Mapping of River Terraces with Low-Cost UAS Based Structure-from-Motion Photogrammetry in a Complex Terrain Setting



Abstract
:
1. Introduction
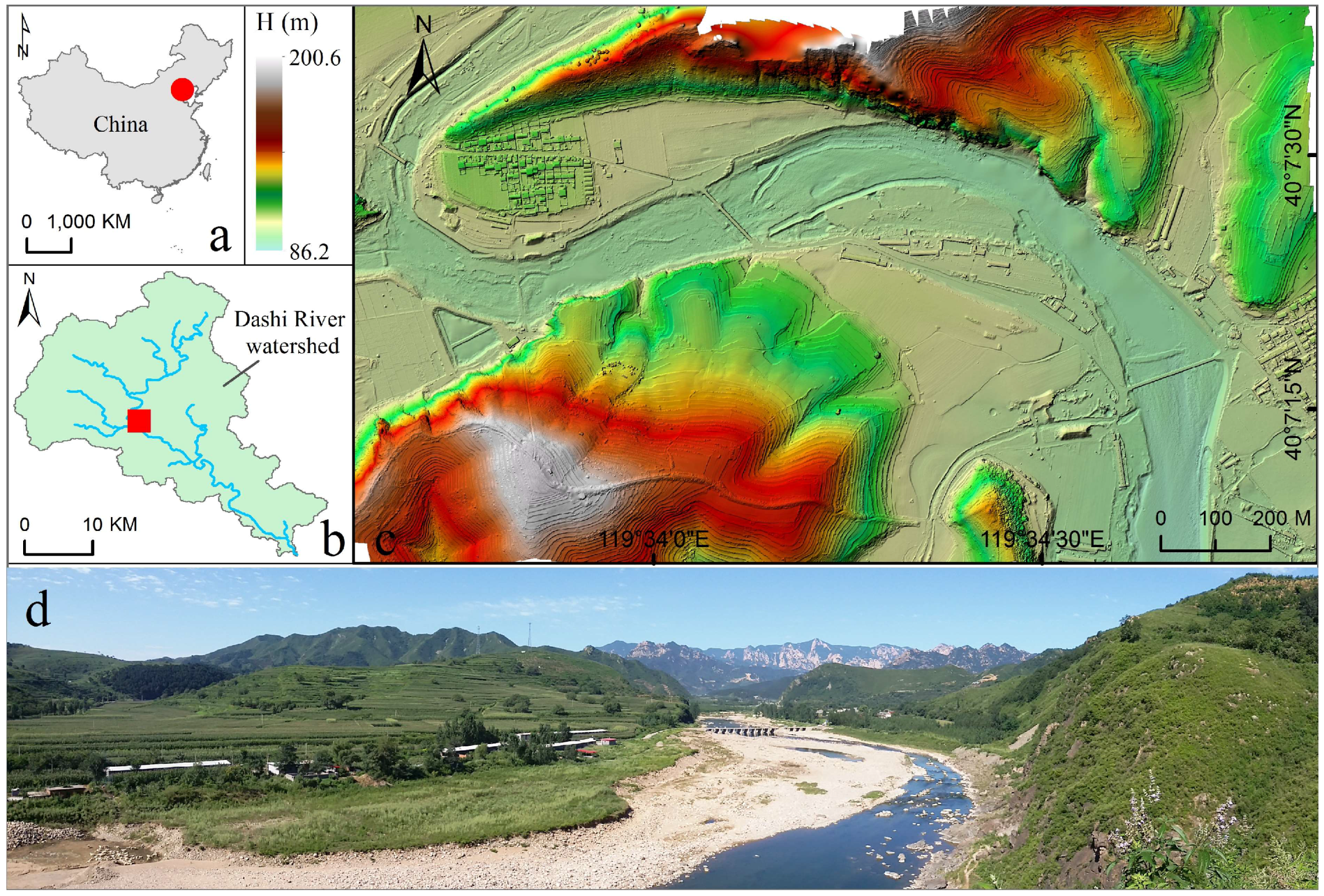
2. Study Area
3. Materials and Methods
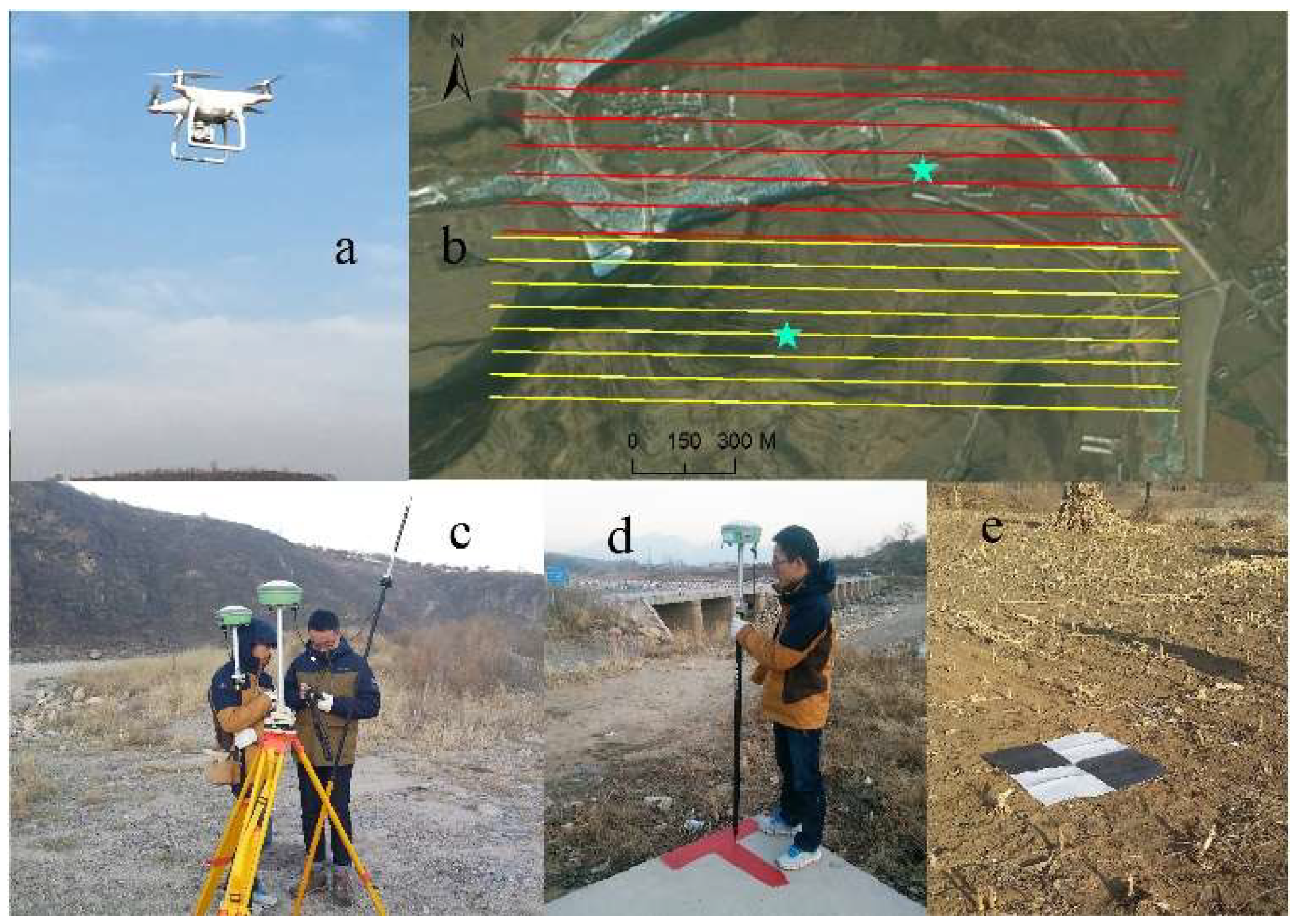
3.1. UAS Image Acquisition Over Complex Terrains and Ground Data Collection
3.2. SfM Photogrammetry Workflow
3.3. Accuracy Assessment
3.4. River Terrace Mapping and Analysis
4. Results
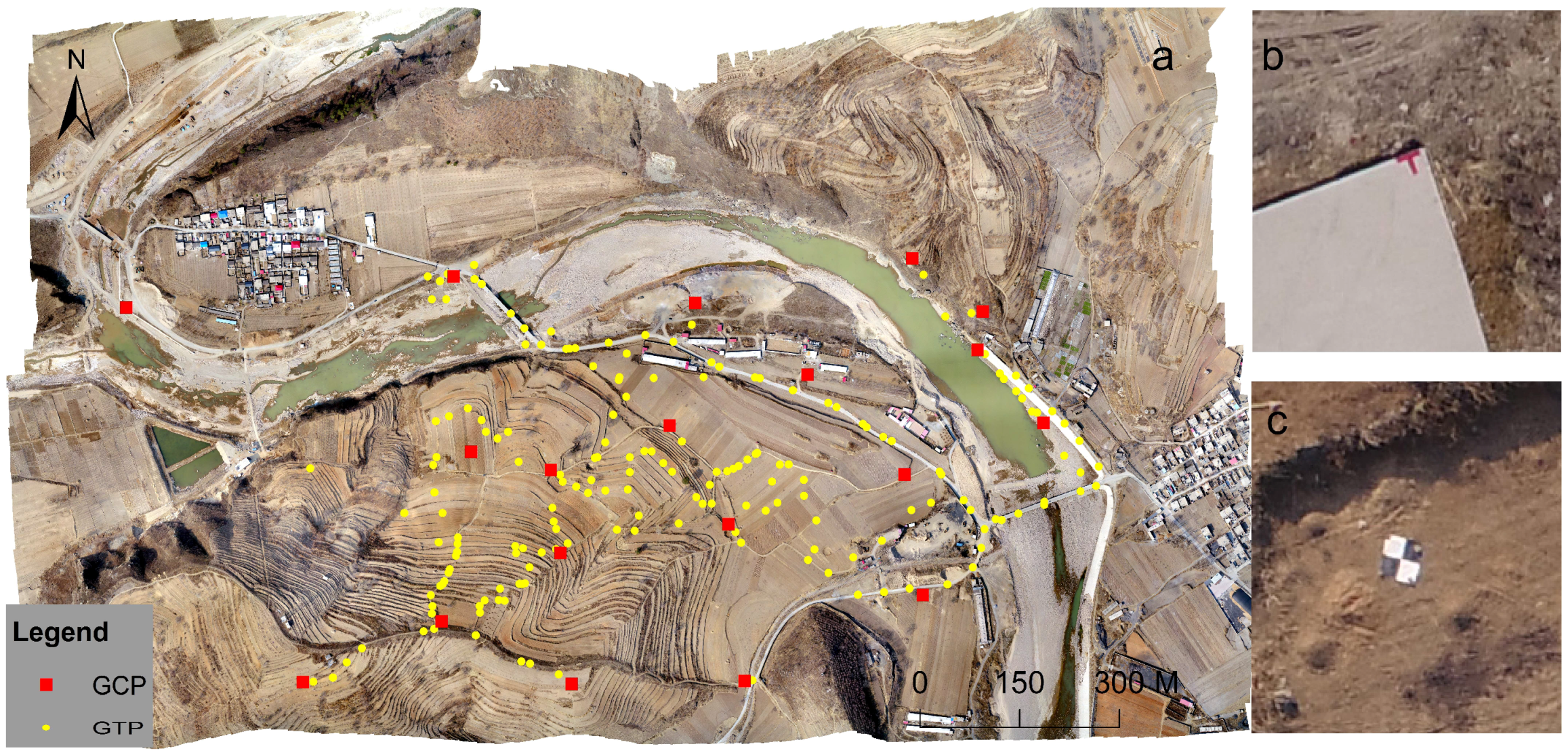
4.1. DSM and Orthomosaic
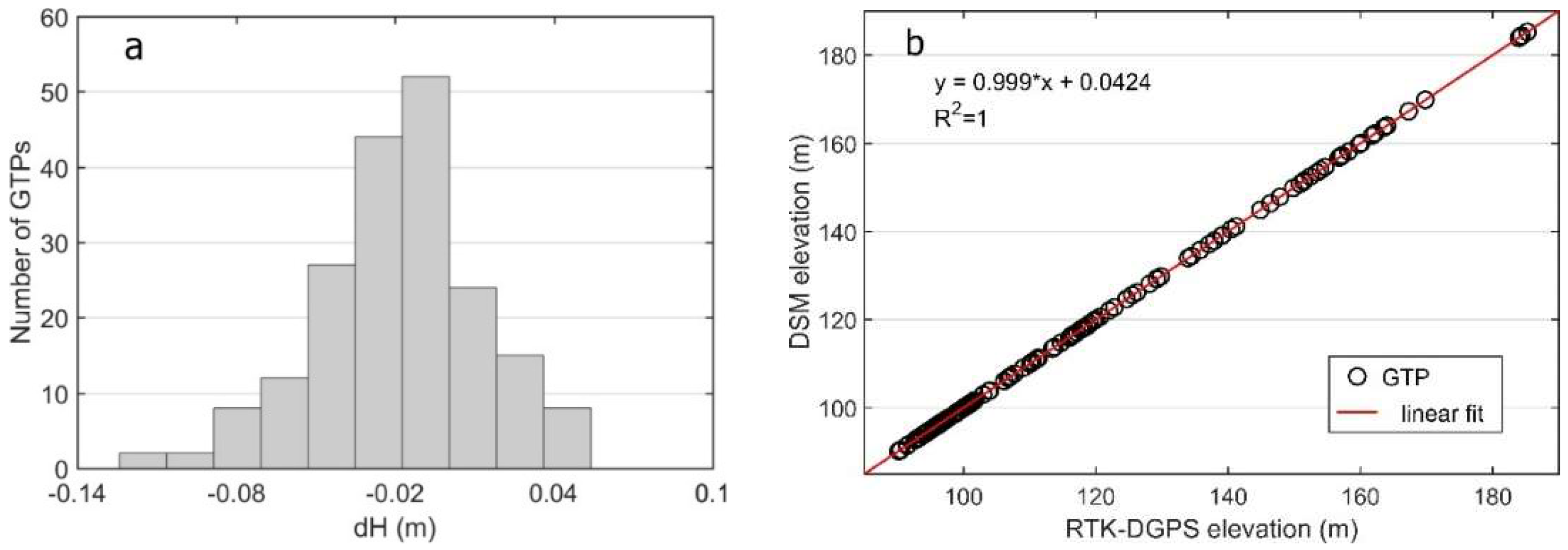
4.2. DSM Accuracy
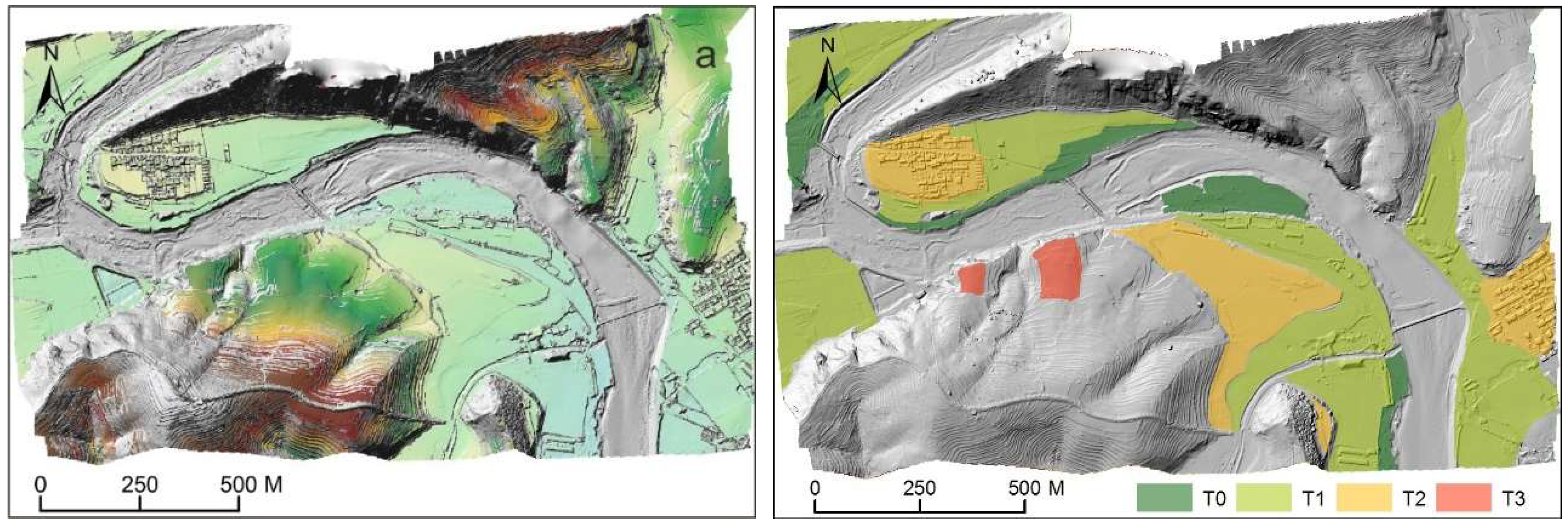
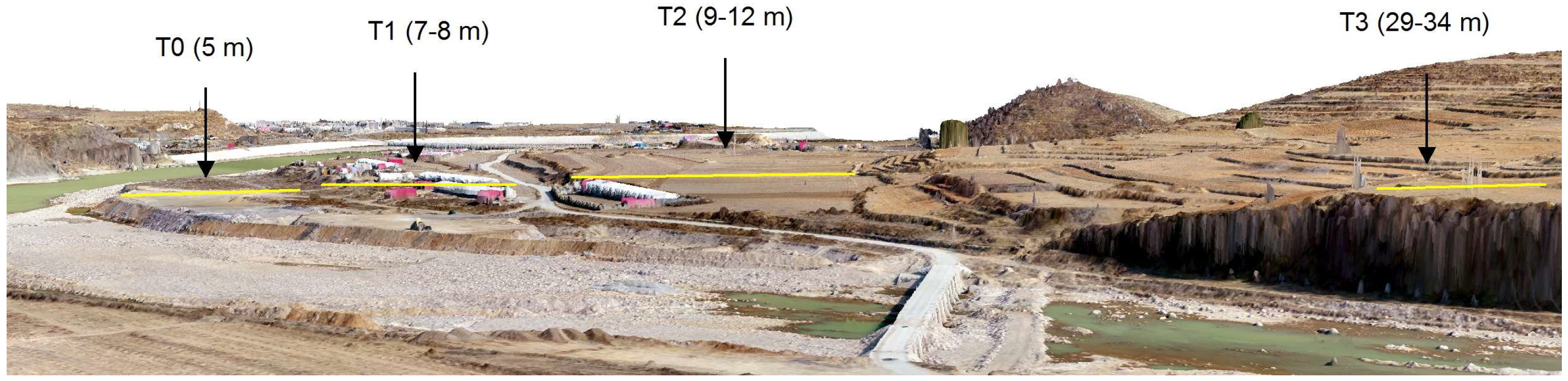
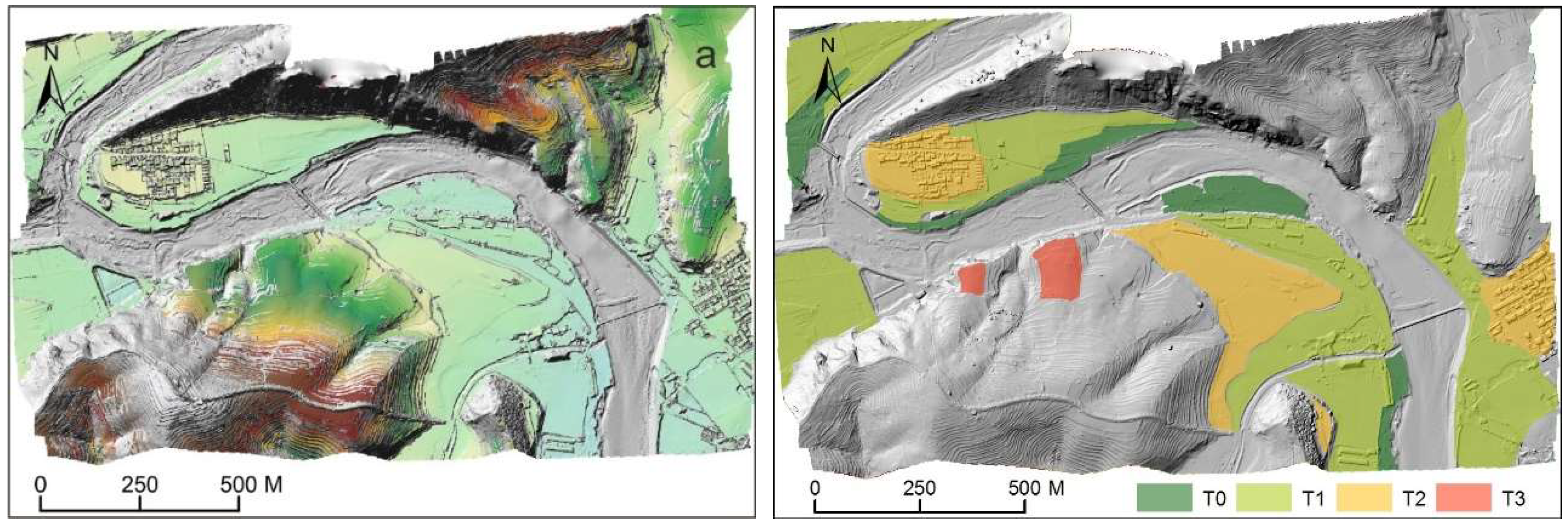
4.3. River Terraces
5. Discussion
5.1. Mapping of Complex Terrains Over Relatively Large Spatial Extents
5.2. Spatial Resolution and Vertical Accuracy
5.3. Terrace Extraction
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Pazzaglia, F.J.; Gardner, T.W. Fluvial terraces of the lower Susquehanna River. Geomorphology 1993, 8, 83–113. [Google Scholar] [CrossRef]
- Limaye, A.B.; Lamb, M.P. Numerical model predictions of autogenic fluvial terraces and comparison to climate change expectations. J. Geophys. Res. Earth 2016, 121, 512–544. [Google Scholar] [CrossRef] [Green Version]
- Pederson, J.L.; Anders, M.D.; Rittenhour, T.M.; Sharp, W.D.; Gosse, J.C.; Karlstrom, K.E. Using fill terraces to understand incision rates and evolution of the Colorado River in eastern Grand Canyon, Arizona. J. Geophys. Res. Earth 2006, 111, F02003. [Google Scholar] [CrossRef]
- Bridgland, D.; Westaway, R. Climatically controlled river terrace staircases: A worldwide Quaternary phenomenon. Geomorphology 2008, 98, 285–315. [Google Scholar] [CrossRef] [Green Version]
- Meikle, C.; Stokes, M.; Maddy, D. Field mapping and GIS visualisation of Quaternary river terrace landforms: An example from the Rio Almanzora, SE Spain. J. Maps 2010, 6, 531–542. [Google Scholar] [CrossRef]
- Demoulin, A.; Bovy, B.; Rixhon, G.; Cornet, Y. An automated method to extract fluvial terraces from digital elevation models: The Vesdre valley, a case study in eastern Belgium. Geomorphology 2007, 91, 51–64. [Google Scholar] [CrossRef]
- Passaro, S.; Ferranti, L.; de Alteriis, G. The use of high-resolution elevation histograms for mapping submerged terraces: Tests from the Eastern Tyrrhenian Sea and the Eastern Atlantic Ocean. Quatern. Int. 2011, 232, 238–249. [Google Scholar] [CrossRef]
- Stout, J.C.; Belmont, P. TerEx Toolbox for semi-automated selection of fluvial terrace and floodplain features from LiDAR. Earth Surf. Proc. Landf. 2014, 39, 569–580. [Google Scholar] [CrossRef]
- Clubb, F.J.; Mudd, S.M.; Milodowski, D.T.; Valters, D.A.; Slater, L.J.; Hurst, M.D.; Limaye, A.B. Geomorphometric delineation of floodplains and terraces from objectively defined topographic thresholds. Earth Surf. Dyn. Discuss. 2017, 5, 369–385. [Google Scholar] [CrossRef]
- Li, H.; Zhao, J.Y. Evaluation of the Newly Released Worldwide AW3D30 DEM Over Typical Landforms of China Using Two Global DEMs and ICESat/GLAS Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 4430–4440. [Google Scholar] [CrossRef]
- Wilson, J.P. Digital terrain modeling. Geomorphology 2012, 137, 107–121. [Google Scholar] [CrossRef]
- Ullman, S. The interpretation of structure from motion. Proc. R. Soc. B Biol. 1979, 203, 405–426. [Google Scholar] [CrossRef] [Green Version]
- Smith, M.; Carrivick, J.; Quincey, D. Structure from motion photogrammetry in physical geography. Prog. Phys. Geog. 2016, 40, 247–275. [Google Scholar] [CrossRef]
- Javernick, L.; Brasington, J.; Caruso, B. Modeling the topography of shallow braided rivers using Structure-from-Motion photogrammetry. Geomorphology 2014, 213, 166–182. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res. Earth 2012, 117, F03017. [Google Scholar] [CrossRef]
- Nebiker, S.; Annen, A.; Scherrer, M.; Oesch, D. A light-weight multispectral sensor for micro UAV–Opportunities for very high resolution airborne remote sensing. ISPRS Arch. 2008, 37, 1193–1199. [Google Scholar]
- Turner, D.; Lucieer, A.; Watson, C. An automated technique for generating georectified mosaics from ultra-high resolution unmanned aerial vehicle (UAV) imagery, based on structure from motion (SfM) point clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef]
- Tonkin, T.N.; Midgley, N.G.; Graham, D.J.; Labadz, J.C. The potential of small unmanned aircraft systems and structure-from-motion for topographic surveys: A test of emerging integrated approaches at Cwm Idwal, North Wales. Geomorphology 2014, 226, 35–43. [Google Scholar] [CrossRef] [Green Version]
- Immerzeel, W.W.; Kraaijenbrink, P.D.A.; Shea, J.M.; Shrestha, A.B.; Pellicciotti, F.; Bierkens, M.F.P.; De Jong, S.M. High-resolution monitoring of Himalayan glacier dynamics using unmanned aerial vehicles. Remote Sens. Environ. 2014, 150, 93–103. [Google Scholar] [CrossRef]
- Gonçalves, J.A.; Henriques, R. UAV photogrammetry for topographic monitoring of coastal areas. ISPRS J. Photogramm. Remote Sens. 2015, 104, 101–111. [Google Scholar] [CrossRef]
- Cook, K.L. An evaluation of the effectiveness of low-cost UAVs and structure from motion for geomorphic change detection. Geomorphology 2017, 278, 195–208. [Google Scholar] [CrossRef]
- Long, N.; Millescamps, B.; Guillot, B.; Pouget, F.; Bertin, X. Monitoring the Topography of a Dynamic Tidal Inlet Using UAV Imagery. Remote Sens. 2016, 8, 387. [Google Scholar] [CrossRef]
- Gindraux, S.; Boesch, R.; Farinotti, D. Accuracy assessment of digital surface models from unmanned aerial vehicles’ imagery on glaciers. Remote Sens. 2017, 9, 186. [Google Scholar] [CrossRef]
- Gonçalves, G.R.; Pérez, J.A.; Duarte, J. Accuracy and effectiveness of low cost UASs and open source photogrammetric software for foredunes mapping. Int. J. Remote Sens. 2018, 39, 5059–5077. [Google Scholar] [CrossRef]
- Gómez-Gutiérrez, Á.; Schnabel, S.; Berenguer-Sempere, F.; Lavado-Contador, F.; Rubio-Delgado, J. Using 3D photo-reconstruction methods to estimate gully headcut erosion. Catena 2014, 120, 91–101. [Google Scholar] [CrossRef]
- Hemmelder, S.; Marra, W.; Markies, H.; De Jong, S.M. Monitoring river morphology & bank erosion using UAV imagery—A case study of the river Buëch, Hautes-Alpes, France. Int. J. Appl. Earth Obs. 2018, 73, 428–437. [Google Scholar] [CrossRef]
- Liu, Y.; Kuang, H.; Peng, N.; Xu, H.; Zhang, P.; Wang, N.; An, W. Mesozoic basins and associated palaeogeographic evolution in North China. J. Palaeogeogr. 2015, 4, 189–202. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Zhou, J.; Yang, X.; Chen, Z. Sedimentary characteristics and geneses of pebbly meandering river: A case from Dashihe River in Qinghuangdao Area. Earth Sci. 2018, 43, 277–286, (In Chinese with English abstract). [Google Scholar]
- Wang, J.S. Routes of geology cognition practice. In Teaching Guidebook of Beidaihe Geology Cognition Practice; Wang, J., Ed.; China University of Geosciences Press: Beijing, China, 2011; pp. 73–78. (In Chinese) [Google Scholar]
- Flying Multi-battery Missions. Drones Made Easy. Available online: https://support.dronesmadeeasy.com/hc/en-us/articles/206104736-Flying-Multi-Battery-Missions (accessed on 13 November 2018).
- Agisoft PhotoScan User Manual—Professional Edition, Version 1.4. Available online: http://www.agisoft.com/pdf/photoscan-pro_1_4_en.pdf (accessed on 5 December 2018).
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; pp. 1150–1157. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Dietrich, J.T. Cost-effective non-metric photogrammetry from consumer-grade sUAS: Implications for direct georeferencing of structure from motion photogrammetry. Earth Surf. Proc. Landf. 2017, 486, 473–486. [Google Scholar] [CrossRef]
- Verhoeven, G. Taking computer vision aloft—Archaeological three-dimensional reconstructions from aerial photographs with Photoscan. Archaeol. Prospect. 2011, 18, 67–73. [Google Scholar] [CrossRef]
- Rosnell, T.; Honkavaara, E. Point Cloud Generation from Aerial Image Data Acquired by a Quadrocopter Type Micro Unmanned Aerial Vehicle and a Digital Still Camera. Sensors 2012, 12, 453–480. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Turner, D.; Lucieer, A.; Wallace, L. Direct Georeferencing of Ultrahigh-Resolution UAV Imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2738–2745. [Google Scholar] [CrossRef]
- Yang, H.; Chen, W.; Qian, T.; Shen, D.; Wang, J. The Extraction of Vegetation Points from LiDAR Using 3D Fractal Dimension Analyses. Remote Sens. 2015, 7, 10815–10831. [Google Scholar] [CrossRef] [Green Version]
- Xhardé, R.; Long, B.F.; Forbes, D.L. Accuracy and limitations of airborne LiDAR surveys in coastal environments. In Proceedings of the Geoscience and Remote Sensing Symposium, Denver, CO, USA, 31 July–4 August 2006; pp. 2412–2415. [Google Scholar] [CrossRef]
- Hollenbeck, J.; Olsen, M.; Haig, S. Terrestrial laser scanning to support ecological research in the rocky intertidal zone. J. Coast. Conserv. 2014, 18, 701–714. [Google Scholar] [CrossRef]
- Tahar, K.N. An evaluation on different number of ground control points in unmanned aerial vehicle photogrammetric block. In Proceedings of the ISPRS 8th 3D GeoInfo Conference & WG II/2 Workshop, Istanbul, Turkey, 27–29 November 2013; pp. 93–98. [Google Scholar]
- Tonkin, T.N.; Midgley, G.N. Ground-control networks for image based surface reconstruction: An investigation of optimum survey designs using UAV derived imagery and structure-from-motion photogrammetry. Remote Sens. 2016, 8, 786. [Google Scholar] [CrossRef]
- Martínez-Carricondo, P.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Mesas-Carrascosa, F.J.; García-Ferrer, A.; Pérez-Porras, F.J. Assessment of UAV-photogrammetric mapping accuracy based on variation of ground control points. Int. J. Appl. Earth Obs. 2018, 72, 1–10. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]
- Wang, Z.; Li, H.; Cai, X. Remotely Sensed Analysis of Channel Bar Morphodynamics in the Middle Yangtze River in Response to a Major Monsoon Flood in 2002. Remote Sens. 2018, 10, 1165. [Google Scholar] [CrossRef]
- Drăguţ, L.; Eisank, C. Object representations at multiple scales from digital elevation models. Geomorphology 2011, 129, 183–189. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pedersen, G.B.M. Semi-automatic classification of glaciovolcanic landforms: An object-based mapping approach based on geomorphometry. J. Volcanol. Geotherm. Res. 2016, 311, 29–40. [Google Scholar] [CrossRef] [Green Version]
- Eisank, C.; Smith, M.; Hillier, J. Assessment of multiresolution segmentation for delimiting drumlins in digital elevation models. Geomorphology 2014, 214, 452–464. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Tiede, D.; Blaschke, T. Detection of gully-affected areas by applying object-based image analysis (OBIA) in the region of Taroudannt, Morocco. Remote Sens. 2014, 6, 8287–8309. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node | CPU | RAM | GPU |
|---|---|---|---|
| Host1 | Intel i7 6900K | 32 GB DDR4 | 2×NVIDIA GeForce GTX1080 |
| 3.2 GHz, 8 cores | 2560 CUDA cores and 8 GB RAM | ||
| Host2 | AMD Ryzen 7 1800X | 16 GB DDR4 | NVIDIA GeForce GTX1080 |
| 3.6 GHz, 8 cores | 2560 CUDA cores and 8 GB RAM | ||
| Host3 | Intel i7 6700K | 16 GB DDR4 | NVIDIA GeForce GTX1060 |
| 4.0 GHz, 4 cores | 1280 CUDA cores and 6 GB RAM | ||
| Server | Intel i7 4790 | 16 GB DDR3 | NVIDIA Quadro 2000 |
| 3.6 GHz, 4 cores | 192 CUDA cores and 1 GB RAM |
| 1. Photoalignment parameters | ||||
| Accuracy | Pair preselection | Point limit | ||
| High | Reference | 80,000 | ||
| 2. Optimization | ||||
| Camera accuracy | Marker accuracy | Projection accuracy | Tie point accuracy | |
| 5 m | 0.005 m | 0.1 pix | 4 pix | |
| 3. Building dense point cloud | ||||
| Quality | Depth filtering | |||
| Ultra-high | Moderate | |||
| 4. Building mesh | ||||
| Point classes | Surface type | Source data | Polygon count | Interpolation |
| All | Height field | Dense cloud | 50,000,000 | Enabled |
| (a) GCP error | RMSE X (cm) | RMSE Y (cm) | RMSE Z (cm) | Total RMSE (cm) | MRE (pix) |
| 2.02 | 2.24 | 1.44 | 3.34 | 0.34 | |
| (b) GTP Z error | Mean (cm) | Median (cm) | Stdev (cm) | RMSE (cm) | MAD (cm) |
| −1.80 | −1.70 | 3.30 | 3.10 | 2.90 |
| Study | Geomorphologic Setting | Area (km2) | Camera | Platform | Altitude (m, AGL) | Vertical RMSE (cm) |
|---|---|---|---|---|---|---|
| Tonkin et al., 2014 [18] | Glacial (vegetated) | 0.16 | Canon EOS-M (18 MP) | Hexacopter | 117 | 51.7 |
| Gonçalves et al., 2015 [24] | Coastal | 1.3 | Canon Ixus 220 HS (12 MP) | Fixed-wing | 131 | 2.7–4.6 |
| Long et al., 2016 [22] | Tidal inlet | 3 | Canon (16 MP) | Fixed-wing | 149 | 17 |
| Gonçalves et al., 2018 [20] | Sandy beach | 0.07 | GoPro Hero4 Silver | Quadcopter | 100/80 | 12 |
| This work | River valley | 1.9 | Integrated (20 MP) | Quadcopter | 150/120 | 3.1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Chen, L.; Wang, Z.; Yu, Z. Mapping of River Terraces with Low-Cost UAS Based Structure-from-Motion Photogrammetry in a Complex Terrain Setting. Remote Sens. 2019, 11, 464. https://doi.org/10.3390/rs11040464
Li H, Chen L, Wang Z, Yu Z. Mapping of River Terraces with Low-Cost UAS Based Structure-from-Motion Photogrammetry in a Complex Terrain Setting. Remote Sensing. 2019; 11(4):464. https://doi.org/10.3390/rs11040464
Chicago/Turabian StyleLi, Hui, Lin Chen, Zhaoyang Wang, and Zhongdi Yu. 2019. "Mapping of River Terraces with Low-Cost UAS Based Structure-from-Motion Photogrammetry in a Complex Terrain Setting" Remote Sensing 11, no. 4: 464. https://doi.org/10.3390/rs11040464
APA StyleLi, H., Chen, L., Wang, Z., & Yu, Z. (2019). Mapping of River Terraces with Low-Cost UAS Based Structure-from-Motion Photogrammetry in a Complex Terrain Setting. Remote Sensing, 11(4), 464. https://doi.org/10.3390/rs11040464