3D Forest Mapping Using A Low-Cost UAV Laser Scanning System: Investigation and Comparison




Abstract
:
1. Introduction
2. Study Area and Material
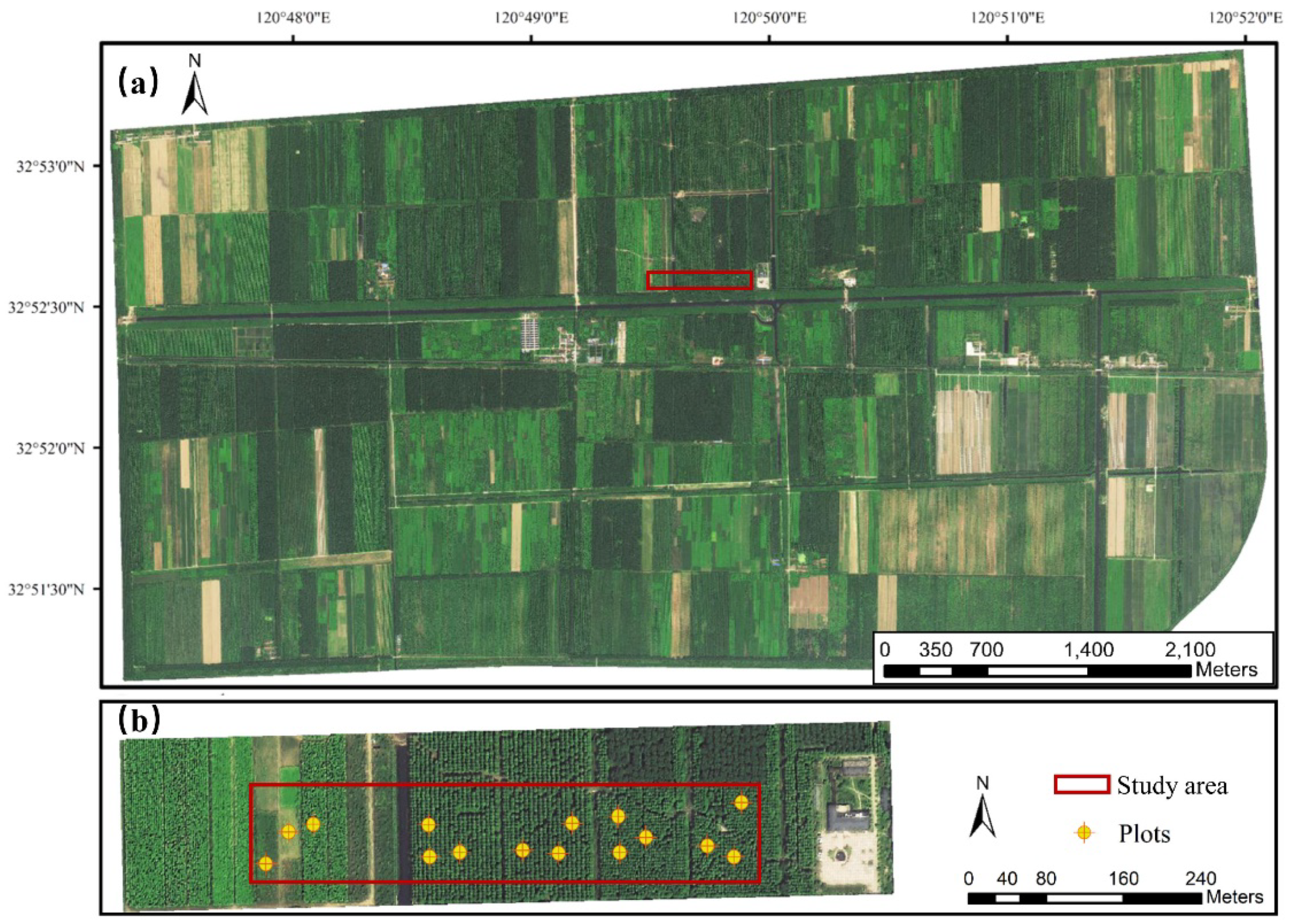
2.1. Study Area
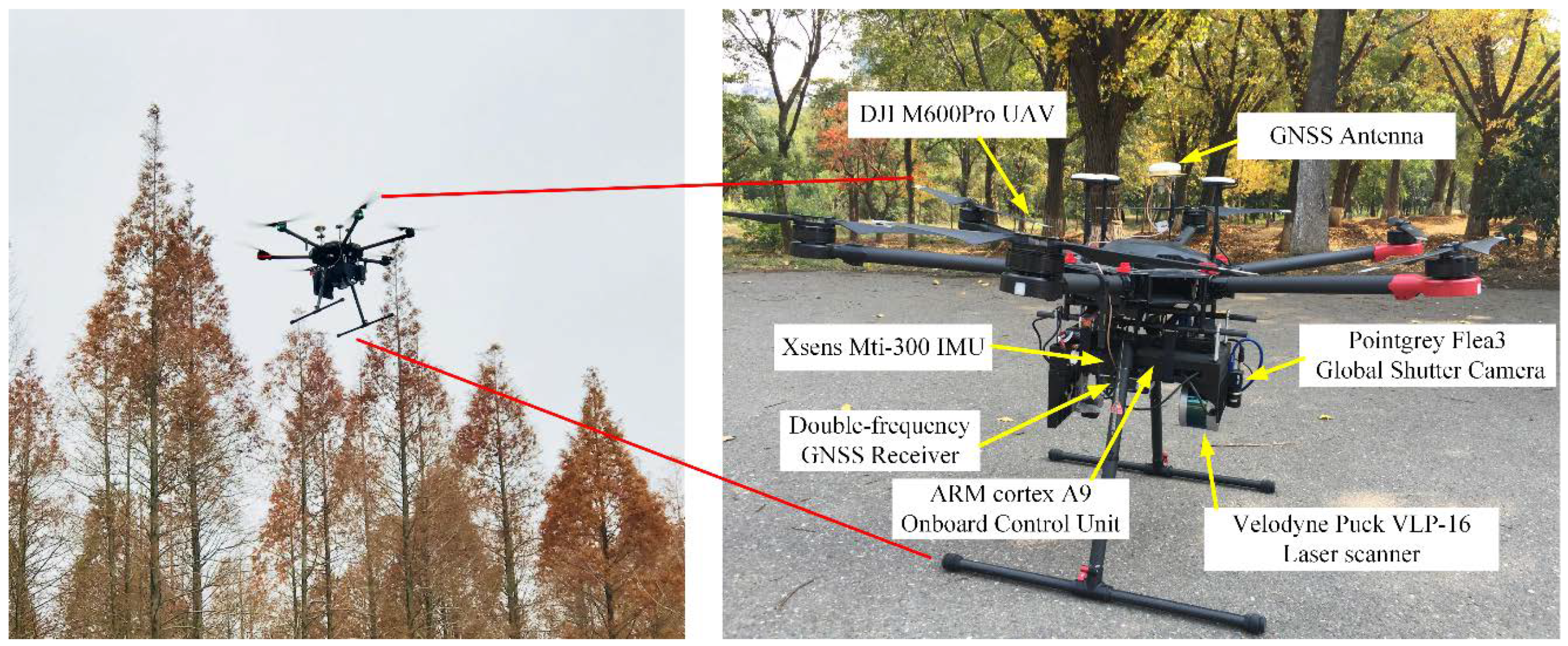
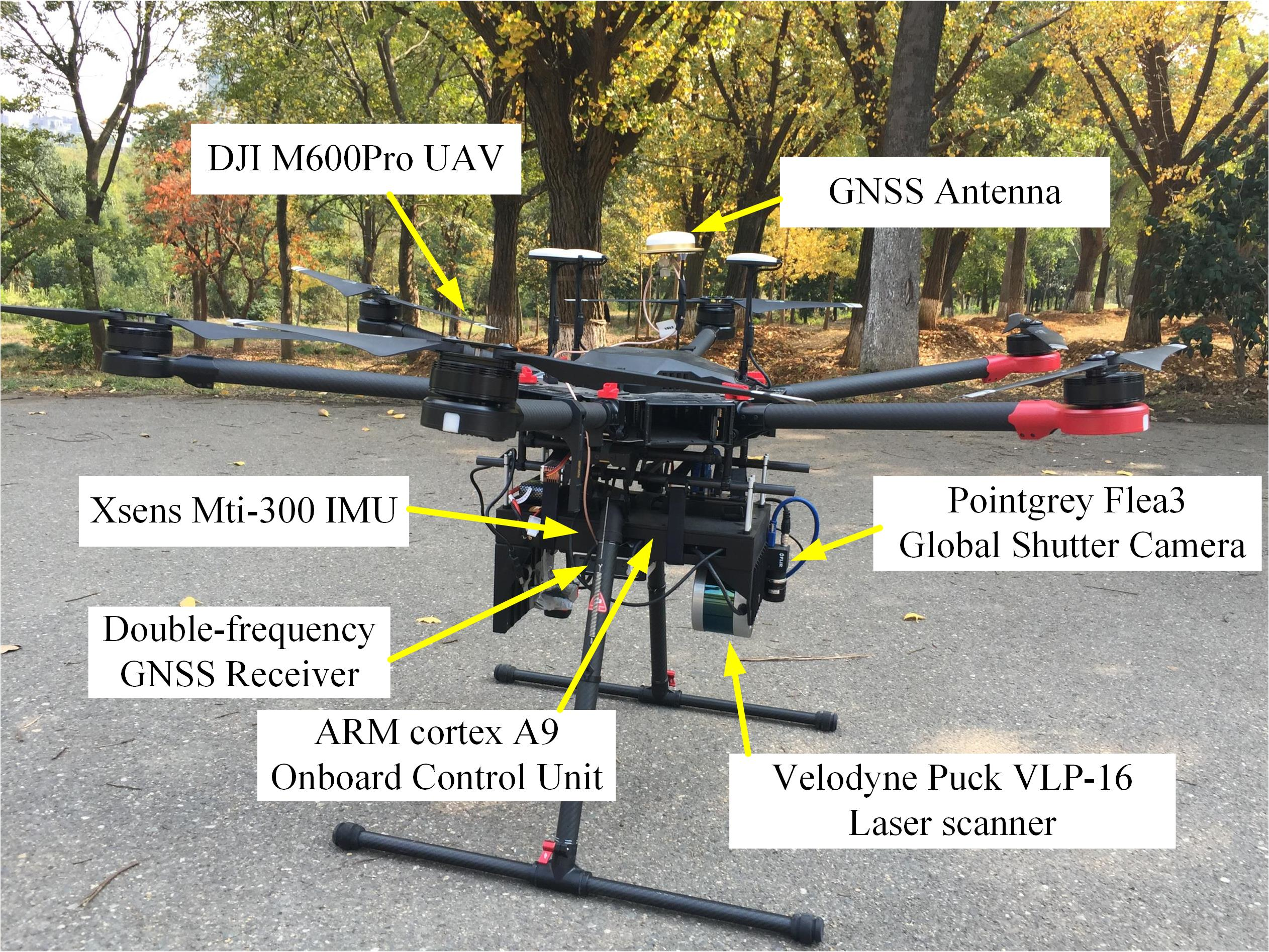
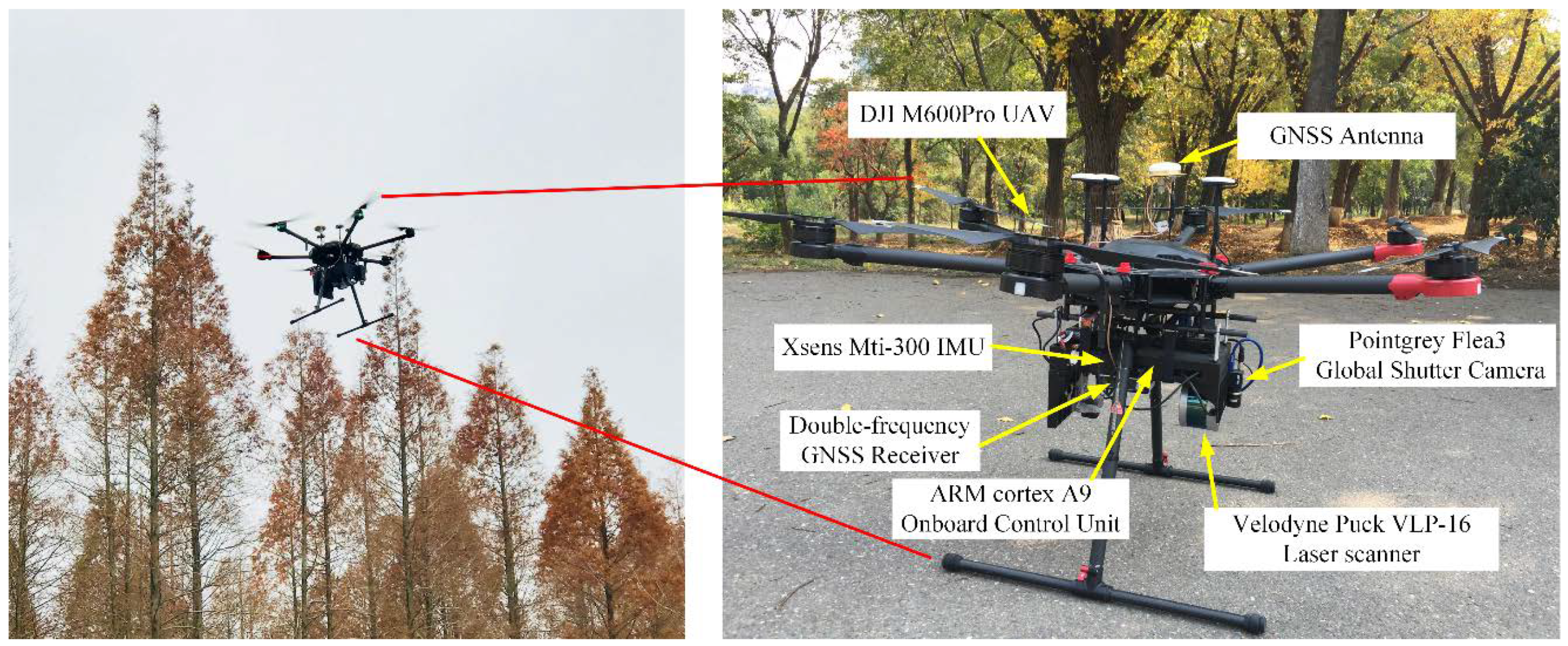
2.2. The Low-Cost ULS System and the Collected Data
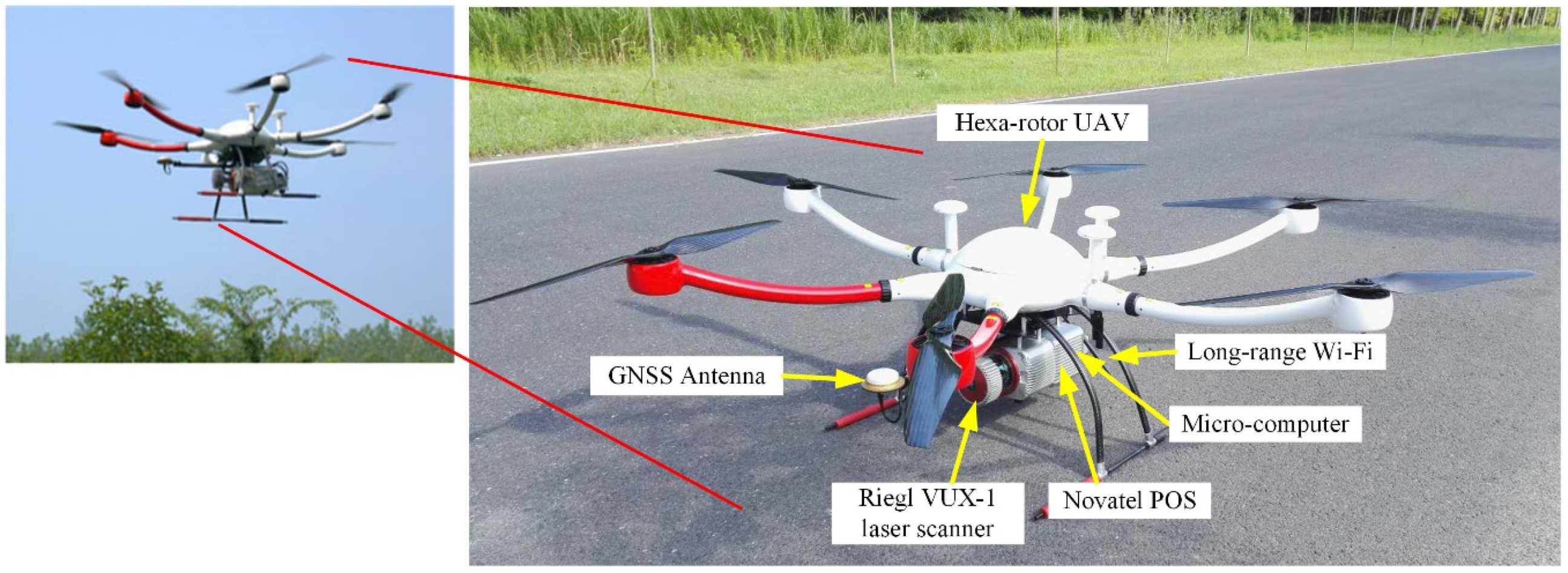
2.3. The High-End Commercial ULS System and the Collected Point Clouds
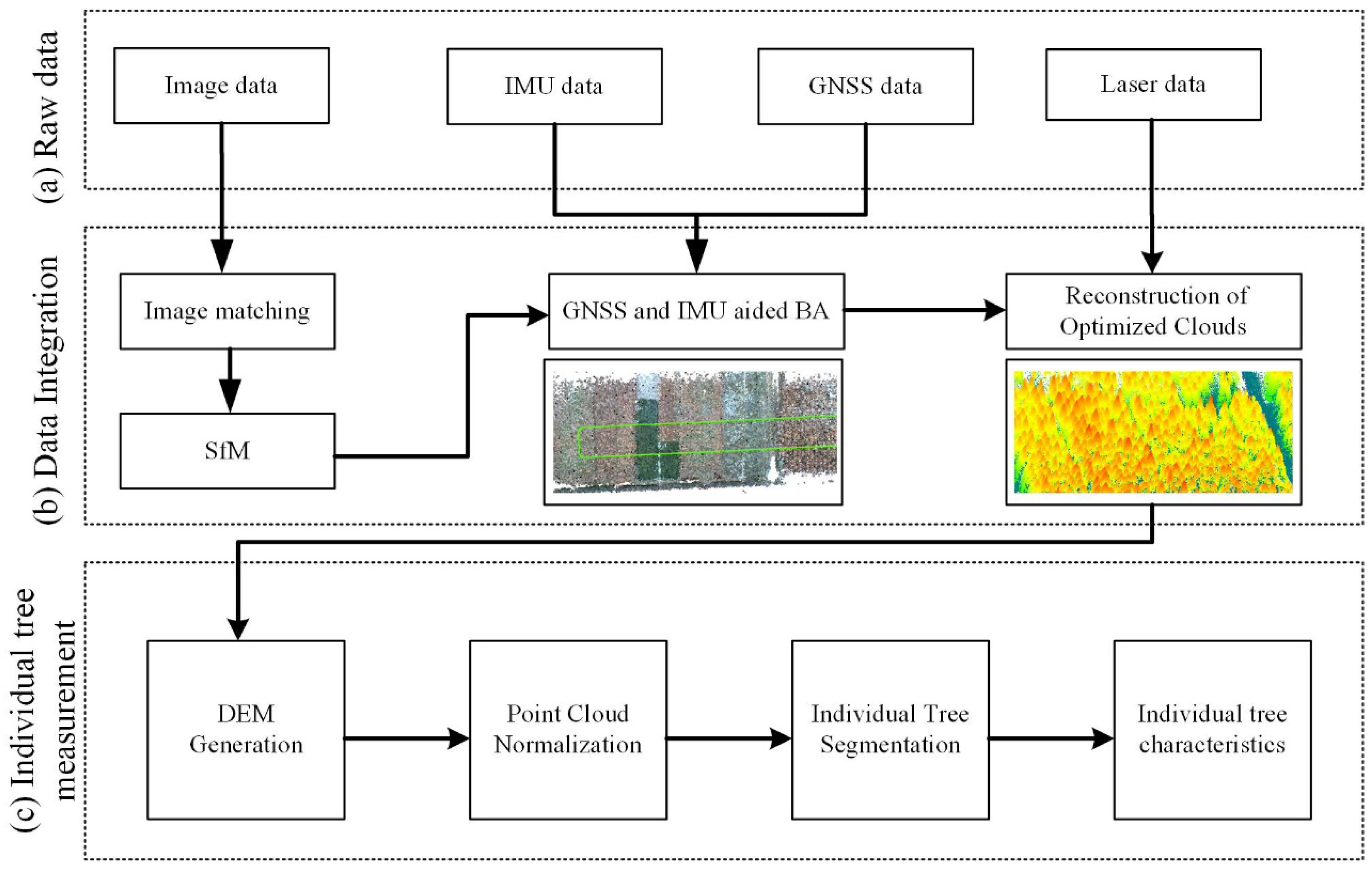
3. Methodology
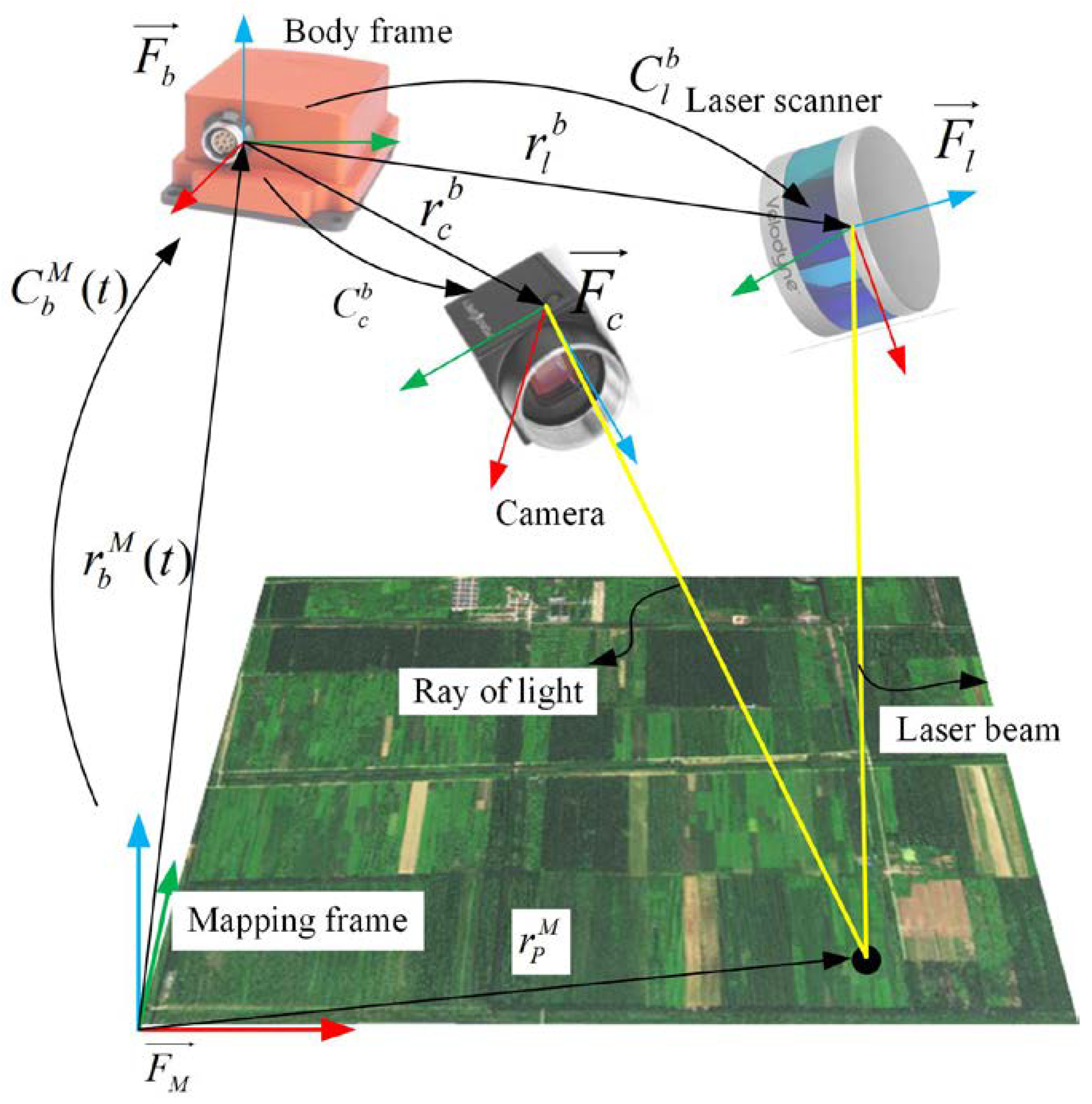
3.1. Coordinate Definitions
3.2. Data Integration
3.2.1. IMU Integration
3.2.2. Image Sequence Matching and SfM
3.2.3. GNSS and IMU Aided Bundle Adjustment
3.2.4. Reconstruction of the Point Clouds
3.3. Individual Tree Segmentation and Evaluation
3.3.1. Non-Ground Points Classification and Point Clouds Normalization
3.3.2. Hierarchical Segmentation of the Normalized Point Clouds
4. Results
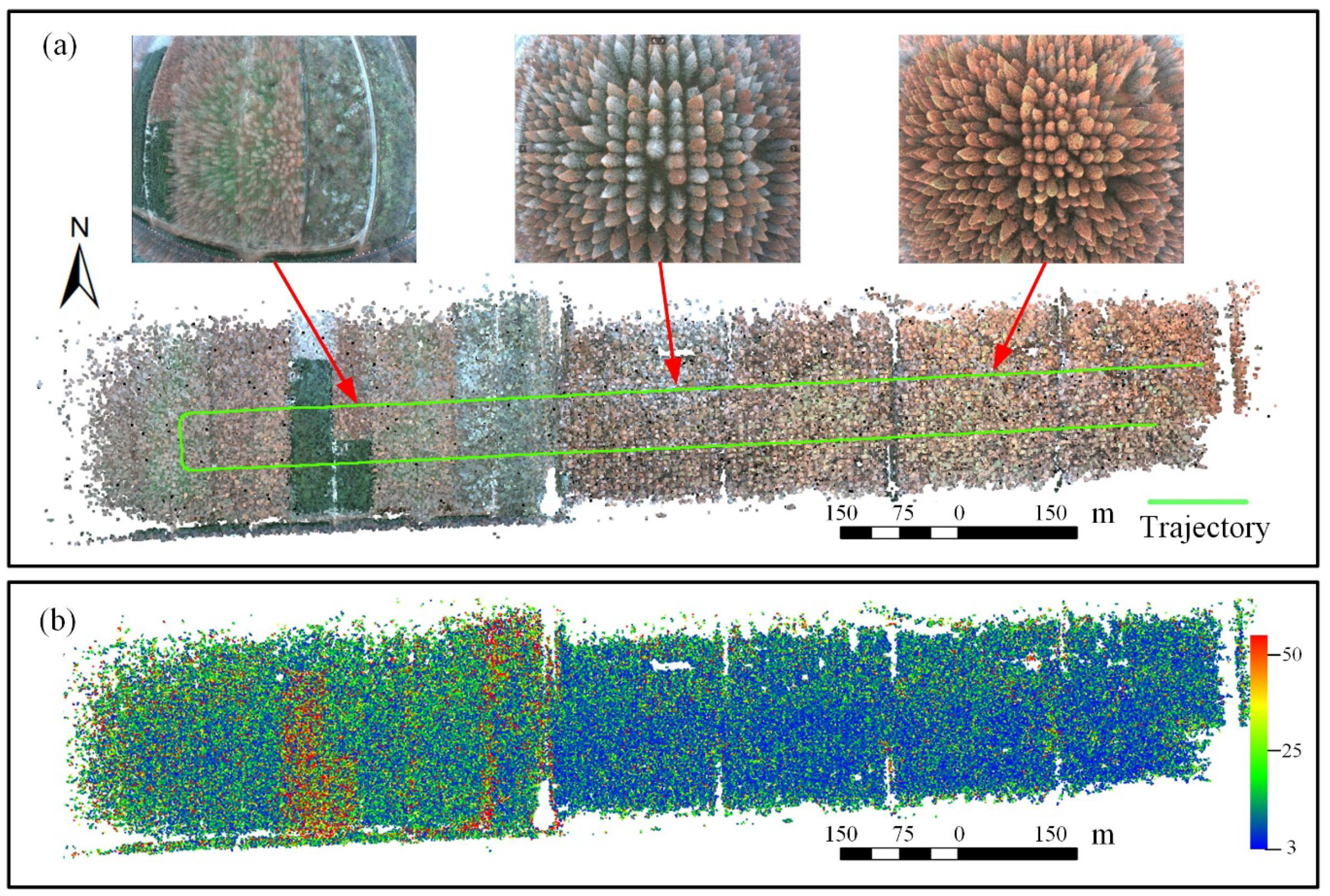
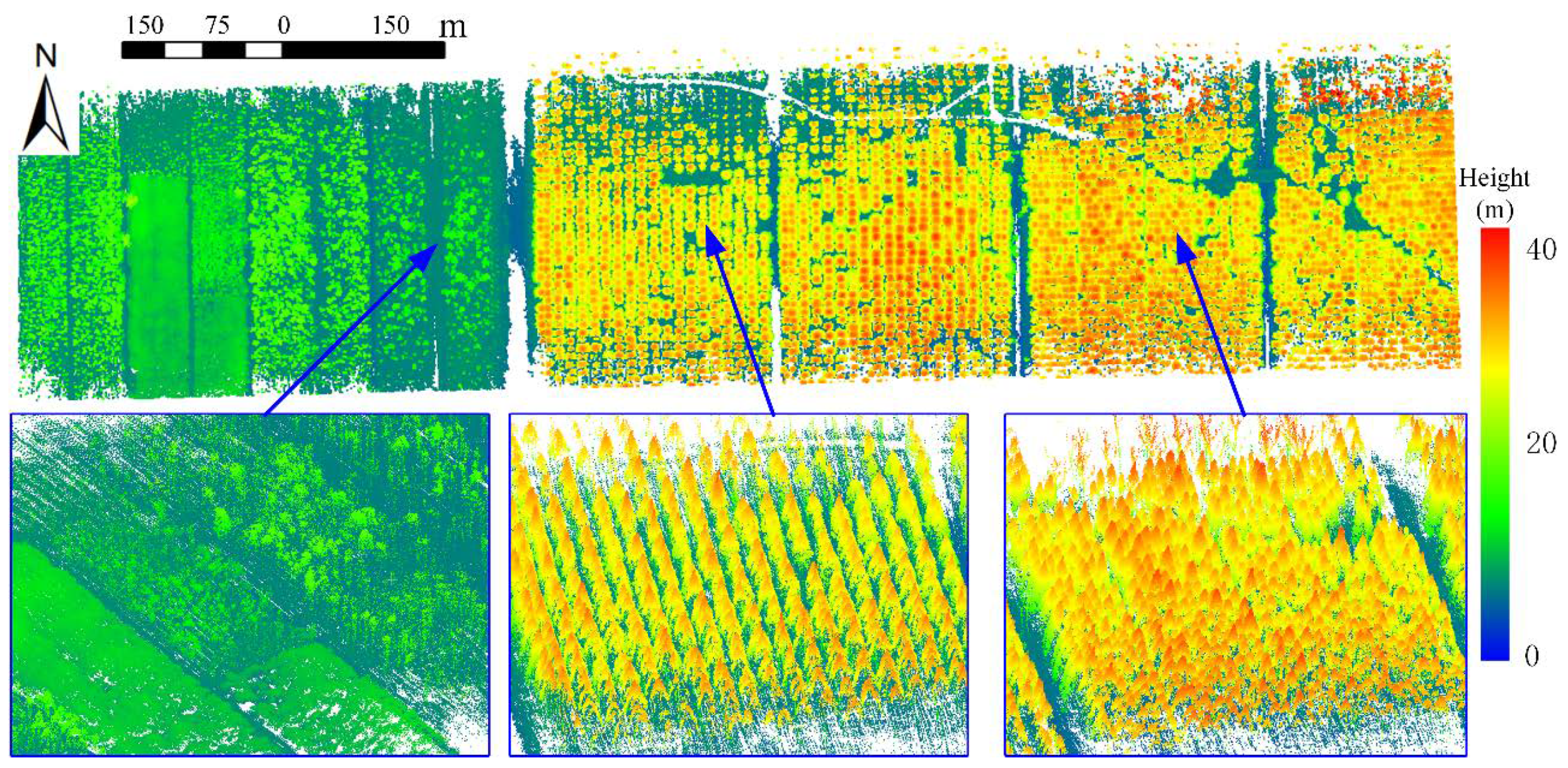
4.1. Reconstruction of the Point Clouds in Mapping Frame
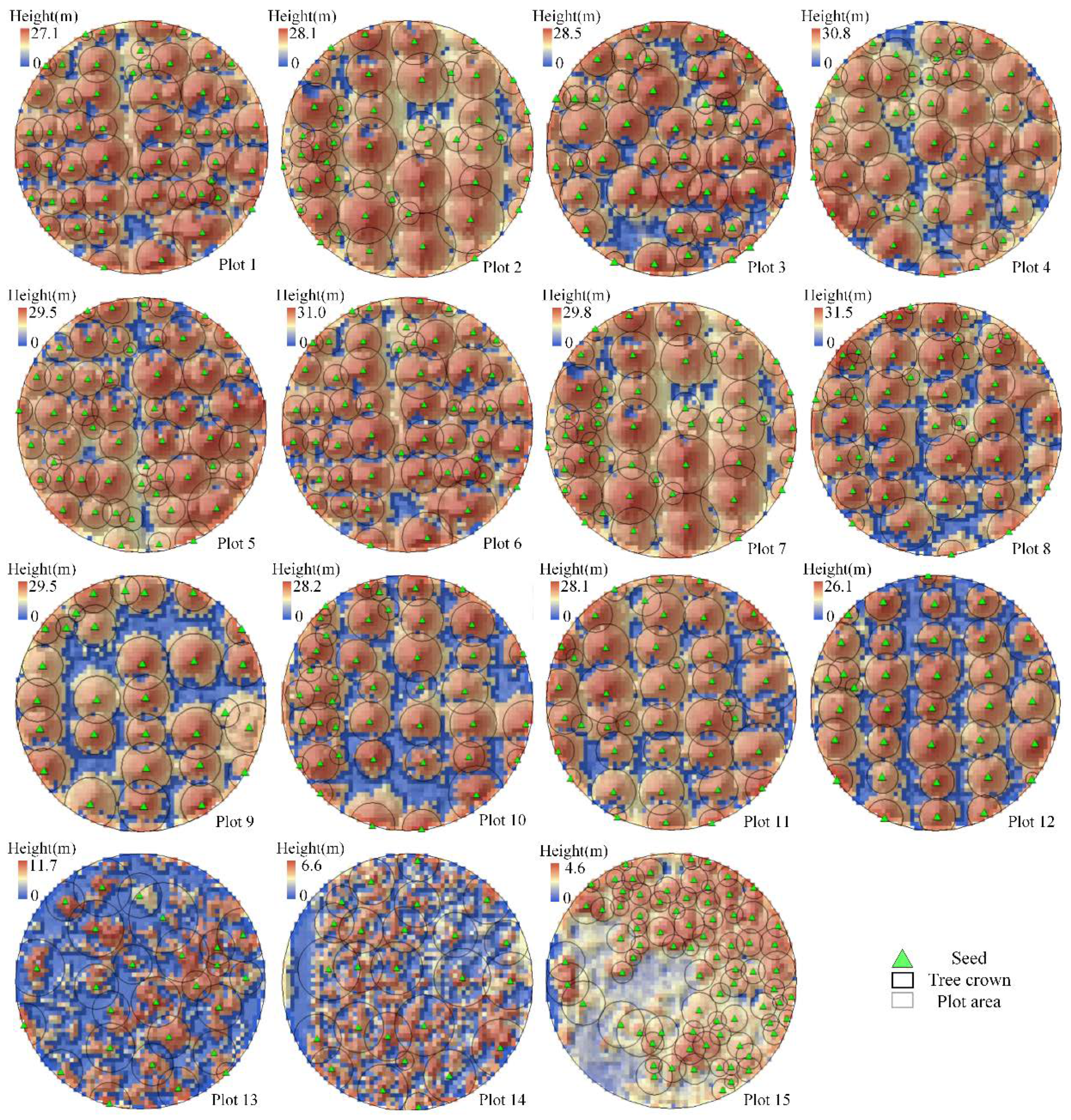
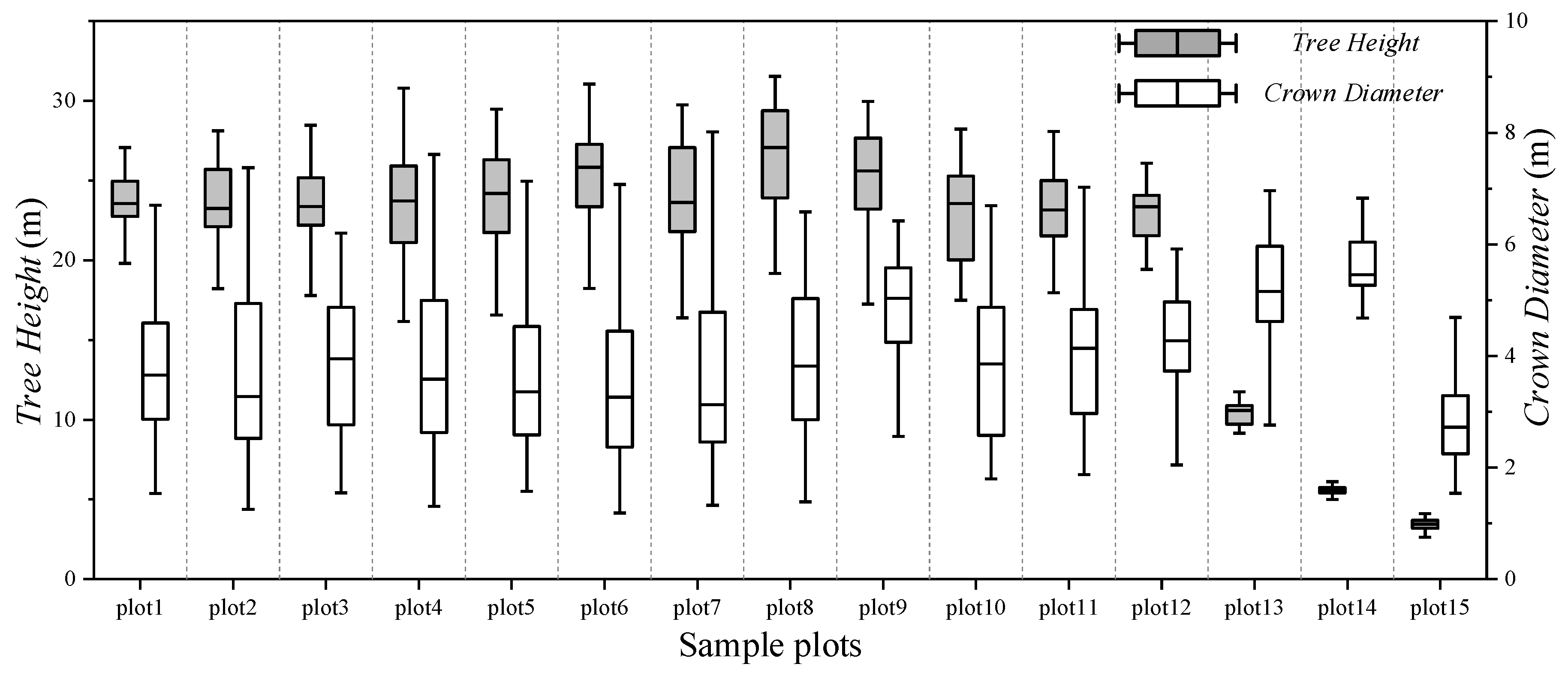
4.2. Individual Tree Measurement
5. Discussion
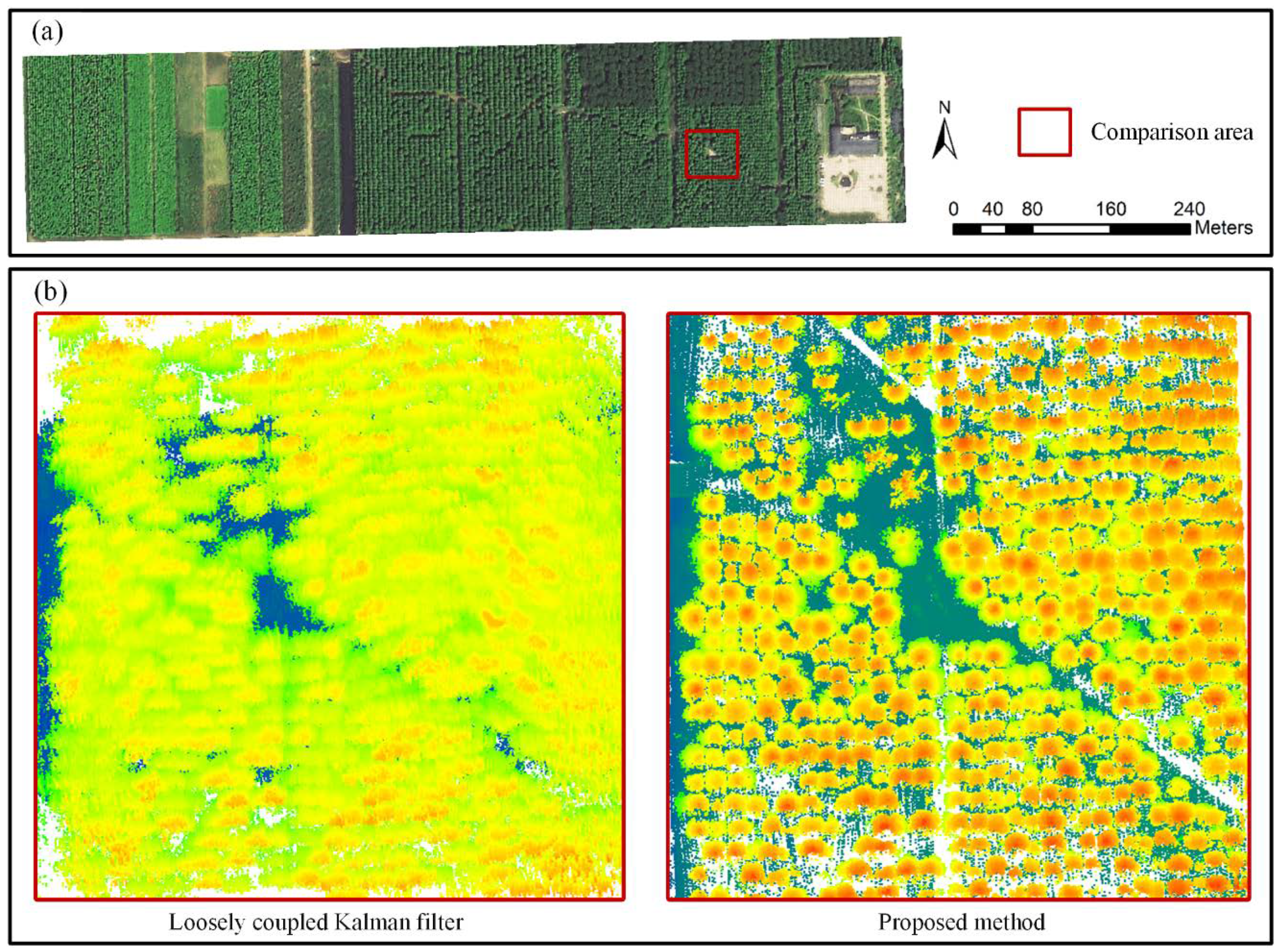
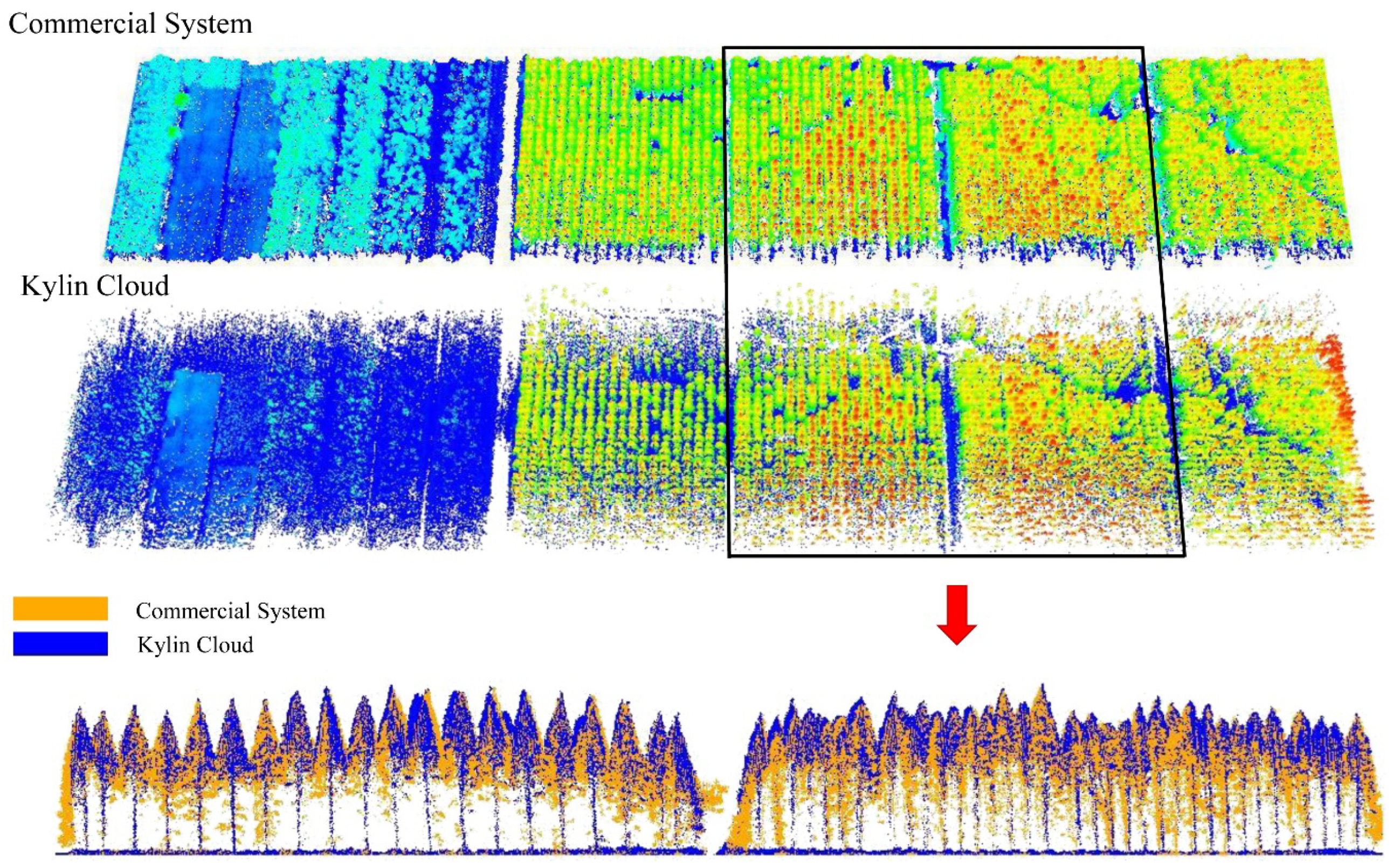
5.1. Comparison of the Point Clouds Quality from Different Platforms
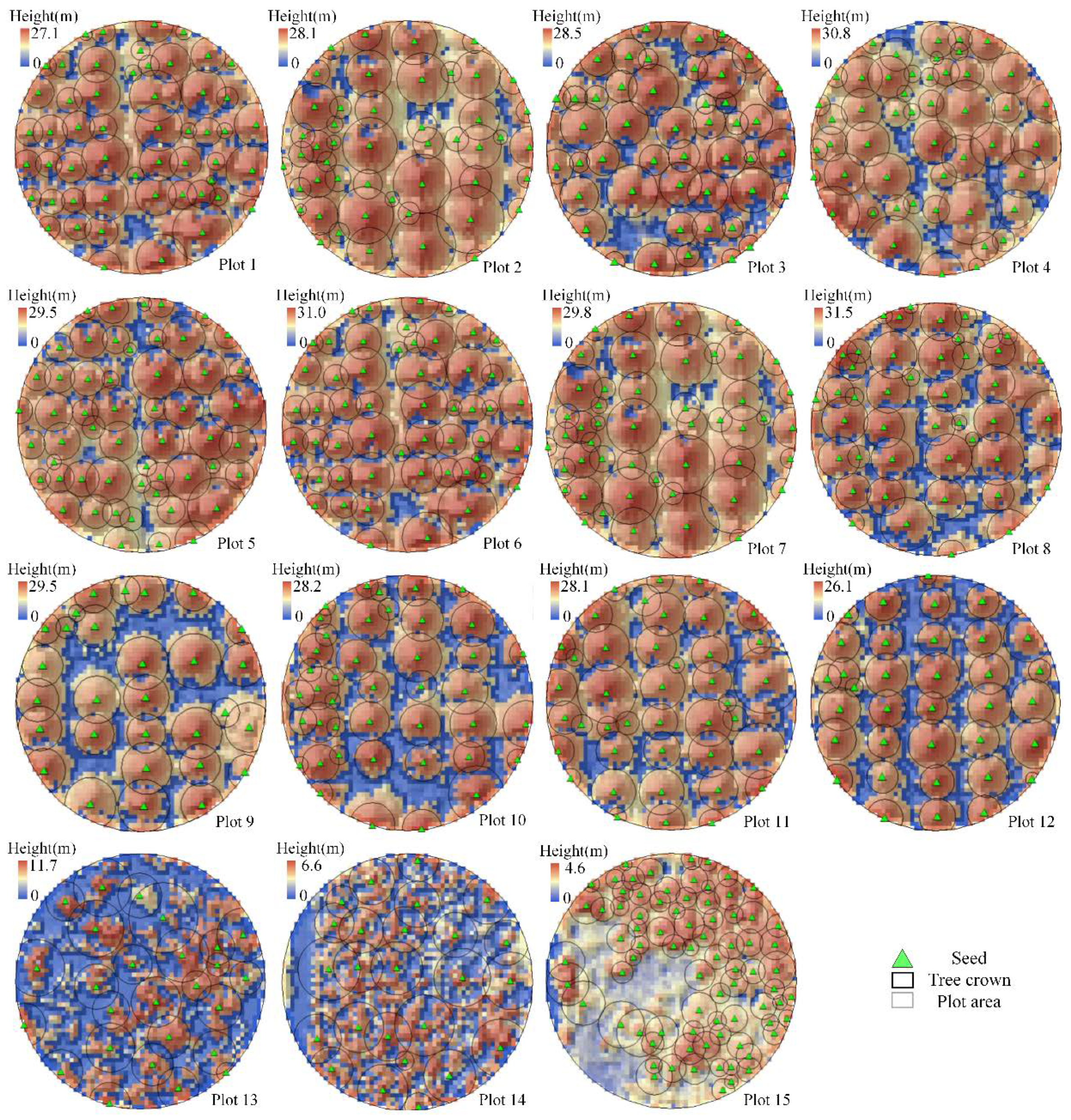
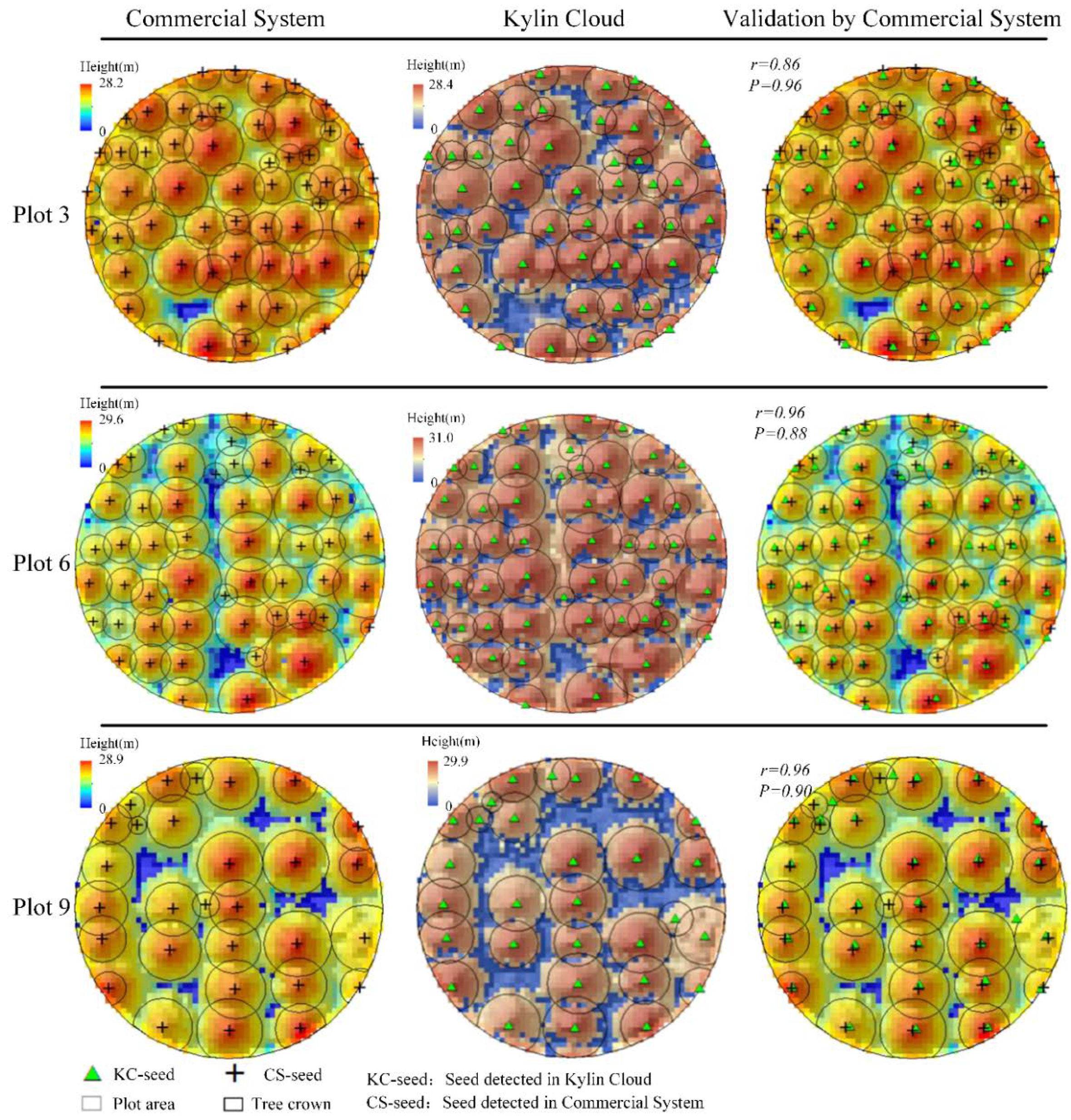
5.2. Comparison of the Individual Tree Segmentation from Different Platforms
- (1)
- If a detected tree center is located in a crown area of ground truth, it is treated as TP.
- (2)
- If more than one detected tree centers (over-segmentation) are located in one crown of ground truth, only one detected tree is treated as TP, and the other ones are treated as FP.
- (3)
- If a detected tree center (under-segmentation) is located in more than one crown area of ground truth, it belongs to the closer crown of ground truth.
- (4)
- If a detected tree center is not located in any crown area of ground truth, it is treated as FP.
- (5)
- If no detected tree center is located in a crown area of ground truth, it is treated as FN.
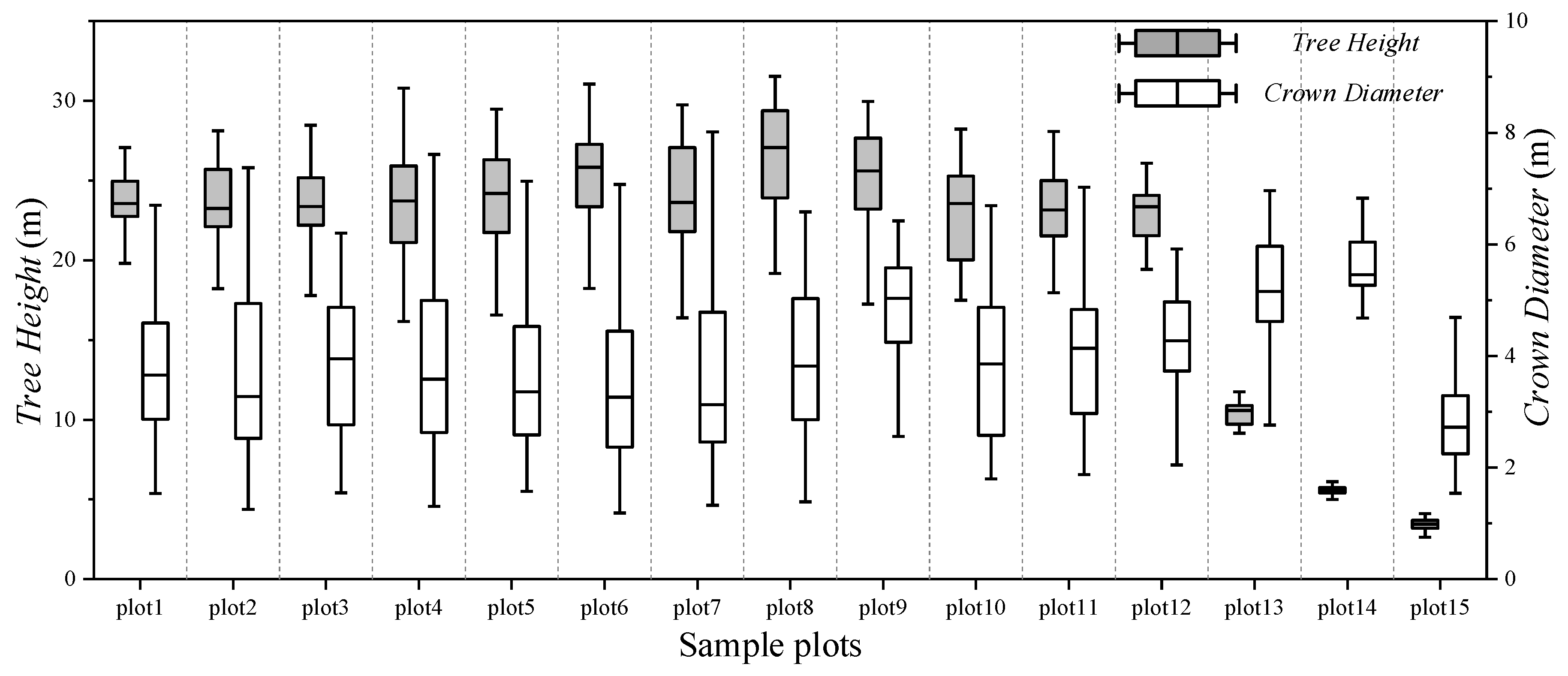
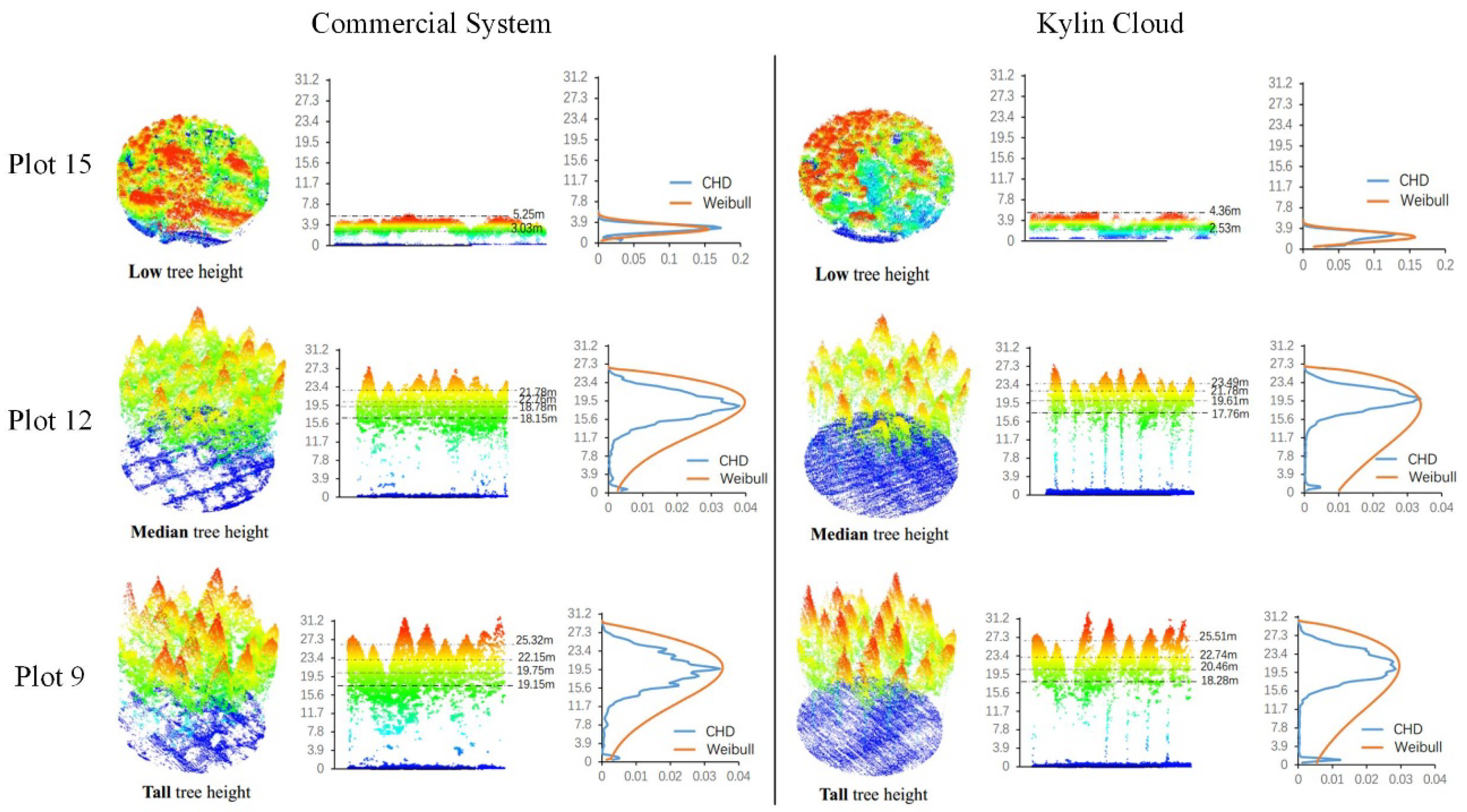
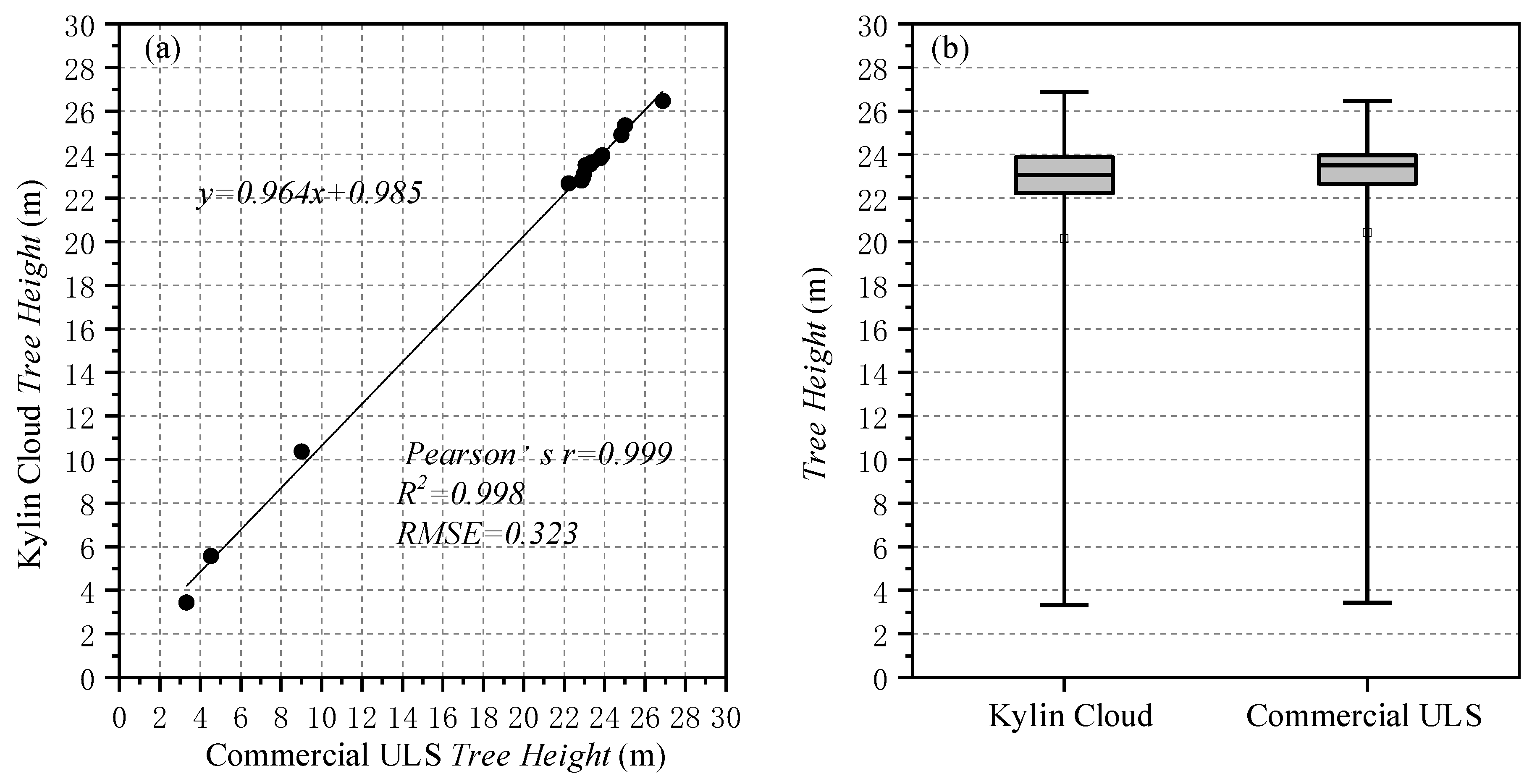
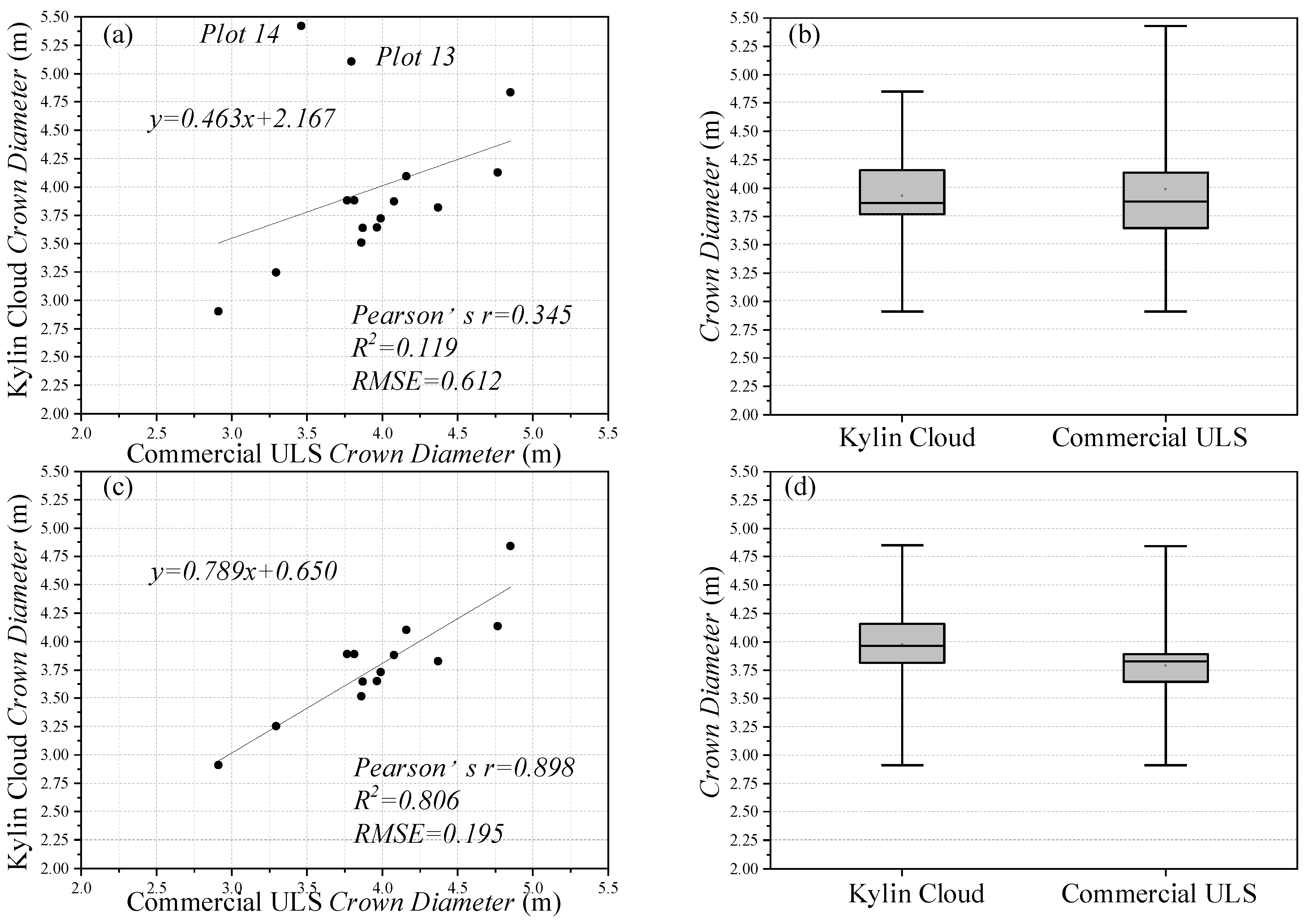
5.3. Comparison of the Individual Tree Characteristics Estimation Using Different Platforms
5.4. Deficiencies and Future Work
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lefsky, M.A.; Cohen, W.B.; Parker, G.G.; Harding, D.J. Lidar remote sensing for ecosystem studies: Lidar, an emerging remote sensing technology that directly measures the three-dimensional distribution of plant canopies, can accurately estimate vegetation structural attributes and should be of particular interest to forest, landscape, and global ecologists. AIBS Bull. 2002, 52, 19–30. [Google Scholar]
- Yang, B.; Dai, W.; Dong, Z.; Liu, Y. Automatic forest mapping at individual tree levels from terrestrial laser scanning point clouds with a hierarchical minimum cut method. Remote Sens. 2016, 8, 372. [Google Scholar] [CrossRef]
- Wang, Y.; Hyyppä, J.; Liang, X.; Kaartinen, H.; Yu, X.; Lindberg, E.; Holmgren, J.; Qin, Y.; Mallet, C.; Ferraz, A. International benchmarking of the individual tree detection methods for modeling 3-D canopy structure for silviculture and forest ecology using airborne laser scanning. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5011–5027. [Google Scholar] [CrossRef]
- Yu, X.; Hyyppä, J.; Litkey, P.; Kaartinen, H.; Vastaranta, M.; Holopainen, M. Single-Sensor Solution to Tree Species Classification Using Multispectral Airborne Laser Scanning. Remote Sens. 2017, 9, 108. [Google Scholar] [CrossRef]
- Eysn, L.; Hollaus, M.; Lindberg, E.; Berger, F.; Monnet, J.-M.; Dalponte, M.; Kobal, M.; Pellegrini, M.; Lingua, E.; Mongus, D. A benchmark of lidar-based single tree detection methods using heterogeneous forest data from the alpine space. Forests 2015, 6, 1721–1747. [Google Scholar] [CrossRef]
- Holopainen, M.; Kankare, V.; Vastaranta, M.; Liang, X.; Lin, Y.; Vaaja, M.; Yu, X.; Hyyppä, J.; Hyyppä, H.; Kaartinen, H. Tree mapping using airborne, terrestrial and mobile laser scanning–A case study in a heterogeneous urban forest. Urban For. Urban Green. 2013, 12, 546–553. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Yu, X. The use of a mobile laser scanning system for mapping large forest plots. IEEE Geosci. Remote Sens. Let. 2014, 11, 1504–1508. [Google Scholar] [CrossRef]
- Unger, D.R.; Hung, I.-K.; Brooks, R.; Williams, H. Estimating number of trees, tree height and crown width using Lidar data. GISci. Remote Sens. 2014, 51, 227–238. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Measuring individual tree crown diameter with lidar and assessing its influence on estimating forest volume and biomass. Can. J. Remote Sens. 2003, 29, 564–577. [Google Scholar] [CrossRef]
- Giannico, V.; Lafortezza, R.; John, R.; Sanesi, G.; Pesola, L.; Chen, J. Estimating stand volume and above-ground biomass of urban forests using LiDAR. Remote Sens. 2016, 8, 339. [Google Scholar] [CrossRef]
- Ene, L.T.; Næsset, E.; Gobakken, T.; Bollandsås, O.M.; Mauya, E.W.; Zahabu, E. Large-scale estimation of change in aboveground biomass in miombo woodlands using airborne laser scanning and national forest inventory data. Remote Sens. Environ. 2017, 188, 106–117. [Google Scholar] [CrossRef]
- Jaakkola, A.; Hyyppä, J.; Kukko, A.; Yu, X.; Kaartinen, H.; Lehtomäki, M.; Lin, Y. A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS J. Photogramm. Remote Sens. 2010, 65, 514–522. [Google Scholar] [CrossRef]
- Liu, K.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Estimating forest structural attributes using UAV-LiDAR data in Ginkgo plantations. ISPRS J. Photogramm. Remote Sens. 2018, 146, 465–482. [Google Scholar] [CrossRef]
- Jaakkola, A.; Hyyppä, J.; Yu, X.; Kukko, A.; Kaartinen, H.; Liang, X.; Hyyppä, H.; Wang, Y. Autonomous collection of forest field reference—The outlook and a first step with UAV laser scanning. Remote Sens. 2017, 9, 785. [Google Scholar] [CrossRef]
- Cao, L.; Liu, H.; Fu, X.; Zhang, Z.; Shen, X.; Ruan, H. Comparison of UAV LiDAR and Digital Aerial Photogrammetry Point Clouds for Estimating Forest Structural Attributes in Subtropical Planted Forests. Forests 2019, 10, 145. [Google Scholar] [CrossRef]
- Guo, Q.; Su, Y.; Hu, T.; Zhao, X.; Wu, F.; Li, Y.; Liu, J.; Chen, L.; Xu, G.; Lin, G. An integrated UAV-borne lidar system for 3D habitat mapping in three forest ecosystems across China. Int. J. Remote Sens. 2017, 38, 2954–2972. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR system with application to forest inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar] [CrossRef]
- Torresan, C.; Berton, A.; Carotenuto, F.; Chiavetta, U.; Miglietta, F.; Zaldei, A.; Gioli, B. Development and Performance Assessment of a Low-Cost UAV Laser Scanner System (LasUAV). Remote Sens. 2018, 10, 1094. [Google Scholar] [CrossRef]
- Skaloud, J. Reliability in direct georeferencing: An overview of the current approaches and possibilities. In Proceedings of the EuroSDR workshop EuroCOW on Calibration and Orientation, Castelldefels, Spain, 25–27 January 2006. [Google Scholar]
- Cucci, D.A.; Rehak, M.; Skaloud, J. Bundle adjustment with raw inertial observations in UAV applications. ISPRS J. Photogramm. Remote Sens. 2017, 130, 1–12. [Google Scholar] [CrossRef]
- Fetić, A.; Jurić, D.; Osmanković, D. The procedure of a camera calibration using Camera Calibration Toolbox for MATLAB. In Proceedings of the 2012 Proceedings of the 35th International Convention MIPRO, Opatija, Croatia, 21–25 May 2012; pp. 1752–1757. [Google Scholar]
- Glennie, C.L.; Kusari, A.; Facchin, A. Calibration and Stability Analysis of the VLP-16 Laser Scanner. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XL-3/W4, 55–60. [Google Scholar] [CrossRef]
- Barfoot, T.D. State Estimation for Robotics; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Shin, E.-H.; El-Sheimy, N. An unscented Kalman filter for in-motion alignment of low-cost IMUs. In Proceedings of the Position Location and Navigation Symposium, Monterey, CA, USA, 26–29 April 2004; PLANS 2004. pp. 273–279. [Google Scholar]
- Forster, C.; Carlone, L.; Dellaert, F.; Scaramuzza, D. On-Manifold Preintegration for Real-Time Visual--Inertial Odometry. IEEE Trans. Robot. 2017, 33, 1–21. [Google Scholar] [CrossRef]
- Yang, Z.; Shen, S. Monocular visual–inertial state estimation with online initialization and camera–IMU extrinsic calibration. IEEE Trans. Autom. Sci. Eng. 2017, 14, 39–51. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Wu, C. SiftGPU: A GPU Implementation of Scale Invariant Feature Transform (SIFT)(2007). Available online: http://github.com/pitzer/siftgpu (accessed on 25 March 2019).
- Wu, C. Towards Linear-Time Incremental Structure from Motion. In Proceedings of the International Conference on 3dtv-Conference, Seattle, WA, USA, 29 June–1 July 2013; pp. 127–134. [Google Scholar]
- Li, J.; Yang, B.; Chen, C.; Huang, R.; Dong, Z.; Xiao, W. Automatic registration of panoramic image sequence and mobile laser scanning data using semantic features. ISPRS J. Photogramm. Remote Sens. 2018, 136, 41–57. [Google Scholar] [CrossRef]
- Kümmerle, R.; Grisetti, G.; Strasdat, H.; Konolige, K.; Burgard, W. g2o: A general framework for graph optimization. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 3607–3613. [Google Scholar]
- Yang, B.; Huang, R.; Dong, Z.; Zang, Y.; Li, J. Two-step adaptive extraction method for ground points and breaklines from lidar point clouds. ISPRS J. Photogramm. Remote Sens. 2016, 119, 373–389. [Google Scholar] [CrossRef]
- Lee, H.; Slatton, K.C.; Roth, B.E.; Cropper Jr, W. Adaptive clustering of airborne LiDAR data to segment individual tree crowns in managed pine forests. Int. J. Remote Sens. 2010, 31, 117–139. [Google Scholar] [CrossRef]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A new method for segmenting individual trees from the lidar point cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- Triggs, B.; Mclauchlan, P.F.; Hartley, R.I.; Fitzgibbon, A.W. Bundle Adjustment—A Modern Synthesis. In Proceedings of the International Workshop on Vision Algorithms: Theory and Practice, Corfu, Greece, 21–22 September 2002; pp. 298–372. [Google Scholar]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. Visual-lidar odometry and mapping: Low-drift, robust, and fast. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2174–2181. [Google Scholar]
- Shin, Y.-S.; Park, Y.S.; Kim, A. Direct Visual SLAM using Sparse Depth for Camera-LiDAR System. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 1–8. [Google Scholar]
- Gneeniss, A.; Mills, J.; Miller, P. In-flight photogrammetric camera calibration and validation via complementary lidar. ISPRS J. Photogram. Remote Sens. 2015, 100, 3–13. [Google Scholar] [CrossRef]
- Holmgren, J.; Persson, Å.; Söderman, U. Species identification of individual trees by combining high resolution LiDAR data with multi-spectral images. Int. J. Remote Sens. 2008, 29, 1537–1552. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Manufacturer | Description | Approximate Price |
|---|---|---|---|
| GNSS receiver (Base) | M8 made by KQ GEO Technologies * | Double frequency, supporting BDS/GPS/GLONASS | 1500 USD |
| GNSS receiver (Rover) | P8 made by KQ GEO Technologies * | Double frequency, supporting BDS/GPS/GLONASS | 1500 USD |
| IMU | Xsens MTI-300 | Gyroscope in-run bias stability is 12°/h; accelerometer in-run bias stability is 0.015 mg | 2500 USD |
| Global shutter camera | Pointgrey Flea3 | 1280 × 1024 pixels, color, with a pixel size of 5.3 µm | 1000 USD |
| Laser scanner | Velodyne VLP16 | 16 channels; 300,000 points per second; 905 nm wavelength; 100 m measurement range | 6000 USD |
| Lens | Kowa wide-angle lens | 3.5 mm/F1.4 | 200 USD |
| Plot ID | Reference Trees | Detected Trees | TP1 | FN2 | FP3 | recall | Precision | F-Measure |
|---|---|---|---|---|---|---|---|---|
| 1 | 50 | 46 | 43 | 7 | 3 | 0.86 | 0.93 | 0.89 |
| 2 | 53 | 50 | 46 | 7 | 4 | 0.87 | 0.92 | 0.89 |
| 3 | 51 | 46 | 44 | 7 | 2 | 0.86 | 0.96 | 0.91 |
| 4 | 37 | 44 | 34 | 3 | 10 | 0.92 | 0.77 | 0.84 |
| 5 | 50 | 53 | 48 | 2 | 5 | 0.96 | 0.91 | 0.93 |
| 6 | 48 | 52 | 46 | 2 | 6 | 0.96 | 0.88 | 0.92 |
| 7 | 40 | 50 | 38 | 2 | 12 | 0.95 | 0.76 | 0.84 |
| 8 | 40 | 46 | 36 | 4 | 10 | 0.90 | 0.78 | 0.84 |
| 9 | 27 | 29 | 26 | 1 | 3 | 0.96 | 0.90 | 0.93 |
| 10 | 26 | 35 | 24 | 2 | 11 | 0.92 | 0.69 | 0.79 |
| 11 | 34 | 40 | 33 | 1 | 7 | 0.97 | 0.83 | 0.89 |
| 12 | 34 | 35 | 33 | 1 | 2 | 0.97 | 0.94 | 0.95 |
| 13 | 52 | 26 | 25 | 27 | 1 | 0.48 | 0.96 | 0.64 |
| 14 | 53 | 26 | 25 | 28 | 1 | 0.47 | 0.96 | 0.63 |
| 15 | 78 | 75 | 65 | 13 | 10 | 0.83 | 0.87 | 0.85 |
| Overall | 673 | 653 | 566 | 107 | 87 | 0.84 | 0.87 | 0.85 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Yang, B.; Cong, Y.; Cao, L.; Fu, X.; Dong, Z. 3D Forest Mapping Using A Low-Cost UAV Laser Scanning System: Investigation and Comparison. Remote Sens. 2019, 11, 717. https://doi.org/10.3390/rs11060717
Li J, Yang B, Cong Y, Cao L, Fu X, Dong Z. 3D Forest Mapping Using A Low-Cost UAV Laser Scanning System: Investigation and Comparison. Remote Sensing. 2019; 11(6):717. https://doi.org/10.3390/rs11060717
Chicago/Turabian StyleLi, Jianping, Bisheng Yang, Yangzi Cong, Lin Cao, Xiaoyao Fu, and Zhen Dong. 2019. "3D Forest Mapping Using A Low-Cost UAV Laser Scanning System: Investigation and Comparison" Remote Sensing 11, no. 6: 717. https://doi.org/10.3390/rs11060717
APA StyleLi, J., Yang, B., Cong, Y., Cao, L., Fu, X., & Dong, Z. (2019). 3D Forest Mapping Using A Low-Cost UAV Laser Scanning System: Investigation and Comparison. Remote Sensing, 11(6), 717. https://doi.org/10.3390/rs11060717