Near-Real-Time Flood Forecasting Based on Satellite Precipitation Products




Abstract
:1. Introduction
2. Study Area and Data
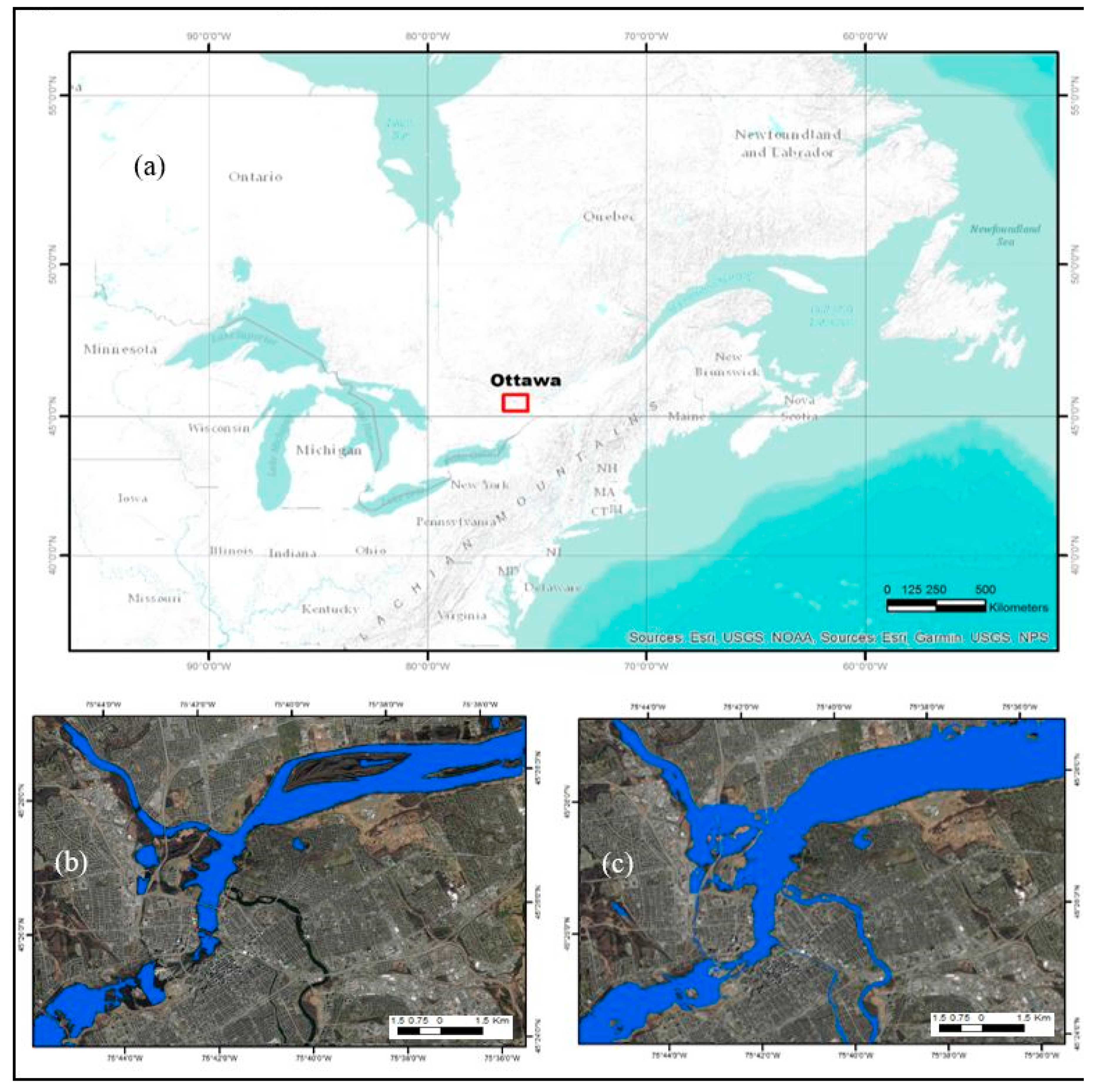
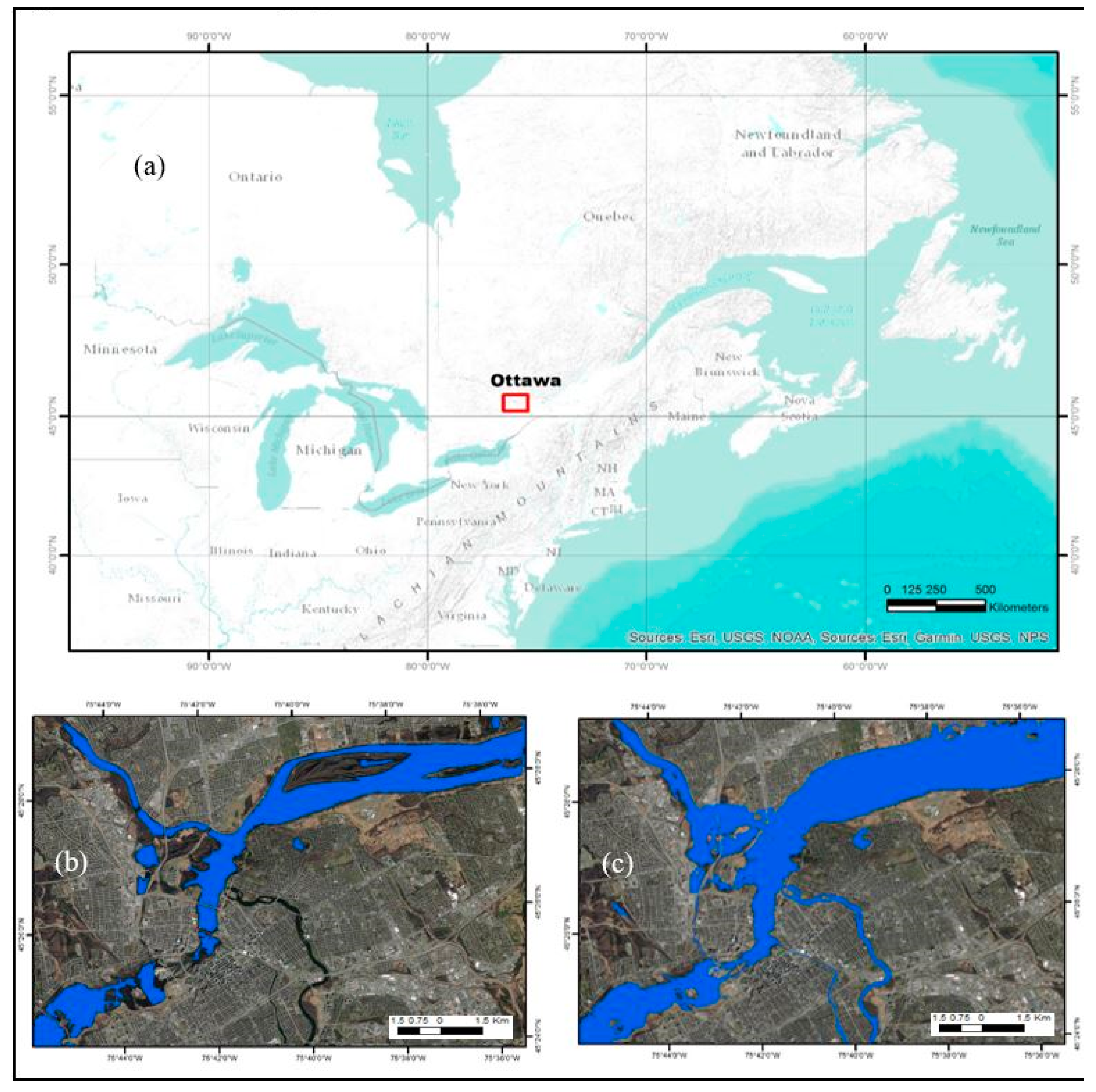
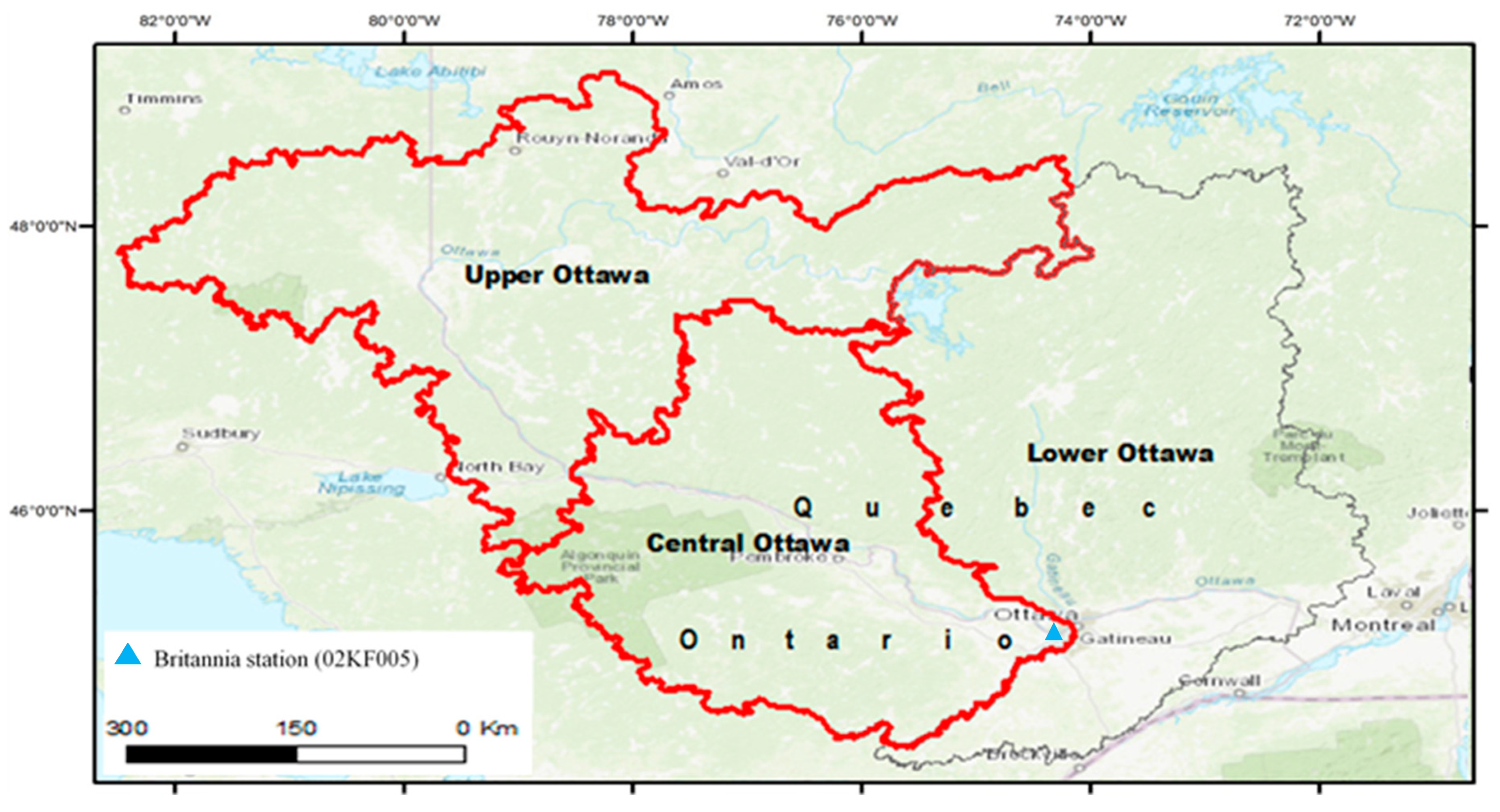
2.1. Study Area
2.2. Data
2.2.1. Precipitation Data
2.2.2. Air Temperature Data
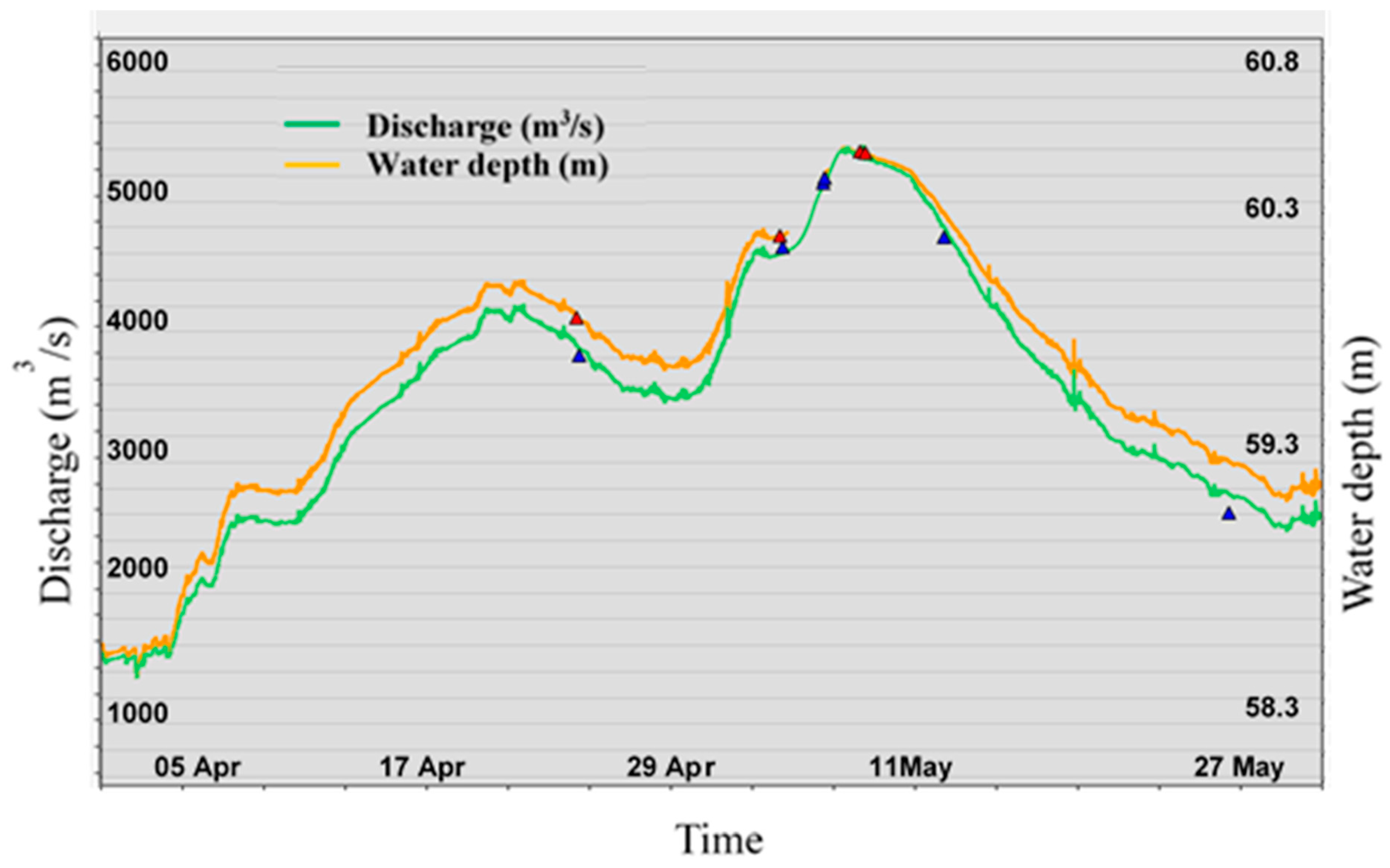
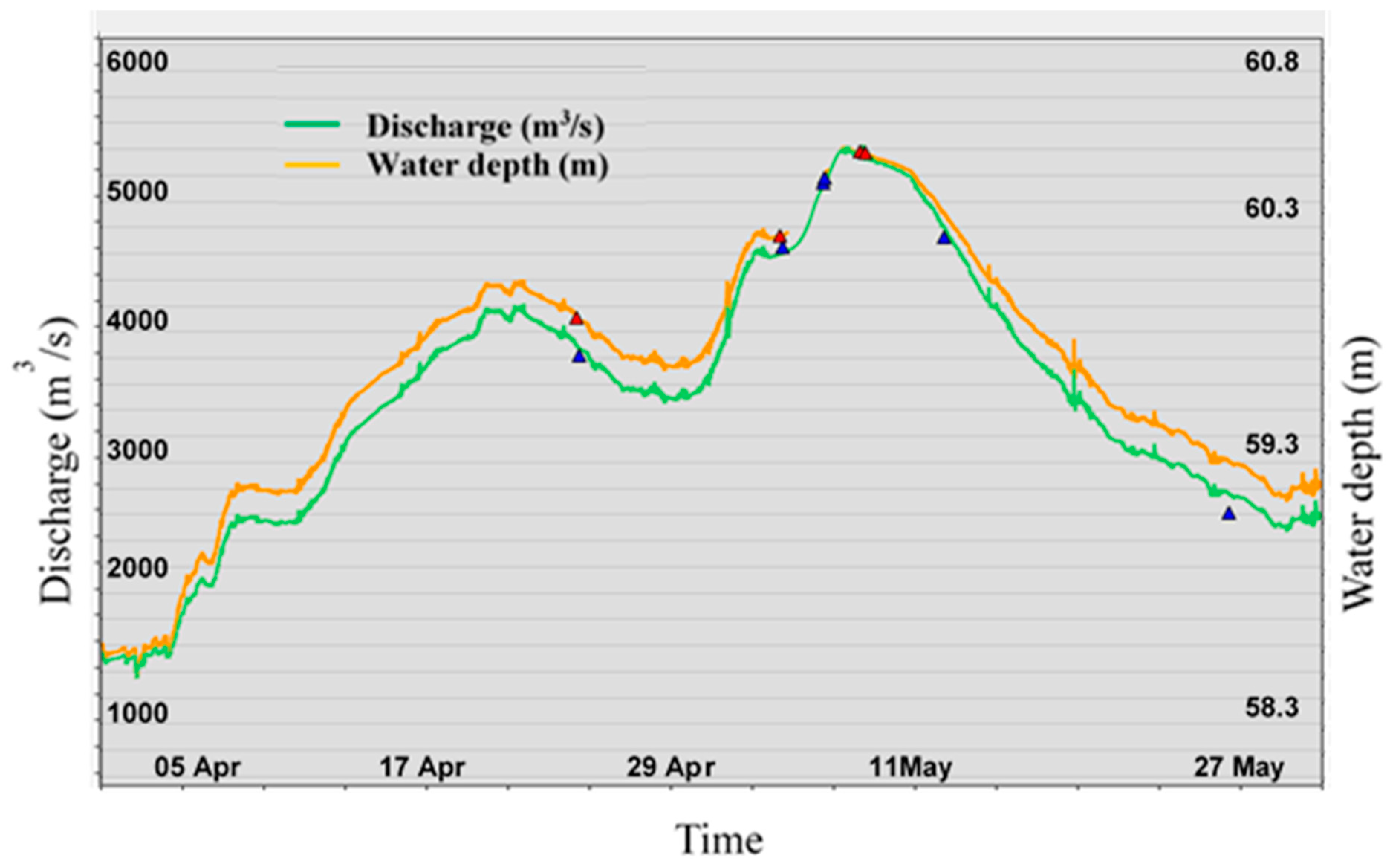
2.2.3. Observed Discharge Data
2.2.4. Geometric Data
2.2.5. Flow Data
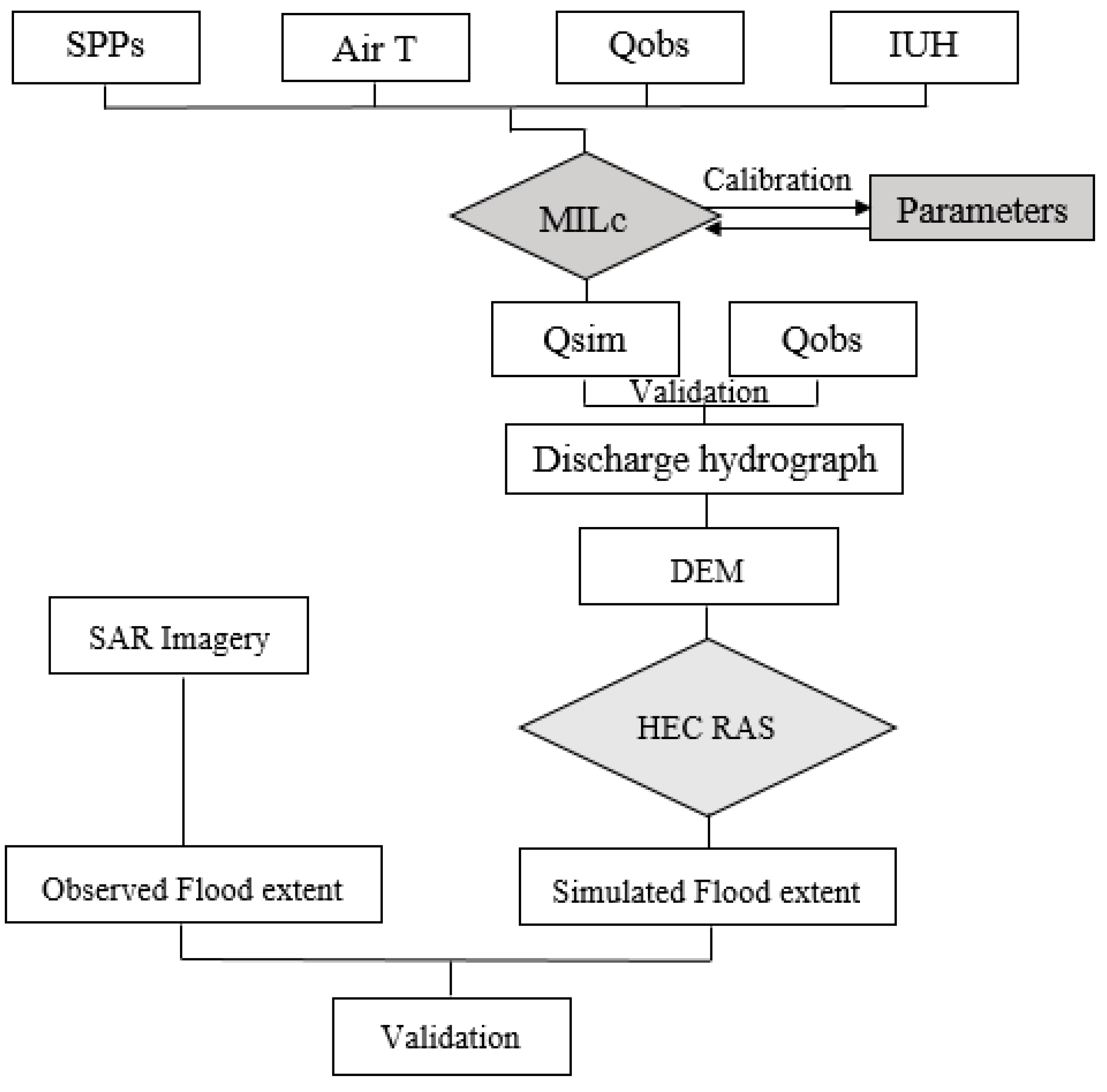
3. Methodology
3.1. Hydrological Forecasting in NTR
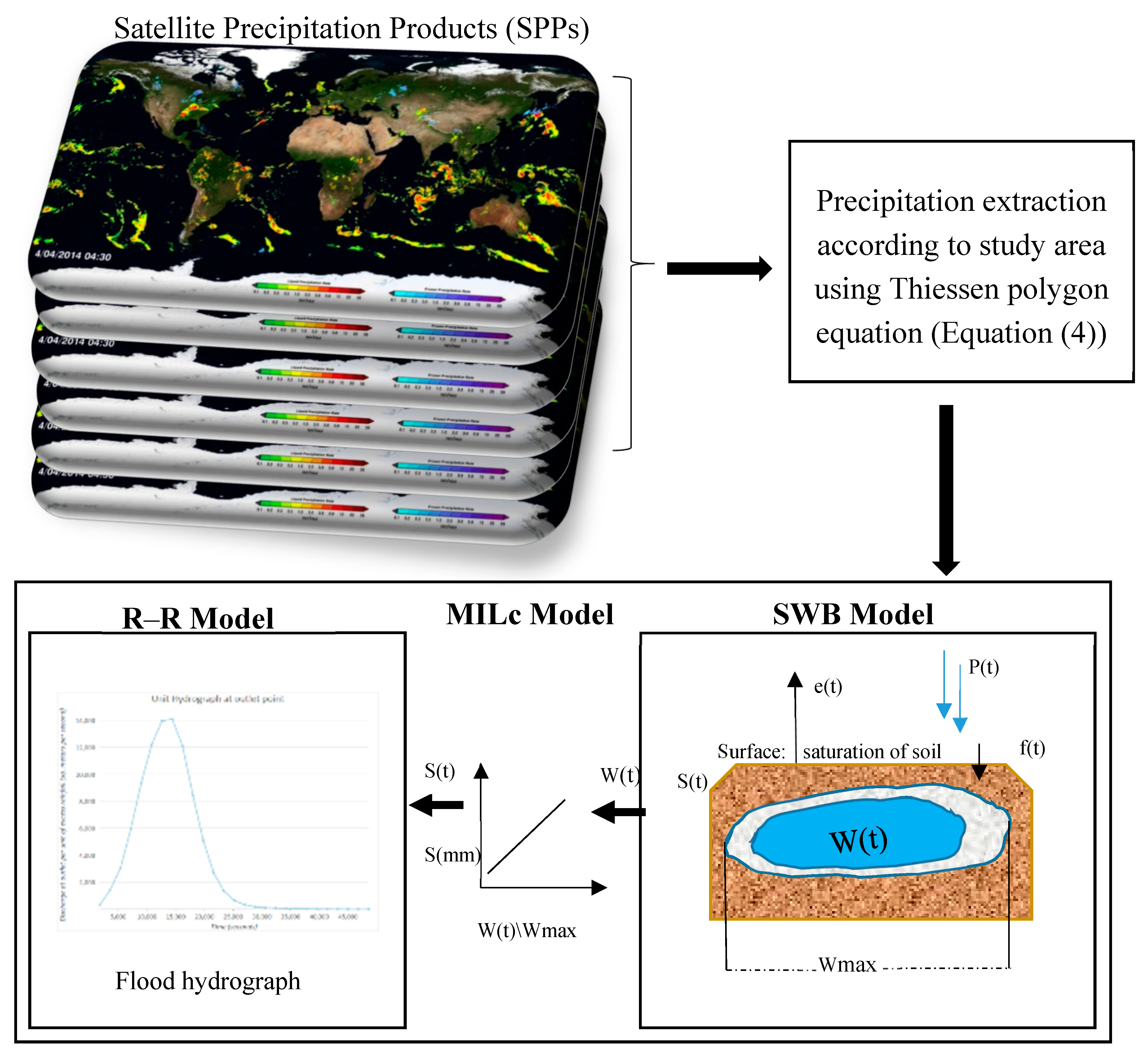
3.1.1. MILc Model
3.1.2. Model Adaptation to SPPs
3.1.3. Model Performance
3.2. Flood Mapping in NTR
3.3. Flood Mapping Assessment
3.4. Model Calibration
4. Results and Discussion
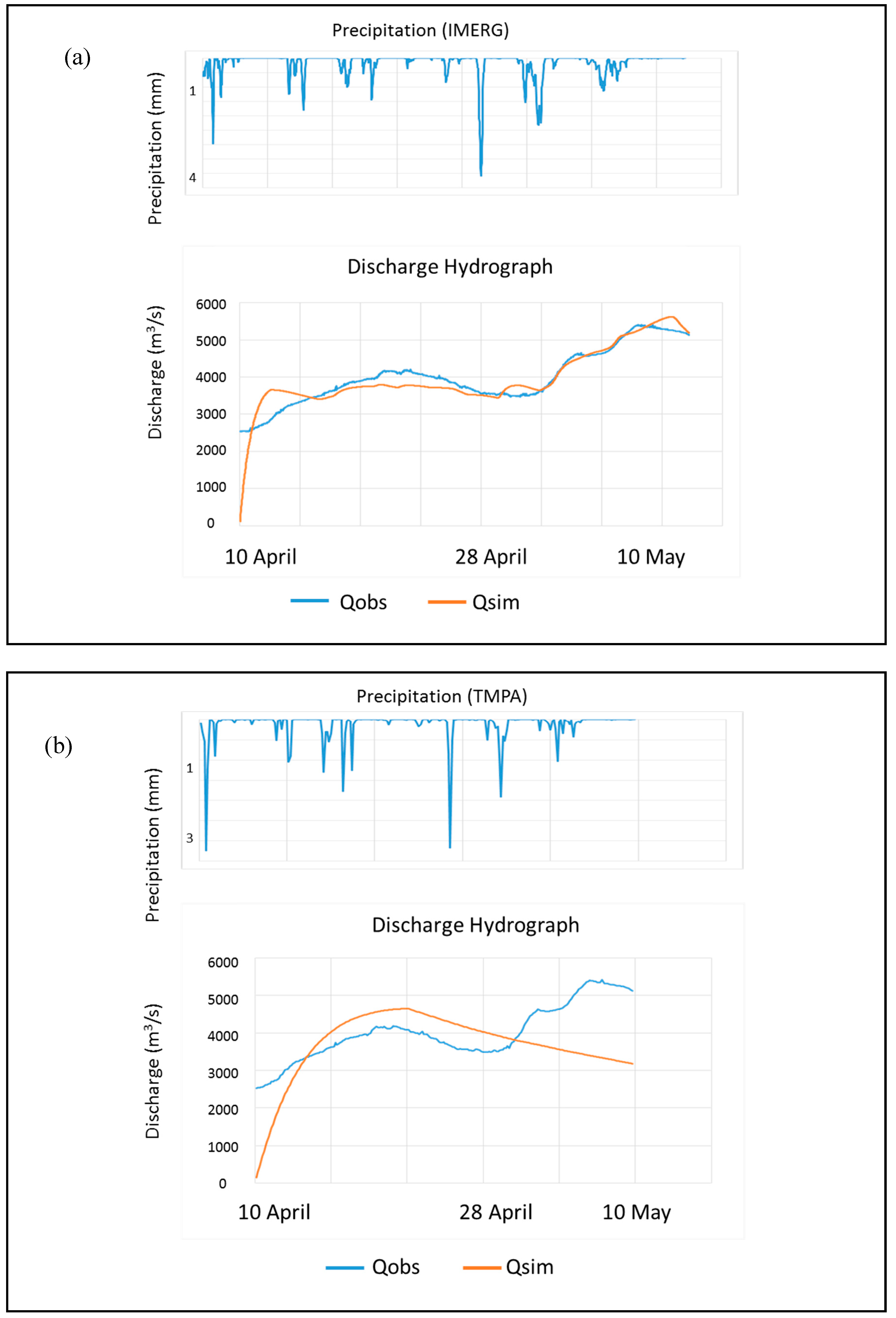
4.1. Hydrological Forecasting in NRT
Accuracy Assessment
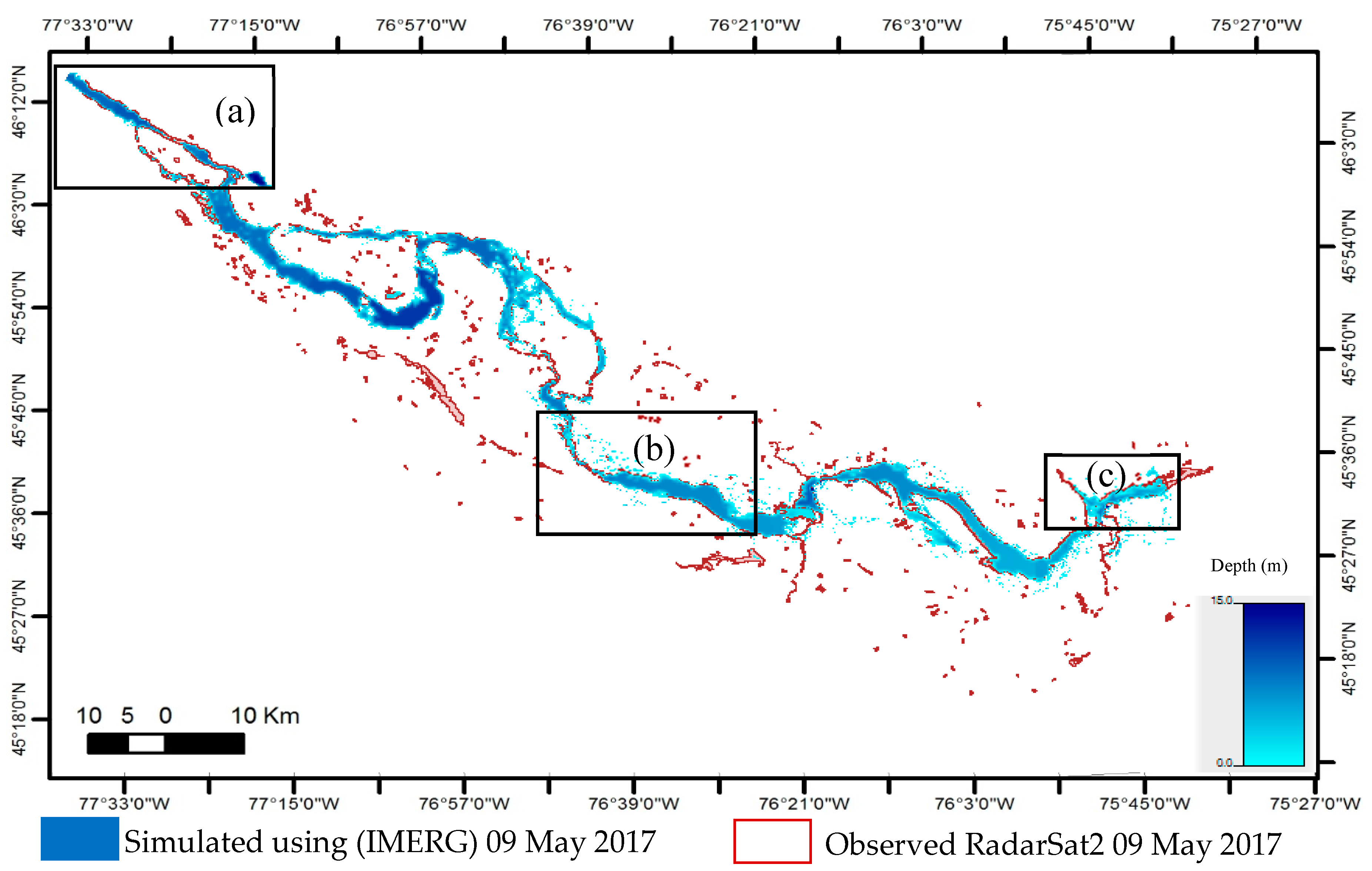
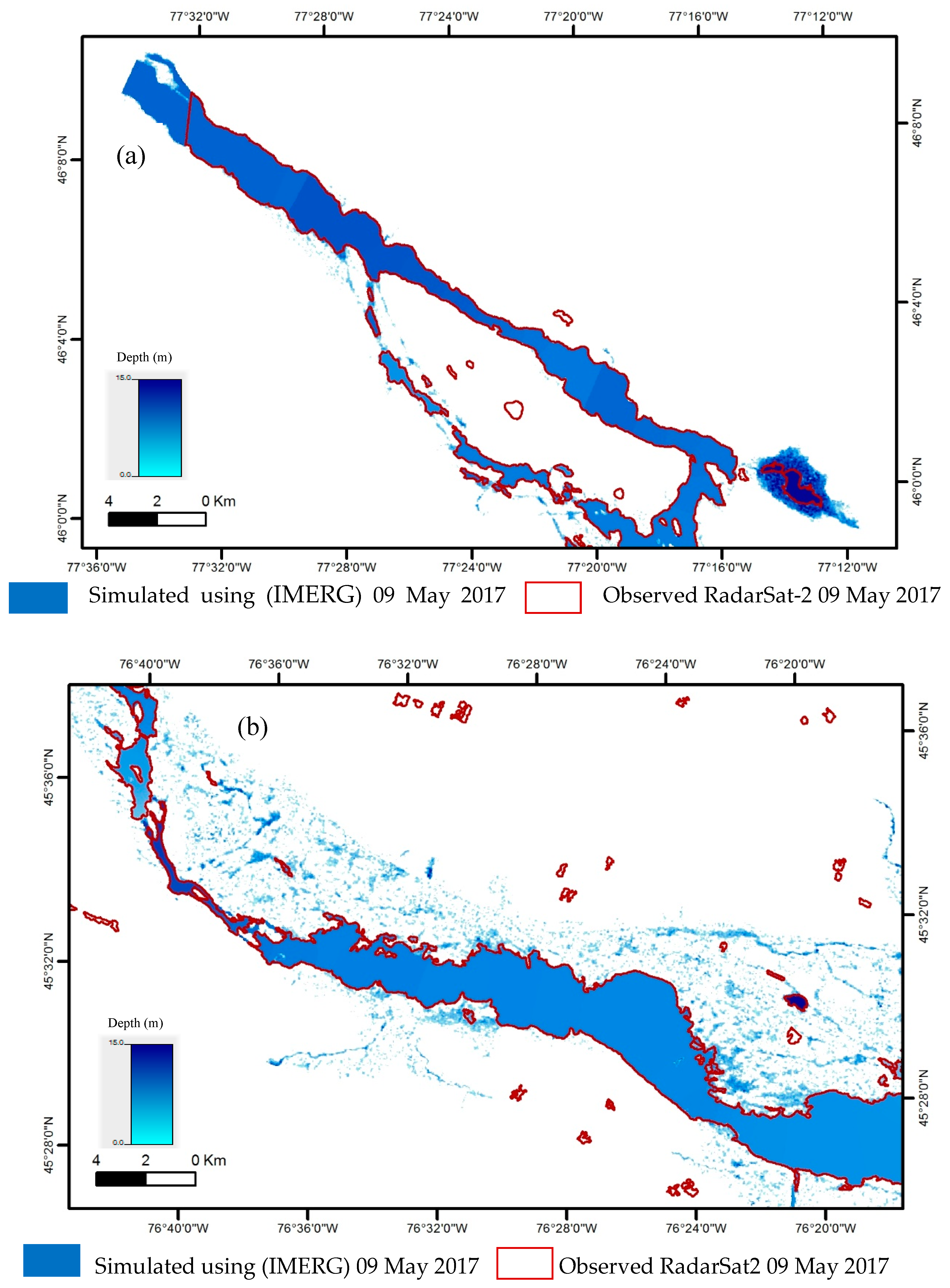
4.2. Flood Mapping in NRT
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Acronyms
| NRT | Near-real-time |
| SPPs | Satellite precipitation products |
| MILc | Modello Idrologico lumped in continuo |
| IMERG | Integrated multi-satellite retrievals for global precipitation measurement |
| TMPA | Tropical rainfall measurement mission multi-satellite precipitation analysis |
| NSE | Nash–Sutcliffe efficiency |
| ANSE | Adapted Nash–Sutcliffe efficiency |
| SAR | Synthetic aperture radar |
| IRPI | Istituto di Ricerca per la Protezione Idrogeologica |
| R–R | Rainfall–runoff |
| DEM | Digital elevation model |
| HEC-RAS | Hydrological Engineering Center River Analysis System |
| NRC | Natural Resources Canada |
| CMORPH | CPC MORPHing technique |
| PERSIANN | Precipitation estimation from remotely sensed information using artificial neural networks |
| TMI | Tropical rainfall measurement mission microwave imager |
| GMI | Global precipitation measurement microwave imager |
| NetCDF | Network common data form |
| SRTM | Shuttle radar topography mission |
| IUH | Instantaneous unit hydrograph |
| SWB | Soil–water balance |
| AWC | Antecedent wetness condition |
| USGS | United States Geological Survey |
References
- Teng, J.; Jakeman, A.J.; Vaze, J.; Croke, B.F.; Dutta, D.; Kim, S. Flood inundation modelling: A review of methods, recent advances and uncertainty analysis. Environ. Model. Softw. 2017, 90, 201–216. [Google Scholar] [CrossRef]
- Tarpanelli, A.; Amarnath, G.; Brocca, L.; Massari, C.; Moramarco, T. Discharge estimation and forecasting by MODIS and altimetry data in Niger-Benue River. Remote Sens. Environ. 2017, 195, 96–106. [Google Scholar] [CrossRef]
- United Nations Office for Disaster Risk Reduction (UNISDR). Centre for Research on the Epidemiology of Disasters (CRED). The Human Cost of Weather-Related Disasters 1995–2015. Available online: http://www.unisdr.org/2015/docs/climatechange/COP21 Weather Disasters Report 2015 FINAL.pdf (accessed on 9 March 2018).
- Kwak, Y.; Arifuzzanman, B.; Iwami, Y. Prompt proxy mapping of flood damaged rice fields using MODIS-derived indices. Remote Sens. 2015, 7, 15969–15988. [Google Scholar] [CrossRef]
- Revilla-Romero, B.; Hirpa, F.A.; Pozo, J.T.D.; Salamon, P.; Brakenridge, R.; Pappenberger, F.; de Groeve, T. On the use of global flood forecasts and satellite-derived inundation maps for flood monitoring in data-sparse regions. Remote Sens. 2015, 7, 15702–15728. [Google Scholar] [CrossRef]
- Giustarini, L.; Hostache, R.; Matgen, P. A change detection approach to flood mapping in urban areas using TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2417–2430. [Google Scholar] [CrossRef]
- Shrestha, R.; Di, L.; Eugene, G.Y.; Kang, L.; Shao, Y.Z.; Bai, Y.Q. Regression model to estimate flood impact on corn yield using MODIS NDVI and USDA cropland data layer. J. Integr. Agric. 2017, 16, 398–407. [Google Scholar] [CrossRef]
- World Meteorological Organization (WMO). Manual on Flood Forecasting and Warning. Available online: http://www.wmo.int/pages/prog/hwrp/.../flood_forecasting_warning/WMO%201072_en.pdf (accessed on 1 March 2018).
- Moradkhani, H.; Sorooshian, S. General review of rainfall-runoff modeling: Model calibration, data assimilation, and uncertainty analysis. In Hydrological Modelling and the Water Cycle; Springer: Berlin, Germany, 2009; pp. 1–24. [Google Scholar]
- Brocca, L.; Melone, F.; Moramarco, T. Distributed rainfall-runoff modelling for flood frequency estimation and flood forecasting. Hydrol. Process. 2011, 25, 2801–2813. [Google Scholar] [CrossRef]
- Brocca, L.; Liersch, S.; Melone, F.; Moramarco, T.; Volk, M. Application of a model-based rainfall-runoff database as efficient tool for flood risk management. Hydrol. Earth Syst. Sci. 2013, 17, 3159. [Google Scholar] [CrossRef]
- US Army Corps of Engineering. Hydrologic Engineering Center. 2D Modeling User’s Manual; US Army Corps of Engineering: Washington, DC, USA, 2016; Volume 5.
- International Charter: Space & Major Disasters. Flood Event in Canada. Available online: https://disasterscharter.org/web/guest/-/flood-in-canada-call-608 (accessed on 5 December 2017).
- Partnerships & Strategies Section Alberta Environment. Glossary of Terms Related to Water and Watershed Management in Alberta; Partnerships & Strategies Section Alberta Environment: Alberta, AB, Canada, 2008. [Google Scholar]
- Esri Canada Education. Water Survey of Canada. Upper, Central and Lower Ottawa Watershed Boundaries. Available online: https://www.arcgis.com/home/item.html?id=12b6e33d5a754c92b97ae5d0fed6940a (accessed on 9 December 2017).
- National Aeronautics and Space Administration (NASA). Global Precipitation Measurement Core Observatory. Available online: https://pmm.nasa.gov/sites/default/files/documentfiles/GPM%20Mission %20Brochure.pdf (accessed on 14 February 2018).
- Ciabatta, L.; Brocca, L.; Massari, C.; Moramarco, T.; Gabellani, S.; Puca, S.; Wagner, W. Rainfall-runoff modelling by using SM2RAIN-derived and state-of-the-art satellite rainfall products over Italy. Int. J. Appl. Earth Obs. Geoinf. 2016, 48, 163–173. [Google Scholar] [CrossRef]
- Hong, Y.; Hsu, K.L.; Moradkhani, H.; Sorooshian, S. Uncertainty quantification of satellite precipitation estimation and Monte Carlo assessment of the error propagation into hydrologic response. Water Resour. Res. 2006, 42. [Google Scholar] [CrossRef] [Green Version]
- National Aeronautics and Space Administration (NASA). GPM Microwave Imager Instrument for NASA and JAXA. Available online: https://pmm.nasa.gov/GPM (accessed on 14 February 2018).
- Natural Resources of Canada (NRC). Discharge and Air Temperature Data. Available online: https://eau.ec.gc.ca/report/ real_time_f.html (accessed on 10 January 2018).
- US Geological Survey (USGS). Digital Elevation Model Data. Available online: https://earthexplorer.usgs.gov (accessed on 2 January 2018).
- Kauffeldt, A.; Wetterhall, F.; Pappenberger, F.; Salamon, P.; Thielen, J. Technical review of large-scale hydrological models for implementation in operational flood forecasting schemes on continental level. Environ. Model. Softw. 2016, 75, 68–76. [Google Scholar] [CrossRef] [Green Version]
- Michel, C.; Andréassian, V.; Perrin, C. Soil conservation service curve number method: How to mend a wrong soil moisture accounting procedure? Water Resour. Res. 2005, 41. [Google Scholar] [CrossRef]
- Chow, K.W.; Ko, N.W.M.; Leung, R.C.K.; Tang, S.K. Inviscid two-dimensional vortex dynamics and a soliton expansion of the sinh-Poisson equation. Phys. Fluids 1998, 5, 1111–1119. [Google Scholar] [CrossRef]
- Goovaerts, P. Geostatistical approaches for incorporating elevation into the spatial interpolation of rainfall. J. Hydrol. 2000, 228, 113–129. [Google Scholar] [CrossRef] [Green Version]
- Krause, P.; Boyle, D.P.; Bäse, F. Comparison of different efficiency criteria for hydrological model assessment. Adv. Geosci. 2005, 5, 89–97. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Charter Request Description | Activation Information |
|---|---|
| Type of event | Flood |
| Location of event | Ottawa, Canada |
| Date of charter activation | 6 May 2017 |
| Time of charter activation | 14:59:00 |
| Time zone of charter activation | UTC-04:00 |
| Activation ID | 529 |
| Project management | Canadian Space Agency |
| Instrument | Temporal Resolution | Spatial Resolution | Coverage Area | Frequency Channels |
|---|---|---|---|---|
| GMI | Half hour | 0.1° | ±90° North-South latitude band | 10.6 GHz to 183 GHz |
| TMI | 3 h | 0.25° | ±50° North-South latitude band | 10.6 GHz to 85.5 GHz |
| Parameter | Description | Range |
|---|---|---|
| Wp | Initial conditions, fraction of Wmax | 0.5–1 (mm) |
| Wmax | Field capacity | 100–1000 (mm) |
| M2 | Exponent of drainage | 5–60 |
| Ks | Parameter of infiltration drainage | 0.01–20 (mm/h) |
| Nu | Fraction of drainage versus interflow | 0–1 |
| Gamma1 | Coefficient lag-time relationship | 0.5–6.5 |
| Kc | Parameter of potential evapotranspiration | 0.4–2 |
| Lambda | Initial abstraction coefficient | 0.0001–0.2 |
| Sr_coeff | Multiplicative for Sr | 1–4 |
| SPPs | NSE | ANSE |
|---|---|---|
| IMERG | 0.8039 | 0.8287 |
| TMPA | −0.9241 | −1.0028 |
| Profiles | Right Riverbank | Left Riverbank | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| S IMERG | S GDS | Obs | A Err | P Err | S IMERG | S GSD | Obs | A Err | P Err | |
| 1 | 166.77 | 166.77 | 171.11 | 4.34 | 0.04 | 1581,4 | 1581.4 | 1557.1 | 24.3 | 0.27 |
| 2 | 772.64 | 772.64 | 838.92 | 66.28 | 0.73 | 1745.8 | 1745.8 | 1731.2 | 14.6 | 0.16 |
| 3 | 82.7 | 113.4 | 201 | 118 | 1.3 | 1955.2 | 1955.2 | 1873.7 | 81.5 | 0.90 |
| 4 | 131.47 | 131.47 | 141.58 | 10.11 | 0.11 | 1690.9 | 1690.9 | 1651.2 | 39.7 | 0.44 |
| 5 | 120.73 | 120.73 | 171.09 | 50.39 | 0.55 | 913.1 | 913.1 | 936.1 | 23 | 0.25 |
| 6 | 152.75 | 152.75 | 157.85 | 5.1 | 0.05 | 526.32 | 495.18 | 452.28 | 74.04 | 0.82 |
| 7 | 125.75 | 125.75 | 183.37 | 57.62 | 0.64 | 1876.3 | 1876.3 | 1814.3 | 62 | 0.68 |
| 8 | 192.48 | 192.48 | 214.21 | 21.73 | 0.24 | 3675.4 | 3675.4 | 3694.6 | 19.2 | 0.21 |
| 9 | 691.51 | 691.51 | 554.49 | 137.02 | 1.52 | 3957.3 | 3957.3 | 3991.2 | 33.9 | 0.37 |
| 10 | 226.14 | 226.14 | 204.98 | 21.16 | 0.23 | 2261 | 2261 | 2256.9 | 4.1 | 0.04 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Belabid, N.; Zhao, F.; Brocca, L.; Huang, Y.; Tan, Y. Near-Real-Time Flood Forecasting Based on Satellite Precipitation Products. Remote Sens. 2019, 11, 252. https://doi.org/10.3390/rs11030252
Belabid N, Zhao F, Brocca L, Huang Y, Tan Y. Near-Real-Time Flood Forecasting Based on Satellite Precipitation Products. Remote Sensing. 2019; 11(3):252. https://doi.org/10.3390/rs11030252
Chicago/Turabian StyleBelabid, Nasreddine, Feng Zhao, Luca Brocca, Yanbo Huang, and Yumin Tan. 2019. "Near-Real-Time Flood Forecasting Based on Satellite Precipitation Products" Remote Sensing 11, no. 3: 252. https://doi.org/10.3390/rs11030252
APA StyleBelabid, N., Zhao, F., Brocca, L., Huang, Y., & Tan, Y. (2019). Near-Real-Time Flood Forecasting Based on Satellite Precipitation Products. Remote Sensing, 11(3), 252. https://doi.org/10.3390/rs11030252