Author Contributions
Conceptualization, S.N. and J.H.; methodology, S.N., J.H. and J.S.; software, D.F. and J.H.; validation, S.N.; formal analysis, J.H., J.S. and H.B.; data curation, J.L. and D.F.; writing—original draft preparation, S.N.; writing—review and editing, S.N., J.H., J.S. and H.B.; supervision, J.H.; project administration, S.N.; funding acquisition, S.N.
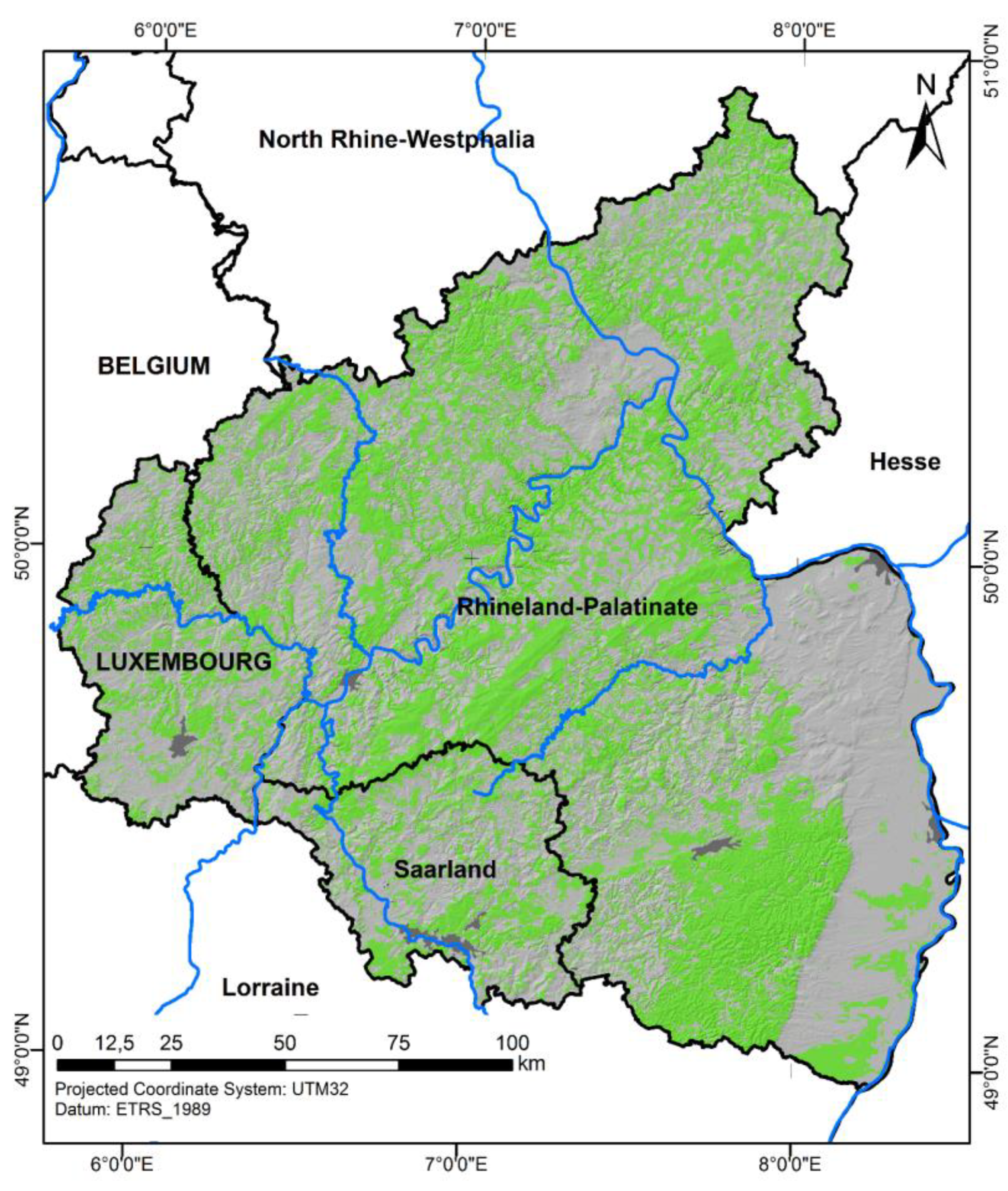
Figure 1.
Map of the study area. Forest areas based on cadastral data are depicted in light green.
Figure 1.
Map of the study area. Forest areas based on cadastral data are depicted in light green.
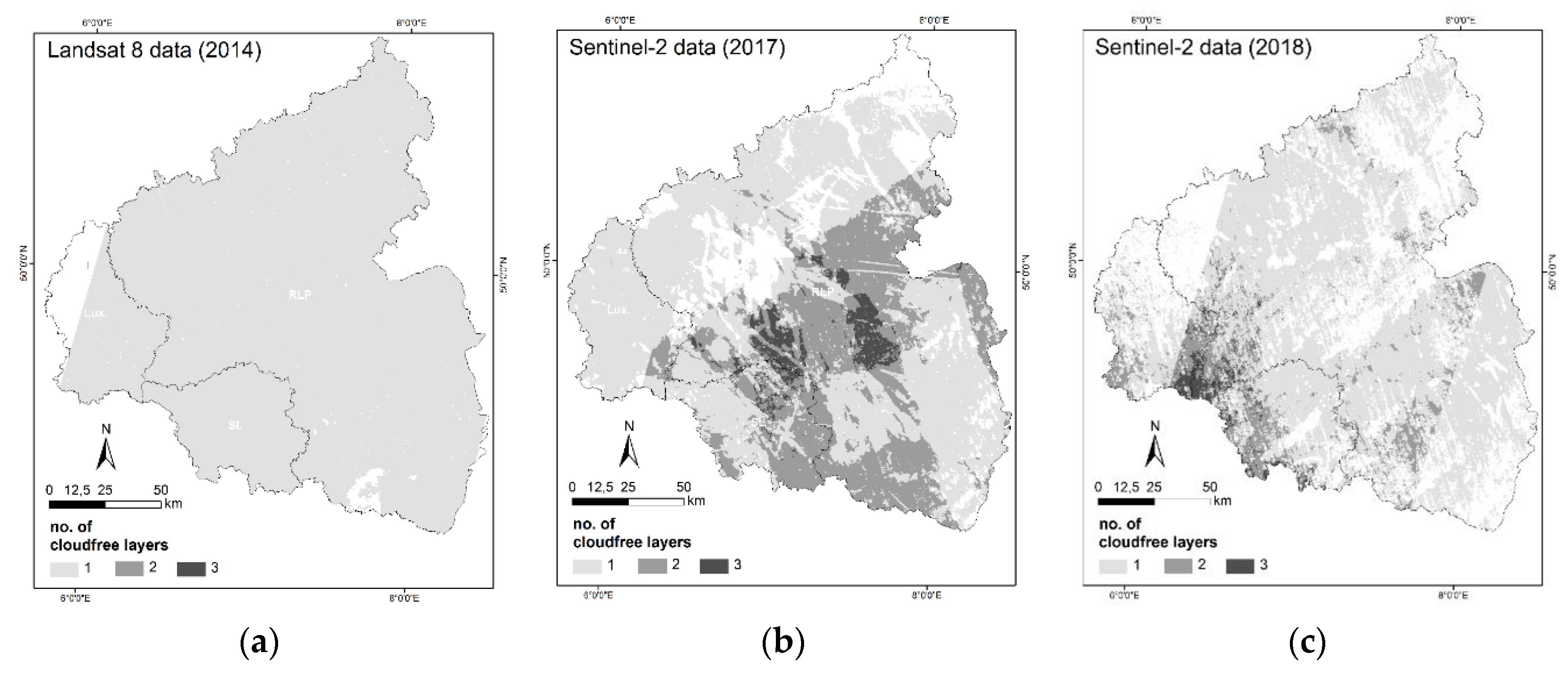
Figure 2.
Coverage of satellite data in 2014 (a), 2017 (b) and 2018 (c). White areas represent no data, light grey areas one, grey areas two and dark grey areas three image acquisitions in the respective year.
Figure 2.
Coverage of satellite data in 2014 (a), 2017 (b) and 2018 (c). White areas represent no data, light grey areas one, grey areas two and dark grey areas three image acquisitions in the respective year.
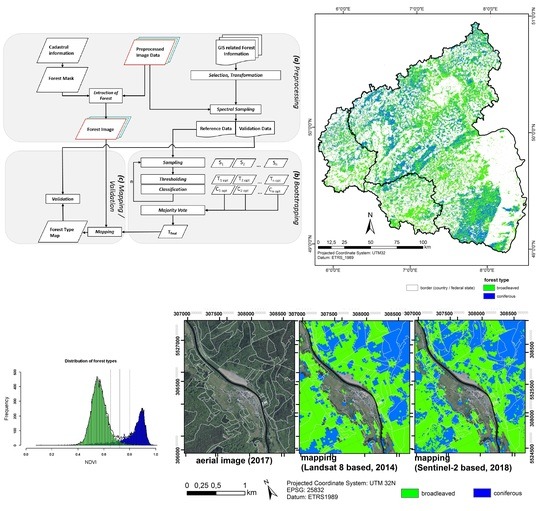
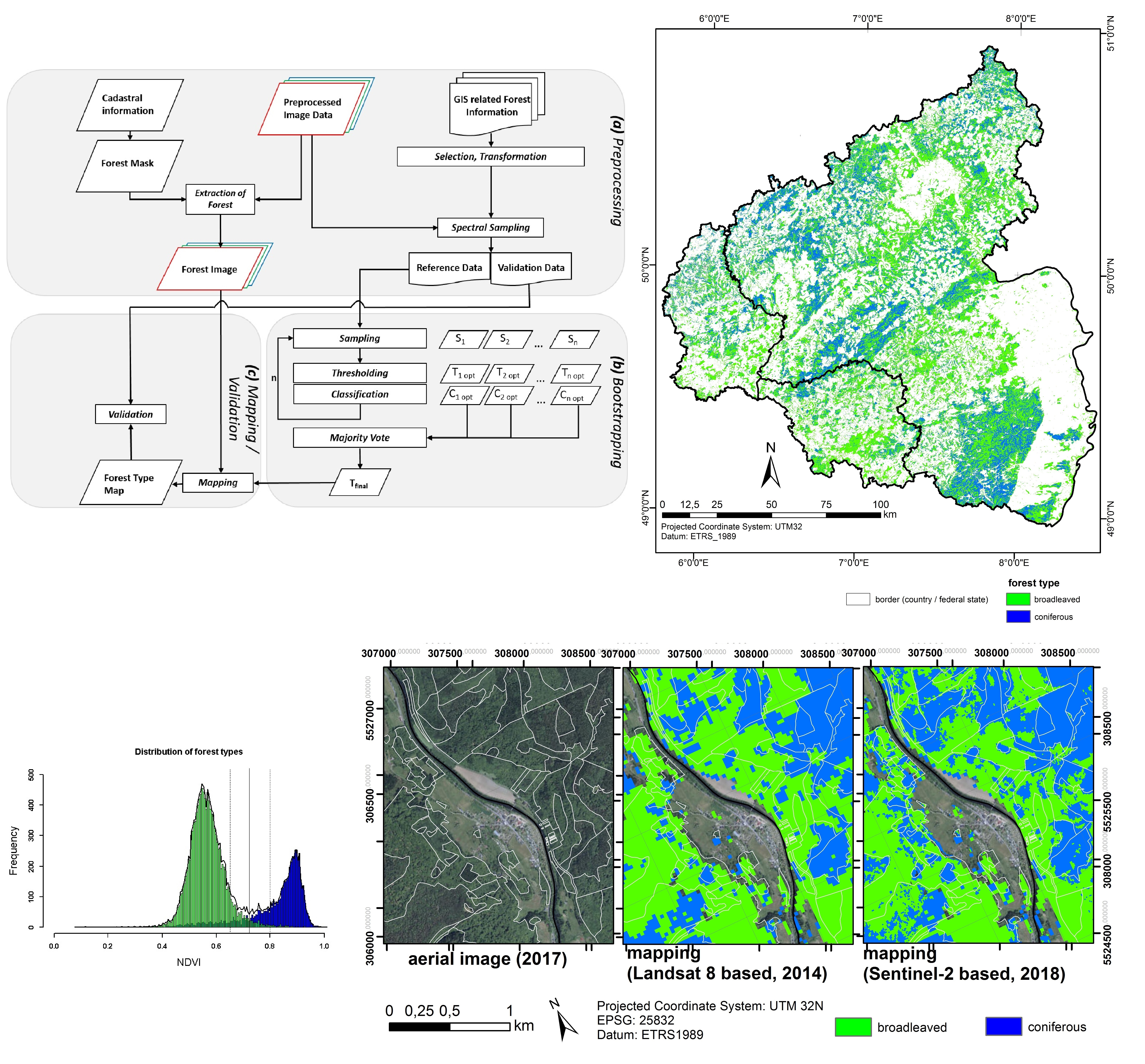
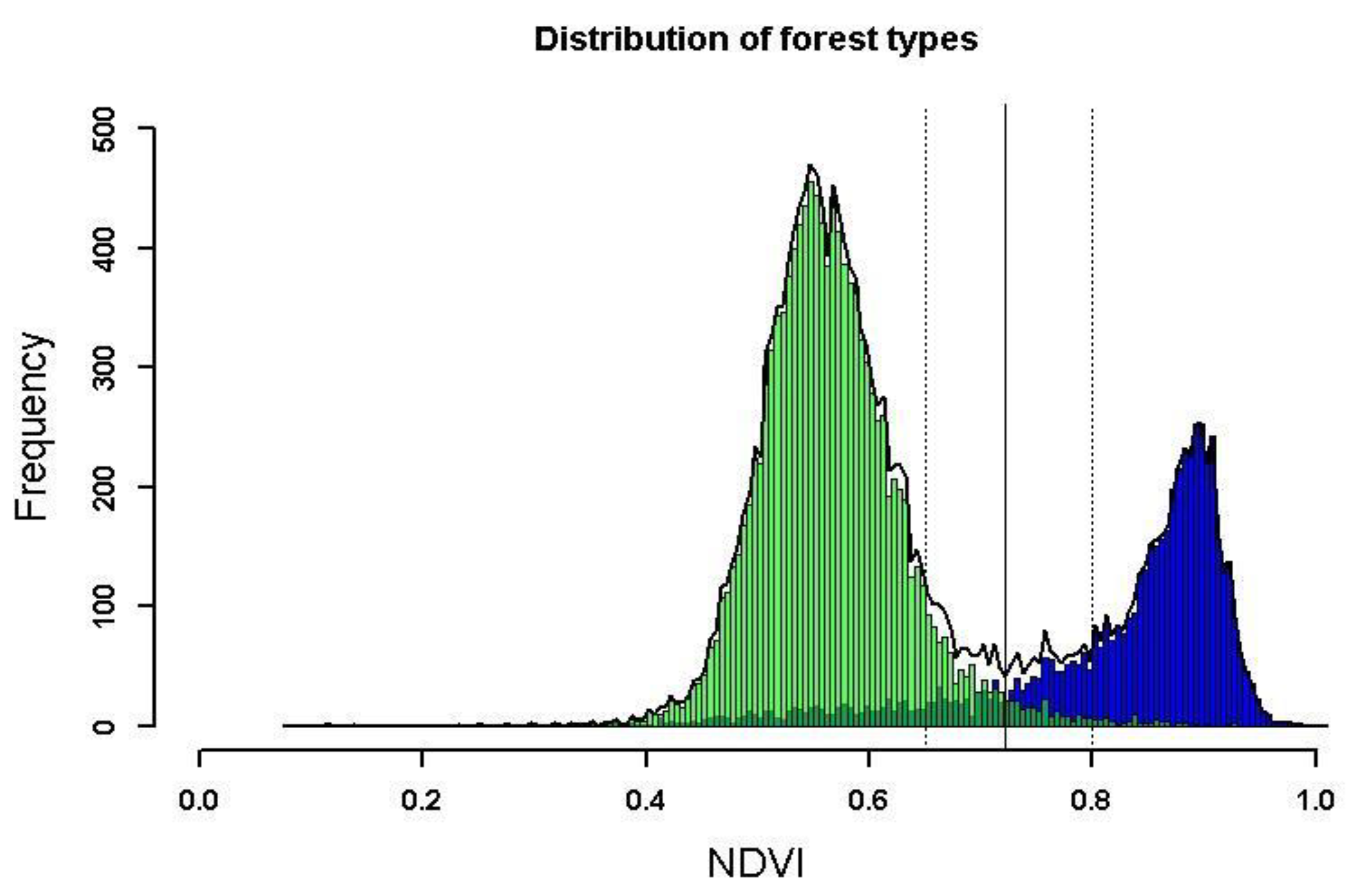
Figure 3.
Distribution of broadleaved (green) and coniferous (blue) tree species in the reference data extracted from the Landsat 8 image. The black line depicts the sum of both classes. The vertical black line indicates the minimum turning point, the vertical dotted lines the distance of one-half standard deviation in the dataset, which is used as range for threshold parameterization.
Figure 3.
Distribution of broadleaved (green) and coniferous (blue) tree species in the reference data extracted from the Landsat 8 image. The black line depicts the sum of both classes. The vertical black line indicates the minimum turning point, the vertical dotted lines the distance of one-half standard deviation in the dataset, which is used as range for threshold parameterization.
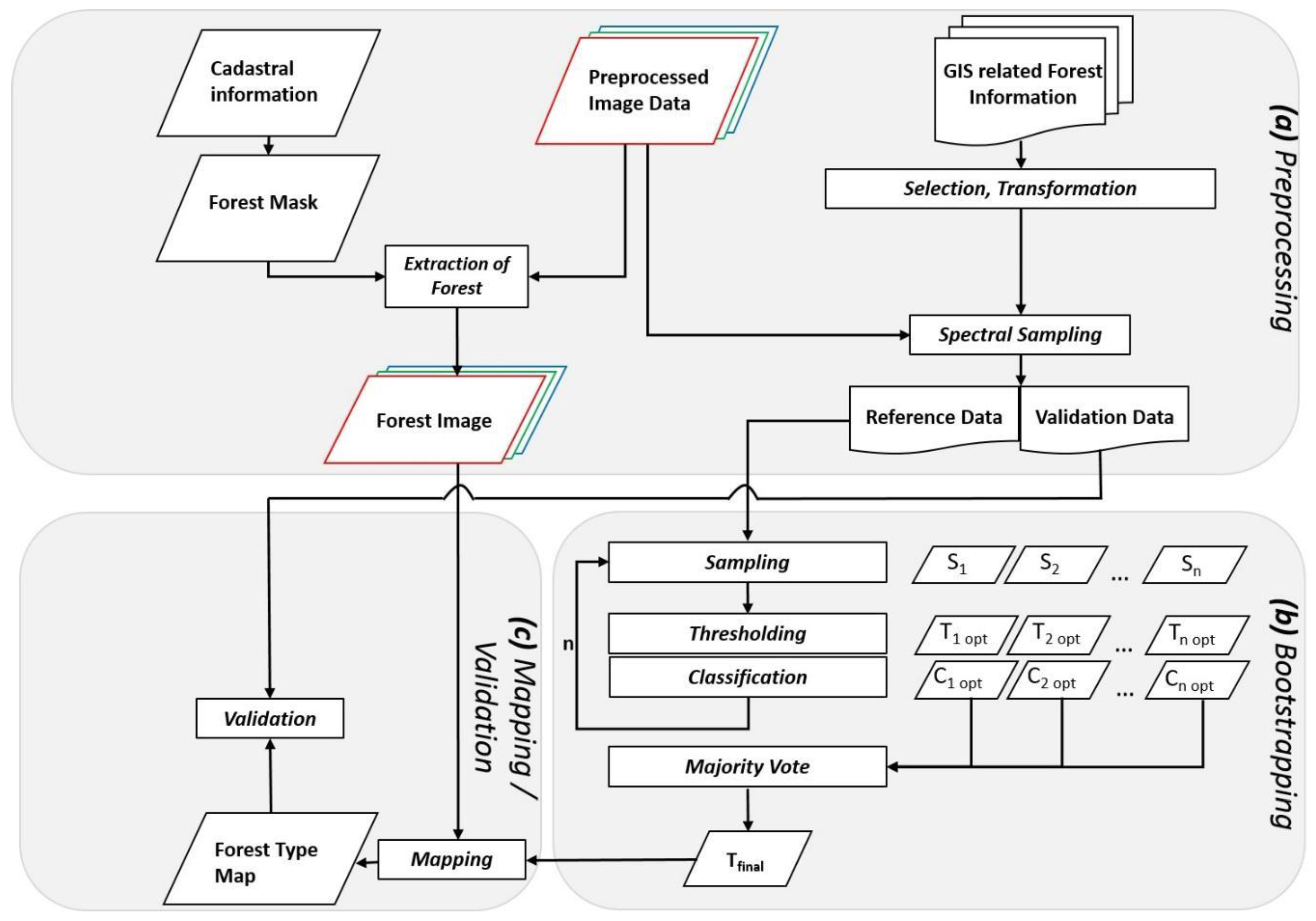
Figure 4.
Processing flowchart including the pre-processing part (a), the parameterization part based on the bootstrapping method (b) and the mapping and validation part (c).
Figure 4.
Processing flowchart including the pre-processing part (a), the parameterization part based on the bootstrapping method (b) and the mapping and validation part (c).
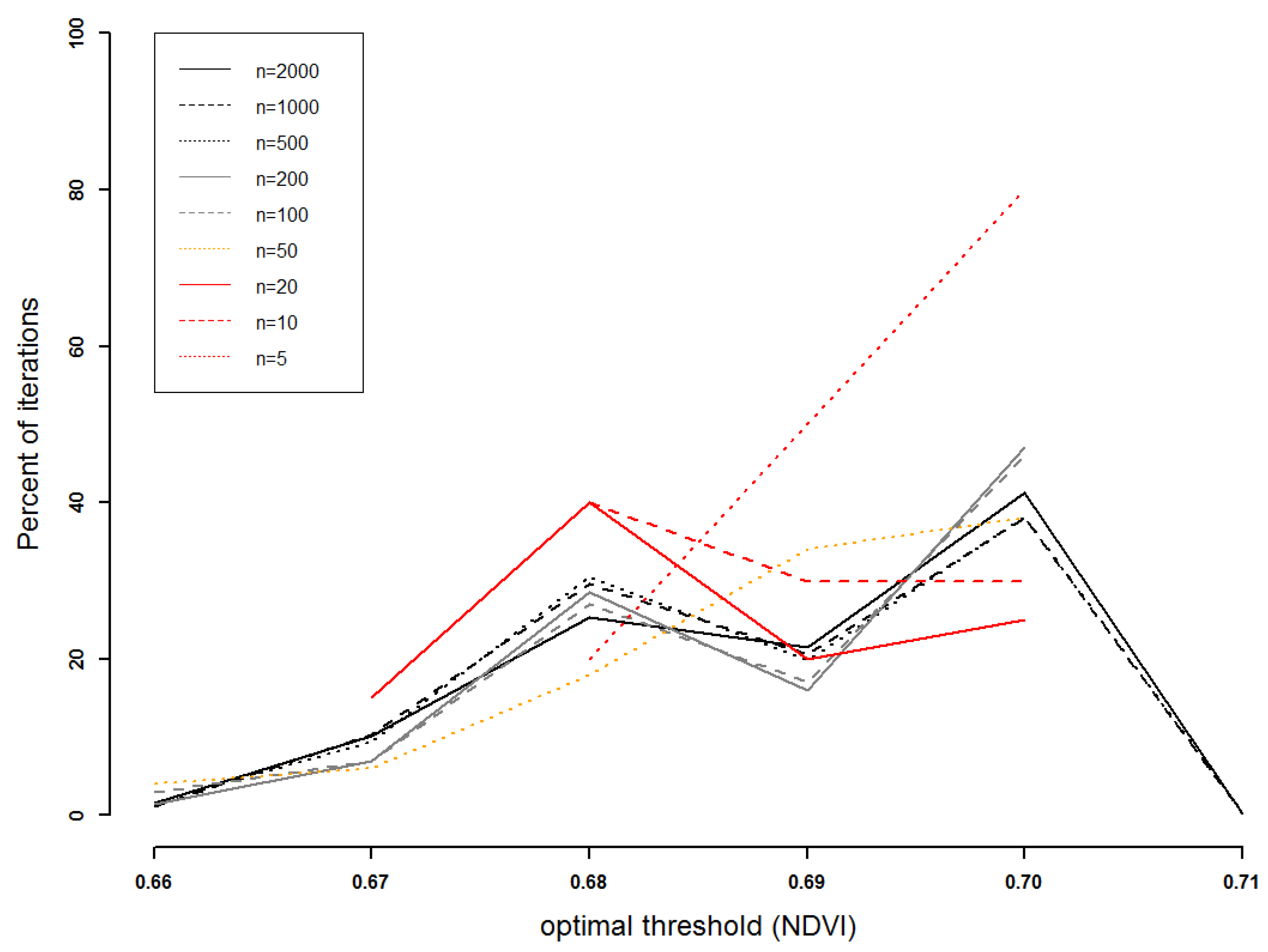
Figure 5.
The approximation of the optimal threshold for the separation of forest types is depending on the number of iterations. A stabilization occurs for more than 100 iterations.
Figure 5.
The approximation of the optimal threshold for the separation of forest types is depending on the number of iterations. A stabilization occurs for more than 100 iterations.
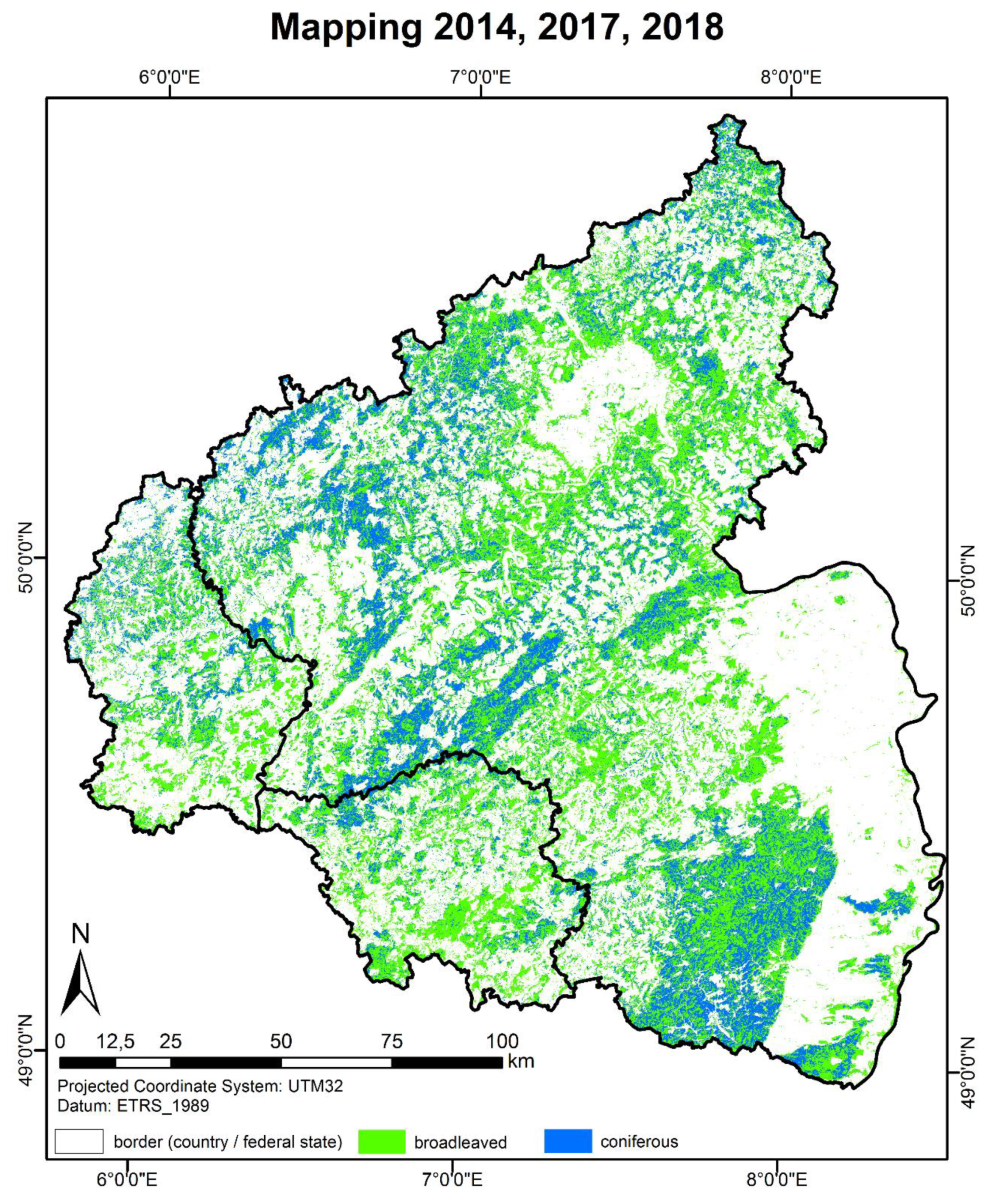
Figure 6.
Forest Type map based on Landsat 8 data from 2014, updated with Sentinel-2 imagery from 2017 and 2018.
Figure 6.
Forest Type map based on Landsat 8 data from 2014, updated with Sentinel-2 imagery from 2017 and 2018.
Figure 7.
Depiction of the spatially explicit and consistent transnational forest type mapping in the border region Luxembourg/RLP and comparison of the mapping based on Landsat-8 and Sentinel-2 imagery.
Figure 7.
Depiction of the spatially explicit and consistent transnational forest type mapping in the border region Luxembourg/RLP and comparison of the mapping based on Landsat-8 and Sentinel-2 imagery.
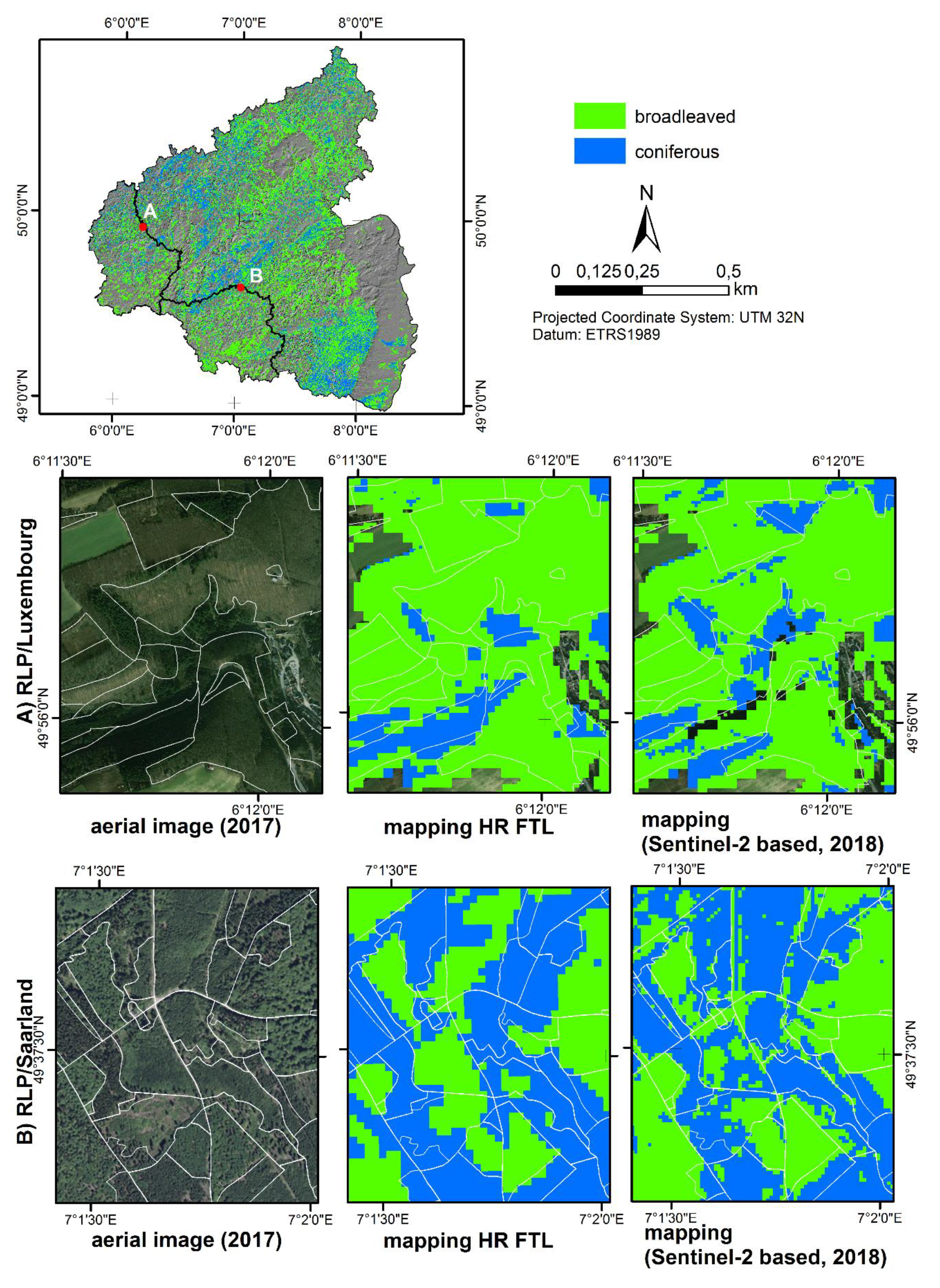
Figure 8.
Mapping of the Copernicus HR-FTL and the Sentinel-2 based prediction map in the border region of Luxembourg and RLP and the border region of RLP and the Saarland.
Figure 8.
Mapping of the Copernicus HR-FTL and the Sentinel-2 based prediction map in the border region of Luxembourg and RLP and the border region of RLP and the Saarland.
Table 1.
Overview of the forest cover and proportional forest cover considering the forest type.
Table 1.
Overview of the forest cover and proportional forest cover considering the forest type.
| | Area [km2] | Forest [km2] | Forest [%] | Broadleaved [%] | Coniferous [%] |
|---|
| RLP | 19,847 | 8388 | 42.26 | 62.03 | 37.97 |
| Saarland | 2570 | 946 | 36.81 | 73.49 | 26.51 |
| Luxembourg | 2586 | 940 | 36.21 | 67.64 | 32.36 |
| Total | 25003 | 10274 | 41.07 | 63.39 | 36.61 |
Table 2.
Overview and characteristics of the available forest information systems.
Table 2.
Overview and characteristics of the available forest information systems.
| Name | Country/Federal State | Type | No. of References | Acquisition Time |
|---|
| Forest Management Information (public forests) | Rhineland-Palatinate | Area-based | 15063 | 2003–2016 |
| Federal State Forest Inventory | Rhineland-Palatinate | Point-based | 5334 | 2010 |
| Forest Management Information (public forests) | Saarland | Area-based | 1210 | 2010 |
| Forest Management Information (private forests) | Saarland | Area-based | 911 | 2014 |
| projected FSFI Grid 1 | Saarland | Point-based | 349 | 2010–2014 |
| Forest Management Information | Luxembourg | Area-based | 697 | 2016 |
| National Forest Inventory 2 | Luxembourg | Point-based | 311 | 2010 |
Table 3.
List of satellite images used in the study.
Table 3.
List of satellite images used in the study.
| Sensor | Date of Acquisition | Cloud Coverage [%] | Forest in Footprint [ha] | Forest Coverage in Footprint [%] |
|---|
| Landsat 8 | 2014-03-27 | 1.00 | 9968 | 95.31 |
| Sentinel-2A | 2017-03-11 | 64.69 | 5705 | 21.22 |
| Sentinel-2A | 2017-03-14 | 42.11 | 7775 | 45.31 |
| Sentinel-2A | 2017-04-20 | 4.32 1 | 6931 | 5.95 1 |
| Sentinel-2B | 2018-03-14 | 75.44 | 3715 | 5.81 |
| Sentinel-2B | 2018-03-21 | 35.74 | 9068 | 48.59 |
| Sentinel-2B | 2018-03-24 | 89.42 | 5227 | 7.47 |
Table 4.
Suitable Vegetation Indices and its most important properties used for the mapping of forest types.
Table 4.
Suitable Vegetation Indices and its most important properties used for the mapping of forest types.
| Name | Equation | Properties | Reference |
|---|
| Simple Ratio | | Classic | [58] |
| Difference VI | | Classic | [54] |
| Normalized Difference VI | | Classic, normalized | [59] |
| Renormalized Difference VI | | Adjusted, compensates sun view geometry | [61] |
| Infrared Percentage VI | | Simplified NDVI | [62] |
| Soil Adjusted VI | | Soil, background adjusted; L = 0.5 | [60] |
| Atmospherically Resistant VI | | Atmospheric effects adjusted;
y = 1 | [50] |
| Soil and Atmospherically Resistant VI | | Combines adjustment of soil, background and atmospheric effects; L = 0.5 | [50] |
| Enhanced VI | | background and atmospheric effects | [63] |
Table 5.
Parameterization to receive the optimal threshold (area under the ROC curve) and comparison of the received OAA based on Landsat 8 and Sentinel-2 derived VIs.
Table 5.
Parameterization to receive the optimal threshold (area under the ROC curve) and comparison of the received OAA based on Landsat 8 and Sentinel-2 derived VIs.
| Index | Data Range | Parameterization | Validation |
|---|
| AUC | Threshold | OAA |
|---|
| L8 | S-2 | L8 | S-2 | L8 | S-2 |
|---|
| RLP | Saar | Lux | RLP | Saar | Lux |
|---|
| SR | 0–26 | 0.92 | 0.94 | 5.60 | 4.5 | 0.83 | 0.79 | 0.95 | 0.87 | 0.81 | 0.93 |
| DVI | 142–3290 | 0.69 | 0.78 | 1360 | 1280 | 0.64 | 0.65 | 0.64 | 0.74 | 0.73 | 0.77 |
| NDVI | 0.08–1 | 0.92 | 0.93 | 0.70 | 0.64 | 0.83 | 0.79 | 0.96 | 0.87 | 0.82 | 0.93 |
| RDVI | 4.98–51.5 | 0.87 | 0.89 | 30.00 | 28.2 | 0.78 | 0.75 | 0.79 | 0.84 | 0.81 | 0.87 |
| IPVI | 0.27–1 | 0.92 | 0.94 | 0.43 | 0.82 | 0.83 | 0.74 | 0.96 | 0.87 | 0.82 | 0.91 |
| SAVI | 0.12–1.51 | 0.93 | 0.92 | 1.04 | 0.96 | 0.83 | 0.78 | 0.94 | 0.87 | 0.82 | 0.92 |
| ARVI | 0.04–1.11 | 0.91 | 0.94 | 0.61 | 0.58 | 0.83 | 0.78 | 0.94 | 0.87 | 0.82 | 0.93 |
| SARVI | −0.1–2.3 | 0.92 | 0.94 | 0.91 | 0.88 | 0.83 | 0.78 | 0.93 | 0.87 | 0.82 | 0.93 |
| EVI | −22–74 | 0.90 | 0.93 | 1.80 | 1.95 | 0.80 | 0.76 | 0.89 | 0.85 | 0.79 | 0.92 |
Table 6.
Comparison of the mappings based on suitable Landsat 8 and Sentinel-2 VIs stratified by subregion. S(Area) reports the standard error for estimated area in hectares, S(OAA) for overall accuracy, S(UA) for the user’s and S(PA) for the producer’s accuracy; the subscript b stands for broadleaved and c for coniferous class.
Table 6.
Comparison of the mappings based on suitable Landsat 8 and Sentinel-2 VIs stratified by subregion. S(Area) reports the standard error for estimated area in hectares, S(OAA) for overall accuracy, S(UA) for the user’s and S(PA) for the producer’s accuracy; the subscript b stands for broadleaved and c for coniferous class.
| | | Landsat 8 (2014) | Sentinel-2 (2017/18) |
|---|
| | | Min | Max | Min | Max |
|---|
| S(Area)
| RLP | 1083 | 1835 | 1248 | 1851 |
| Saarland | 2341 | 2633 | 1696 | 2088 |
| Luxembourg | 4478 | 5697 | 3410 | 4746 |
| S(OAA) | RLP | 0.0167 | 0.0284 | 0.0157 | 0.0233 |
| Saarland | 0.0218 | 0.0245 | 0.0329 | 0.0242 |
| Luxembourg | 0.0055 | 0.0069 | 0.005 | 0.0069 |
| S(UAb) | RLP | 0.0093 | 0.0245 | 0.0118 | 0.0207 |
| Saarland | 0.023 | 0.0275 | 0.0208 | 0.0253 |
| Luxembourg | 0.0069 | 0.0086 | 0.0066 | 0.0086 |
| S(UAc) | RLP | 0.0564 | 0.0797 | 0.0426 | 0.0529 |
| Saarland | 0.0495 | 0.0573 | 0.0596 | 0.0656 |
| Luxembourg | 0.0088 | 0.0116 | 0.0074 | 0.0113 |
| S(PAb) | RLP | 0.0086 | 0.0178 | 0.0111 | 0.0166 |
| Saarland | 0.0201 | 0.0212 | 0.0182 | 0.0216 |
| Luxembourg | 0.0062 | 0.0065 | 0.0062 | 0.0069 |
| S(PAc) | RLP | 0.0441 | 0.0780 | 0.0383 | 0.0459 |
| Saarland | 0.0353 | 0.0406 | 0.0433 | 0.0481 |
| Luxembourg | 0.0068 | 0.0082 | 0.0061 | 0.0083 |
Table 7.
Error matrix of estimated proportions of area (bootstrap based prediction map using Sentinel-2 derived NDVI in RLP).
Table 7.
Error matrix of estimated proportions of area (bootstrap based prediction map using Sentinel-2 derived NDVI in RLP).
| | | Validation Data | | |
|---|
| | | Broadleaved | Coniferous | Total (Wi) | Area [ha] |
|---|
| Map | Broadleaved | 0.5387 | 0.0932 | 0.6320 | 563,158 |
| Coniferous | 0.0435 | 0.3245 | 0.3680 | 328,023 |
| | Total | 0.5823 | 0.4177 | 1 | 891,182 |
| | Area [ha] | 518,887 | 372,295 | | |
Table 8.
Error matrix of estimated proportions of area (bootstrap based prediction map using Sentinel-2 derived NDVI in the Saarland).
Table 8.
Error matrix of estimated proportions of area (bootstrap based prediction map using Sentinel-2 derived NDVI in the Saarland).
| | | Validation Data | | |
|---|
| | | Broadleaved | Coniferous | Total (Wi) | Area [ha] |
|---|
| Map | Broadleaved | 0.6803 | 0.0915 | 0.7718 | 88,278 |
| Coniferous | 0.0863 | 0.1419 | 0.2282 | 26,104 |
| | Total | 0.7665 | 0.2335 | 1 | 114,382 |
| | Area [ha] | 87,679 | 26,703 | | |
Table 9.
Error matrix of estimated proportions of area (bootstrap based prediction map using Sentinel-2 derived NDVI in Luxembourg).
Table 9.
Error matrix of estimated proportions of area (bootstrap based prediction map using Sentinel-2 derived NDVI in Luxembourg).
| | | Validation Data | | |
|---|
| | | Broadleaved | Coniferous | Total (Wi) | Area [ha] |
|---|
| Map | Broadleaved | 0.6543 | 0.0390 | 0.6933 | 66,950 |
| Coniferous | 0.0472 | 0.2595 | 0.3067 | 29,619 |
| | Total | 0.7015 | 0.2985 | 1 | 96,569 |
| | Area [ha] | 67,739 | 28,830 | | |
Table 10.
Error matrices of estimated proportions of area for the HR-FTL in RLP.
Table 10.
Error matrices of estimated proportions of area for the HR-FTL in RLP.
| | | Validation Data | | |
|---|
| | | Broadleaved | Coniferous | Total (Wi) | Area [ha] |
|---|
HR-
FTL | Broadleaved | 0.5522 | 0.0986 | 0.6509 | 613,760 |
| Coniferous | 0.0525 | 0.2966 | 0.3491 | 329,252 |
| | Total | 0.6047 | 0.3953 | 1 | 943,012 |
| | Area [ha] | 570,271 | 372,741 | | |
Table 11.
Error matrices of estimated proportions of area for the HR-FTL in the Saarland.
Table 11.
Error matrices of estimated proportions of area for the HR-FTL in the Saarland.
| | | Validation Data | | |
|---|
| | | Broadleaved | Coniferous | Total (Wi) | Area [ha] |
|---|
HR-
FTL | Broadleaved | 0.6440 | 0.1176 | 0.7617 | 95,531 |
| Coniferous | 0.0756 | 0.1628 | 0.2383 | 29,890 |
| | Total | 0.7196 | 0.2804 | 1 | 125,420 |
| | Area [ha] | 90,254 | 35,166 | | |
Table 12.
Error matrices of estimated proportions of area for the HR-FTL in Luxembourg.
Table 12.
Error matrices of estimated proportions of area for the HR-FTL in Luxembourg.
| | | Validation Data | | |
|---|
| | | Broadleaved | Coniferous | Total (Wi) | Area [ha] |
|---|
HR-
FTL | Broadleaved | 0.7099 | 0.0355 | 0.7454 | 75,404 |
| Coniferous | 0.0323 | 0.2223 | 0.2546 | 25,758 |
| | Total | 0.7422 | 0.2578 | 1 | 101,162 |
| | Area [ha] | 75,084 | 26,078 | | |
Table 13.
Validation of the HR-FTL and the mapping approach (Updated map based on the NDVI) reporting the OAA, user’s (UA) and producer’s accuracy (PA) for mapped broadleaved (subscript b) and coniferous forest (subscript c) in the three subregions.
Table 13.
Validation of the HR-FTL and the mapping approach (Updated map based on the NDVI) reporting the OAA, user’s (UA) and producer’s accuracy (PA) for mapped broadleaved (subscript b) and coniferous forest (subscript c) in the three subregions.
| | | OAA | UAb | UAc | PAb | PAc | Wb | Wc |
|---|
| RLP | FTL | 0.85 | 0.85 | 0.85 | 0.91 | 0.75 | 0.651 | 0.349 |
| Map | 0.86 | 0.85 | 0.88 | 0.93 | 0.78 | 0.631 | 0.368 |
| Saar | FTL | 0.81 | 0.85 | 0.68 | 0.89 | 0.58 | 0.762 | 0.238 |
| Map | 0.82 | 0.88 | 0.62 | 0.89 | 0.61 | 0.772 | 0.228 |
| Lux | FTL | 0.93 | 0.95 | 0.87 | 0.96 | 0.86 | 0.745 | 0.255 |
| Map | 0.92 | 0.95 | 0.85 | 0.93 | 0.88 | 0.693 | 0.307 |
Table 14.
Standard error for the mappings based on Landsat 8 and Sentinel-2 (NDVI) for each subregion. S(Area) reports the standard error for estimated area in hectares, S(OAA) for overall accuracy, S(UA) for the user’s and S(PA) for the producer’s accuracy; the subscript b stands for broadleaved, subscript c for coniferous class.
Table 14.
Standard error for the mappings based on Landsat 8 and Sentinel-2 (NDVI) for each subregion. S(Area) reports the standard error for estimated area in hectares, S(OAA) for overall accuracy, S(UA) for the user’s and S(PA) for the producer’s accuracy; the subscript b stands for broadleaved, subscript c for coniferous class.
| | | S(OAA)
| S(UAb) | S(UAc) | S(Area)
|
|---|
| RLP | FTL | 0.005 | 0.0063 | 0.0082 | 4696 |
| Map | 0.0048 | 0.0062 | 0.0074 | 4262 |
| Saar | FTL | 0.0211 | 0.0225 | 0.0517 | 2647 |
| Map | 0.02 | 0.0204 | 0.0539 | 2283 |
| Lux | FTL | 0.0150 | 0.0140 | 0.0423 | 1519 |
| Map | 0.0170 | 0.0147 | 0.0445 | 1644 |


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}