Combining Binary and Post-Classification Change Analysis of Augmented ALOS Backscatter for Identifying Subtle Land Cover Changes

Abstract
:
1. Introduction
2. Iteratively Reweighted Multivariate Alteration Detection and Data Amendment of Synthetic Aperture Radar for Classification
2.1. Multivariate Alteration Detection (MAD) and The Iteratively Reweighted Multivariate Alteration Detection
2.2. The Amendment of Synthetic Aperture Radar Data with Synthetic Layers for Improving Classification Accuracy
2.3. Pixel-Based Techniques for Land Cover Classification
3. Materials and Methods
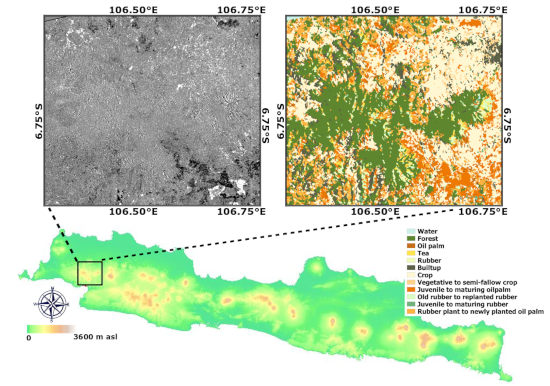
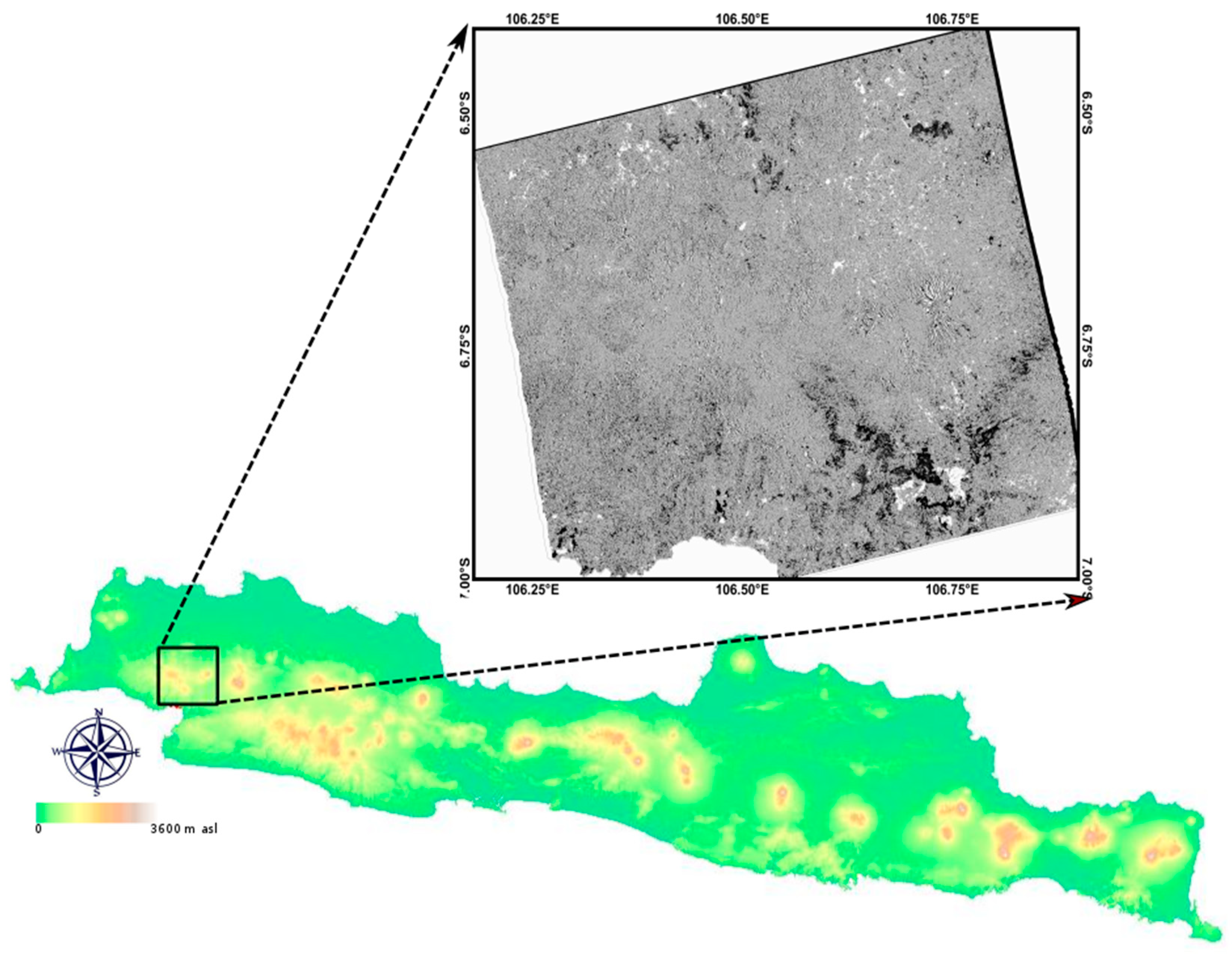
3.1. Site
3.2. Datasets
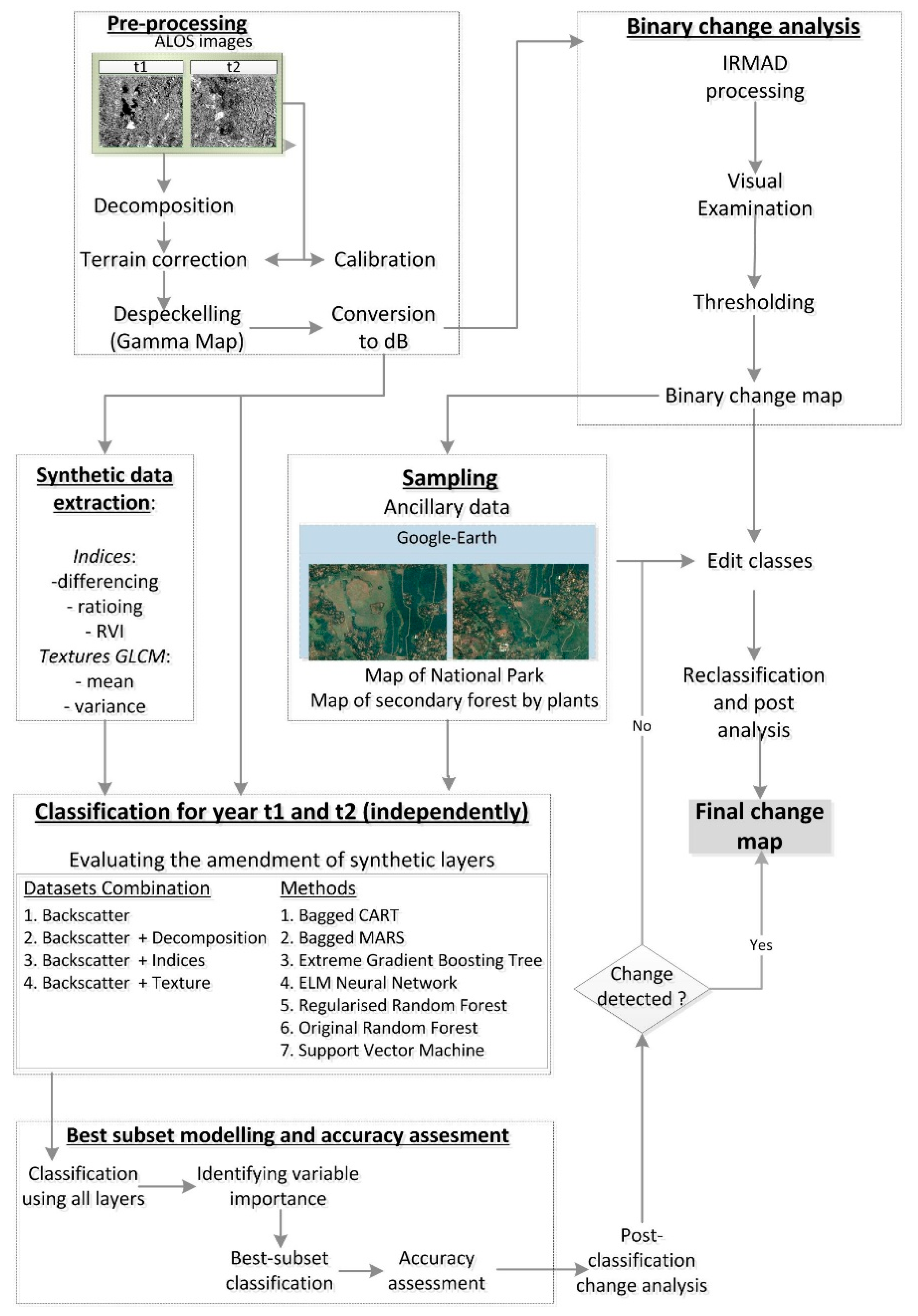
3.3. Procedure
3.3.1. Preparing Synthetic Aperture Radar datasets
3.3.2. An Iteratively Reweighted Multivariate Alteration Detection and Thresholding to Determine Change and Unchanged
3.3.3. The Assessment of Synthetic Data Amendment of Dual Polarisation Synthetic Aperture Radar for Land cover Classification
3.3.4. Selecting the Best Model for Post Classification Change Analysis
4. Results
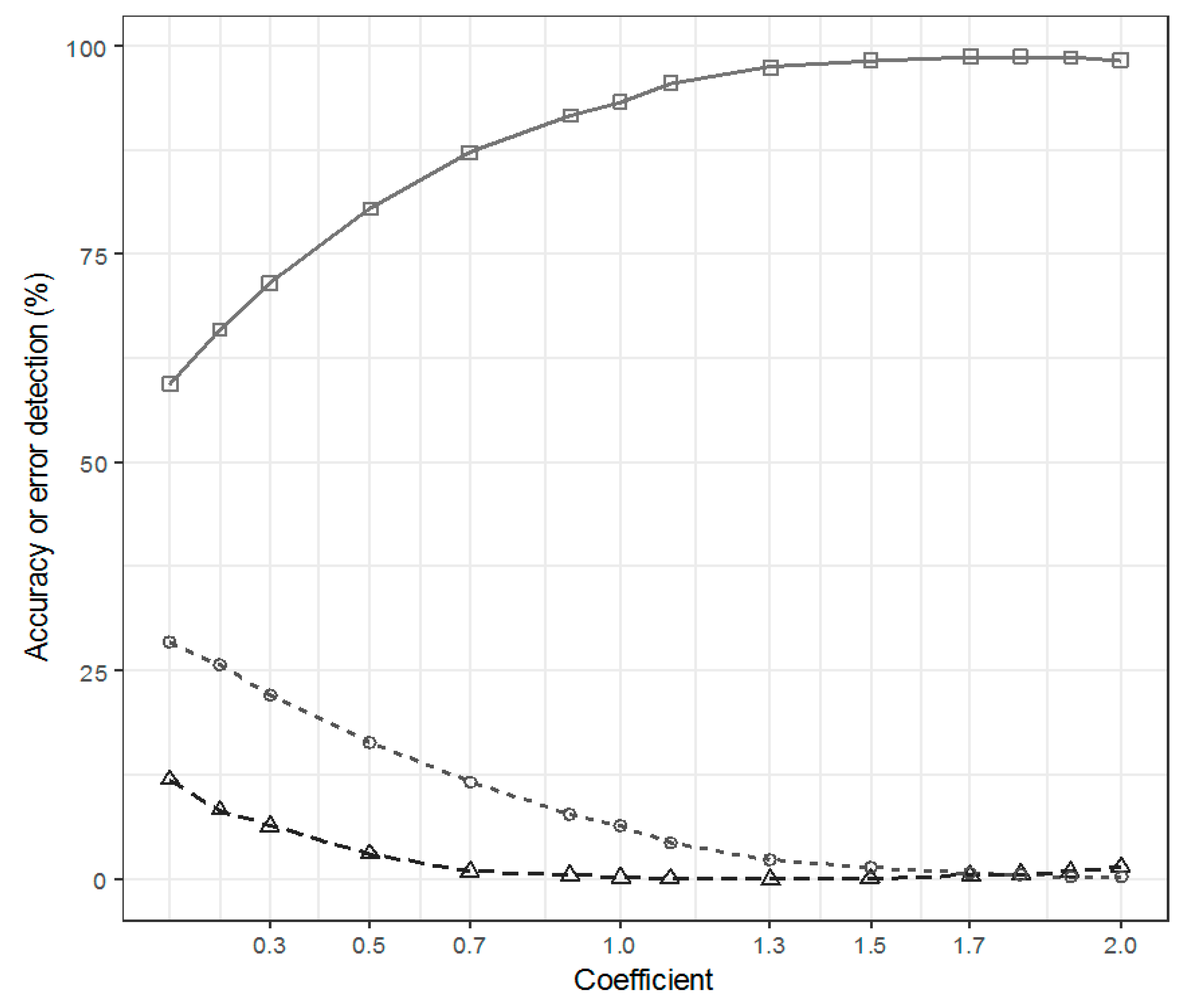
4.1. The Result of Iteratively Reweighted Multivariate Alteration Detection and The Determination of Changed and Unchanged
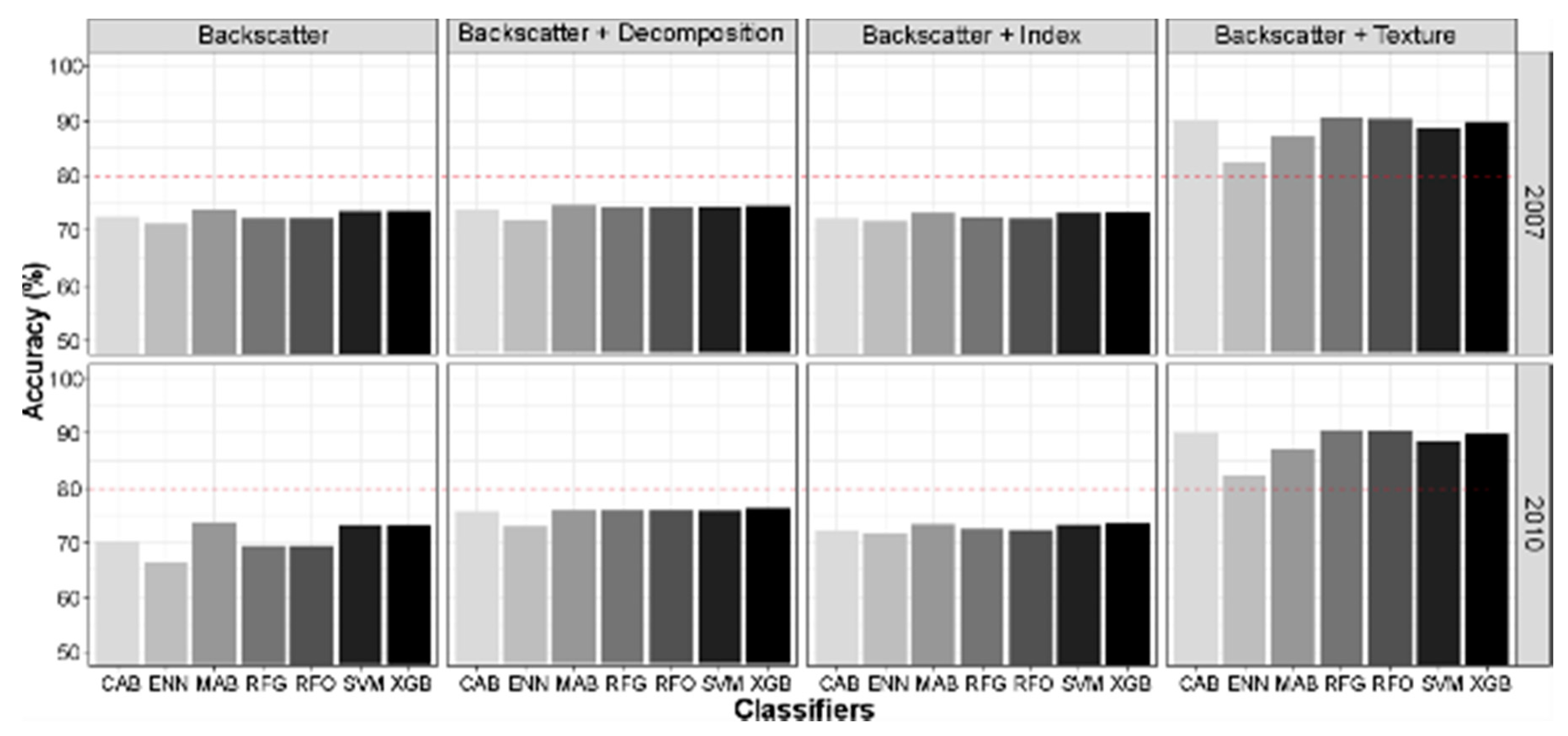
4.2. The Improvement of Classification Accuracy by Synthetic Layers’ Amendment
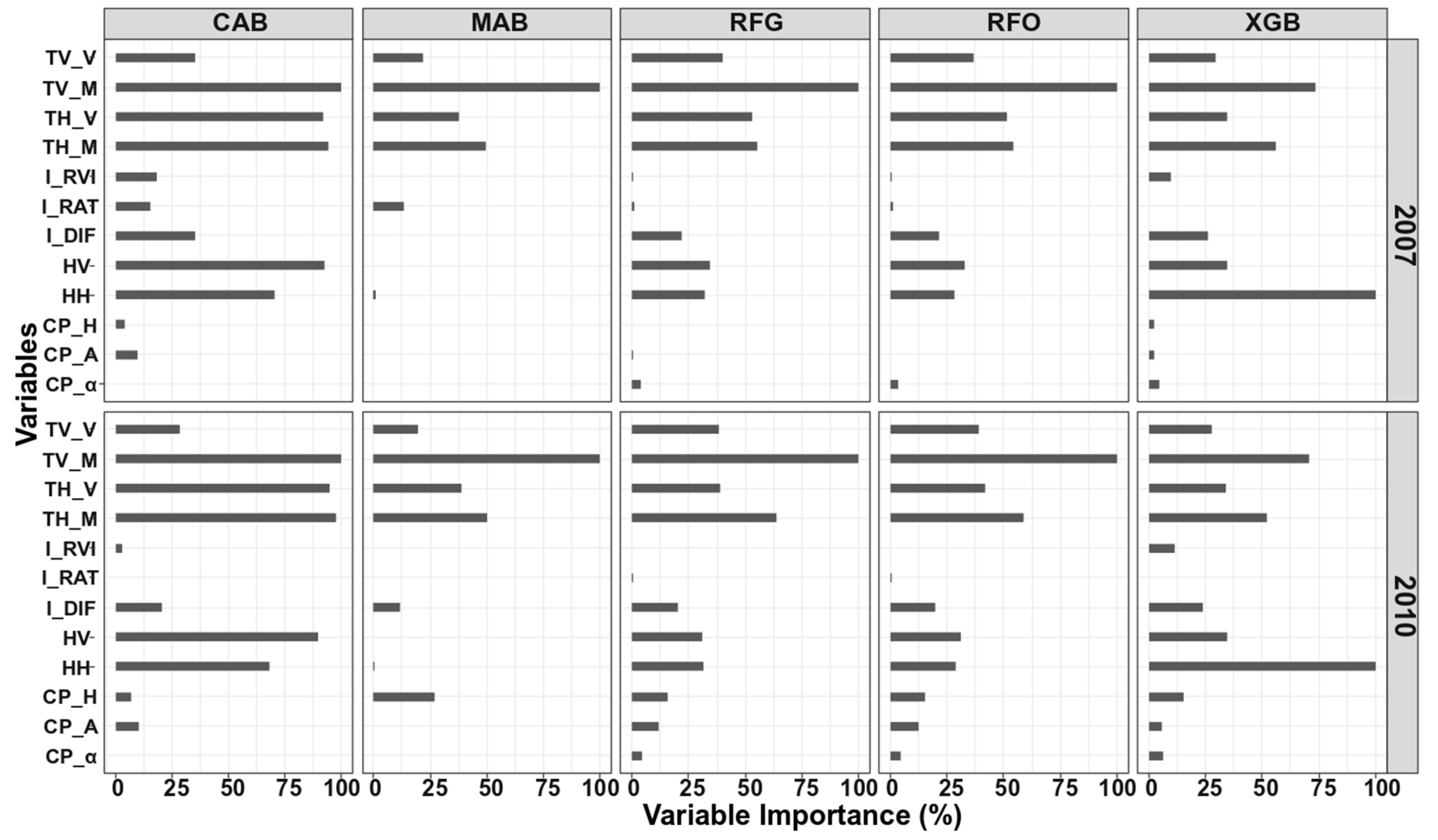
4.3. The Identification of Variable Importance for Classification
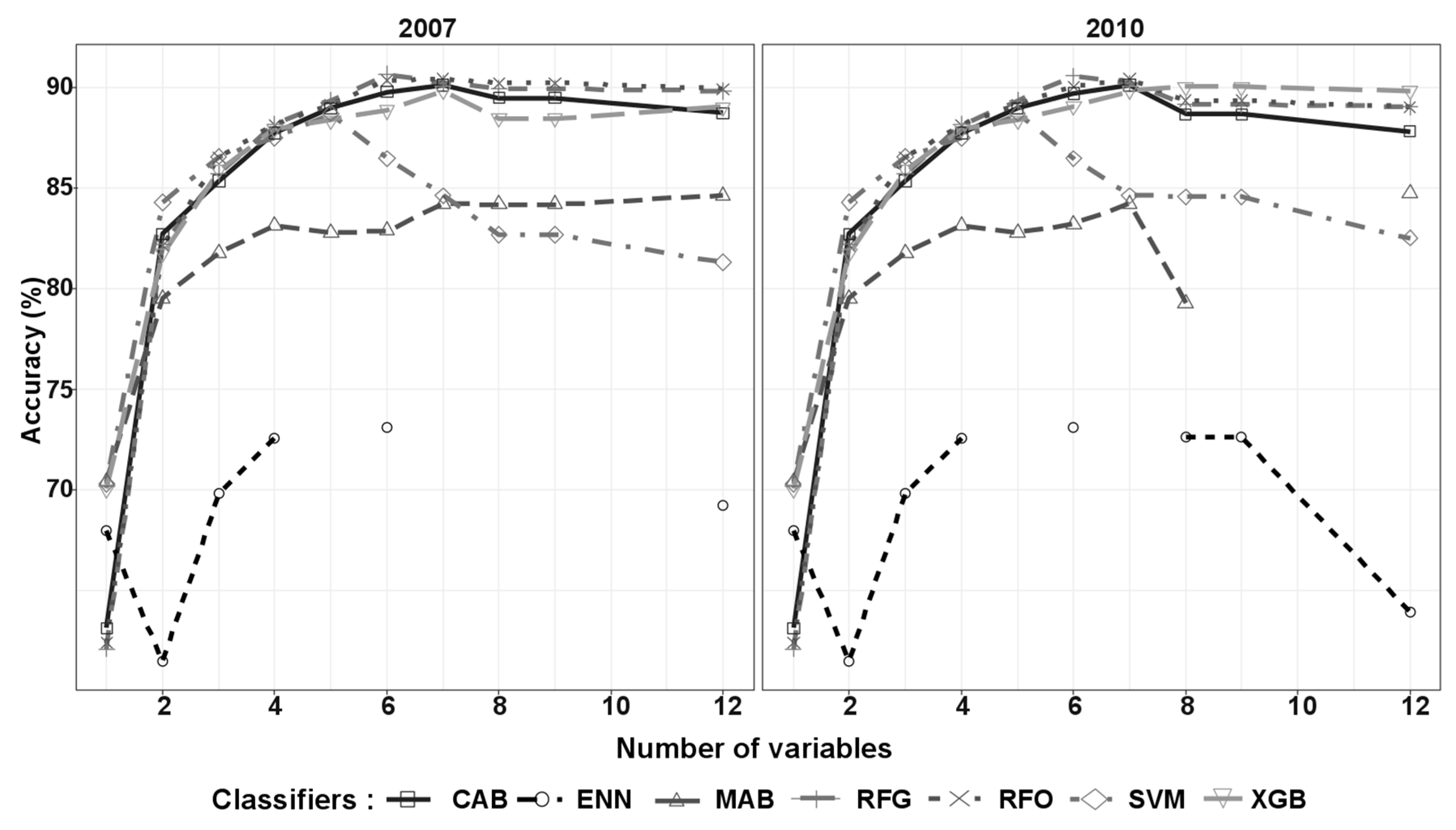
4.4. Comparing the Accuracy from All Data Layers and the Best Subset
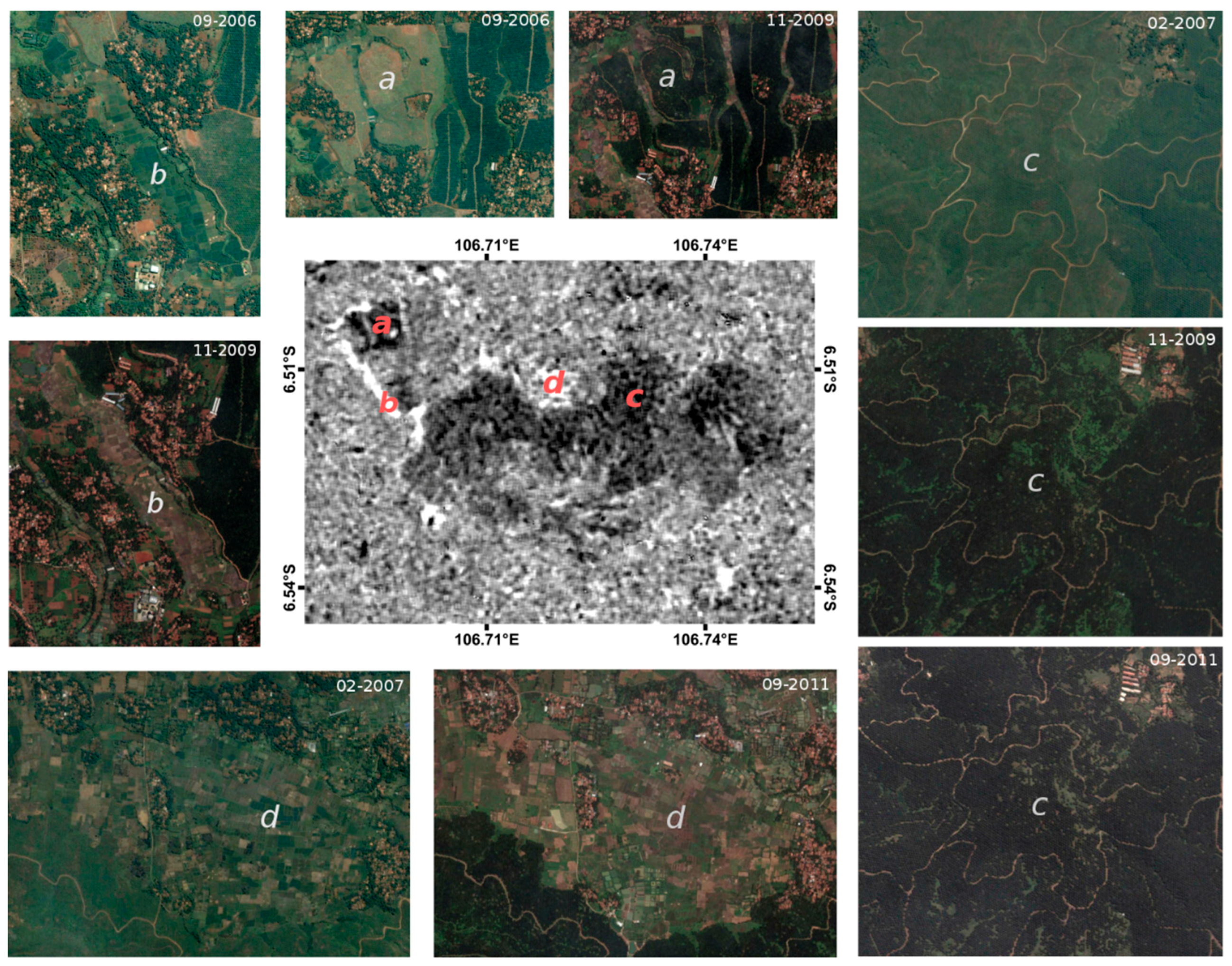
4.5. From-To Information of Change
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vogelmann, J.E.; Xian, G.; Homer, C.; Tolk, B. Monitoring gradual ecosystem change using Landsat time series analyses: Case studies in selected forest and rangeland ecosystems. Remote Sens. Environ. 2012, 122, 92–105. [Google Scholar] [CrossRef]
- Kayastha, N.; Thomas, V.; Galbraith, J.; Banskota, A. Monitoring wetland change using inter-annual landsat time-series data. Wetlands 2012, 32, 1149–1162. [Google Scholar] [CrossRef]
- Vogelmann, J.E.; Tolk, B.; Zhu, Z. Monitoring forest changes in the southwestern United States using multitemporal Landsat data. Remote Sens. Environ. 2009, 113, 1739–1748. [Google Scholar] [CrossRef]
- Townshend, J.R.G.; Justice, C.O. Analysis of the dynamics of African vegetation using the normalized difference vegetation index. Int. J. Remote Sens. 1986, 7, 1435–1445. [Google Scholar] [CrossRef]
- Jones, M.O.; Kimball, J.S.; Jones, L.A.; McDonald, K.C. Satellite passive microwave detection of North America start of season. Remote Sens. Environ. 2012, 123, 324–333. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, F.; Cheng, L.; Yang, K. Framework for monitoring the conversion of cultivated land to construction land using SAR image time series. Remote Sens. Lett. 2015, 6, 794–803. [Google Scholar] [CrossRef]
- Coppin, P.R.; Bauer, M.E. Processing of Multitemporal Landsat TM Imagery to Optimize Extraction of Forest Cover Change Features. IEEE Trans. Geosci. Remote Sens. 1994, 32, 918–927. [Google Scholar] [CrossRef]
- Bijker, W. Radar for Rainforest—A Monitoring System for Land Cover Change in the Colombian Amazon; European Space Agency, (Special Publication) ESA SP: Paris, France, 1997; pp. 53–60. [Google Scholar]
- Jin, Y.Q.; Chen, F.; Luo, L. Automatic detection of change direction of multi-temporal ERS-2 SAR images using two-threshold EM and MRF algorithms. Imaging Sci. J. 2004, 52, 234–241. [Google Scholar] [CrossRef]
- Chi, H.; Sun, G.; Ling, F. Urban dynamic change detection in southeastern China based on interferometric SAR. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa , 12–17 July 2009; pp. III-432–III-435. [Google Scholar]
- Moser, G.; Serpico, S.B. Generalized minimum-error thresholding for unsupervised change detection from SAR amplitude imagery. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2972–2982. [Google Scholar] [CrossRef] [Green Version]
- Grover, K.; Quegan, S.; Da Costa Freitas, C. Quantitative estimation of tropical forest cover by SAR. IEEE Trans. Geosci. Remote Sens. 1999, 37, 479–490. [Google Scholar] [CrossRef]
- Whittle, M.; Quegan, S.; Uryu, Y.; Stuewe, M.; Yulianto, K. Detection of tropical deforestation using ALOS-PALSAR: A Sumatran case study. Remote Sens. Environ. 2012, 124, 83–98. [Google Scholar] [CrossRef]
- Nielsen, A.A. The regularized iteratively reweighted MAD method for change detection in multi- and hyperspectral data. IEEE Trans. Image Process. 2007, 16, 463–478. [Google Scholar] [CrossRef]
- Crocetto, N.; Tarantino, E. A class-oriented strategy for features extraction from multidate ASTER imagery. Remote Sens. 2009, 1, 1171–1189. [Google Scholar] [CrossRef]
- Wang, B.; Choi, S.K.; Han, Y.K.; Lee, S.K.; Choi, J.W. Application of IRMAD using synthetically fused images for change detection in hyperspectral data. Remote Sens. Lett. 2015, 6, 578–586. [Google Scholar] [CrossRef]
- Marpu, P.R.; Gamba, P.; Canty, M.J. Improving change detection results of IRMAD by eliminating strong changes. IEEE Geosci. Remote Sens. Lett. 2011, 8, 799–803. [Google Scholar] [CrossRef]
- Lu, D.; Batistella, M.; Moran, E. Multitemporal spectral mixture analysis for Amazonian land-cover change detection. Can. J. Remote Sens. 2004, 30, 87–100. [Google Scholar] [CrossRef]
- Macleod, R.D.; Congalton, R.G. A quantitative comparison of change-detection algorithms for monitoring eelgrass from remotely sensed data. Photogramm. Eng. Remote Sens. 1998, 64, 207–216. [Google Scholar]
- Trisasongko, B.H.; Panuju, D.R.; Paull, D.J.; Jia, X.; Griffin, A.L. Comparing six pixel-wise classifiers for tropical rural land cover mapping using four forms of fully polarimetric SAR data. Int. J. Remote Sens. 2017, 38, 3274–3293. [Google Scholar] [CrossRef]
- Huang, C.; Davis, L.S.; Townshend, J.R.G. An assessment of support vector machines for land cover classification. Int. J. Remote Sens. 2002, 23, 725–749. [Google Scholar] [CrossRef]
- Pal, M.; Mather, P.M. An assessment of the effectiveness of decision tree methods for land cover classification. Remote Sens. Environ. 2003, 86, 554–565. [Google Scholar] [CrossRef]
- Nitze, I.; Barrett, B.; Cawkwell, F. Temporal optimisation of image acquisition for land cover classification with random forest and MODIS time-series. Int. J. Appl. Earth Obs. Geoinf. 2015, 34, 136–146. [Google Scholar] [CrossRef]
- Nielsen, A.A.; Conradsen, K.; Simpson, J.J. Multivariate alteration detection (MAD) and MAF postprocessing in multispectral, bitemporal image data: New approaches to change detection studies. Remote Sens. Environ. 1998, 64, 1–19. [Google Scholar] [CrossRef]
- Canty, M.J.; Nielsen, A.A. Automatic radiometric normalization of multitemporal satellite imagery with the iteratively re-weighted MAD transformation. Remote Sens. Environ. 2008, 112, 1025–1036. [Google Scholar] [CrossRef] [Green Version]
- Luo, H.; Liu, C.; Wu, C.; Guo, X. Urban Change Detection Based on Dempster–Shafer Theory for Multitemporal Very High-Resolution Imagery. Remote Sens. 2018, 10, 980. [Google Scholar] [CrossRef]
- Gong, J.Q.; Liu, Z.; Yan, Q.; Xu, Q. Object-Oriented Island Land Cover Change Detection by Iteratively Reweighted Multivariate Statistical Analysis. Mar. Geod. 2017, 40, 87–103. [Google Scholar] [CrossRef]
- Alaibakhsh, M.; Emelyanova, I.; Barron, O.; Mohyeddin, A.; Khiadani, M. Multivariate detection and attribution of land-cover changes in the Central Pilbara, Western Australia. Int. J. Remote Sens. 2015, 36, 2599–2621. [Google Scholar] [CrossRef]
- Panuju, D.R.; Paull, D.J.; Griffin, A.L.; Trisasongko, B.H. The performance of iteratively reweighted multivariate alteration detection (IRMAD) applied on untransformed and transformed Landsat surface reflectance. In Proceedings of the 38th Asian Conference on Remote Sensing—Space Applications: Touching Human Lives, New Delhi, India, 23–27 October 2017; pp. 317–325. [Google Scholar]
- Mas, J.F. Monitoring land-cover changes: A comparison of change detection techniques. Int. J. Remote Sens. 1999, 20, 139–152. [Google Scholar] [CrossRef]
- Lea, C.; Curtis, A. Thematic Accuracy Assessment Procedures: National Park Service Vegetation Inventory, Version 2.0; Natural resource report NPS/2010/NRR-2010/204; National Park Service, U.S. Department of the Interior: Fort Collins, CO, USA, 2010.
- Van Zyl, J.J.; Zebker, H.A.; Elachi, C. Imaging radar polarization signatures: Theory and observation. Radio Sci. 1987, 22, 529–543. [Google Scholar] [CrossRef]
- Pohl, C.; Van Genderen, J.L. Review article multisensor image fusion in remote sensing: Concepts, methods and applications. Int. J. Remote Sens. 1998, 19, 823–854. [Google Scholar] [CrossRef]
- Stramondo, S.; Bignami, C.; Chini, M.; Pierdicca, N.; Tertulliani, A. Satellite radar and optical remote sensing for earthquake damage detection: Results from different case studies. Int. J. Remote Sens. 2006, 27, 4433–4447. [Google Scholar] [CrossRef]
- Bovolo, F.; Bruzzone, L. A split-based approach to unsupervised change detection in large-size multitemporal images: Application to tsunami-damage assessment. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1658–1670. [Google Scholar] [CrossRef]
- Kuntz, S.; Siegert, F. Monitoring of deforestation and land use in Indonesia with multitemporal ERS data. Int. J. Remote Sens. 1999, 20, 2835–2853. [Google Scholar] [CrossRef]
- Arzandeh, S.; Wang, J.F. Monitoring the change of Phragmites distribution using satellite data. Can. J. Remote Sens. 2003, 29, 24–35. [Google Scholar] [CrossRef]
- Yayusman, L.F.; Nagasawa, R. ALOS-Sensor data integration for the detection of smallholder’s oil palm plantation in Southern Sumatra, Indonesia. J. Jpn. Agric. Syst. Soc. 2015, 31, 27–40. [Google Scholar] [CrossRef]
- Myneni, R.B.; Hall, F.G. The interpretation of spectral vegetation indexes. IEEE Trans. Geosci. Remote Sens. 1995, 33, 481–486. [Google Scholar] [CrossRef]
- Peddle, D.R.; Brunke, S.P.; Hall, F.G. A comparison of spectral mixture analysis and ten vegetation indices for estimating boreal forest biophysical information from airborne data. Can. J. Remote Sens. 2001, 27, 627–635. [Google Scholar] [CrossRef]
- Kim, K.; van Zyl, J.J. A Time-Series Approach to Estimate Soil Moisture Using Polarimetric Radar Data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2519–2527. [Google Scholar] [CrossRef]
- Trudel, M.; Charbonneau, F.J.; Leconte, R. Using RADARSAT-2 polarimetric and ENVISAT-ASAR dual-polarization data for estimating soil moisture over agricultural fields. Can. J. Remote Sens. 2012, 38, 514–527. [Google Scholar] [CrossRef]
- Ling, F.; Li, Z.; Chen, E.; Wang, Q. Comparison of ALOS PALSAR RVI and Landsat TM NDVI for forest area mapping. In Proceedings of the 2009 2nd Asian-Pacific Conference on Synthetic Aperture Radar, Xi’an China, 26–30 October 2009; pp. 132–135. [Google Scholar]
- Avtar, R.; Sawada, H.; Takeuchi, W.; Singh, G. Characterization of forests and deforestation in Cambodia using ALOS/PALSAR observation. Geocarto Int. 2012, 27, 119–137. [Google Scholar] [CrossRef]
- Cloude, S.R.; Pottier, E. A review of target decomposition theorems in radar polarimetry. IEEE Trans. Geosci. Remote Sens. 1996, 34, 498–518. [Google Scholar] [CrossRef]
- Rodriguez, K.M.; Weissel, J.K.; Kim, Y. Classification of landslide surfaces using fully polarimetric SAR: Examples from Taiwan. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002; Volume 2915, pp. 2918–2920. [Google Scholar]
- Qi, Z.; Yeh, A.G.O.; Li, X.; Lin, Z. Integration of Polarimetric Decomposition, Object-Oriented Image Analysis, and Decision Tree Algorithms for Land-Use and Land-Cover Classification using RADARSAT-2 Polarimetric SAR Data. Photogramm. Eng. Remote Sens. 2012, 78, 169–181. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textural Features for Image Classification. IEEE Trans. Syst. Man Cybern. 1973, SMC-3, 610–621. [Google Scholar] [CrossRef]
- Davis, L.S.; Johns, S.A.; Aggarwal, J.K. Texture Analysis Using Generalized Co-Occurrence Matrices. IEEE Trans. Pattern Anal. Mach. Intell. 1979, PAMI-1, 251–259. [Google Scholar] [CrossRef]
- Nyoungui, A.N.; Tonye, E.; Akono, A. Evaluation of speckle filtering and texture analysis methods for land cover classification from SAR images. Int. J. Remote Sens. 2002, 23, 1895–1925. [Google Scholar] [CrossRef]
- Dekker, R.J. Texture analysis and classification of ERS SAR images for map updating of urban areas in The Netherlands. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1950–1958. [Google Scholar] [CrossRef]
- Barreto, T.L.M.; Rosa, R.A.S.; Wimmer, C.; Moreira, J.R.; Bins, L.S.; Cappabianco, F.A.M.; Almeida, J. Classification of Detected Changes From Multitemporal High-Res Xband SAR Images: Intensity and Texture Descriptors From SuperPixels. IEEE J.-STARS 2016, 9, 5436–5448. [Google Scholar] [CrossRef]
- Lu, D.; Weng, Q. A survey of image classification methods and techniques for improving classification performance. Int. J. Remote Sens. 2007, 28, 823–870. [Google Scholar] [CrossRef] [Green Version]
- Otukei, J.R.; Blaschke, T. Land cover change assessment using decision trees, support vector machines and maximum likelihood classification algorithms. Int. J. Appl. Earth Obs. Geoinf. 2010, 12 (Suppl. 1), S27–S31. [Google Scholar] [CrossRef]
- Erbek, F.S.; Özkan, C.; Taberner, M. Comparison of maximum likelihood classification method with supervised artificial neural network algorithms for land use activities. Int. J. Remote Sens. 2004, 25, 1733–1748. [Google Scholar] [CrossRef]
- Dai, X.L.; Khorram, S. Remotely sensed change detection based on artificial neural networks. Photogramm. Eng. Remote Sens. 1999, 65, 1187–1194. [Google Scholar]
- Paola, J.D.; Schowengerdt, R.A. A detailed comparison of backpropagation neural network and maximum-likelihood classifiers for urban land use classification. IEEE Trans. Geosci. Remote Sens. 1995, 33, 981–996. [Google Scholar] [CrossRef]
- Pal, M.; Mather, P.M. Support vector machines for classification in remote sensing. Int. J. Remote Sens. 2005, 26, 1007–1011. [Google Scholar] [CrossRef]
- Srivastava, P.K.; Han, D.; Rico-Ramirez, M.A.; Bray, M.; Islam, T. Selection of classification techniques for land use/land cover change investigation. Adv. Space Res. 2012, 50, 1250–1265. [Google Scholar] [CrossRef]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Freund, Y.; Schapire, R.E. A Decision-Theoretic Generalization of On-Line Learning and an Application to Boosting. J. Comput. Syst. Sci. 1997, 55, 119–139. [Google Scholar] [CrossRef] [Green Version]
- Friedl, M.A.; Brodley, C.E.; Strahler, A.H. Maximizing land cover classification accuracies produced by decision trees at continental to global scales. IEEE Trans. Geosci. Remote Sens. 1999, 37, 969–977. [Google Scholar] [CrossRef]
- Tayyebi, A.; Pijanowski, B.C. Modeling multiple land use changes using ANN, CART and MARS: Comparing tradeoffs in goodness of fit and explanatory power of data mining tools. Int. J. Appl. Earth Obs. Geoinf. 2014, 28, 102–116. [Google Scholar] [CrossRef]
- Gutiérrez, Á.G.; Schnabel, S.; Lavado Contador, J.F. Using and comparing two nonparametric methods (CART and MARS) to model the potential distribution of gullies. Ecol. Model. 2009, 220, 3630–3637. [Google Scholar] [CrossRef]
- Prasad, A.M.; Iverson, L.R.; Liaw, A. Newer classification and regression tree techniques: Bagging and random forests for ecological prediction. Ecosystems 2006, 9, 181–199. [Google Scholar] [CrossRef]
- Huang, G.; Zhou, H.; Ding, X.; Zhang, R. Extreme Learning Machine for Regression and Multiclass Classification. IEEE Trans. Syst. Man Cybern. B 2012, 42, 513–529. [Google Scholar] [CrossRef] [Green Version]
- Razi, M.A.; Athappilly, K. A comparative predictive analysis of neural networks (NNs), nonlinear regression and classification and regression tree (CART) models. Expert Syst. Appl. 2005, 29, 65–74. [Google Scholar] [CrossRef]
- Nemmour, H.; Chibani, Y. Fuzzy neural network architecture for change detection in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 705–717. [Google Scholar] [CrossRef]
- Pacifici, F.; Del Frate, F.; Solimini, C.; Emery, W.J. An innovative neural-net method to detect temporal changes in high-resolution optical satellite imagery. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2940–2952. [Google Scholar] [CrossRef]
- Wylie, B.K.; Pastick, N.J.; Picotte, J.J.; Deering, C.A. Geospatial data mining for digital raster mapping. GISci. Remote Sens. 2018. [Google Scholar] [CrossRef]
- Li, Y.F.; Ng, S.H.; Xie, M.; Goh, T.N. A systematic comparison of metamodeling techniques for simulation optimization in Decision Support Systems. Appl. Soft Comput. 2010, 10, 1257–1273. [Google Scholar] [CrossRef]
- Jin, Y.; Liu, X.; Chen, Y.; Liang, X. Land-cover mapping using Random Forest classification and incorporating NDVI time-series and texture: A case study of central Shandong. Int. J. Remote Sens. 2018. [Google Scholar] [CrossRef]
- Na, X.; Zhang, S.; Li, X.; Yu, H.; Liu, C. Improved land cover mapping using random forests combined with landsat thematic mapper imagery and ancillary geographic data. Photogramm. Eng. Remote Sens. 2010, 76, 833–840. [Google Scholar] [CrossRef]
- Duro, D.C.; Franklin, S.E.; Dubé, M.G. A comparison of pixel-based and object-based image analysis with selected machine learning algorithms for the classification of agricultural landscapes using SPOT-5 HRG imagery. Remote Sens. Environ. 2012, 118, 259–272. [Google Scholar] [CrossRef]
- Chan, J.C.-W.; Paelinckx, D. Evaluation of Random Forest and Adaboost tree-based ensemble classification and spectral band selection for ecotope mapping using airborne hyperspectral imagery. Remote Sens. Environ. 2008, 112, 2999–3011. [Google Scholar] [CrossRef]
- Mellor, A.; Boukir, S.; Haywood, A.; Jones, S. Exploring issues of training data imbalance and mislabelling on random forest performance for large area land cover classification using the ensemble margin. ISPRS J. Photogramm. 2015, 105, 155–168. [Google Scholar] [CrossRef]
- Millard, K.; Richardson, M. On the Importance of Training Data Sample Selection in Random Forest Image Classification: A Case Study in Peatland Ecosystem Mapping. Remote Sens. 2015, 7, 8489–8515. [Google Scholar] [CrossRef] [Green Version]
- Dalponte, M.; Ørka, H.O.; Gobakken, T.; Gianelle, D.; Næsset, E. Tree Species Classification in Boreal Forests With Hyperspectral Data. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2632–2645. [Google Scholar] [CrossRef]
- Friedman, J.H. Greedy Function Approximation: A Gradient Boosting Machine. Ann. Stat. 2001, 29, 1189–1232. [Google Scholar] [CrossRef]
- Lombardo, L.; Cama, M.; Conoscenti, C.; Märker, M.; Rotigliano, E. Binary logistic regression versus stochastic gradient boosted decision trees in assessing landslide susceptibility for multiple-occurring landslide events: Application to the 2009 storm event in Messina (Sicily, southern Italy). Nat. Hazards 2015, 79, 1621–1648. [Google Scholar] [CrossRef]
- Hartono, T.; Kobayashi, H.; Widjaya, H.; Suparmo, M. Taman Nasional Gunung Halimun Salak, Edisi Revisi ed.; Japan International Cooperation Agency (JICA), Gunung Halimun Salak National Park Management Project: Bogor, Indonesia, 2007; p. 48. [Google Scholar]
- Jones, D.A.; Hansen, A.J.; Bly, K.; Doherty, K.; Verschuyl, J.P.; Paugh, J.I.; Carle, R.; Story, S.J. Monitoring land use and cover around parks: A conceptual approach. Remote Sens. Environ. 2009, 113, 1346–1356. [Google Scholar] [CrossRef]
- Rosenqvist, A.; Shimada, M.; Watanabe, M. ALOS PALSAR: Technical outline and mission concepts. In Proceedings of the 4th International Symposium on Retrieval of Bio- and Geophysical Parameters from SAR Data for Land Applications, Innsbruck, Austria, 16–19 November 2004. [Google Scholar]
- Shimada, M.; Isoguchi, O.; Tadono, T.; Isono, K. PALSAR radiometric and geometric calibration. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3915–3932. [Google Scholar] [CrossRef]
- Small, D.; Schubert, A. Guide to ASAR Geocoding; ESA-ESRIN Technical Note RSL-ASAR-GC-AD; Remote Sensing Laboratory, University of Zurich: Zurich, Switzerland, 2008; p. 36. [Google Scholar]
- Trisasongko, B.H. Mapping stand age of rubber plantation using ALOS-2 polarimetric SAR data. Eur. J. Remote Sens. 2017, 50, 64–76. [Google Scholar] [CrossRef] [Green Version]
- Canty, M.J.; Nielsen, A.A. Visualization and unsupervised classification of changes in multispectral satellite imagery. Int. J. Remote Sens. 2006, 27, 3961–3975. [Google Scholar] [CrossRef] [Green Version]
- Fung, T.; LeDrew, E. The determination of optimal threshold levels for change detection using various accuracy indices. Photogramm. Eng. Remote Sens. 1988, 54, 1449–1454. [Google Scholar]
- Nelson, R.F. Detecting Forest Canopy Change Due to Insect Activity Using Landsat Mss. Photogramm. Eng. Remote Sens. 1983, 49, 1303–1314. [Google Scholar]
- Nordberg, M.L.; Evertson, J. Monitoring Change in Mountainous Dry-heath Vegetation at a Regional Scale Using Multitemporal Landsat TM Data. Ambio 2003, 32, 502–509. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Shi, W.; Myint, S.W.; Lu, P.; Wang, Q. Semi-automated landslide inventory mapping from bitemporal aerial photographs using change detection and level set method. Remote Sens. Environ. 2016, 175, 215–230. [Google Scholar] [CrossRef]
- Cloude, S.R.; Pottier, E. An entropy based classification scheme for land applications of polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 1997, 35, 68–78. [Google Scholar] [CrossRef]
- Hijmans, R.J. Package Raster: Geographic Data Analysis and Modeling; R Package Version 2.6.7.; R Foundation for Statistical Computing: Vienna, Austria, 2017. [Google Scholar]
- Kuhn, M. Caret: Classification and Regression Training; R Foundation for Statistical Computing: Vienna, Austria, 2018. [Google Scholar]
- Li, Z.; Shi, W.; Lu, P.; Yan, L.; Wang, Q.; Miao, Z. Landslide mapping from aerial photographs using change detection-based Markov random field. Remote Sens. Environ. 2016, 187, 76–90. [Google Scholar] [CrossRef]
- Fung, T. An Assessment of TM Imagery for Land-Cover Change Detection. IEEE Trans. Geosci. Remote Sens. 1990, 28, 681–684. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.F.; Chica-Olmo, M.; Abarca-Hernandez, F.; Atkinson, P.M.; Jeganathan, C. Random Forest classification of Mediterranean land cover using multi-seasonal imagery and multi-seasonal texture. Remote Sens. Environ. 2012, 121, 93–107. [Google Scholar] [CrossRef]
- Liaw, A.; Wiener, M. Classification and regression by randomForest. R News 2002, 2, 18–22. [Google Scholar]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. Isprs. J. Photogramm. 2016, 114, 24–31. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Number of Layers | Data Combination |
|---|---|---|
| Backscatter | 2 | Dual polarisation HH, HV |
| Backscatter + Indices | 5 | Backscatter + Differencing HH-HV, ratioing HH/HV, Radar Vegetation Index (RVI) |
| Backscatter + Decomposition | 5 | Backscatter + Entropy Alpha decomposition (Entropy, Alpha, Anisotropy) |
| Backscatter + Textures | 8 | Backscatter + Texture components (mean, variance and correlation of HH or HV) |
| Classifiers | Parameters |
|---|---|
| Bagged Classification and Regression Tree | No tuning parameters |
| Extreme Learning Machine Neural Network | Number of hidden unit (nhid) = 1–20 Action function (actfun) = sine, radial basis, linear, tan-sigmoid |
| Bagged Multivariate Adaptive Regression Spline | Number of terms (nprune) = 2–200 Product degree (degree) = 1–2 |
| Regularised Random Forest | Randomly selected predictors (mtry) = 1-number of classes (7 or 12) Regularisation value (coefReg) = 0–1 |
| Random Forest | Randomly selected predictors (mtry) = 1–number of classes (7 or 12) |
| Support Vector Machine | Sigma = 0.1–0.9 Cost (C) = 25–210 |
| Xtreme Gradient Boosting Tree | Number of boosting iteration (nrounds) = 1–1000; Max tree depth (maxdepth) = 1–10; Shrinkage (eta) = 0.001–0.6; Minimum loss reduction (gamma) = 0–10; Subsample ratio of column (colsample-bytree) = 0.3–0.7; Minimum sum of instance weight (min-child-weight) = 0–20; Subsample percentage (subsample) = 0.25–1 |
| Name of Variable | Acronym |
|---|---|
| Sigma0 HH | HH |
| Sigma0 HV | HV |
| Differencing HH-HV | I_DIF |
| Ratioing HH/HV | I_RAT |
| Radar vegetation index | I_RVI |
| Decomposition Cloude Pottierþ—Alpha | CP_α |
| Decomposition Cloude Pottier—Entropy | CP_H |
| Decomposition Cloude Pottie—Anisotropy | CP_A |
| Texture GLCM—Mean of HH | TH_M |
| Texture GLCM—Variance of HH | TH_V |
| Texture GLCM—Mean of HV | TV_M |
| Texture GLCM—Mean of HV | TV_V |
| Methods | Abbreviations | 2007 | 2010 | Average | ||
|---|---|---|---|---|---|---|
| All | Best Subset | All | Best Subset | |||
| Bagged CART | CAB | 88.7 | 89.8 | 87.8 | 89.7 | 89.0 |
| Bagged MARS | MAB | 84.6 | 82.9 | 84.7 | 83.2 | 83.9 |
| ELM Neural Network | ENN | 69.2 | 73.1 | 63.9 | 73.1 | 69.8 |
| Extreme Gradient Boosting Tree | XGB | 89.0 | 88.8 | 89.8 | 89.0 | 89.2 |
| Random Forest Original | RFO | 89.9 | 90.4 | 89.0 | 90.0 | 89.8 |
| Regularised Random Forest | RFG | 89.8 | 90.6 | 89.0 | 90.6 | 90.0 |
| Support Vector Machine | SVM | 81.3 | 86.5 | 82.5 | 86.5 | 84.2 |
| Average accuracy (%) | 84.6 | 86.0 | 83.8 | 86.0 | 85.1 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Panuju, D.R.; Paull, D.J.; Trisasongko, B.H. Combining Binary and Post-Classification Change Analysis of Augmented ALOS Backscatter for Identifying Subtle Land Cover Changes. Remote Sens. 2019, 11, 100. https://doi.org/10.3390/rs11010100
Panuju DR, Paull DJ, Trisasongko BH. Combining Binary and Post-Classification Change Analysis of Augmented ALOS Backscatter for Identifying Subtle Land Cover Changes. Remote Sensing. 2019; 11(1):100. https://doi.org/10.3390/rs11010100
Chicago/Turabian StylePanuju, Dyah R., David J. Paull, and Bambang H. Trisasongko. 2019. "Combining Binary and Post-Classification Change Analysis of Augmented ALOS Backscatter for Identifying Subtle Land Cover Changes" Remote Sensing 11, no. 1: 100. https://doi.org/10.3390/rs11010100
APA StylePanuju, D. R., Paull, D. J., & Trisasongko, B. H. (2019). Combining Binary and Post-Classification Change Analysis of Augmented ALOS Backscatter for Identifying Subtle Land Cover Changes. Remote Sensing, 11(1), 100. https://doi.org/10.3390/rs11010100