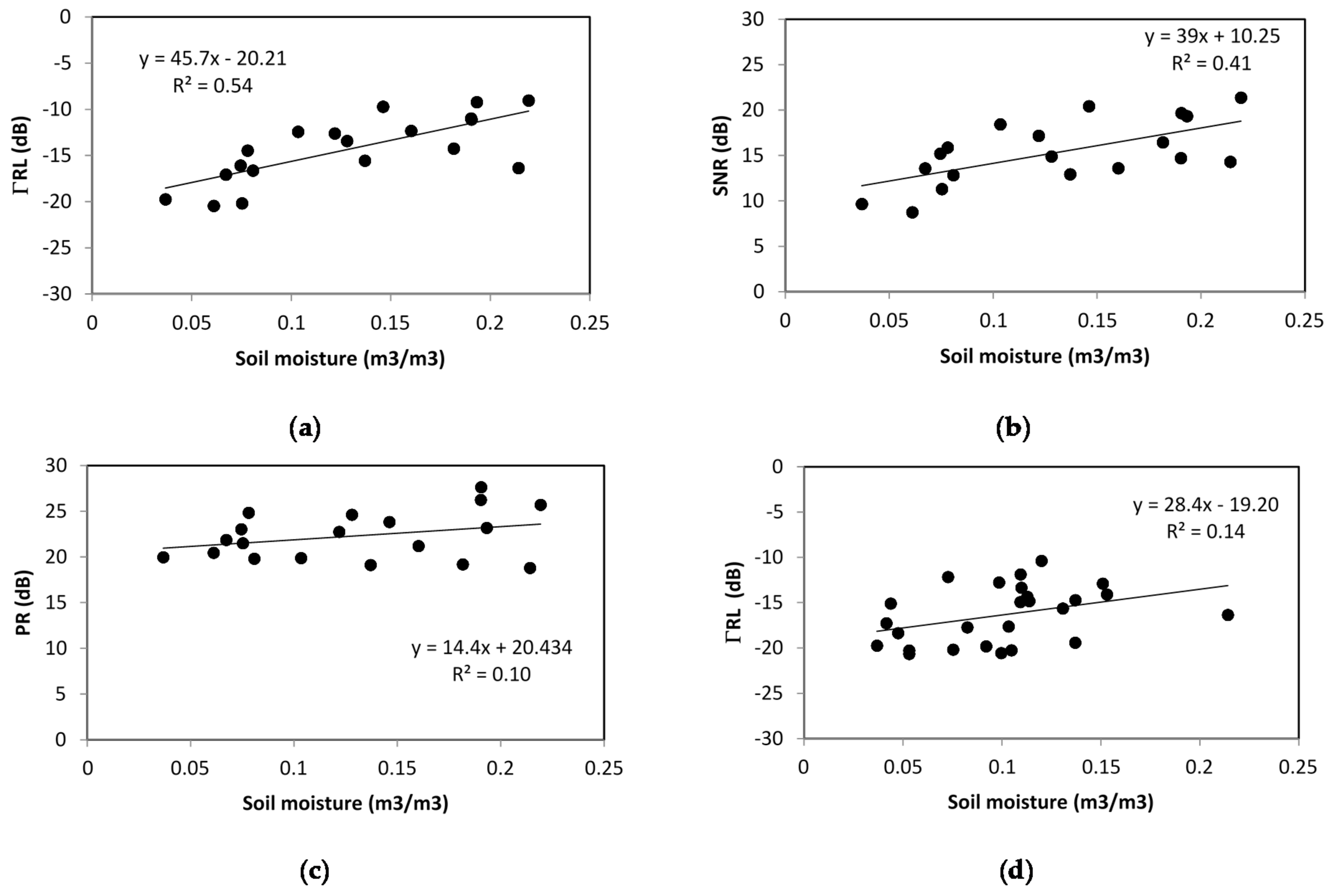
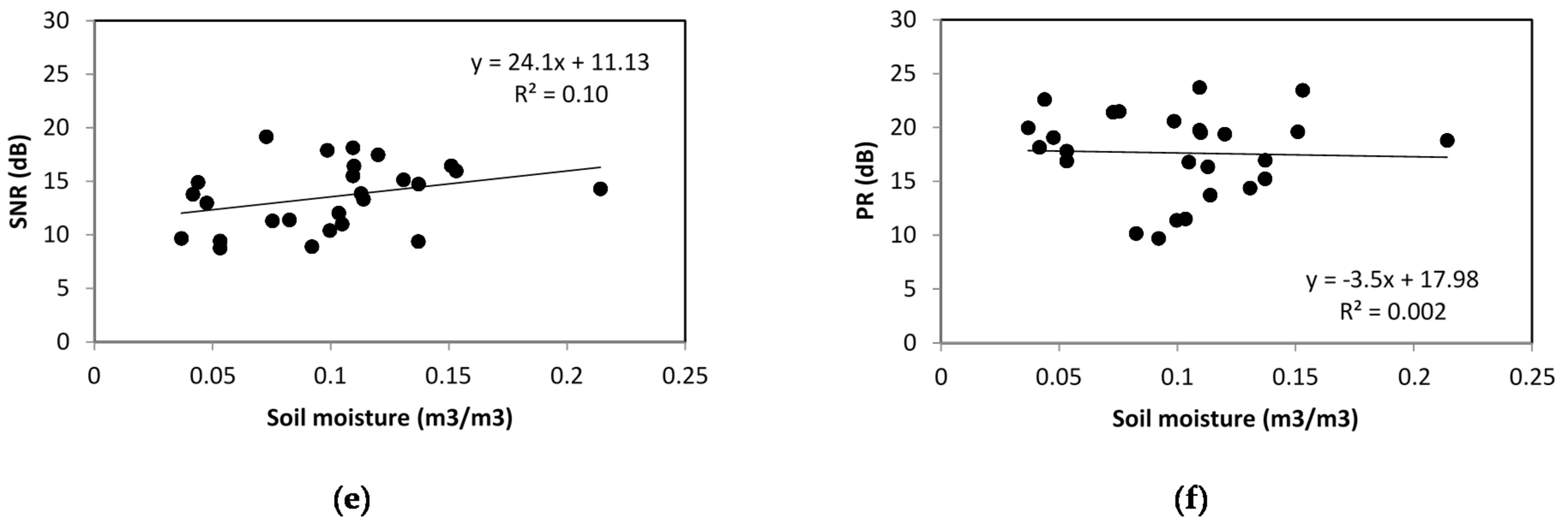
3.1. Relationships between GNSS-R Observables and Soil Moisture
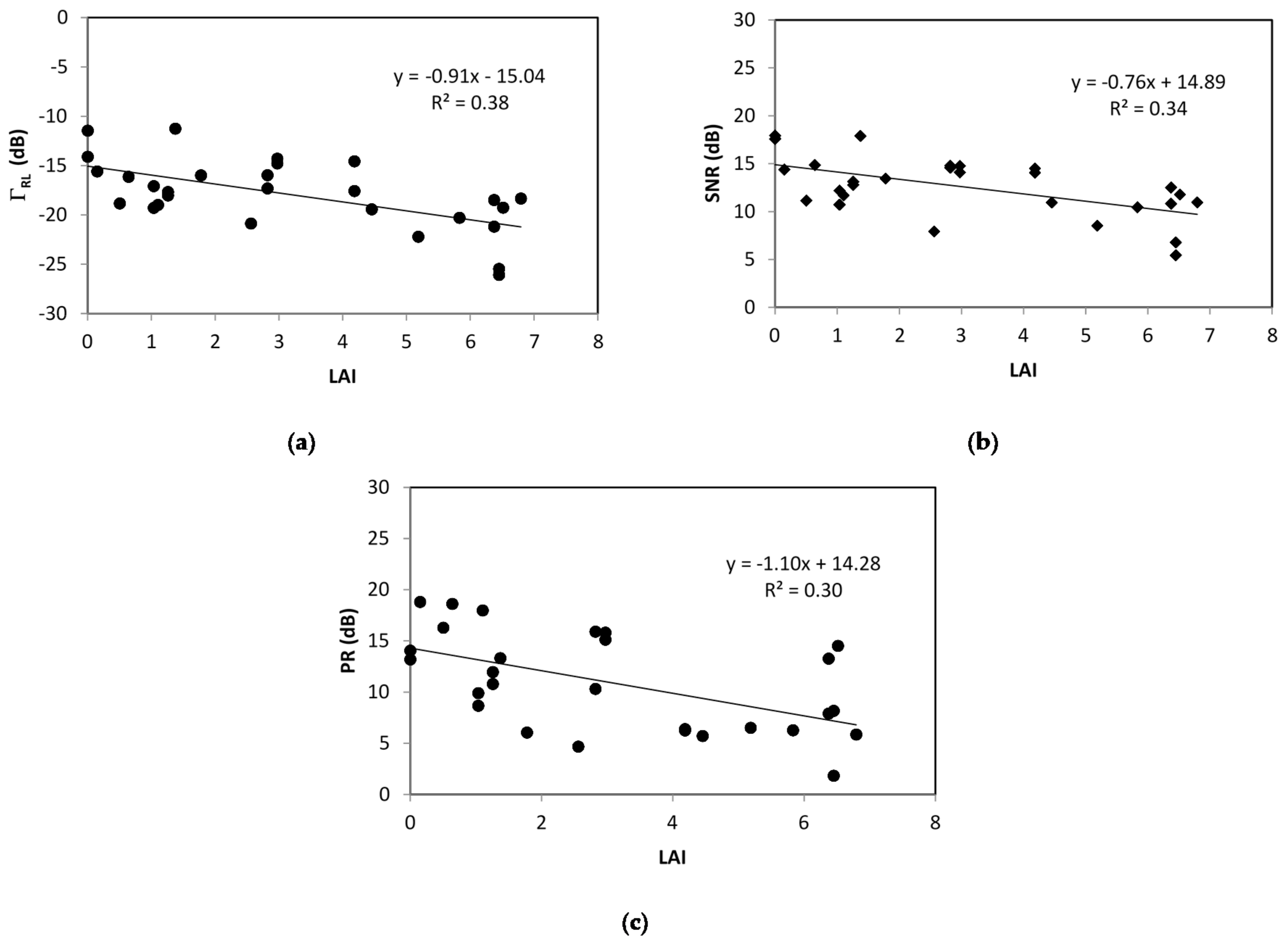
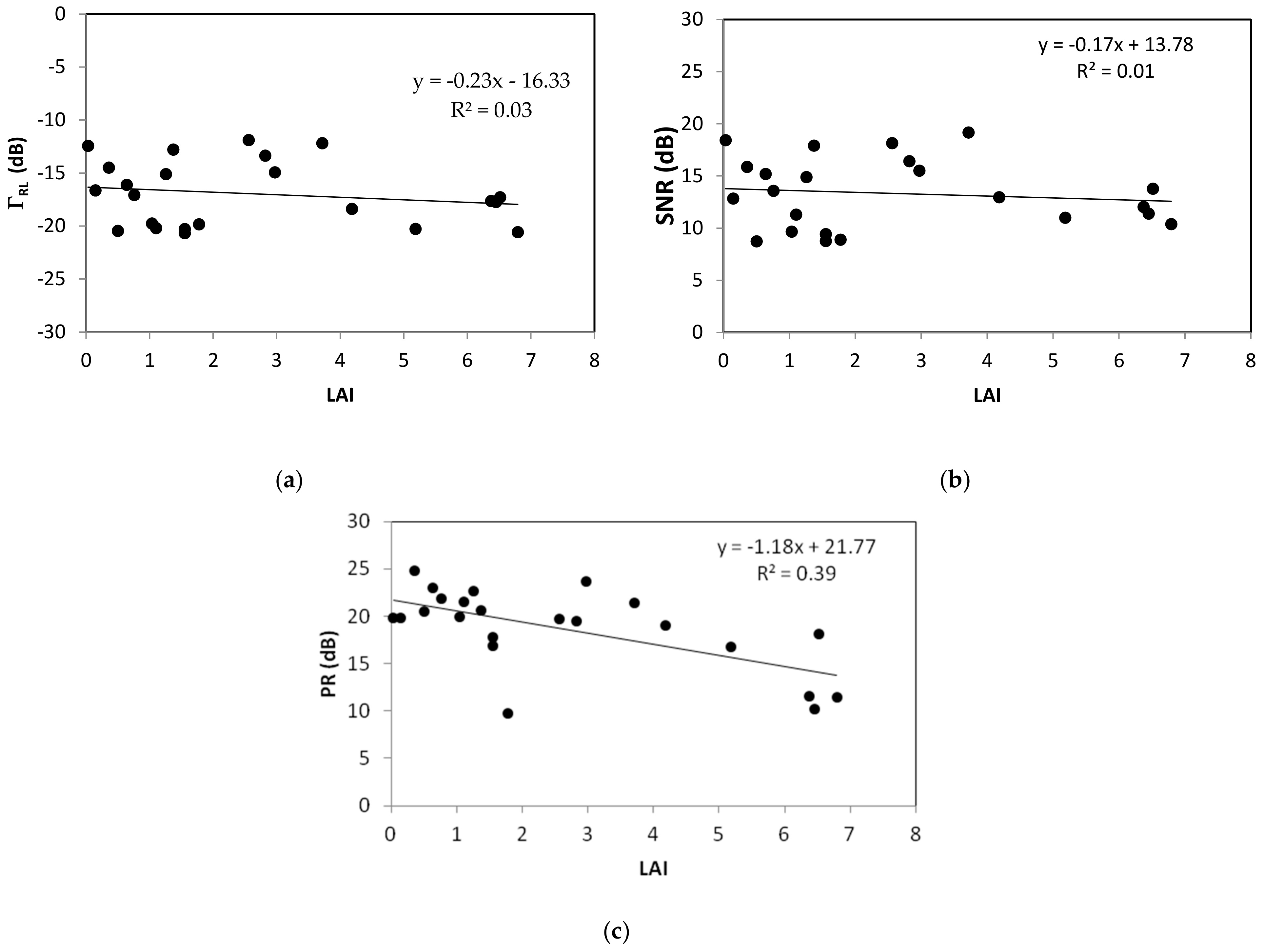
3.2. Relationships between GNSS-R Observables and Vegetation Parameters
4. Modeling and Inversion of GNSS-R Reflectivity
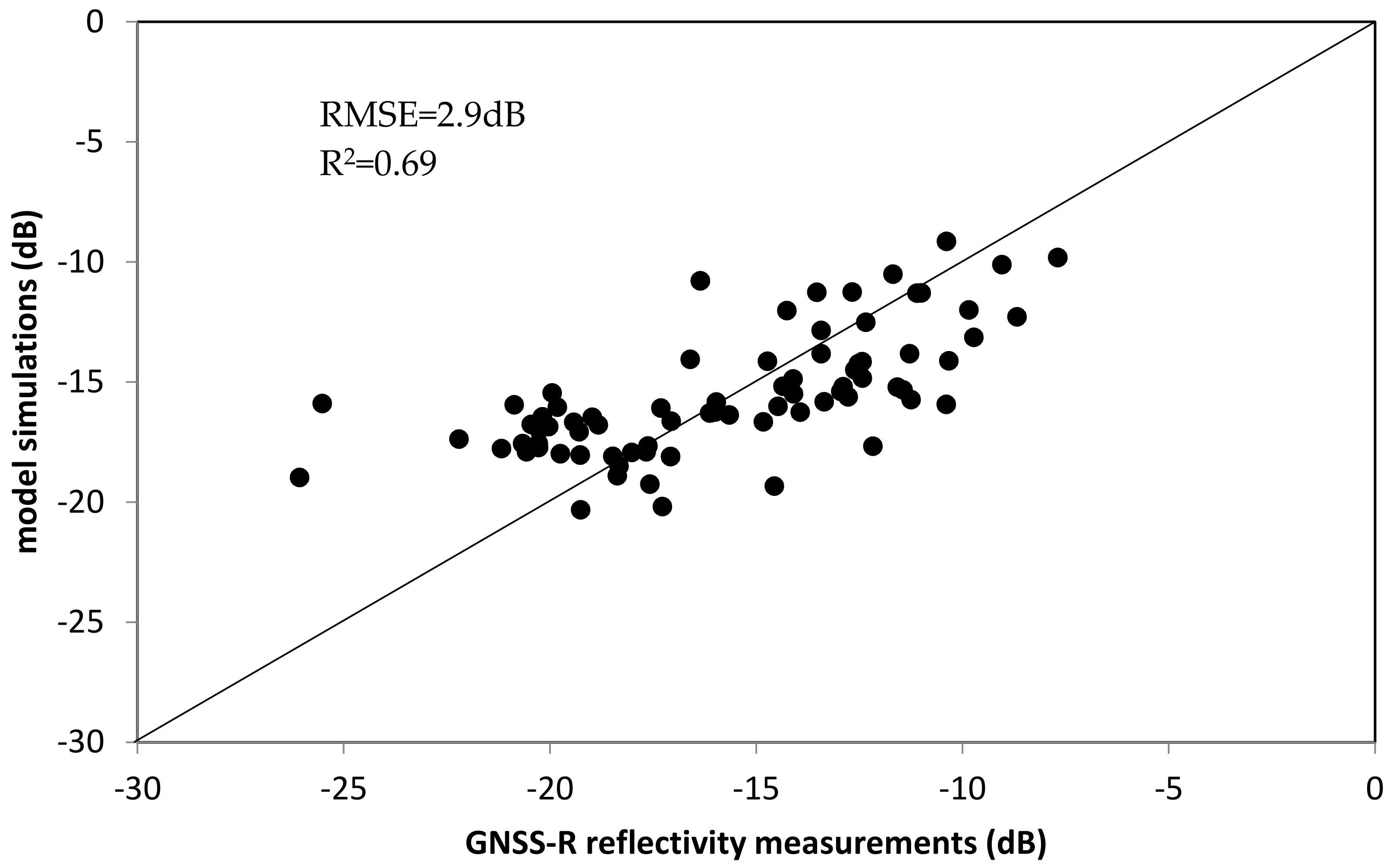
4.1. Modeling of GNSS-R Reflectivity
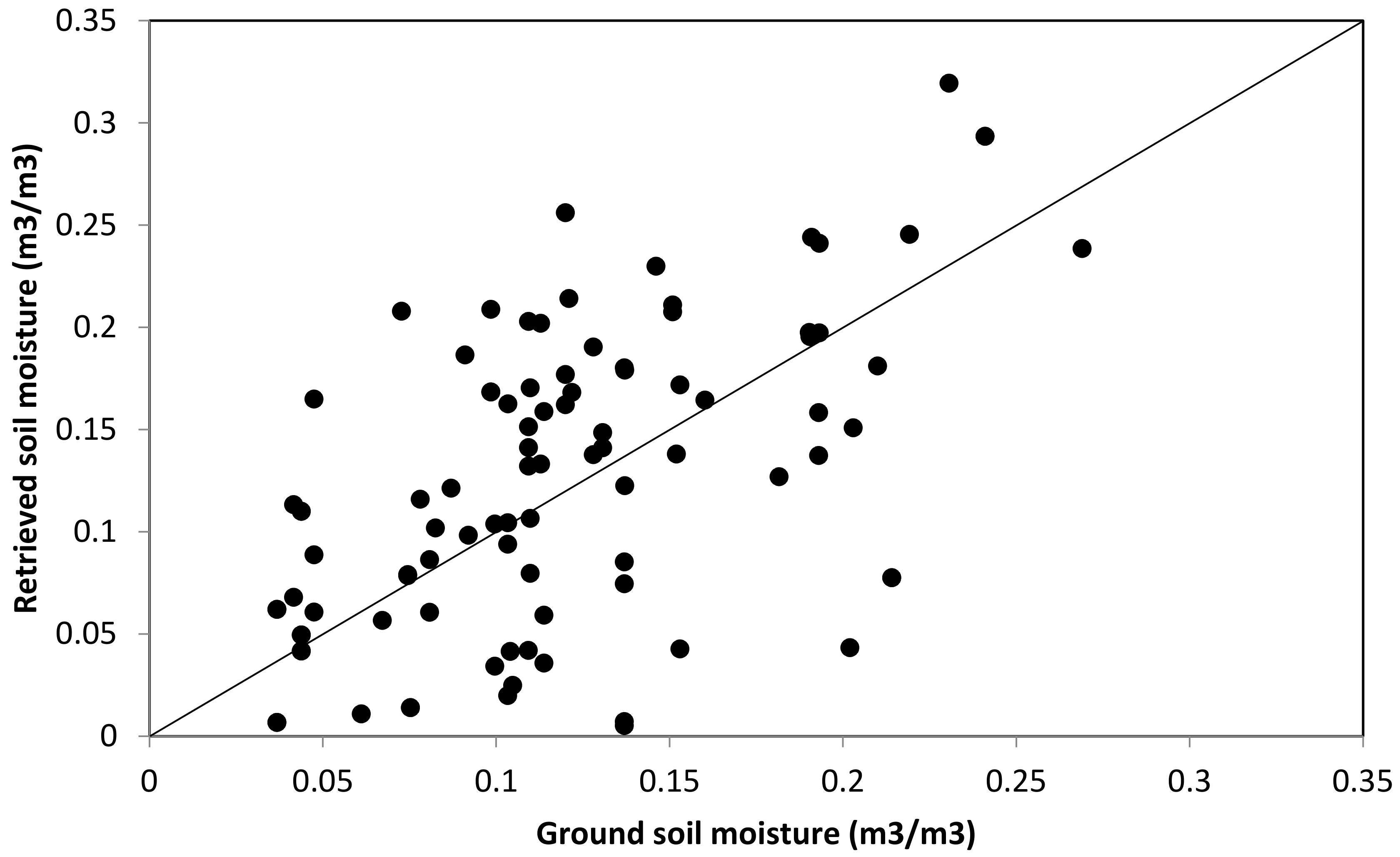
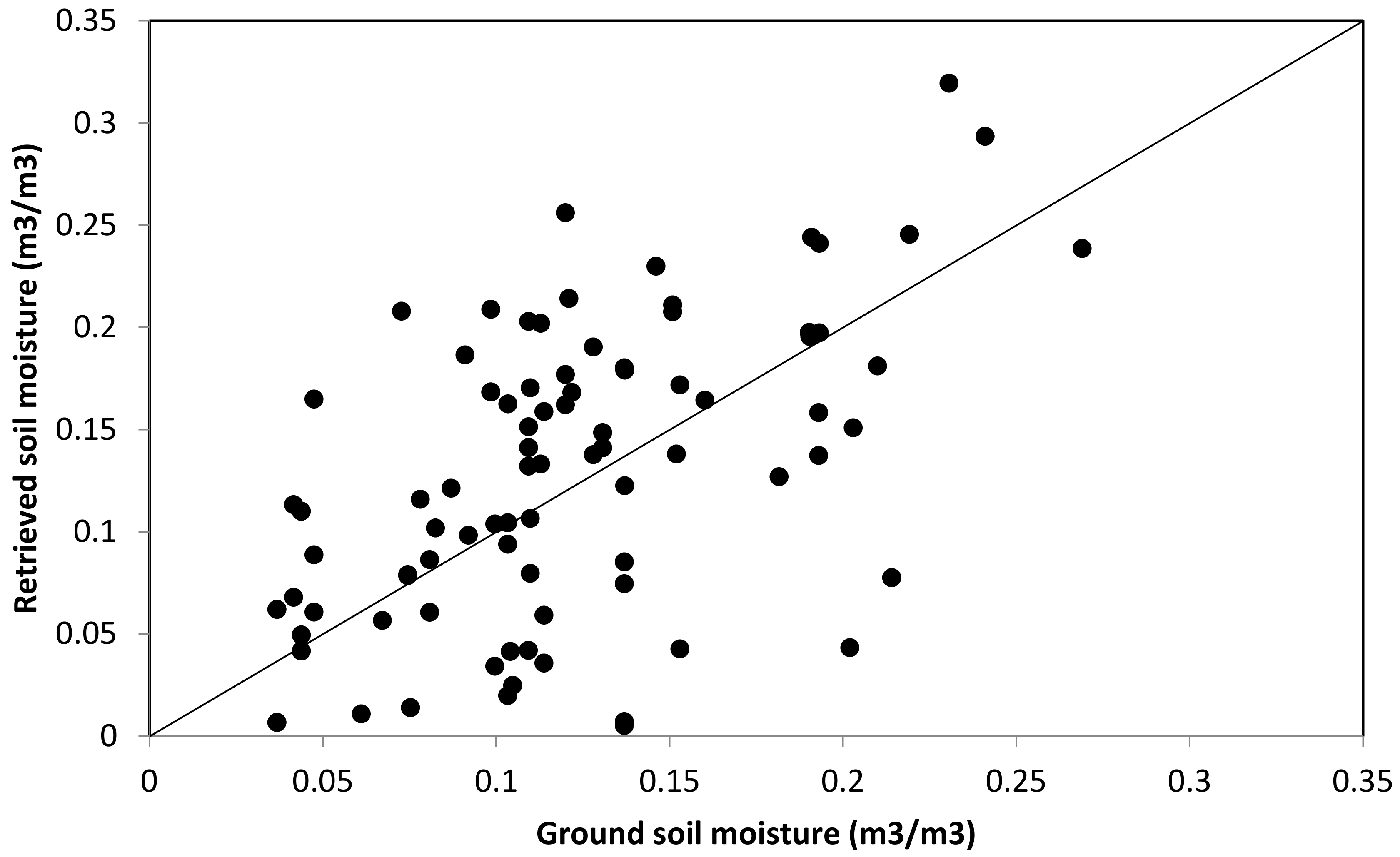
4.2. Application to the GLORI Data
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Koster, R.D.; Dirmeyer, P.A.; Guo, Z.; Bonan, G.; Chan, E.; Cox, P.; Gordon, C.T.; Kanae, S.; Kowalczyk, E.; Lawrence, D.; et al. Regions of Strong Coupling Between Soil Moisture and Precipitation. Science 2004, 305, 1138–1140. [Google Scholar] [CrossRef] [PubMed]
- Manfreda, S.; Scanlon, T.M.; Caylor, K.K. On the importance of accurate depiction of infiltration processes on modelled soil moisture and vegetation water stress. Ecohydrology 2009, 3, 155–165. [Google Scholar] [CrossRef]
- Saux-Picart, S.; Ottlé, C.; Decharme, B.; André, C.; Zribi, M.; Perrier, A.; Coudert, B.; Boulain, N.; Cappelaere, B. Water and Energy budgets simulation over the Niger super site spatially constrained with remote sensing data. J. Hdrol. 2009, 375, 287–295. [Google Scholar] [CrossRef]
- Zhuo, L.; Han, D. The relevance of soil moisture by remote sensing and hydrological modelling. Procedia Eng. 2016, 154, 1368–1375. [Google Scholar] [CrossRef]
- Fieuzal, R.; Duchemin, B.; Jarlan, L.; Zribi, M.; Baup, F.; Merlin, O.; Dedieu, G.; Garatuza-Payan, J.; Watt, C.; Chehbouni, A. Combined use of optical and radar satellite data for the monitoring of irrigation and soil moisture of wheat crops. Hydrol. Earth Syst. Sci. 2011, 15, 1117–1129. [Google Scholar] [CrossRef] [Green Version]
- Paloscia, S.; Macelloni, G.; Santi, E. Soil Moisture Estimates from AMSR-E Brightness Temperatures by Using a Dual-Frequency Algorithm. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3135–3144. [Google Scholar] [CrossRef]
- Wagner, W.; Lemoine, G.; Rott, H. A Method for Estimating Soil Moisture from ERS Scatterometer and Soil Data. Remote Sens. Environ. 1999, 70, 191–207. [Google Scholar] [CrossRef]
- Fernandez-Moran, R.; Al-Yaari, A.; Mialon, A.; Mahmoodi, A.; Al Bitar, A.; De Lannoy, G.; Rodriguez-Fernandez, N.; Lopez-Baeza, E.; Kerr, Y.; Wigneron, J.P. SMOS-IC: An alternative SMOS soil moisture and vegetation optical depth product. Remote Sens. 2017, 9, 457. [Google Scholar] [CrossRef]
- Rodríguez-Fernández, N.J.; Aires, F.; Richaume, F.; Kerr, Y.H.; Prigent, C.; Kolassa, J.; Cabot, F.; Jiménez, C.; Mahmoodi, A.; Drusch, M. Soil moisture retrieval using neural networks: Application to SMOS. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5991–6007. [Google Scholar] [CrossRef]
- Fratanellli, G.; Paloscia, S.; Zribi, M.; Chahbi, A. Sensitivity analysis of X-band SAR to wheat and barley biomass in the Merguellil Basin. Remote Sens. Lett. 2013, 4, 1107–1116. [Google Scholar] [CrossRef]
- Zribi, M.; Gorrab, A.; Baghdadi, N. A new soil roughness parameter for the modelling of radar backscattering over bare soil. Remote Sens. Environ. 2014, 152, 62–73. [Google Scholar] [CrossRef] [Green Version]
- Tomer, S.K.; Al Bitar, A.; Sekhar, M.; Corgne, S.; Bandyopadhyay, S.; Sreelash, K.; Sharma, A.K.; Zribi, M.; Kerr, Y. Retrieval and Multi-scale Validation of Soil Moisture from Multi-temporal SAR Data in a Tropical Region. Remote Sens. 2015, 7, 8128–8153. [Google Scholar] [CrossRef]
- Martin-Neira, M. A Passive Reflectometry and Interferometry System(PARIS): Application to Ocean Altimetry. ESA J. 1993, 17, 331–355. [Google Scholar]
- Zavorotny, V.U.; Gleason, S.; Cardellach, E.; Camps, A. Tutorial on Remote Sensing Using GNSS Bistatic Radar of Opportunity. IEEE Geosci. Remote Sens. Mag. 2014, 2, 8–45. [Google Scholar] [CrossRef] [Green Version]
- Masters, D.; Axelrad, P.; Katzberg, S. Initial results of land-reflected GPS bistatic radar measurements in SMEX02. Remote Sens. Environ. 2004, 92, 507–520. [Google Scholar] [CrossRef]
- Egido, A.; Caparrini, M.; Ruffini, G.; Paloscia, S.; Santi, E.; Guerriero, L.; Pierdicca, N.; Floury, N. Global navigation satellite systems reflectometry as a remote sensing tool for agriculture. Remote Sens. 2012, 4, 2356–2372. [Google Scholar] [CrossRef]
- Paloscia, S.; Santi, E.; Fontanelli, G.; Pettinato, S.; Egido, A.; Caparrini, M.; Motte, E.; Guerriero, L.; Pierdicca, N.; Floury, N. Grass: AN experiment on the capability of airborne GNSS-R sensors in sensing soil moisture and vegetation biomass. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium-IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 2110–2113. [Google Scholar]
- Sánchez, N.; Alonso-Arroyo, A.; Martínez-Fernández, J.; Piles, M.; González-Zamora, A.; Camps, A.; Vall-llosera, M. On the Synergy of Airborne GNSS-R and Landsat 8 for Soil Moisture Estimation. Remote Sens. 2015, 7, 9954–9974. [Google Scholar] [CrossRef] [Green Version]
- Camps, A.; Park, H.; Pablos, M.; Foti, G.; Gommenginger, C.P.; Liu, P.W.; Judge, J. Sensitivity of GNSS-R Spaceborne Observations to Soil Moisture and Vegetation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4730–4742. [Google Scholar] [CrossRef] [Green Version]
- Pei, Y.; Notarpietro, R.; Savi, P.; Cucca, M.; Dovis, F. A fully software Global Navigation Satellite System reflectometry (GNSS-R) receiver for soil monitoring. Int. J. Remote Sens. 2014, 35, 2378–2391. [Google Scholar]
- Jia, Y.; Savi, P. Estimation of Surface Characteristics Using GNSS LH Reflected Signals: Land versus Water. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4752–4758. [Google Scholar] [CrossRef]
- Katzberg, S.J.; Torres, O.; Grant, M.S.; Masters, D. Utilizing calibrated GPS reflected signals to estimate soil reflectivity and dielectric constant: Results from SMEX02. Remote Sens. Environ. 2006, 100, 17–28. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Camps, A.; Vall-llossera, M.; Valencia, E.; Marchan-Hernandez, J.F.; Ramos-Perez, I. Soil moisture retrievals using GNSS-R techniques: Experimental Results over a Bare Soil Field. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3616–3624. [Google Scholar] [CrossRef]
- Jia, Y.; Savi, P. Sensing soil moisture and vegetation using GNSS-R polarimetric measurement. Adv. Space Res. 2017, 59, 858–869. [Google Scholar] [CrossRef]
- Egido, A. GNSS Reflectometry for Land Remote Sensing Applications. Ph.D. Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, July 2013. [Google Scholar]
- Egido, A.; Paloscia, S.; Motte, E.; Guerriero, L.; Pierdicca, N.; Caparrini, M.; Santi, E.; Fontanelli, G.; Floury, N. Airborne GNSS-R Polarimetric Measurements for Soil Moisture and Above-Ground Biomass Estimation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1522–1532. [Google Scholar] [CrossRef]
- Unwin, M.; Blunt, P.; de Vos van Steenwijk, R.; Duncan, S.; Martin, G.; Jales, P. GNSS Remote Sensing and Technology Demonstration on TechDemoSat-1. In Proceedings of the 24th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 20–23 September 2011; pp. 2970–2975. [Google Scholar]
- Chew, C.; Shah, R.; Zuffada, C.; Hajj, G.; Masters, D.; Mannucci, A.J. Demonstrating soil moisture remote sensing with observations from the UK TechDemoSat-1 satellite mission. Geophys. Res. Lett. 2016, 43, 3317–3324. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Lowe, C.; Zuffada, S.; Esterhuizen, S.; Oveisgharan, S. Spaceborne GNSS-R from the SMAP mission: first assessment of polarimetric scatterometry over land and cryosphere. Remote Sens. 2017, 9, 326. [Google Scholar] [CrossRef]
- Motte, E.; Zribi, M.; Fanise, P.; Egido, A.; Darrozes, J.; Al-Yaari, A.; Baghdadi, N.; Baup, F.; Dayau, S.; Fieuzal, R.; et al. GLORI: A GNSS-R Dual Polarization Airborne Instrument for Land Surface Monitoring. Sensors 2016, 16, 732. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lestarquit, L.; Peyrezabes, M.; Darrozes, J.; Motte, E.; Roussel, N.; Wautelet, G.; Frappart, F.; Ramillien, G.; Biancale, R.; Zribi, M. Reflectometry with an open-source Software GNSS receiver. Application Case with Carrier Phase Altimetry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4843–4853. [Google Scholar] [CrossRef]
- Motte, E.; Zribi, M. Optimizing waveform maximum determination for specular point tracking in airborne GNSS-R. Sensors 2017, 17, 1880. [Google Scholar] [CrossRef] [PubMed]
- Gueeriero, L.; Pierdicca, N.; Pulvirenti, L.; Ferrazzoli, P. Use of satellite radar bistatic measurements for crop monitoring: A simulation study on corn field. Remote Sens. 2013, 5, 864–890. [Google Scholar] [CrossRef]
- Pierdicca, N.; Guerriero, L.; Giusto, R.; Brogioni, M.; Egido, A. SAVERS: A Simulator of GNSS Reflections from Bare and Vegetated Soils. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6542–6554. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing: Active and Passive-Volume 1-Microwave Remote Sensing Fundamentals and Radiometry. 1981. Available online: https://fdbktgsmn.updog.co/ZmRia3Rnc21uMDIwMTEwNzU5Nw.pdf (accessed on 6 July 2018).
- Jackson, T.J.; Schmugge, T.J.; Wang, J.R. Passive microwave moisture sensing of soil under vegetation canopies. Water Resour. Res. 1982, 18, 1137–1142. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date (dd/mm/yy) | Soil Moisture (m3/m3) | LAI (m²/m²) | VH (cm) |
|---|---|---|---|
| 22/06/2015 | [0.04–0.23] | [0–5.5] | [0–104] |
| 25/06/2015 | [0.1–0.22] | - | - |
| 29/06/2015 | [0.04–0.24] | [0–6.5] | [0–203] |
| 01/07/2015 | [0.08–0.21] | [0–6.18] | - |
| 06/07/2015 | [0.09–0.23] | [0–6.8] | [0–257] |
| 50–70° | 70–90° | |||||||
|---|---|---|---|---|---|---|---|---|
| LAI < 1 | LAI > 1 | LAI < 1 | LAI > 1 | |||||
| S dB/(m3/m3) | R2 | S dB/(m3/m3) | R2 | S dB/(m3/m3) | R2 | S dB/(m3/m3) | R2 | |
| 40 | 0.62 | 22.2 | 0.08 | 45.7 | 0.54 | 28.4 | 0.14 | |
| SNR | 38.9 | 0.64 | 25.4 | 0.20 | 39 | 0.41 | 24.1 | 0.10 |
| PR | 30 | 0.17 | 44 | 0.20 | 14.4 | 0.10 | −3.5 | 0.01 |
| 50–70° | 70–90° | |||
|---|---|---|---|---|
| Sv (dB/(m2/m2)) | R2 | Sv (dB/(m2/m2)) | R2 | |
| −0.91 | 0.38 | −23 | 0.03 | |
| SNR | −0.76 | 0.34 | −0.17 | 0.01 |
| PR | −1.1 | 0.30 | −1.18 | 0.36 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zribi, M.; Motte, E.; Baghdadi, N.; Baup, F.; Dayau, S.; Fanise, P.; Guyon, D.; Huc, M.; Wigneron, J.P. Potential Applications of GNSS-R Observations over Agricultural Areas: Results from the GLORI Airborne Campaign. Remote Sens. 2018, 10, 1245. https://doi.org/10.3390/rs10081245
Zribi M, Motte E, Baghdadi N, Baup F, Dayau S, Fanise P, Guyon D, Huc M, Wigneron JP. Potential Applications of GNSS-R Observations over Agricultural Areas: Results from the GLORI Airborne Campaign. Remote Sensing. 2018; 10(8):1245. https://doi.org/10.3390/rs10081245
Chicago/Turabian StyleZribi, Mehrez, Erwan Motte, Nicolas Baghdadi, Frédéric Baup, Sylvia Dayau, Pascal Fanise, Dominique Guyon, Mireille Huc, and Jean Pierre Wigneron. 2018. "Potential Applications of GNSS-R Observations over Agricultural Areas: Results from the GLORI Airborne Campaign" Remote Sensing 10, no. 8: 1245. https://doi.org/10.3390/rs10081245