Soil Moisture Estimation by GNSS Multipath Signal


Abstract
:
1. Introduction
2. Methods
2.1. Retrieval of Signal-Noise Ratio Multipath Signal
2.2. Normalization of Signal-Noise Ratio Multipath Signal
2.3. Data Processing and Estimation Procedure
2.4. Introduction of Experiments Data
2.5. Method of Modelization
3. Experiments
3.1. PBO H2O Station Experiment
3.2. Wuhan Experiment
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, X.; Dick, G.; Lu, C.; Ge, M.; Nilsson, T.; Ning, T.; Schuh, H. Multi-GNSS Meteorology: Real-Time Retrieving of Atmospheric Water Vapor from BeiDou, Galileo, GLONASS, and GPS Observations. IEEE Geosci. Remote Sens. 2015, 53, 6385–6393. [Google Scholar] [CrossRef]
- Herring, T.A. Geodetic applications of GPS. Proc. IEEE 1999, 87, 92–110. [Google Scholar] [CrossRef]
- Qusen, C.; Weiping, J.; Xiaolin, M.; Peng, J.; Kaihua, W.; Yilin, X.; Jun, Y. Vertical deformation monitoring of the suspension bridge tower using gnss: A case study of the forth road bridge in the uk. Remote Sens. 2018, 10, 364. [Google Scholar]
- Hall, C.D.; Cordey, R.A. Multistatic Scatterometry. In Proceedings of the International Geoscience & Remote Sensing Symposium, Edinburgh, UK, 12–16 September 1988. [Google Scholar]
- Mashburn, J.; Axelrad, P.; Lowe, S.T.; Larson, K.M. Global ocean altimetry with gnss reflections from techdemosat-1. IEEE Geosci. Remote Sens. 2018, 56, 4088–4097. [Google Scholar] [CrossRef]
- Larson, K.M.; Ray, R.D.; Williams, S.D.P. A 10-year comparison of water levels measured with a geodetic gps receiver versus a conventional tide gauge. J. Atmos. Ocean. Tech. 2017, 34, 295–307. [Google Scholar] [CrossRef]
- Mashburn, J.; Axelrad, P.; Lowe, S.T.; Larson, K.M. An assessment of the precision and accuracy of altimetry retrievals for a monterey bay gnss-r experiment. IEEE J-STARS 2016, 9, 1–9. [Google Scholar] [CrossRef]
- Alonso-Arroyo, A.; Camps, A.; Park, H.; Pascual, D.; Onrubia, R.; Martin, F. Retrieval of significant wave height and mean sea surface level using the gnss-r interference pattern technique: Results from a three-month field campaign. IEEE Geosci. Remote Sens. 2015, 53, 3198–3209. [Google Scholar] [CrossRef]
- Cong, Y.; Yun-Chang, C.; Bin, Z.; Ming-Li, L.I.; Hong-Jia, W.U.; Wei-Hua, L. Application of significant wave height measurement using GNSS-R signals. J. Oper. Oceanogr. 2012, 31, 36–40. [Google Scholar]
- Xin, W.; Qiang, S.; XunXie, Z.; DaRen, L.; LianJun, S.; Xiong, H.; Soulat, F. First China ocean reflection experiment using coastal GNSS-R. Chinse Sci. Bull. 2008, 53, 1117–1120. [Google Scholar] [CrossRef] [Green Version]
- Yu, K. Tsunami-Wave Parameter Estimation Using GNSS-Based Sea Surface Height Measurement. IEEE Geosci. Remote Sens. 2015, 53, 2603–2611. [Google Scholar] [CrossRef]
- Yu, K. Simplified Tsunami Modelling and Waveform Reconstruction with GNSS-R Observations. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1470–1484. [Google Scholar] [CrossRef]
- Yu, K. Tsunami lead wave reconstruction based on noisy sea surface height measurements. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Prague, Czech Republic, 12–19 July 2016; pp. 525–528. [Google Scholar]
- Rodriguez-Alvarez, N.; Aguasca, A.; Valencia, E.; Bosch-Lluis, X.; Ramos-Pérez, I.; Park, H.; Vall-Llossera, M. Snow monitoring using GNSS-R techniques. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 4375–4378. [Google Scholar]
- Cardellach, E.; Fabra, F.; Rius, A.; Pettinato, S.; D’Addio, S. Characterization of drysnow sub-structure using GNSS reflected signals. Remote Sens. Environ. 2012, 124, 122–134. [Google Scholar] [CrossRef]
- Masters, D.S. Surface Remote Sensing Applications of GNSS Bistatic Radar: Soil Moisture and Aircraft Altimetry; University of Colorado: Boulder, CO, USA, 2004. [Google Scholar]
- Ferrazzoli, P.; Guerriero, L.; Pierdicca, N.; Rahmoune, R. Forest biomass monitoring with GNSS-R: Theoretical simulations. Adv. Space Res. 2011, 47, 1823–1832. [Google Scholar] [CrossRef]
- Camps, A.; Aguasca, A.; Park, H.; Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Vall-Llossera, M.; Ramos-Perez, I.; Valencia, E. Review of crop growth and soil moisture monitoring from a ground-based instrument implementing the Interference Pattern GNSS-R Technique. Radio Sci. 2011, 46. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Camps, A.; Ramos-Perez, I.; Valencia, E.; Park, H.; Vall-Llossera, M. Vegetation water content estimation using gnss measurements. IEEE Geosci. Remote Sens Lett. 2012, 9, 282–286. [Google Scholar] [CrossRef]
- Dobson, M.C.; Ulaby, F.T.; Hallikainen, M.T.; El-Rayes, M.A. Microwave Dielectric Behavior of wet soil-Part I: Empirical Models and experimental observations. IEEE Geosci. Remote Sens. 1985, 23, 35–46. [Google Scholar] [CrossRef]
- Chew, C.C.; Small, E.E.; Larson, K.M.; Zavorotny, V.U. Vegetation sensing using gps-interferometric reflectometry: Theoretical effects of canopy parameters on signal-to-noise ratio data. IEEE Geosci. Remote Sens. 2015, 53, 2755–2764. [Google Scholar] [CrossRef]
- Chew, C.C.; Small, E.E.; Larson, K.M.; Zavorotny, V.U. Effects of near-surface soil moisture on gps snr data: Development of a retrieval algorithm for soil moisture. IEEE Geosci. Remote Sens. 2014, 52, 537–543. [Google Scholar] [CrossRef]
- Zavorotny, V.; Masters, D.; Gasiewski, A.; Bartram, B.; Katzberg, S.; Axelrad, P.; Zamora, R. Seasonal polarimetric measurements of soil mois-ture using tower-based GPS bistatic radar. IEEE Geosci. Remote Sens. 2003, 2, 781–783. [Google Scholar]
- Masters, D.; Axelrad, P.; Katzberg, S. Initial results of land-reflected GPS bistatic radar measurements in SMEX02. Remote Sens. Environ. 2004, 92, 507–520. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E.; Gutmann, E.; Bilich, A.; Axelrad, P.; Braun, J. Using gps multipath to measure soil moisture fluctuations: Initial results. GPS Solut. 2008, 12, 173–177. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E.; Gutmann, E.D.; Bilich, A.L. Use of gps receivers as a soil moisture network for water cycle studies. Geophys. Res. Lett. 2008, 35, 851–854. [Google Scholar] [CrossRef]
- Larson, K.M.; Braun, J.J.; Small, E.E.; Zavorotny, V.U.; Gutmann, E.D.; Bilich, A.L. Gps multipath and its relation to near-surface soil moisture content. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 91–99. [Google Scholar] [CrossRef]
- Yan, S.; Li, Z.; Yu, K.; Zhang, K. GPS-R L1 interference signal processing for soil moisture estimation: An experimental study. Eurasip J. Adv. Signal Process. 2014, 2014, 107. [Google Scholar] [CrossRef]
- Wu, X.; Jin, S. Simulations and analysis of BeiDou navigation satellite system (BDS)-Relectometry delay-Doppler maps for vegetation. China Satellite Navigat. Conf. 2014, 1, 87–95. [Google Scholar]
- Luo, X.; Yan, S.; Shan, J.; Yan, H.; Wang, H. Using the BDS-R signal for soil moisture estimation. China Satellite Navigat. Conf. 2016, 1, 175–185. [Google Scholar]
- Ban, W.; Yu, K.; Zhang, X. GEO-Satellite-Based Reflectometry for Soil Moisture Estimation: Signal Modeling and Algorithm Development. IEEE Trans. Geosci. Remote Sens. 2017, 56, 1829–1838. [Google Scholar] [CrossRef]
- Wan, W.; Larson, K.M.; Small, E.E.; Chew, C.C.; Braun, J.J. Using geodetic gps receivers to measure vegetation water content. GPS Solut. 2015, 19, 237–248. [Google Scholar] [CrossRef]
- Bilich, A.; Larson, K.M.; Axelrad, P. Modeling gps phase multipath with snr: Case study from the salar de uyuni, boliva. J. Geophys. Res. 2008, 113, 113. [Google Scholar] [CrossRef]
- Ray, J.K.; Cannon, M.E. Synergy between global positioning system code, carrier, and signal-to-noise ratio multipath errors. J. Guid. Control Dynam. 2001, 24, 54–63. [Google Scholar] [CrossRef]
- Reichert, A.; Axelrad, P. Gps carrier phase multipath reduction using snr measurements to characterize an 41effective reflector. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation, Nashville, TN, USA, 14–17 September 1999; pp. 1951–1960. [Google Scholar]
- Comp, C.; Axelrad, P. Adaptive snr-based carrier phase multipath mitigation technique. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 264–276. [Google Scholar] [CrossRef]
- Bilich, A.; Larson, K.M. Mapping the gps multipath environment using the signal-to-noise ratio (snr). Radio Sci. 2007, 42, 42. [Google Scholar] [CrossRef]
- Yu, K.; Ban, W.; Zhang, X.; Yang, X. Snow depth estimation based on multipath phase combination of gps triple-frequency signals. IEEE Geosci. Remote Sens. 2015, 53, 5100–5109. [Google Scholar] [CrossRef]
- Yu, K.; Li, Y.; Chang, X. Snow depth estimation based on combination of pseudorange and carrier phase of gnss dual-frequency signals. IEEE Geosci. Remote Sens. 2018, 57, 1817–1828. [Google Scholar] [CrossRef]
- Li, Y.; Chang, X.; Yu, K.; Wang, S.; Li, J. Estimation of snow depth using pseudorange and carrier phase observations of GNSS single-frequency signal. GPS Solut. 2019, 23, 118. [Google Scholar] [CrossRef]
- Nievinski, F.G.; Larson, K.M. Forward modeling of gps multipath for near-surface reflectometry and positioning applications. GPS Solut. 2014, 18, 309–322. [Google Scholar] [CrossRef]
- Chew, C.; Small, E.E.; Larson, K.M. An algorithm for soil moisture estimation using gps-interferometric reflectometry for bare and vegetated soil. GPS Solut. 2016, 20, 525–537. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
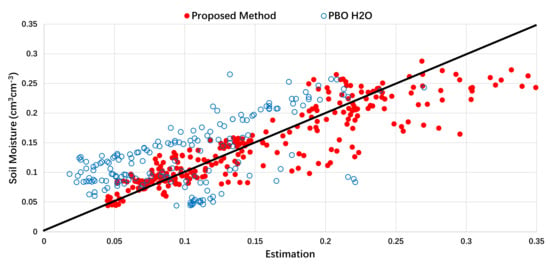
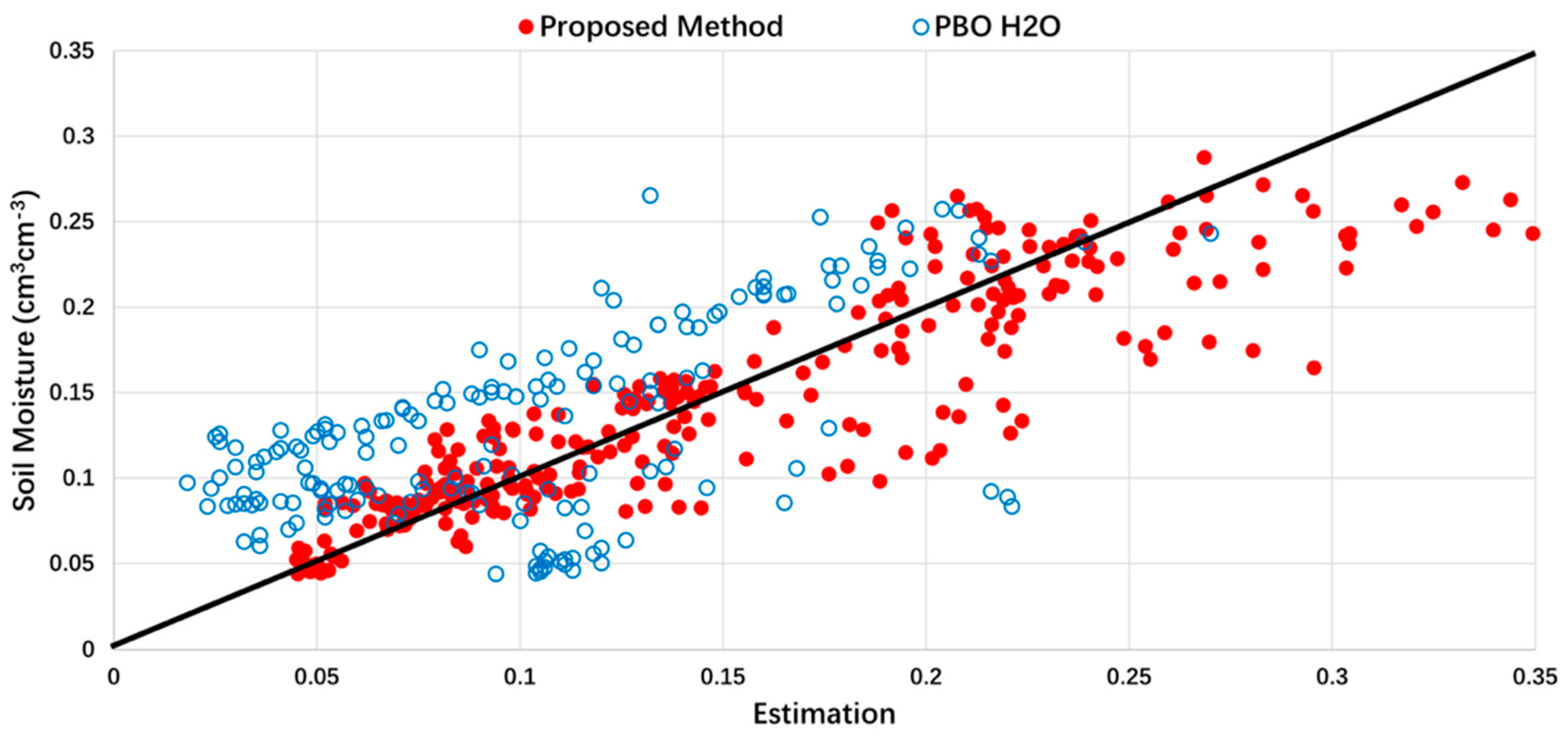
| Correlation Coefficient | Mean Error (cm3cm−3) | Root-Mean-Square Error (cm3cm−3) | |
|---|---|---|---|
| Proposed method | 0.899 | −0.007 | 0.0345 |
| PBO H2O | 0.609 | −0.0275 | 0.0558 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, X.; Jin, T.; Yu, K.; Li, Y.; Li, J.; Zhang, Q. Soil Moisture Estimation by GNSS Multipath Signal. Remote Sens. 2019, 11, 2559. https://doi.org/10.3390/rs11212559
Chang X, Jin T, Yu K, Li Y, Li J, Zhang Q. Soil Moisture Estimation by GNSS Multipath Signal. Remote Sensing. 2019; 11(21):2559. https://doi.org/10.3390/rs11212559
Chicago/Turabian StyleChang, Xin, Taoyong Jin, Kegen Yu, Yunwei Li, Jiancheng Li, and Qiang Zhang. 2019. "Soil Moisture Estimation by GNSS Multipath Signal" Remote Sensing 11, no. 21: 2559. https://doi.org/10.3390/rs11212559
APA StyleChang, X., Jin, T., Yu, K., Li, Y., Li, J., & Zhang, Q. (2019). Soil Moisture Estimation by GNSS Multipath Signal. Remote Sensing, 11(21), 2559. https://doi.org/10.3390/rs11212559