Evaluating Unmanned Aerial Vehicle Images for Estimating Forest Canopy Fuels in a Ponderosa Pine Stand


Abstract
:
1. Introduction
- Estimate the following stand-level variables from the UAV data in 10 m cells for fire behavior modeling: total canopy cover (%), tree density (total no./cell), mean canopy height (m), mean canopy base height (m), mean canopy bulk density (kg/m3), topographic elevation (m), slope (degrees), and aspect (azimuth).
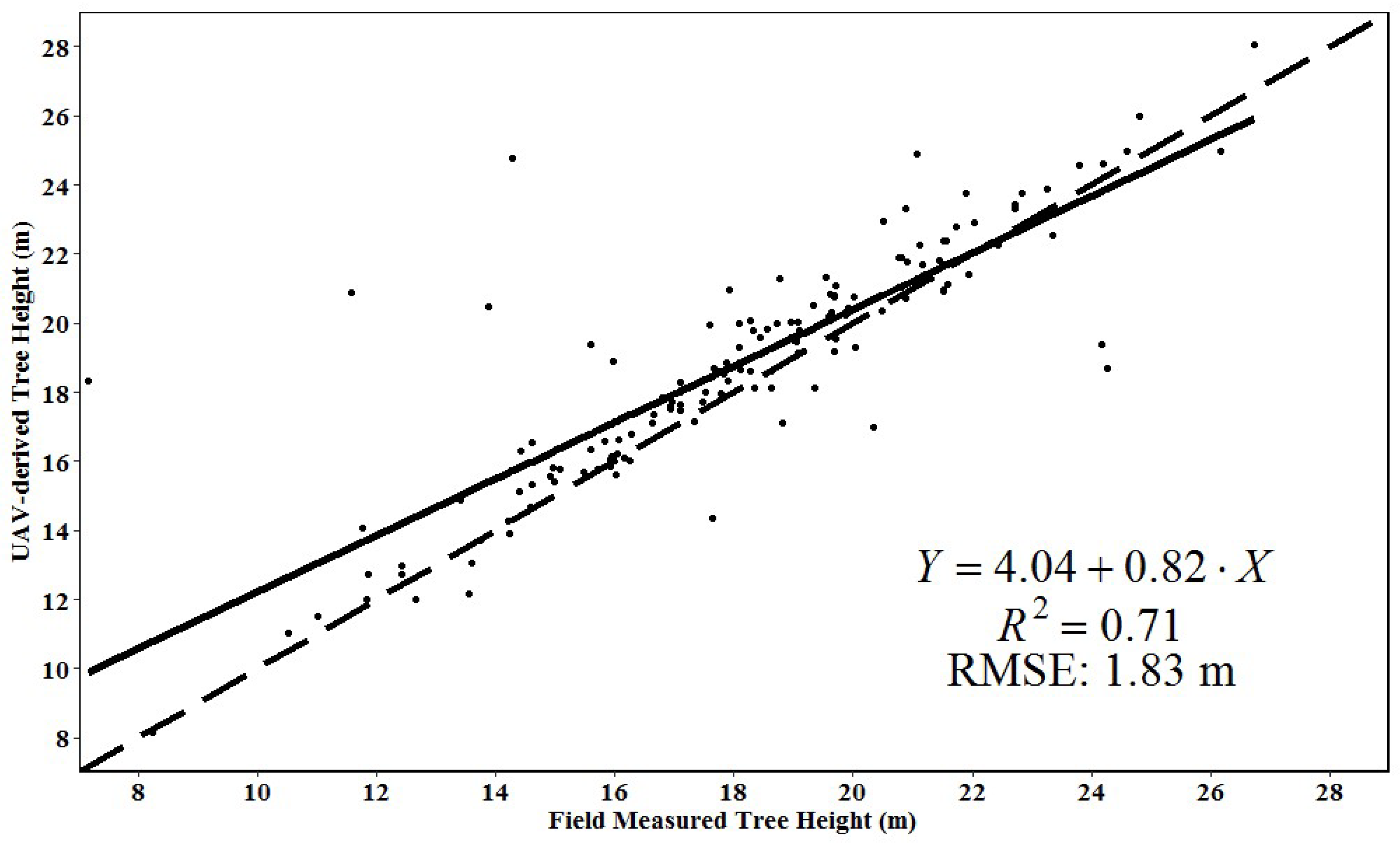
- Test and quantify the errors associated with UAV SfM-derived point cloud data in delineating individual trees and estimating for each individual tree: total height, canopy base height, and canopy bulk density.
2. Materials and Methods
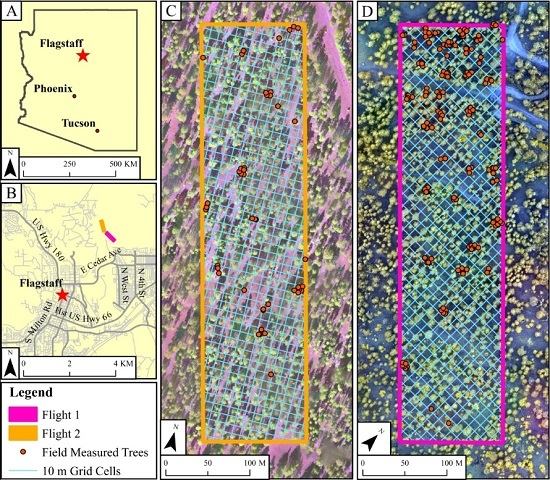
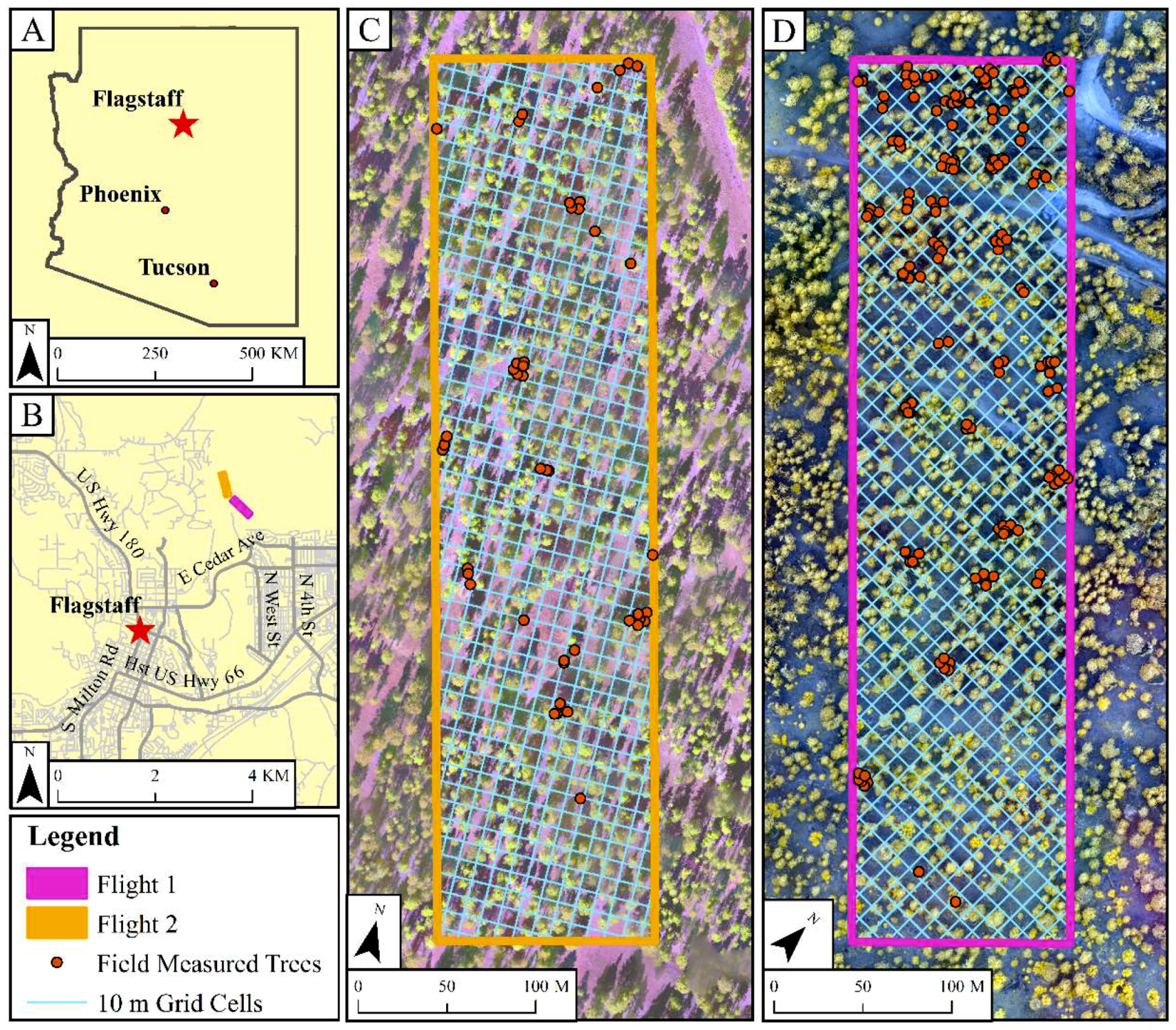
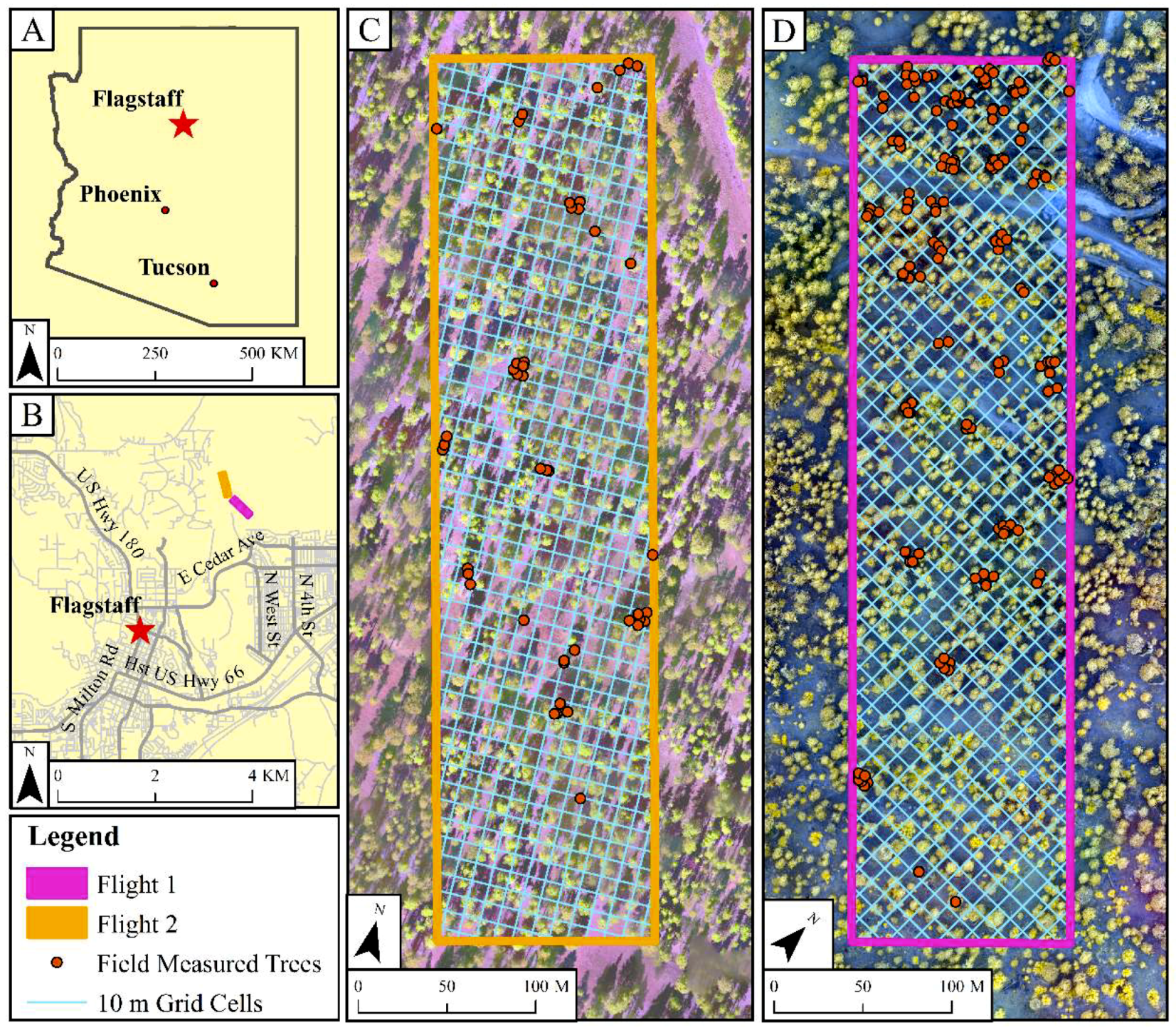
2.1. Study Area
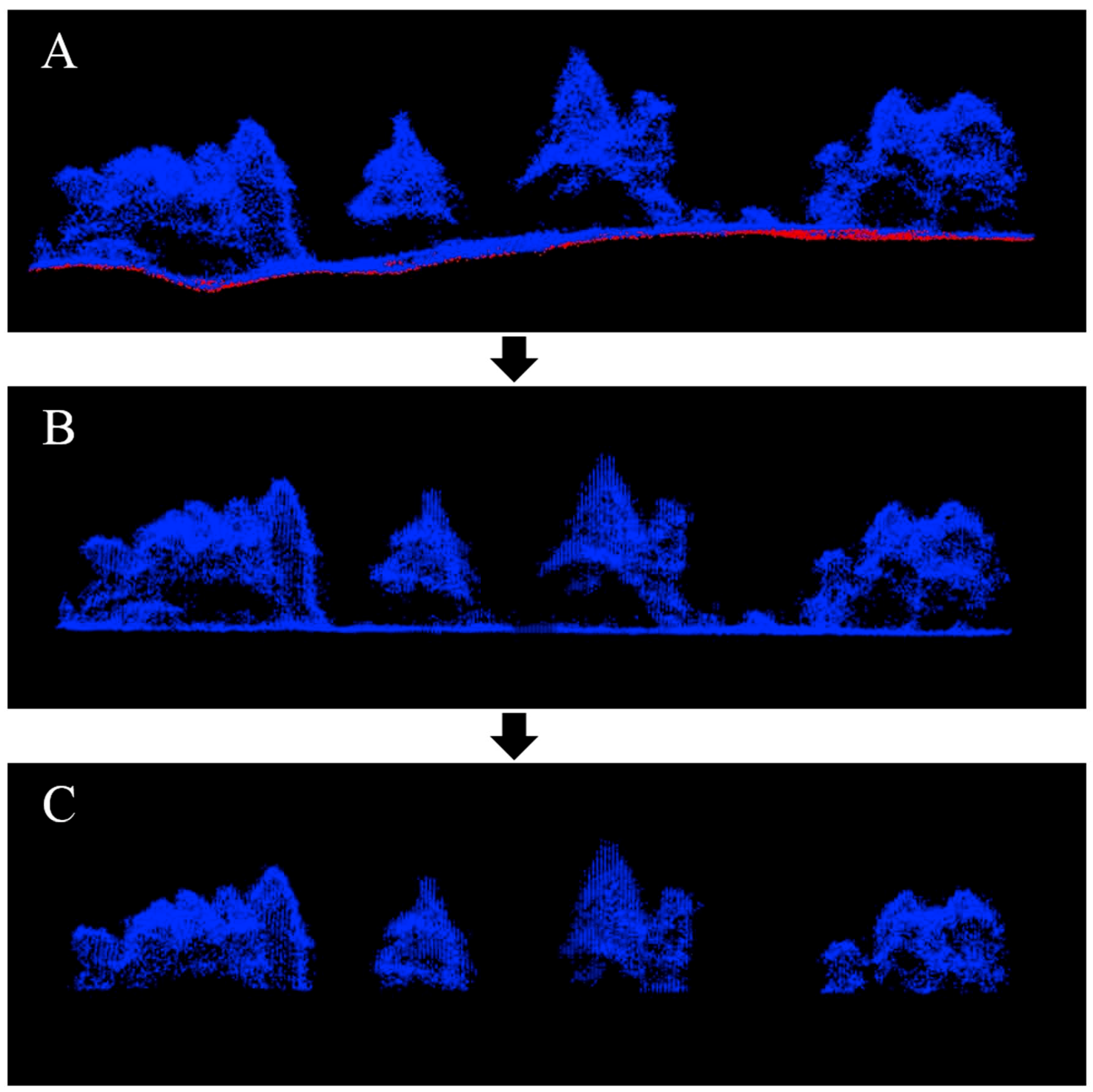
2.2. UAV Images and Pre-Processing
2.3. UAV Image-Derived Canopy Cover
2.4. UAV Image-Derived Individual Tree Segmentation
2.5. UAV Image-Derived Individual Tree Metrics
2.6. Field Validation
2.7. Fire Behavior Modeling
3. Results
3.1. Forest Stand-Level Metrics
3.2. Individual Tree Metrics
3.3. Fire Behavior Modeling
4. Discussion
4.1. UAV Images and Forest Canopy Cover Estimates
4.2. Individual Tree Segmentation and Subsequent Density Estimates
4.3. Individual Tree Metrics
4.4. Using UAV Data for Modeling Fire Behavior
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Cooper, C.F. Changes in vegetation, structure, and growth of southwestern pine forests since white settlement. Ecol. Monogr. 1960, 30, 129–164. [Google Scholar] [CrossRef]
- Allred, S. Ponderosa; Big Pine of the Southwest, 2nd ed.; University of Arizona Press: Tucson, AZ, USA, 2015. [Google Scholar]
- Covington, W.W.; Moore, M.M. Postsettlement changes in natural fire regimes and forest structure: Ecological restoration of old-growth ponderosa pine forests. J. Sustain. For. 1994, 2, 153–181. [Google Scholar] [CrossRef]
- Savage, M.; Brown, P.M.; Feddema, J. The role of climate in a pine forest regeneration pulse in the southwestern United States. Ecoscience 1996, 3, 310–318. [Google Scholar] [CrossRef]
- Moore, M.M.; Huffman, D.W.; Fule, P.Z.; Covington, W.W.; Crouse, J.E. Comparison of historical and contemporary forest structure and composition on permanent plots in southwestern ponderosa pine forests. For. Sci. 2004, 50, 162–176. [Google Scholar]
- Covington, W.W.; Moore, M.M. Southwestern Ponderosa Forest Structure—Changes since Euro-American Settlement. J. For. 1994, 92, 39–47. [Google Scholar]
- Covington, W.W.; Fule, P.Z.; Moore, M.M.; Hart, S.C.; Kolb, T.E.; Mast, J.N. Restoring ecosystem health in ponderosa pine forests of the Southwest. J. For. 1997, 95, 23–29. [Google Scholar]
- Fitzgerald, S.A. Fire Ecology of Ponderosa Pine and the Rebuilding of Fire-Resilient Ponderosa Pine Ecosystems; General Technical Report PSW-GTR-198; U.S. Department of Agriculture, Forest Service, Pacific Southwest Research Station: Albany, CA, USA, 2005.
- Westerling, A.L.; Hidalgo, H.G.; Cayan, D.R.; Swetnam, T.W. Warming and earlier spring increase western US forest wildfire activity. Science 2006, 313, 940–943. [Google Scholar] [CrossRef] [PubMed]
- Miller, J.D.; Safford, H.D.; Crimmins, M.; Thode, A.E. Quantitative evidence for increasing forest fire severity in the Sierra Nevada and southern Cascade Mountains, California and Nevada, USA. Ecosystems 2009, 12, 16–32. [Google Scholar] [CrossRef]
- Stephens, S.L.; Agee, J.K.; Fule, P.Z.; North, M.P.; Romme, W.H.; Swetnam, T.W.; Turner, M.G. Managing forests and fire in changing climates. Science 2013, 342, 41–42. [Google Scholar] [CrossRef] [PubMed]
- Graham, R.T.; McCaffrey, S.; Jain, T.B. Science Basis for Changing Forest Structure to Modify Wildfire Behavior and Severity; General Technical Report RMRS-GTR-120; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2004.
- Agee, J.K.; Skinner, C.N. Basic principles of forest fuel reduction treatments. For. Ecol. Manag. 2005, 211, 83–96. [Google Scholar] [CrossRef] [Green Version]
- Larson, A.J.; Churchill, D. Tree spatial patterns in fire-frequent forests of western North America, including mechanisms of pattern formation and implications for designing fuel reduction and restoration treatments. For. Ecol. Manag. 2012, 267, 74–92. [Google Scholar] [CrossRef]
- Reynolds, R.T.; Meador, A.J.S.; Youtz, J.A.; Nicolet, T.; Matonis, M.S.; Jackson, P.L.; DeLorenzo, D.G.; Graves, A.D. Restoring Composition and Structure in Southwestern Frequent-Fire Forests: A Science-Based Framework for Improving Ecosystem Resiliency; General Technical Report RMRS-GTR-310; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2013.
- Landres, P.B.; Morgan, P.; Swanson, F.J. Overview of the use of natural variability concepts in managing ecological systems. Ecol. Appl. 1999, 9, 1179–1188. [Google Scholar]
- Mast, J.N.; Fule, P.Z.; Moore, M.M.; Covington, W.W.; Waltz, A.E. Restoration of presettlement age structure of an Arizona ponderosa pine forest. Ecol. Appl. 1999, 9, 228–239. [Google Scholar] [CrossRef]
- Kolb, T.E.; Holmberg, K.M.; Wagner, M.R.; Stone, J.E. Regulation of ponderosa pine foliar physiology and insect resistance mechanisms by basal area treatments. Tree Physiol. 1998, 18, 375–381. [Google Scholar] [CrossRef] [PubMed]
- Covington, W.W.; Fule, P.Z.; Hart, S.C.; Weaver, R.P. Modeling ecological restoration effects on ponderosa pine forest structure. Restor. Ecol. 2001, 9, 421–431. [Google Scholar] [CrossRef]
- Van Mantgem, P.J.; Stephenson, N.L.; Byrne, J.C.; Daniels, L.D.; Franklin, J.F.; Fule, P.Z.; Harmon, M.E.; Larson, A.J.; Smith, J.M.; Taylor, A.H.; et al. Widespread increase of tree mortality rates in the western United States. Science 2009, 323, 521–524. [Google Scholar] [CrossRef] [PubMed]
- Stoddard, M.T.; Meador, A.S.; Fule, P.Z.; Korb, J.E. Five-year post-restoration conditions and simulated climate-change trajectories in a warm/dry mixed-conifer forest, southwestern Colorado, USA. For. Ecol. Manag. 2015, 356, 253–261. [Google Scholar] [CrossRef]
- Stratton, R.D. Assessing the effectiveness of landscape fuel treatments on fire growth and behavior. J. For. 2004, 102, 32–40. [Google Scholar]
- Reeves, M.C.; Kost, J.R.; Ryan, K.C. Fuel Products of the LANDFIRE Project. In Proceedings of the RMRS-P-41, Portland, OR, USA, 28–30 March 2006; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2006. [Google Scholar]
- Stratton, R.D. Guidebook on LANDFIRE Fuels Data Acquisition, Critique, Modification, Maintenance, and Model Calibration; General Technical Report RMRS-GTR-220; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2009.
- Rollins, M.G. LANDFIRE: A nationally consistent vegetation, wildland fire, and fuel assessment. Int. J. Wildland Fire 2009, 18, 235–249. [Google Scholar] [CrossRef]
- Reeves, M.C.; Ryan, K.C.; Rollins, M.G.; Thompson, T.G. Spatial fuel data products of the LANDFIRE Project. Int. J. Wildland Fire 2009, 18, 250–267. [Google Scholar] [CrossRef]
- Dunford, R.; Michel, K.; Gagnage, M.; Piegay, H.; Tremelo, M. Potential and constraints of unmanned aerial vehicle technology for the characterization of Mediterranean riparian forest. Int. J. Remote Sens. 2009, 30, 4915–4935. [Google Scholar] [CrossRef]
- Saari, H.; Pellikka, I.; Pesonen, L.; Tuominen, S.; Heikkila, J.; Holmlund, C.; Makynen, J.; Ojala, K.; Antila, T. Unmanned aerial vehicle (UAV) operated spectral camera system for forest and agriculture applications. Proc. SPIE 2011, 81740H. [Google Scholar] [CrossRef]
- Getzin, S.; Wiegand, K.; Schoning, I. Assessing biodiversity in forests using very high-resolution images and unmanned aerial vehicles. Methods Ecol. Evol. 2012, 3, 397–404. [Google Scholar] [CrossRef]
- Sankey, T.; Donald, J.; McVay, J.; Sankey, J. UAV lidar and hyperspectral fusion for forest monitoring in the southwestern USA. Remote Sens. Environ. 2017, 195, 30–43. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Dandois, J.P.; Ellis, E.C. High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision. Remote Sens. Environ. 2013, 136, 259–276. [Google Scholar] [CrossRef]
- Hummel, S.; Hudak, A.T.; Uebler, E.H.; Falkowski, M.J.; Megown, K.A. A comparison of accuracy and cost of LiDAR versus stand exam data for landscape management on the Malheur National Forest. J. For. 2011, 109, 267–273. [Google Scholar]
- Puliti, S.; Orka, H.O.; Gobakken, T.; Nasset, E. Inventory of small forest areas using an unmanned aerial system. Remote Sens. 2015, 7, 9632–9654. [Google Scholar] [CrossRef] [Green Version]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal altitude, overlap, and weather conditions for computer vision UAV estimates of forest structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovsky, Z.; Turner, D.; Vopenka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Goldbergs, G.; Maier, S.W.; Levick, S.R.; Edwards, A. Efficiency of individual tree detection approaches based on light-weight and low-cost UAS imagery in Australian savannas. Remote Sens. 2018, 10, 161. [Google Scholar] [CrossRef]
- National Oceanic and Atmospheric Administration. Data Tools: 1981–2010 Normals. Available online: https://www.ncdc.noaa.gov/cdo-web/datatools/normals (accessed on 21 November 2017).
- SenseFly. eBee SenseFly. Available online: https://www.sensefly.com/fileadmin/user_upload/sensefly/documents/brochures/eBee_en.pdf (accessed on 1 February 2017).
- SenseFly. eMotion 2. Available online: https://www.sensefly.com/software/emotion-2/ (accessed on 1 February 2017).
- Zhang, K.; Chen, S.C.; Whitman, D.; Shyu, M.L.; Yan, J.; Zhang, C. A progressive morphological filter for removing nonground measurements from airborne LIDAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 872–882. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A new method for segmenting individual trees from the lidar point cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- Wallace, L.; Musk, R.; Lucieer, A. An assessment of the repeatability of automatic forest inventory metrics derived from UAV-borne laser scanning data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7160–7169. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.S. Evaluating tree detection and segmentation routines on very high resolution UAV LiDAR data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7619–7628. [Google Scholar] [CrossRef]
- Iizuka, K.; Yonehara, T.; Itoh, M.; Kosugi, Y. Estimating tree height and diameter at breast height (DBH) from digital surface models and orthophotos obtained with an unmanned aerial system for a Japanese cypress (Chamaecyparis obtusa) forest. Remote Sens. 2018, 10, 13. [Google Scholar] [CrossRef]
- Goutte, C.; Gaussier, E. A probabilistic interpretation of precision, recall and F-score, with implication for evaluation. Advances in Information Retrieval. Lect. Notes Comput. Sci. 2005, 3408, 345–359. [Google Scholar]
- Kaye, J.P.; Hart, S.C.; Fule, F.Z.; Covington, W.W.; Moore, M.W.; Kaye, M.W. Initial carbon, nitrogen, and phosphorous fluxes following ponderosa pine restoration treatments. Ecol. Appl. 2005, 15, 1581–1593. [Google Scholar] [CrossRef]
- Finney, M.A. An Overview of FlamMap Fire Modeling Capabilities. In Proceedings of the RMRS-P-41, Portland, OR, USA, 28–30 March 2006; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2006. [Google Scholar]
- Cruz, M.G.; Alexander, M.E.; Wakimoto, R.H. Predicting crown fire behavior to support forest fire management decision-making. In Proceedings of the Fourth International Conference on Forest Fire Research/Wildland Fire Safety Summit, Coimbra, Portugal, 18–23 November 2002. [Google Scholar]
- Scott, J.H. Comparison of Crown Fire Modeling Systems Used in Three Fire Management Applications; Research Paper RMRS-RP-58; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2006.
- Wagner, C.V. Conditions for the start and spread of crown fire. Can. J. For. Res. 1977, 7, 23–34. [Google Scholar] [CrossRef]
- Scott, J.H.; Reinhardt, E.D. Assessing Crown Fire Potential by Linking Models of Surface and Crown Fire Behavior; Research Paper RMRS-RP-29; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2001.
- Keane, R.E.; Reinhardt, E.D.; Scott, J.; Gray, K.; Reardon, J. Estimating forest canopy bulk density using six indirect methods. Can. J. For. Res. 2005, 35, 724–739. [Google Scholar] [CrossRef] [Green Version]
- Anderson, H.E. Aids to Determining Fuel Models for Estimating Fire Behavior; General Technical Report GTR-INT-122; U.S. Department of Agriculture, Forest Service, Intermountain Forest and Range Experiment Station: Ogden, UT, USA, 1982.
- Scott, J.H.; Burgan, R.E. Standard Fire Behavior Fuel Models: A Comprehensive Set for Use with Rothermel’s Surface Fire Spread Mode; General Technical Report RMRS-GTR-153; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2005.
- Rothermel, R.C. A Mathematical Model for Predicting Fire Spread in Wildland Fuels; Research Paper INT-115, U.S. Department of Agriculture, Forest Service, Intermountain Forest and Range Experiment Station: Ogden, UT, USA, 1972. [Google Scholar]
- Thornton, P.E.; Running, S.W.; White, M.A. Generating surfaces of daily meteorological variables over large regions of complex terrain. J. Hydrol. 1997, 190, 214–251. [Google Scholar] [CrossRef] [Green Version]
- Homer, C.; Huang, C.Q.; Yang, L.M.; Wylie, B.; Coan, M. Development of a 2001 National Land-Cover Database for the United States. Photogramm. Eng. Remote Sens. 2004, 70, 829–840. [Google Scholar] [CrossRef]
- Keane, R.E.; Holsinger, L.M.; Pratt, S.D. Simulating Historical Landscape Dynamics Using the Landscape Fire Succession Model LANDSUM Version 4.0; General Technical Report RMRS-GTR-171; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2006.
- Zhu, Z.; Vogelmann, J.; Ohlen, D.; Kost, J.; Chen, X.; Tolk, B. Mapping Existing Vegetation Composition and Structure for the LANDFIRE Prototype Project; General Technical Report RMRS-GTR-175; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2006.
- United States Geological Survey. Elevation derivatives for national applications. Available online: http://edna.usgs.gov/ (accessed on 1 March 2017).
- Woodcock, C.E.; Strahler, A.H. The factor of scale in remote sensing. Remote Sens. Environ. 1987, 21, 311–332. [Google Scholar] [CrossRef]
- Fule, P.Z.; Crouse, J.E.; Cocke, A.E.; Moore, M.M.; Covington, W.W. Changes in canopy fuels and potential fire behavior 1880–2040: Grand Canyon, Arizona. Ecol. Model. 2004, 175, 231–248. [Google Scholar] [CrossRef]
- Lydersen, J.M.; North, M.P.; Knapp, E.E.; Collins, B.M. Quantifying spatial patterns of tree groups and gaps in mixed-conifer forests: Reference conditions and long-term changes following fire suppression and logging. For. Ecol. Manag. 2013, 304, 370–382. [Google Scholar] [CrossRef]
- Feeney, S.R.; Kolb, T.E.; Covington, W.W.; Wagner, M.R. Influence of thinning and burning restoration treatments on presettlement ponderosa pines at the Gus Pearson Natural Area. Can. J. For. Res. 1998, 28, 1295–1306. [Google Scholar] [CrossRef]
- Ganey, J.L.; Block, W.M.; Jenness, J.S.; Wilson, R.A. Mexican spotted owl home range and habitat use in pine-oak forest: Implications for forest management. For. Sci. 1999, 45, 127–135. [Google Scholar]
- Prather, J.W.; Noss, R.F.; Sisk, T.D. Real versus perceived conflicts between restoration of ponderosa pine forests and conservation of the Mexican spotted owl. For. Policy Econ. 2008, 10, 140–150. [Google Scholar] [CrossRef]
- Kaye, J.P.; Hart, S.C.; Cobb, R.C.; Stone, J.E. Water and nutrient outflow following the ecological restoration of a ponderosa pine-bunchgrass ecosystem. Restor. Ecol. 2002, 7, 252–261. [Google Scholar] [CrossRef]
- Simonin, K.; Kolb, T.E.; Montes-Helu, M.; Koch, G.W. The influence of thinning on components of stand water balance in a ponderosa pine forest stand during and after extreme drought. Agric. For. Meteorol. 2007, 143, 266–276. [Google Scholar] [CrossRef]
- Jameson, D.A. The relationship of tree overstory and herbaceous understory vegetation. J. Range Manag. 1967, 20, 247–249. [Google Scholar] [CrossRef]
- Laughlin, D.C.; Moore, M.M.; Bakker, J.D.; Casey, C.A.; Springer, J.D.; Fule, P.Z.; Covington, W.W. Assessing targets for the restoration of herbaceous vegetation in ponderosa pine forests. Restor. Ecol. 2006, 14, 548–560. [Google Scholar] [CrossRef]
- Moore, M.M.; Casey, C.A.; Bakker, J.D.; Springer, J.D.; Fule, P.Z.; Covington, W.W.; Laughlin, D.C. Herbaceous vegetation responses (1992–2004) to restoration treatments in a ponderosa pine forest. Rangel. Ecol. Manag. 2006, 59, 135–144. [Google Scholar] [CrossRef]
- Mohan, M.; Silva, C.A.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.T.; Mahendra, D. Individual tree detection from unmanned aerial vehicle (UAV) derived canopy height model in an open canopy mixed conifer forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef]
- Andersen, H.E.; McGaughey, R.J.; Reutebuch, S.E. Estimating forest canopy fuel parameters using LIDAR data. Remote Sens. Environ. 2005, 94, 441–449. [Google Scholar] [CrossRef]
- Erdody, T.L.; Moskal, L.M. Fusion of LiDAR and imagery for estimating forest canopy fuels. Remote Sens. Environ. 2010, 114, 725–737. [Google Scholar] [CrossRef]
- Popescu, S.C.; Zhao, K. A voxel-based lidar method for estimating crown base height for deciduous and pine trees. Remote Sens. Environ. 2008, 112, 767–781. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tree Density (trees/cell) | Sampling Goal (cells) | Actual Measured (cells) |
|---|---|---|
| 1 | 10 | 12 |
| 2 | 10 | 10 |
| 3 | 10 | 10 |
| 4 | 10 | 10 |
| 5 | 5 | 5 |
| 6 | 5 | 5 |
| 7 | 5 | 5 |
| Total | 55 | 57 |
| Input Raster | Data Source for Each Iteration | ||||||
|---|---|---|---|---|---|---|---|
| Iteration 1 | Iteration 2 | Iteration 3 | Iteration 4 | Iteration 5 | Iteration 6 | Iteration 7 | |
| Elevation | LF | LF | UAV | LF | LF | LF | UAV |
| Slope | LF | LF | UAV | LF | LF | LF | UAV |
| Aspect | LF | LF | UAV | LF | LF | LF | UAV |
| Canopy Cover | LF | LF | LF | UAV | LF | LF | UAV |
| Canopy Height | LF | LF | LF | LF | UAV | LF | UAV |
| Canopy Base Height | LF | LF | LF | LF | LF | UAV | UAV |
| Canopy Bulk Density | LF | LF | LF | LF | LF | LF | LF |
| Fuel Model | LF | LF | LF | LF | LF | LF | LF |
| DT Value | Detected Trees (%) | Omitted Trees (%) | Commission Error (%) | r | p | F |
|---|---|---|---|---|---|---|
| 1 | 83 | 17 | 69 | 0.83 | 0.55 | 0.66 |
| 1.1 | 79 | 21 | 38 | 0.79 | 0.68 | 0.73 |
| 1.2 | 77 | 23 | 32 | 0.77 | 0.71 | 0.74 |
| 1.3 | 76 | 24 | 21 | 0.76 | 0.78 | 0.77 |
| 1.4 | 73 | 27 | 15 | 0.73 | 0.83 | 0.78 |
| 1.5 | 71 | 29 | 14 | 0.71 | 0.84 | 0.77 |
| 1.6 | 69 | 31 | 11 | 0.69 | 0.86 | 0.77 |
| 1.7 | 68 | 32 | 7 | 0.68 | 0.9 | 0.78 |
| 1.8 | 66 | 34 | 7 | 0.66 | 0.91 | 0.77 |
| 1.9 | 66 | 34 | 7 | 0.66 | 0.91 | 0.76 |
| 2 | 61 | 39 | 6 | 0.61 | 0.91 | 0.73 |
| 2.1 | 59 | 41 | 5 | 0.59 | 0.93 | 0.72 |
| 2.2 | 61 | 39 | 3 | 0.61 | 0.96 | 0.75 |
| 2.3 | 56 | 44 | 5 | 0.56 | 0.92 | 0.7 |
| 2.4 | 57 | 43 | 5 | 0.57 | 0.92 | 0.71 |
| 2.5 | 57 | 43 | 4 | 0.57 | 0.93 | 0.71 |
| Optimized (1.4/1.7) | 74 | 26 | 16 | 0.74 | 0.83 | 0.78 |
| Metric | R2 | p-Value | RMSE | Mean Percent Error | Range of Percent Error |
|---|---|---|---|---|---|
| Tree Height | 0.71 | 2.20x10−16 | 1.83 m | 5.29% | 2.79–8.32% |
| Base Height | 0.34 | 2.65x10−14 | 2.52 m | 32.29% | 22.03%–45.54% |
| Bulk Density | 0.0005 | 0.31 | 0.30 kg/m3 | NA | NA |
| Percent of Fire Type (%) | ||||||
|---|---|---|---|---|---|---|
| Iterations 1 and 2 | Iteration 3 | Iteration 4 | Iteration 5 | Iteration 6 | Iteration 7 | |
| Fire Type | LANDFIRE | UAV Topo | UAV CC | UAV CH | UAV CBH | UAV All |
| Surface | 0 | 0 | 3 | 49 | 98 | 100 |
| Passive Crown | 14 | 23 | 13 | 7 | 0 | 0 |
| Active Crown | 86 | 77 | 84 | 44 | 2 | 0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, P.; Sankey, T.; Moore, M.M.; Thode, A.E. Evaluating Unmanned Aerial Vehicle Images for Estimating Forest Canopy Fuels in a Ponderosa Pine Stand. Remote Sens. 2018, 10, 1266. https://doi.org/10.3390/rs10081266
Shin P, Sankey T, Moore MM, Thode AE. Evaluating Unmanned Aerial Vehicle Images for Estimating Forest Canopy Fuels in a Ponderosa Pine Stand. Remote Sensing. 2018; 10(8):1266. https://doi.org/10.3390/rs10081266
Chicago/Turabian StyleShin, Patrick, Temuulen Sankey, Margaret M. Moore, and Andrea E. Thode. 2018. "Evaluating Unmanned Aerial Vehicle Images for Estimating Forest Canopy Fuels in a Ponderosa Pine Stand" Remote Sensing 10, no. 8: 1266. https://doi.org/10.3390/rs10081266
APA StyleShin, P., Sankey, T., Moore, M. M., & Thode, A. E. (2018). Evaluating Unmanned Aerial Vehicle Images for Estimating Forest Canopy Fuels in a Ponderosa Pine Stand. Remote Sensing, 10(8), 1266. https://doi.org/10.3390/rs10081266