Improvement and Validation of NASA/MODIS NRT Global Flood Mapping

 ,
,  ,
,
Abstract
1. Introduction
2. Materials and Methods
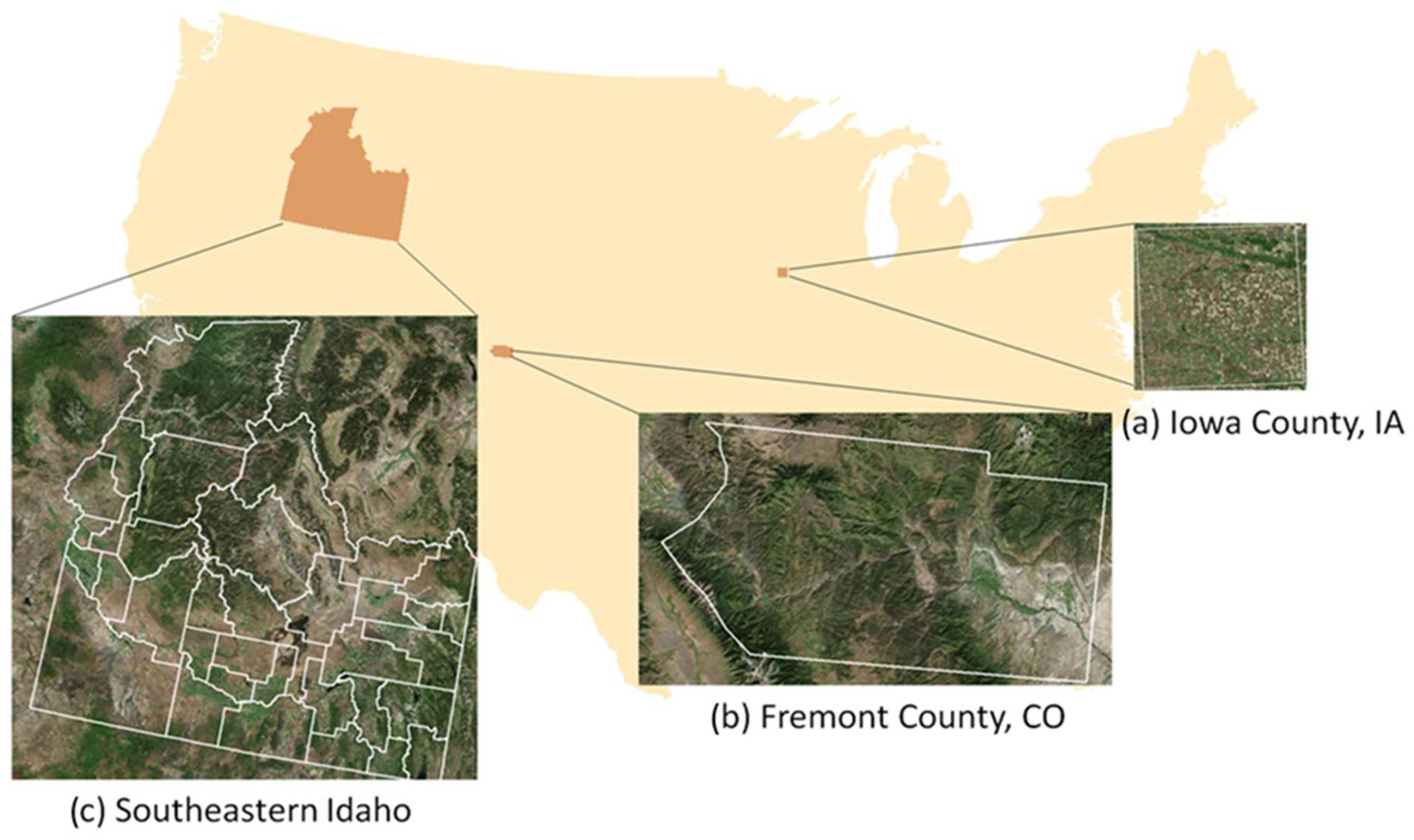
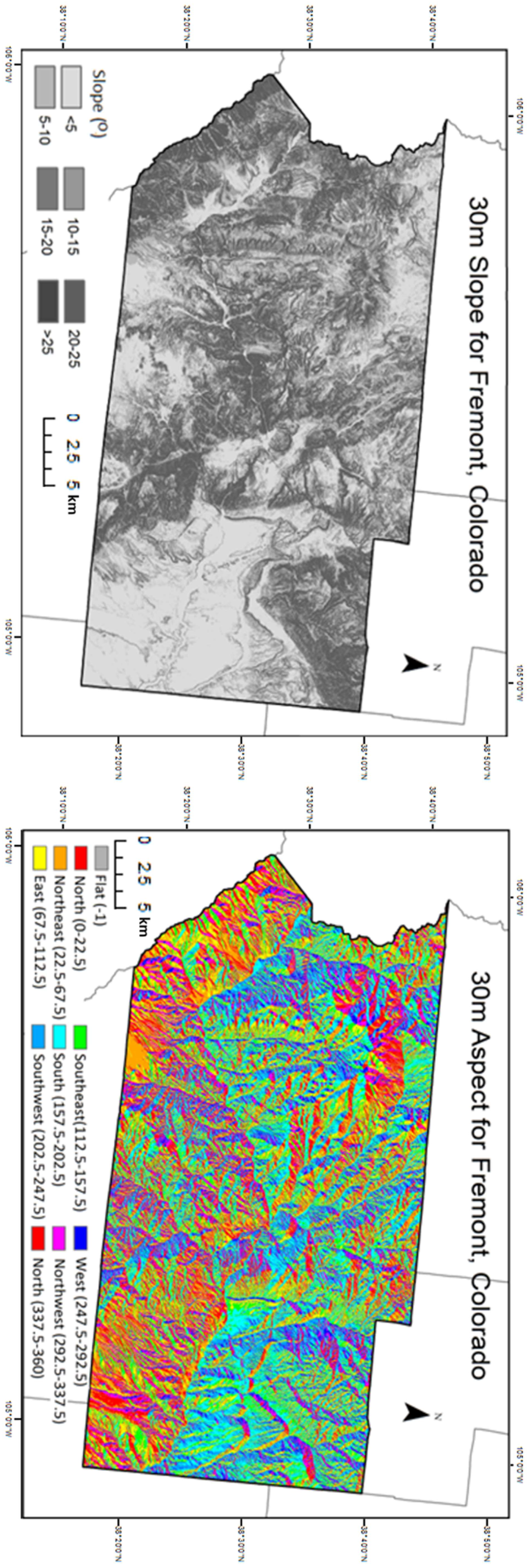
2.1. Study Area and Data Processing
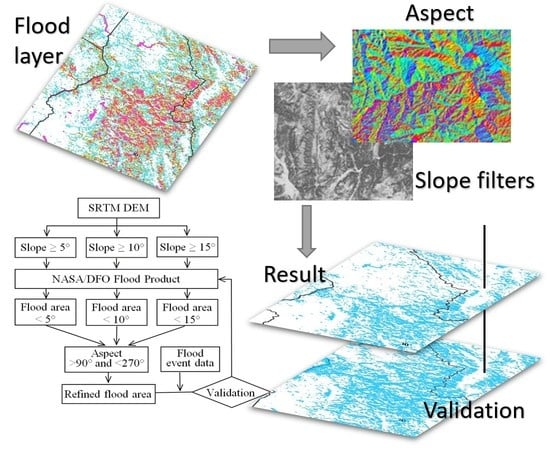
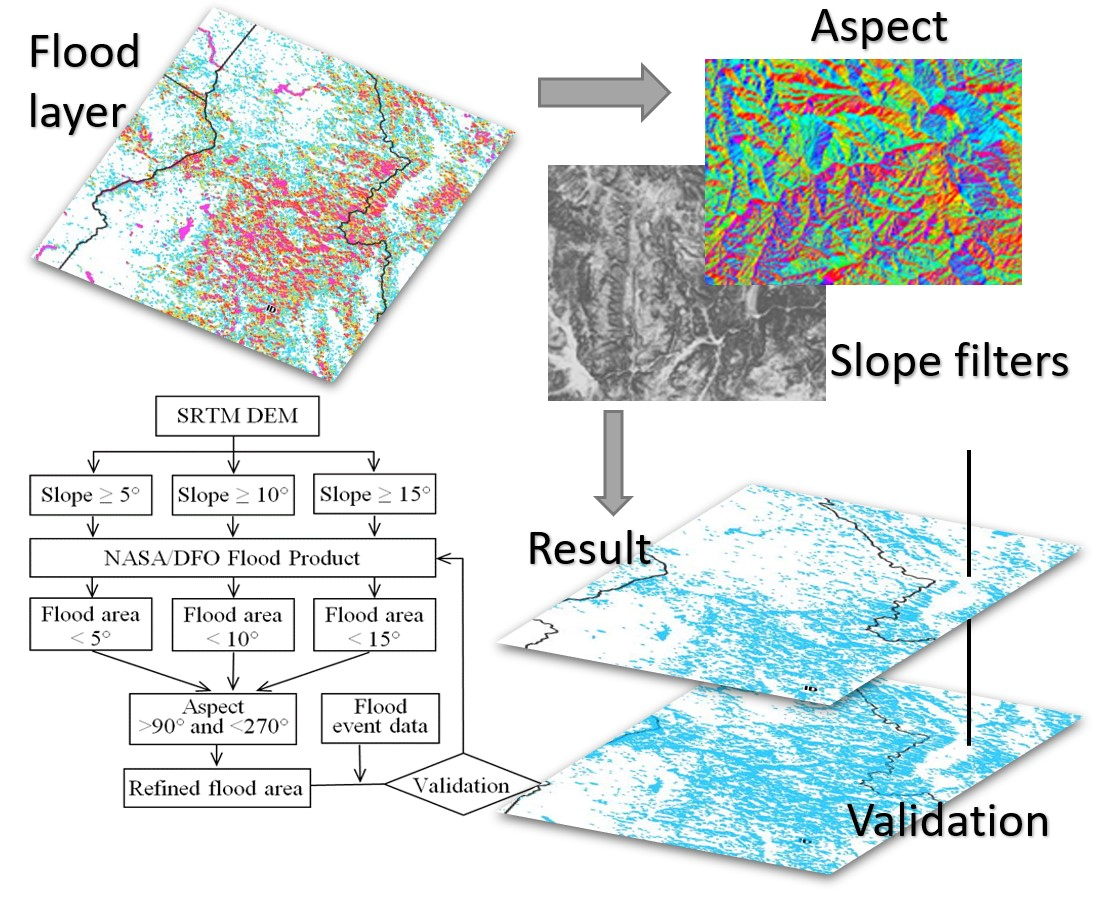
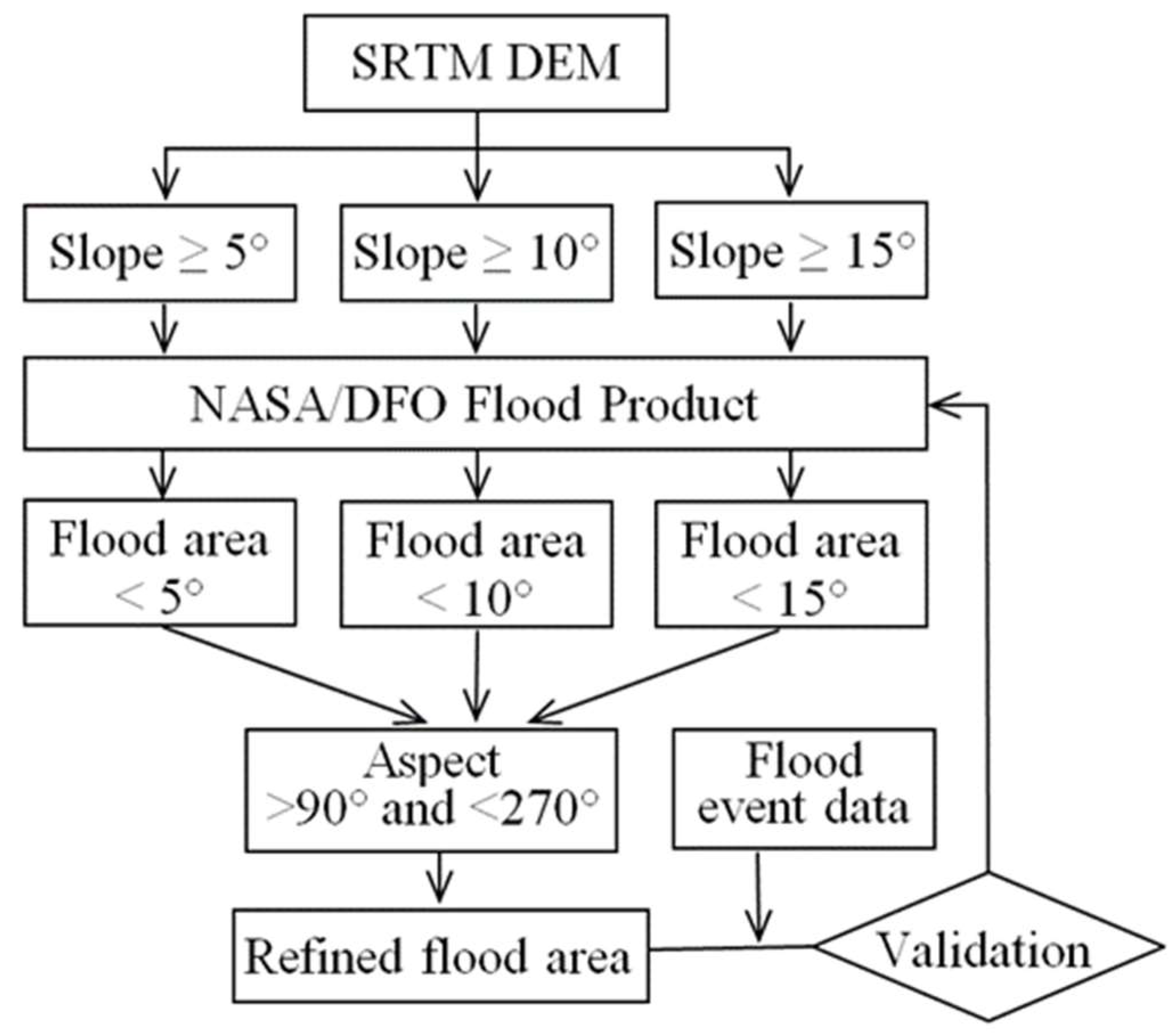
2.2. Methodology
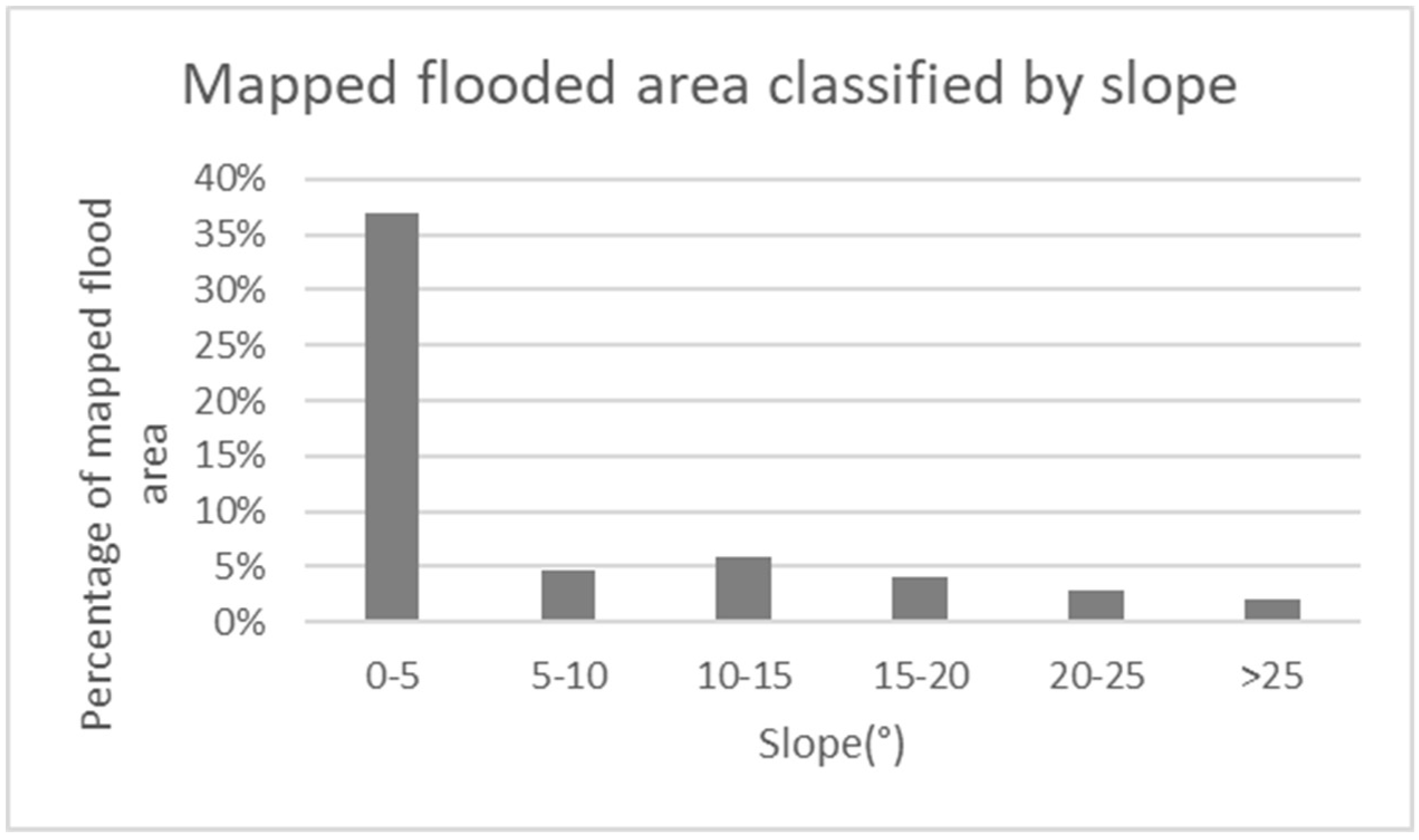
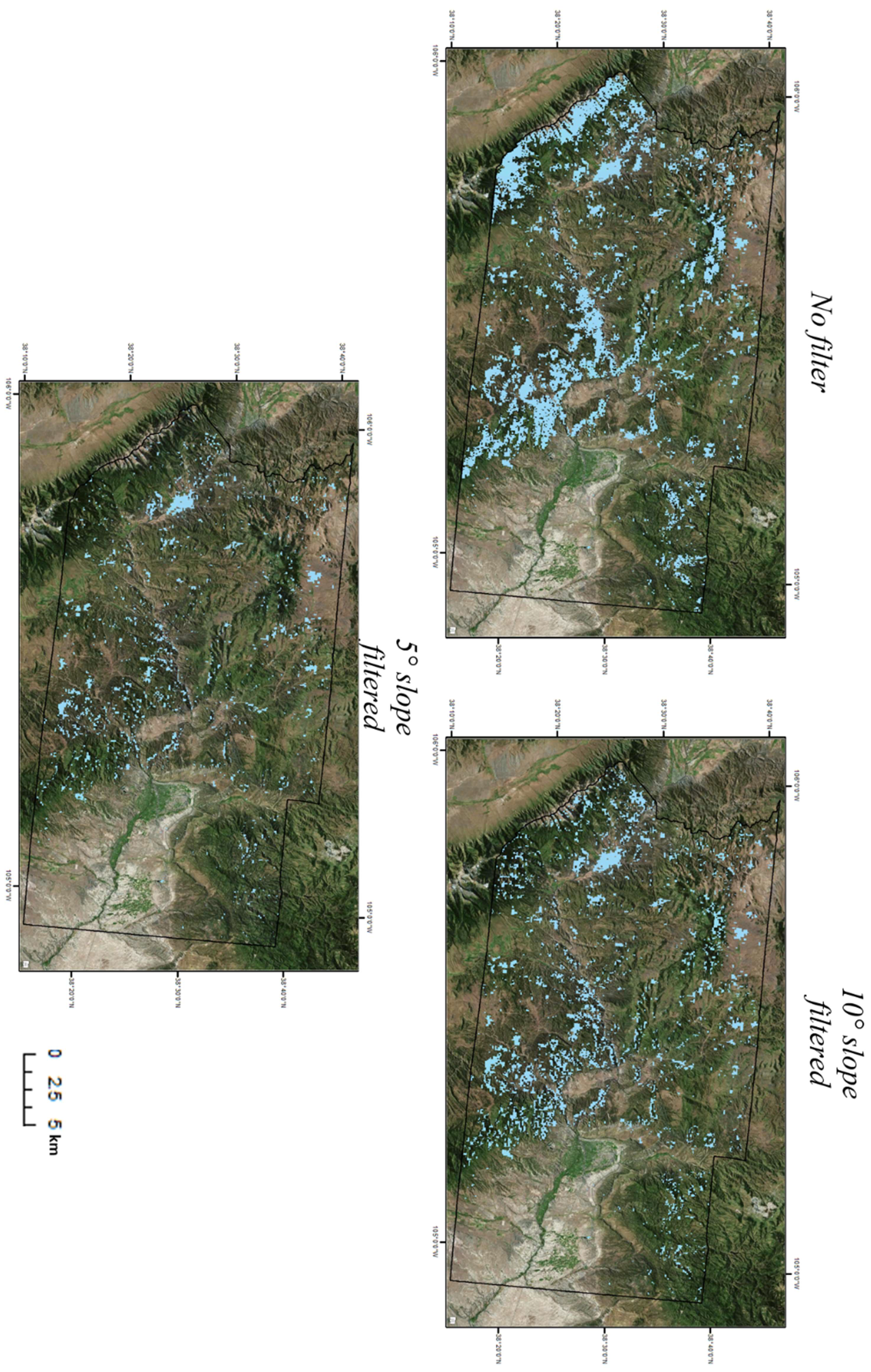
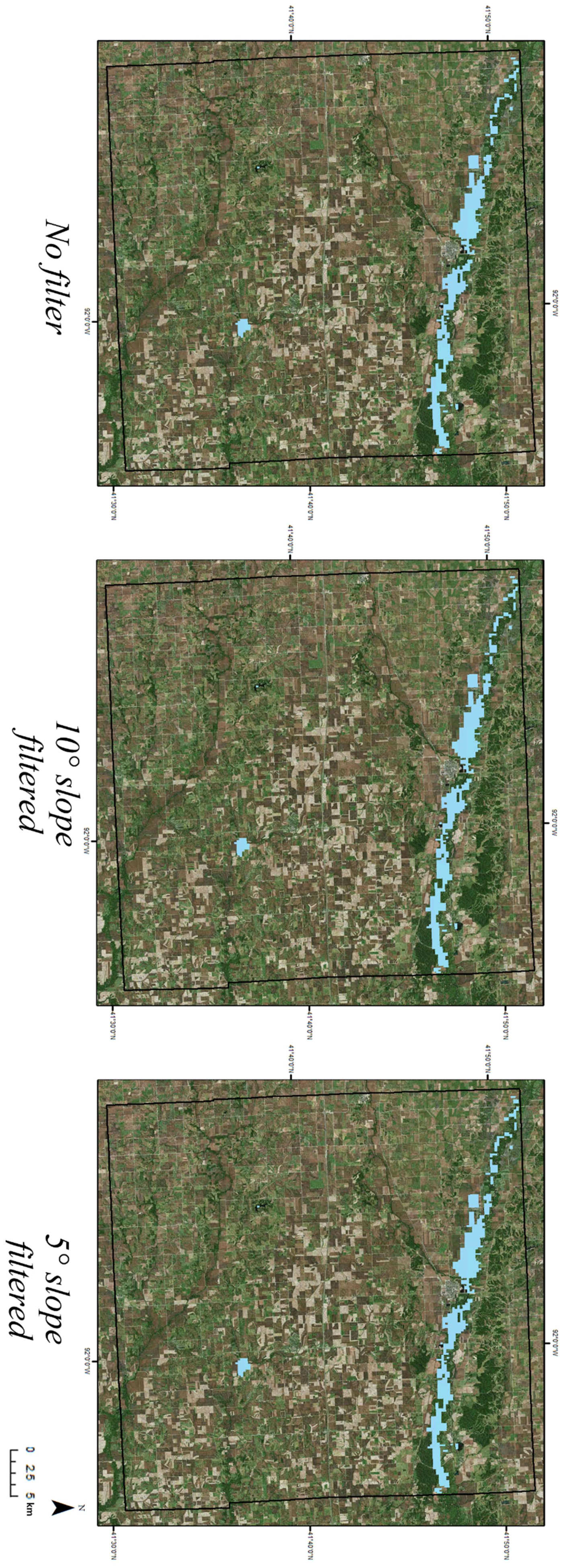
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Adhikari, P.; Hong, Y.; Douglas, K.R.; Kirschbaum, D.B.; Gourley, J.; Adler, R.; Brakenridge, G.R. A digitized global flood inventory (1998–2008): Compilation and preliminary results. Nat. Hazards 2010, 55, 405–422. [Google Scholar] [CrossRef]
- Hirabayashi, Y.; Mahendran, R.; Koirala, S.; Konoshima, L.; Yamazaki, D.; Watanabe, S.; Kim, H.; Kanae, S. Global flood risk under climate change. Nat. Clim. Chang. 2013, 3, 816–821. [Google Scholar] [CrossRef]
- Disaster Statistics—UNISDR. Available online: https://www.unisdr.org/we/inform/disaster-statistics (accessed on 25 September 2018).
- Yilmaz, K.K.; Adler, R.F.; Tian, Y.; Hong, Y.; Pierce, H.F. Evaluation of a satellite-based global flood monitoring system. Int. J. Remote Sens. 2010, 31, 3763–3782. [Google Scholar] [CrossRef]
- Arnesen, A.S.; Silva, T.S.; Hess, L.L.; Novo, E.M.; Rudorff, C.M.; Chapman, B.D.; McDonald, K.C. Monitoring flood extent in the lower Amazon River floodplain using ALOS/PALSAR ScanSAR images. Remote Sens. Environ. 2013, 130, 51–61. [Google Scholar] [CrossRef]
- Di, S.; Guo, L.; Lin, L. Rapid Estimation of Flood Crop Loss by Using DVDI. In Proceedings of the 2018 7th International Conference on Agro-geoinformatics (Agro-geoinformatics), Hangzhou, China, 6–9 August 2018; pp. 1–4. [Google Scholar]
- Di, L.; Yu, E.; Shrestha, R.; Lin, L. DVDI: A New Remotely Sensed Index for Measuring Vegetation Damage Caused by Natural Disasters. In Proceedings of the IGARSS 2018-2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 9067–9069. [Google Scholar]
- Kwak, Y.; Shrestha, B.B.; Yorozuya, A.; Sawano, H. Rapid damage assessment of rice crop after large-scale flood in the cambodian floodplain using temporal spatial data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3700–3709. [Google Scholar] [CrossRef]
- Kotera, A.; Nagano, T.; Hanittinan, P.; Koontanakulvong, S. Assessing the degree of flood damage to rice crops in the Chao Phraya delta, Thailand, using MODIS satellite imaging. Paddy Water Environ. 2016, 14, 271–280. [Google Scholar] [CrossRef]
- Lin, L.; Di, L.; Yu, E.G.; Kang, L.; Shrestha, R.; Rahman, M.S.; Tang, J.; Deng, M.; Sun, Z.; Zhang, C.; et al. A review of remote sensing in flood assessment. In Proceedings of the 2016 Fifth International Conference on Agro-Geoinformatics (Agro-Geoinformatics), Tianjin, China, 18–20 July 2016; pp. 1–4. [Google Scholar]
- Sakamoto, T.; Van Nguyen, N.; Kotera, A.; Ohno, H.; Ishitsuka, N.; Yokozawa, M. Detecting temporal changes in the extent of annual flooding within the Cambodia and the Vietnamese Mekong Delta from MODIS time-series imagery. Remote Sens. Environ. 2007, 109, 295–313. [Google Scholar] [CrossRef]
- Rahman, M.S.; Di, L.; Shrestha, R.; Eugene, G.Y.; Lin, L.; Zhang, C.; Hu, L.; Tang, J.; Yang, Z. Agriculture flood mapping with Soil Moisture Active Passive (SMAP) data: A case of 2016 Louisiana flood. In Proceedings of the 2017 6th International Conference on Agro-Geoinformatics, Fairfax, VA, USA, 7–10 August 2017; pp. 1–6. [Google Scholar]
- Blasco, F.; Bellan, M.F.; Chaudhury, M. Estimating the extent of floods in Bangladesh using SPOT data. Remote Sens. Environ. 1992, 39, 167–178. [Google Scholar] [CrossRef]
- Brivio, P.; Gregoire, J.; Zilioli, E. The detection of hydrological indicators in the study of Niger River regime by means of Landsat imageries. ITC J. 1984, 3, 191–199. [Google Scholar]
- Lougeay, R.; Baumann, P.; Nellis, M.D. Two digital approaches for calculating the area of regions affected by the great American flood of 1993. Geocarto Int. 1994, 9, 53–59. [Google Scholar] [CrossRef]
- Barton, I.J.; Bathols, J.M. Monitoring floods with AVHRR. Remote Sens. Environ. 1989, 30, 89–94. [Google Scholar] [CrossRef]
- Sanyal, J.; Lu, X. Application of remote sensing in flood management with special reference to monsoon Asia: A review. Nat. Hazards 2004, 33, 283–301. [Google Scholar] [CrossRef]
- Sun, D.; Yu, Y.; Goldberg, M.D. Deriving water fraction and flood maps from MODIS images using a decision tree approach. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 4, 814–825. [Google Scholar] [CrossRef]
- Cretaux, J.-F.; Berge-Nguyen, M.; Leblanc, M.; Abarca Del Rio, R.; Delclaux, F.; Mognard, N.; Lion, C.; Pandey, R.K.; Tweed, S.; Calmant, S.; et al. Flood mapping inferred from remote sensing data. Int. Water Technol. J. 2011, 1, 48–62. [Google Scholar]
- Nestler, M.; Pfister, R. The NASA Earth Observing System Data Gateway. In Proceedings of the AGU Fall Meeting Abstracts, San Francisco, CA, USA, 6–10 December 2002; pp. 710–714. [Google Scholar]
- Xiao, X.; Boles, S.; Frolking, S.; Li, C.; Babu, J.Y.; Salas, W.; Moore III, B. Mapping paddy rice agriculture in South and Southeast Asia using multi-temporal MODIS images. Remote Sens. Environ. 2006, 100, 95–113. [Google Scholar] [CrossRef]
- Zhan, X.; Sohlberg, R.; Townshend, J.; DiMiceli, C.; Carroll, M.; Eastman, J.; Hansen, M.; DeFries, R. Detection of land cover changes using MODIS 250 m data. Remote Sens. Environ. 2002, 83, 336–350. [Google Scholar] [CrossRef]
- Hong, Y.; Adler, R.F.; Hossain, F.; Curtis, S.; Huffman, G.J. A first approach to global runoff simulation using satellite rainfall estimation. Water Resour. Res. 2007, 43. [Google Scholar] [CrossRef]
- Dartmouth Flood Observatory (DFO) Dartmouth Atlas of Global Flood Hazard. Available online: https://floodmap.modaps.eosdis.nasa.gov/ (accessed on 25 September 2018).
- Revilla-Romero, B.; Hirpa, F.A.; Pozo, J.T.; Salamon, P.; Brakenridge, R.; Pappenberger, F.; De Groeve, T. On the use of global flood forecasts and satellite-derived inundation maps for flood monitoring in data-sparse regions. Remote Sens. 2015, 7, 15702–15728. [Google Scholar] [CrossRef]
- Saha, A.; Arora, M.; Csaplovics, E.; Gupta, R. Land cover classification using IRS LISS III image and DEM in a rugged terrain: A case study in Himalayas. Geocarto Int. 2005, 20, 33–40. [Google Scholar] [CrossRef]
- Shahtahmassebi, A.; Yang, N.; Wang, K.; Moore, N.; Shen, Z. Review of shadow detection and de-shadowing methods in remote sensing. Chin. Geogr. Sci. 2013, 23, 403–420. [Google Scholar] [CrossRef]
- Li, S.; Sun, D.; Yu, Y. Automatic cloud-shadow removal from flood/standing water maps using MSG/SEVIRI imagery. Int. J. Remote Sens. 2013, 34, 5487–5502. [Google Scholar] [CrossRef]
- Brakenridge, R.; Anderson, E. MODIS-based flood detection, mapping and measurement: The potential for operational hydrological applications. In Transboundary Floods: Reducing Risks through Flood Management; Springer: Dordrecht, The Netherlands, 2006; pp. 1–12. [Google Scholar]
- Fayne, J.V.; Bolten, J.D.; Doyle, C.S.; Fuhrmann, S.; Rice, M.T.; Houser, P.R.; Lakshmi, V. Flood mapping in the lower Mekong River Basin using daily MODIS observations. Int. J. Remote Sens. 2017, 38, 1737–1757. [Google Scholar] [CrossRef]
- Di, L.; Eugene, G.Y.; Kang, L.; Shrestha, R.; BAI, Y. RF-CLASS: A remote-sensing-based flood crop loss assessment cyber-service system for supporting crop statistics and insurance decision-making. J. Integr. Agric. 2017, 16, 408–423. [Google Scholar] [CrossRef]
- Ackerman, S.; Strabala, K.; Menzel, P.; Frey, R.; Moeller, C.; Gumley, L.; Baum, B.; Schaaf, C.; Riggs, G. Discriminating clear-sky from cloud with modis algorithm theoretical basis document (mod35) 1997. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.385.7073&rep=rep1&type=pdf (accessed on 3 October 2018).
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Simpson, J.J.; Jin, Z.; Stitt, J.R. Cloud shadow detection under arbitrary viewing and illumination conditions. IEEE Trans. Geosci. Remote Sens. 2000, 38, 972–976. [Google Scholar] [CrossRef]
- Hutchison, K.D.; Mahoney, R.L.; Vermote, E.F.; Kopp, T.J.; Jackson, J.M.; Sei, A.; Iisager, B.D. A geometry-based approach to identifying cloud shadows in the VIIRS cloud mask algorithm for NPOESS. J. Atmos. Ocean. Technol. 2009, 26, 1388–1397. [Google Scholar] [CrossRef]
- Rosin, P.L.; Ellis, T.J. Image difference threshold strategies and shadow detection. In Proceedings of the BMVC, Birmingham, UK, 11–14 September 1995; Volume 95, pp. 347–356. [Google Scholar]
- Melesse, A.M.; Jordan, J.D. A comparison of fuzzy vs. augmented-ISODATA classification algorithms for cloud-shadow discrimination from Landsat images. Photogramm. Eng. Remote Sens. 2002, 68, 905–912. [Google Scholar]
- Luo, Y.; Trishchenko, A.P.; Khlopenkov, K.V. Developing clear-sky, cloud and cloud shadow mask for producing clear-sky composites at 250-meter spatial resolution for the seven MODIS land bands over Canada and North America. Remote Sens. Environ. 2008, 112, 4167–4185. [Google Scholar] [CrossRef]
- Meng, Q.; Borders, B.E.; Cieszewski, C.J.; Madden, M. Closest spectral fit for removing clouds and cloud shadows. Photogramm. Eng. Remote Sens. 2009, 75, 569–576. [Google Scholar] [CrossRef]
- Zhang, R.; Sun, D.; Li, S.; Yu, Y. A stepwise cloud shadow detection approach combining geometry determination and SVM classification for MODIS data. Int. J. Remote Sens. 2013, 34, 211–226. [Google Scholar] [CrossRef]
- Simpson, J.J.; Stitt, J.R. A procedure for the detection and removal of cloud shadow from AVHRR data over land. IEEE Trans. Geosci. Remote Sens. 1998, 36, 880–897. [Google Scholar] [CrossRef]
- Proy, C.; Tanre, D.; Deschamps, P. Evaluation of topographic effects in remotely sensed data. Remote Sens. Environ. 1989, 30, 21–32. [Google Scholar] [CrossRef]
- Giles, P.T. Remote sensing and cast shadows in mountainous terrain. Photogramm. Eng. Remote Sens. 2001, 67, 833–840. [Google Scholar]
- Brakenridge, G. Technical Description, DFO-GSFC Surface Water Mapping Algorithm. Available online: http://floodobservatory.colorado.edu/Tech.html (accessed on 3 October 2018).
- .Arévalo, V.; González, J.; Ambrosio, G. Shadow detection in colour high-resolution satellite images. Int. J. Remote Sens. 2008, 29, 1945–1963. [Google Scholar] [CrossRef]
- Shahi, K.; Shafri, H.Z.; Taherzadeh, E. A novel spectral index for automatic shadow detection in urban mapping based on WorldView-2 satellite imagery. Int. J. Comput. Electr. Autom. Control Inf. Eng. 2014, 8, 1685–1688. [Google Scholar]
- U.S. Geological Survey USGS Flood History. Available online: https://water.usgs.gov/floods/history.html (accessed on 25 September 2018).
- Lin, L.; Di, L.; Yu, E.G.; Tang, J.; Shrestha, R.; Rahman, M.S.; Kang, L.; Sun, Z.; Zhang, C.; Hu, L.; et al. Extract flood duration from Dartmouth Flood Observatory flood product. In Proceedings of the 2017 6th International Conference on Agro-Geoinformatics, Fairfax, VA, USA, 7–10 August 2017; pp. 1–4. [Google Scholar]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The shuttle radar topography mission. Rev. Geophys. 2007, 45. [Google Scholar] [CrossRef]
- Jet Propulsion Laboratory U.S. Releases Enhanced Shuttle Land Elevation Data. Available online: https://www.jpl.nasa.gov/news/news.php?release=2014-321 (accessed on 3 October 2018).
- Jet Propulsion Laboratory U.S. Releases Enhanced Shuttle Land Elevation Data. Available online: http://www2.jpl.nasa.gov/srtm/ (accessed on 3 October 2018).
- Yu, L.; Gong, P. Google Earth as a virtual globe tool for Earth science applications at the global scale: Progress and perspectives. Int. J. Remote Sens. 2012, 33, 3966–3986. [Google Scholar] [CrossRef]
- Lin, L.; Di, L.; Zhang, C.; Hu, L.; Tang, J.; Yu, E. Developing a Web service based application for demographic information modeling and analyzing. In Proceedings of the 2017 6th International Conference on Agro-Geoinformatics, Fairfax, VA, USA, 7–10 August 2017; pp. 1–5. [Google Scholar]
- Sun, Z.; Di, L.; Hao, H.; Wu, X.; Tong, D.Q.; Zhang, C.; Virgei, C.; Fang, H.; Yu, E.; Tan, X.; et al. CyberConnector: a service-oriented system for automatically tailoring multisource Earth observation data to feed Earth science models. Earth Science Informatics 2018, 11, 1–17. [Google Scholar] [CrossRef]
- Sun, Z.; Di, L.; Heo, G.; Zhang, C.; Fang, H.; Yue, P.; Jiang, L.; Tan, X.; Guo, L.; Lin, L. GeoFairy: Towards a one-stop and location based Service for Geospatial Information Retrieval. Comput. Environ. Urban Syst. 2017, 62, 156–167. [Google Scholar] [CrossRef]
- Sun, Z.; Di, L.; Zhang, C.; Fang, H.; Yu, E.; Lin, L.; Tang, J.; Tan, X.; Liu, Z.; Jiang, L.; et al. Building robust geospatial web services for agricultural information extraction and sharing. In Proceedings of the 2017 6th International Conference on Agro-Geoinformatics, Fairfax, VA, USA, 7–10 August 2017; pp. 1–4. [Google Scholar]
- Zhang, C.; Di, L.; Sun, Z.; Eugene, G.Y.; Hu, L.; Lin, L.; Tang, J.; Rahman, M.S. Integrating OGC Web Processing Service with cloud computing environment for Earth Observation data. In Proceedings of the 2017 6th International Conference on Agro-Geoinformatics, Fairfax, VA, USA, 7–10 August 2017; pp. 1–4. [Google Scholar]
- Zhang, C.; Di, L.; Sun, Z.; Lin, L.; Eugene, G.Y.; Gaigalas, J. Exploring cloud-based Web Processing Service: A case study on the implementation of CMAQ as a service. Environ. Model. Softw. 2018. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (Unit: km2) | North | East | South | West | Total |
|---|---|---|---|---|---|
| Total flood area | 4537.99 | 2405.00 | 2153.97 | 2113.58 | 11210.54 |
| 15° slope filter | |||||
| Removed area | 1708.13 | 725.30 | 533.24 | 732.95 | 3699.62 |
| Filtered results | 2829.87 | 1679.70 | 1620.73 | 1380.62 | 7510.92 |
| 10° slope filter | |||||
| Removed area | 2652.36 | 1212.10 | 882.95 | 1107.36 | 5854.77 |
| Filtered results | 1885.64 | 1192.90 | 1271.02 | 1006.21 | 5355.77 |
| 5° slope filter | |||||
| Removed area | 3614.35 | 1765.68 | 1360.94 | 1531.80 | 8272.77 |
| Filtered results | 923.64 | 639.31 | 793.03 | 581.79 | 2937.77 |
| Slope Filter | Test | Gold Standard | |
|---|---|---|---|
| Not-Water | Water | ||
| 15 ° | not-water | 1938.172 km2 (TP) | 6.542 km2 (FP) |
| water | 501.921 km2 (FN) | 203 km2 (TN) | |
| 10 ° | not-water | 2145.758 km2 (TP) | 16.786 km2 (FP) |
| water | 294.336 km2 (FN) | 193.214 km2 (TN) | |
| 5 ° | not-water | 2335.774 km2 (TP) | 35.487 km2 (FP) |
| water | 104.320 km2 (FN) | 174.512 km2 (TN) | |
| Slope Filter | True Positive Rate | False Negative Rate | False Positive Rate | True Negative Rate | Positive Predictive | Negative Predictive | Overall Accuracy |
|---|---|---|---|---|---|---|---|
| 15 ° | 0.794 | 0.206 | 0.031 | 0.969 | 0.997 | 0.288 | 0.808 |
| 10 ° | 0.879 | 0.121 | 0.080 | 0.920 | 0.992 | 0.396 | 0.883 |
| 5 ° | 0.957 | 0.042 | 0.169 | 0.831 | 0.985 | 0.626 | 0.947 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, L.; Di, L.; Tang, J.; Yu, E.; Zhang, C.; Rahman, M.S.; Shrestha, R.; Kang, L. Improvement and Validation of NASA/MODIS NRT Global Flood Mapping. Remote Sens. 2019, 11, 205. https://doi.org/10.3390/rs11020205
Lin L, Di L, Tang J, Yu E, Zhang C, Rahman MS, Shrestha R, Kang L. Improvement and Validation of NASA/MODIS NRT Global Flood Mapping. Remote Sensing. 2019; 11(2):205. https://doi.org/10.3390/rs11020205
Chicago/Turabian StyleLin, Li, Liping Di, Junmei Tang, Eugene Yu, Chen Zhang, Md. Shahinoor Rahman, Ranjay Shrestha, and Lingjun Kang. 2019. "Improvement and Validation of NASA/MODIS NRT Global Flood Mapping" Remote Sensing 11, no. 2: 205. https://doi.org/10.3390/rs11020205
APA StyleLin, L., Di, L., Tang, J., Yu, E., Zhang, C., Rahman, M. S., Shrestha, R., & Kang, L. (2019). Improvement and Validation of NASA/MODIS NRT Global Flood Mapping. Remote Sensing, 11(2), 205. https://doi.org/10.3390/rs11020205