1. Introduction
With seemingly continuous advancements in remote sensing technologies, there is a following trend for forestry and conservation organizations to demand deeper understandings over larger-scale areas of forest than was previously possible using conventional field measurement techniques. Individual tree level inventories have been possible for some time with remote sensing techniques; however, further research and refinement is needed for these ultra-high-resolution systems to become practical for widespread application. Improving how forests are measured may help the forestry supply chain to extract more value from a given forest stand, as potential saw logs (high value), which may not be identified as such, may be turned into wood chips (low value) unnecessarily if information about the stand being harvested is of poor quality. It remains common practice for forest plots to be measured using measuring tapes, calipers, and similar basic tools, however, this is changing quickly.
Unmanned aerial systems (UAS) are increasingly being adopted for use in forestry and ecosystem monitoring applications due to their time efficiency, low operating costs, and wide-ranging applications [
1,
2]. There exists a considerable volume of research on flying UAS above forest canopies that provides evidence of their utility; however, it is commonly seen that where forest canopies are dense, forest under-story structures and individual stem characteristics are often occluded by the canopy [
3,
4,
5]. A common work-around for this issue is to build models to relate ground-based field measurements to datasets acquired through aerial photogrammetry (AP) or aerial laser scanning (ALS) [
6,
7].
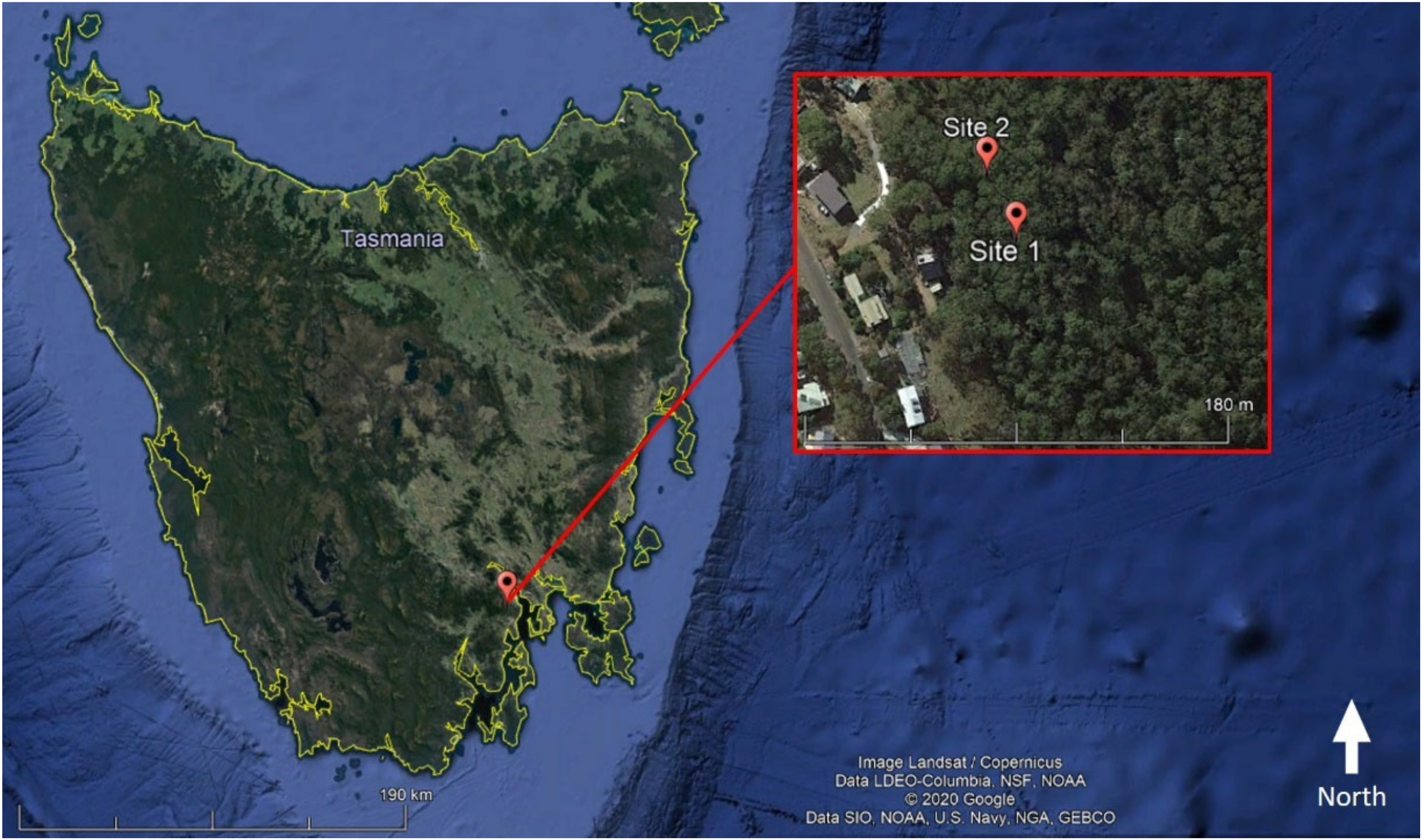
Ground-based techniques including manual field measurement, terrestrial laser scanning (TLS), and terrestrial photogrammetry (TP) are time consuming and thus expensive processes; however, they also pose access and worker safety issues in areas of dense undergrowth. Forest management practices vary considerably around the world; however, rugged terrain and dense undergrowth is common in Australian forest sites where this study was based.
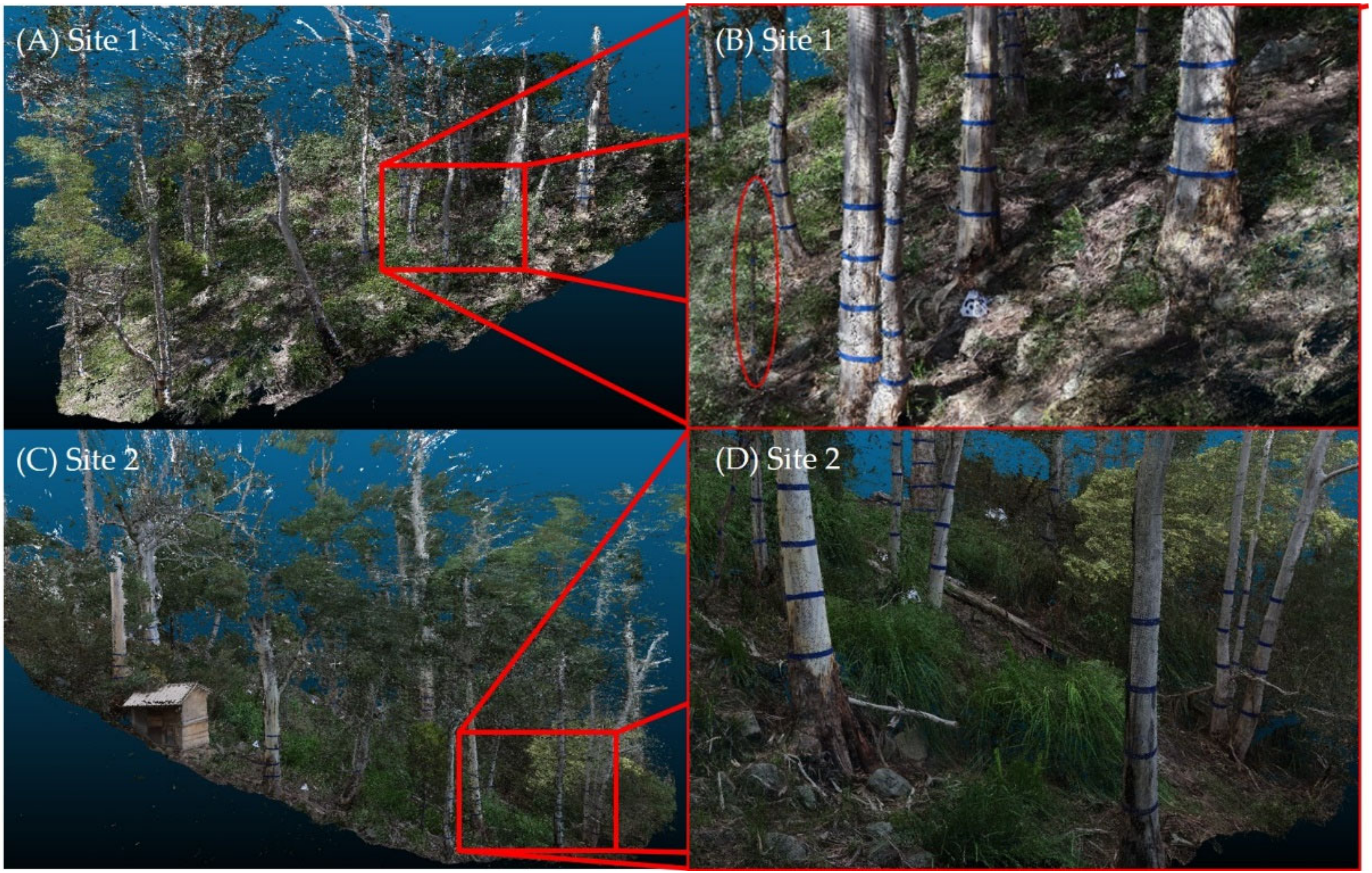
Figure 1 shows two examples of the conditions commonly faced in Australian plantation forests. Slips, trips, and falls are among the leading causes of forestry workplace injuries [
8,
9]. Under-canopy UAS-based remote sensing of forests has the potential to reduce or eliminate forestry workers’ exposure to such safety risks by enabling plot measurements and habitat assessments to be performed from safer locations with less challenging terrain (e.g., at a roadside).
Aside from safety concerns in some areas, manual field measurements and TLS both tend to be relatively slow, costly, and, in the case of TLS, require considerable expertise to implement effectively. While the same can be said about the required expertise to operate UAS currently, UAS-based approaches are well suited to becoming entirely automated. While terrestrial mapping (TLS, TP) can be performed by ground-based robots [
10,
11], rugged terrain and dense undergrowth can make it more practical to simply fly over the rough terrain. It is easy to envisage such a system where an autonomous ground vehicle (such as a truck) could act as a mobile base station for a fleet of UAS, which can autonomously map areas of forest in unprecedented detail as originally suggested by Jaakkola et al. [
12]. To progress towards this vision, it is necessary to explore the efficacy and accuracy of using existing UAS and sensors to map forests beneath the canopy.
There have been few studies so far to explore the use of under-canopy UAS [
13,
14,
15,
16,
17,
18,
19]. The existing studies can be grouped into either primarily forest mapping or autonomous navigation-focused studies. Note that while autonomous navigation typically requires mapping to occur, it is necessary to distinguish between navigation-grade maps (for autonomous flight) or forest measurement-grade maps. Such map types have different requirements based on processing time, the type of sensors used, and the power of on-board computing on the UAS. For navigation purposes, granularity is traded off in favor of rapid processing, as map generation is usually needed in real time. Forest measurement-grade maps on the other hand, can have longer processing/optimization times as they are not restricted by real-time map generation requirements or limitations imposed by light-weight on-board computer systems. Thus, they can be of considerably finer granularity than their real-time counterparts.
Four autonomous navigation-focused studies on under-canopy UAS were found in our search [
16,
17,
18,
19]. While autonomous navigation will be highly beneficial and possibly even essential for the widespread implementation of under-canopy UAS, our study was not focused on the autonomy aspects; instead, our study focused on the problem of mapping the forest using under-canopy UAS.
The under-canopy UAS studies which focus on mapping include the work by [
13,
14,
15]. The most similar research to ours was performed by Kuželka et al. [
13], who tested a Dà-Jiāng Innovations (DJI) Phantom 4 and DJI Mavic Pro for under-canopy AP of a forest in the Czech Republic with Global Navigation Satellite System (GNSS) based scaling of their point clouds.
Kuželka et al. [
13] also looked at the effect of the number of photos of a stem on the diameter accuracy, which led us to the question: How do we quantify the point cloud coverage in the region of each diameter measurement in any dense point cloud of a forest irrespective of the sensor used? Literature on diameter measurement in forest point clouds was searched to find articles which were quantifying the coverage of points around a stem where a diameter measurement was being taken. Bienert et al. [
20] introduced a term called “reliability factor”, which was intended to detect over-/under-estimated diameter measurements. As part of their reliability factor, they mention the angle of the visible circle section. However, the measurement of this parameter is not explicitly defined. The term “coverage” was used in [
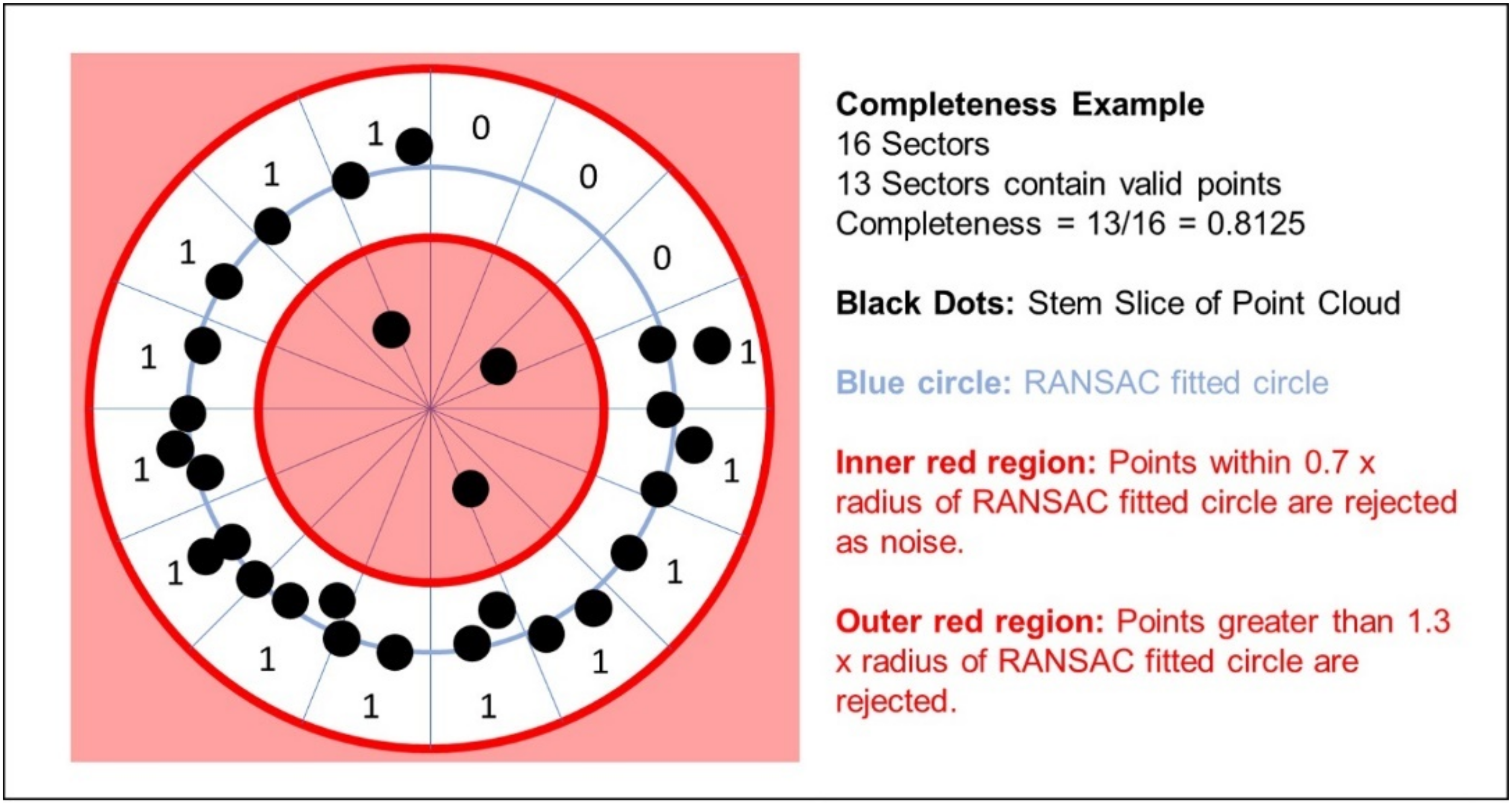
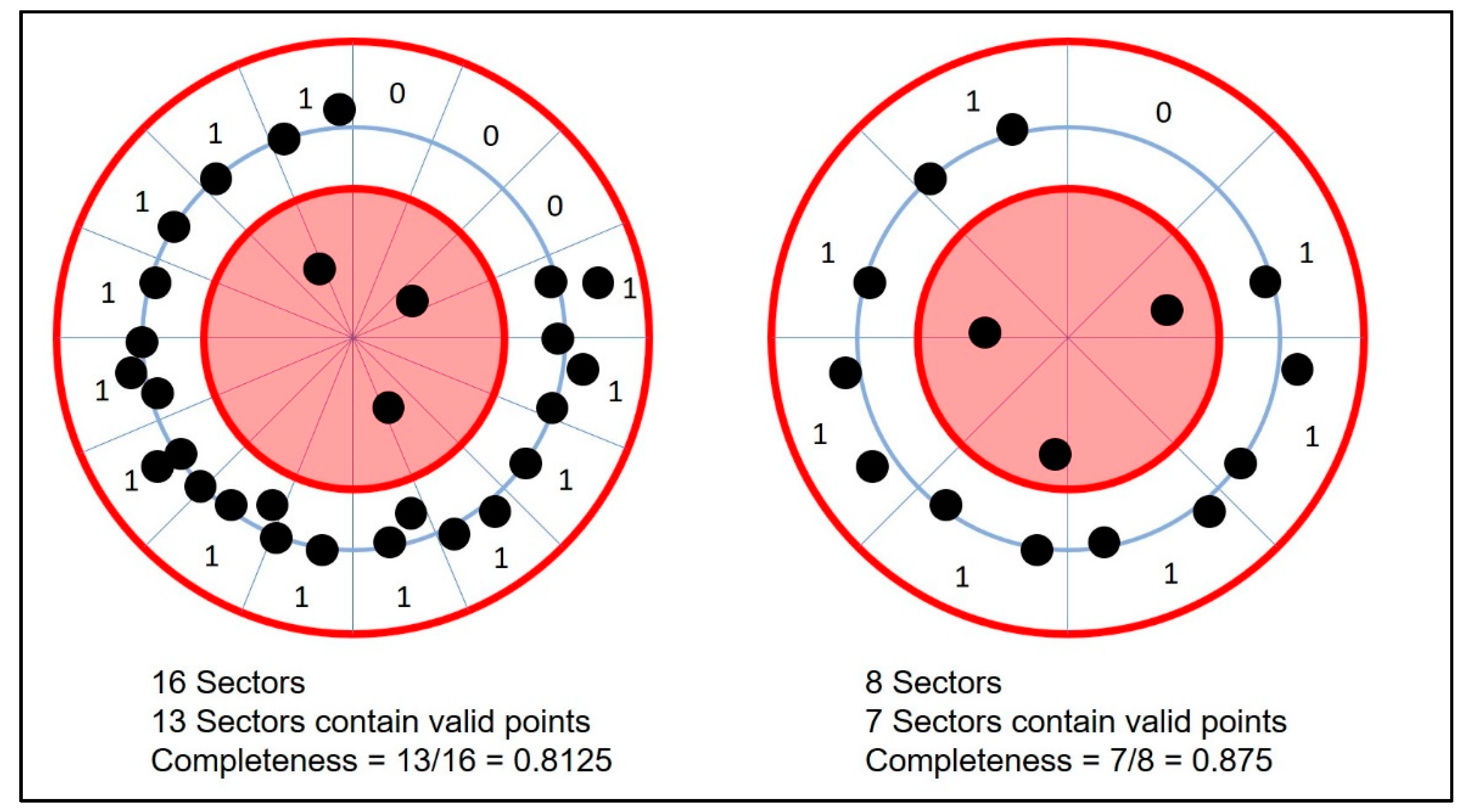
21] in the context of the coverage of points around a stem measurement; however, it was also unclear how this was defined in their study. Quantifying the proportion of a stem represented by points where a measurement is taken is important to understand the coverage of a forest in a given point cloud. Therefore, we proposed a clearly defined term called Circumferential Completeness Index (CCI) with the intention that future forest point cloud research can use a consistent and broadly applicable measure to quantify how thoroughly a section of forest has been mapped. This measure is defined in detail in the methodology and results sections; however, it serves to quantify the proportion of a full circle represented by points in a stem slice. In the case of a single-scan TLS point cloud of a forest, all stems would have a CCI less than 0.5, as slightly less than half of the stems could have been mapped by the sensor. It serves to quantify the difference between trees which were well mapped (such as at the center of a plot) against trees which may have been poorly mapped (such as at the edges of a plot or those which were partially obscured during mapping).
The purpose of this study was to build understanding of the challenges and limitations of using an existing off-the-shelf UAS platform for under-canopy forest mapping in complex forests in order to steer future research towards solutions to these challenges. This study also served as a means of understanding how effective an off-the-shelf UAS can be for this application, providing a baseline from which purpose-built under-canopy forest mapping UAS can improve upon. A detailed methodology is provided to enable replication of this study or use of these techniques, and the CCI measure is explicitly defined to enable comparisons of forest coverage between different high-resolution forest mapping devices.
3. Results
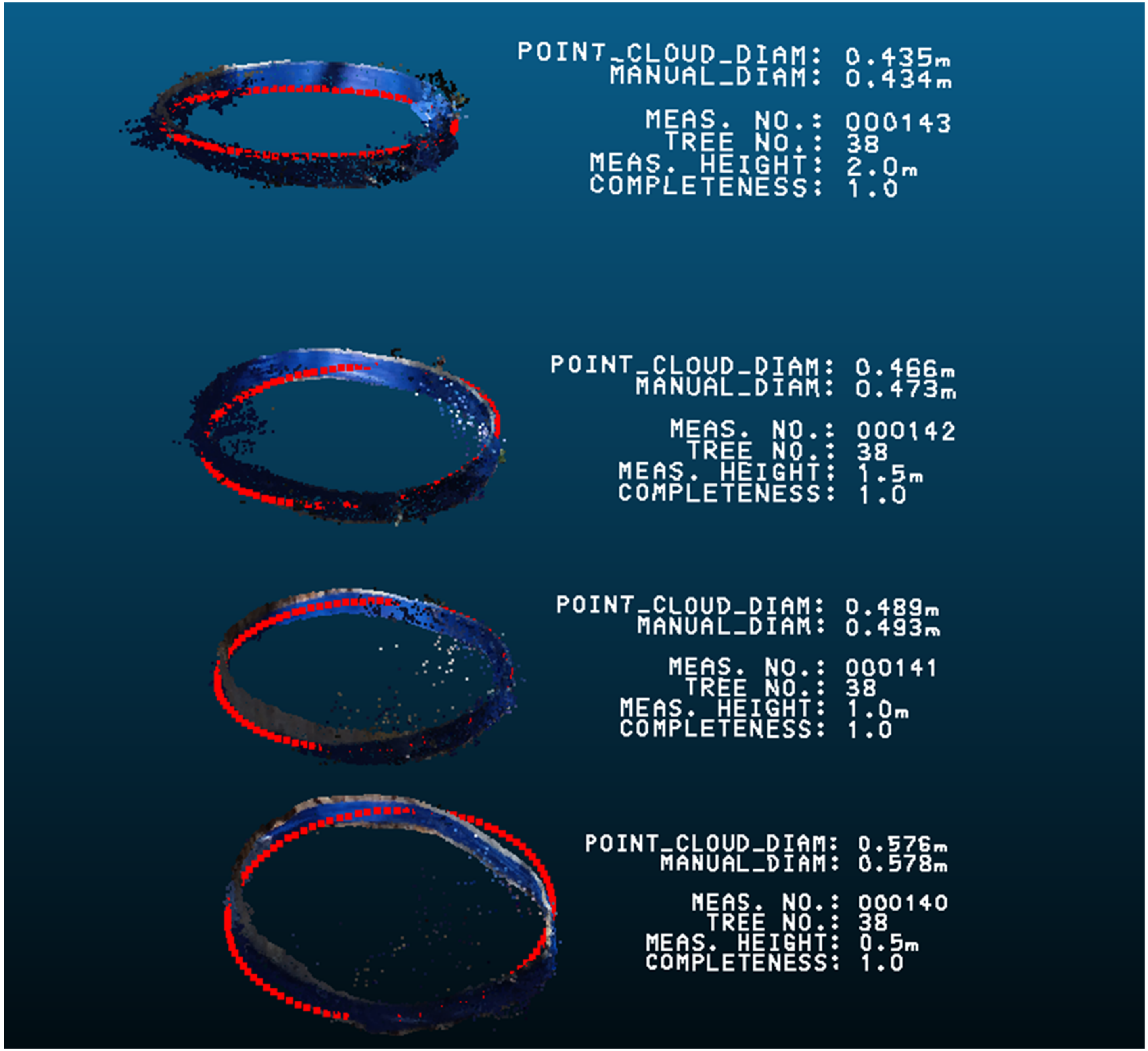
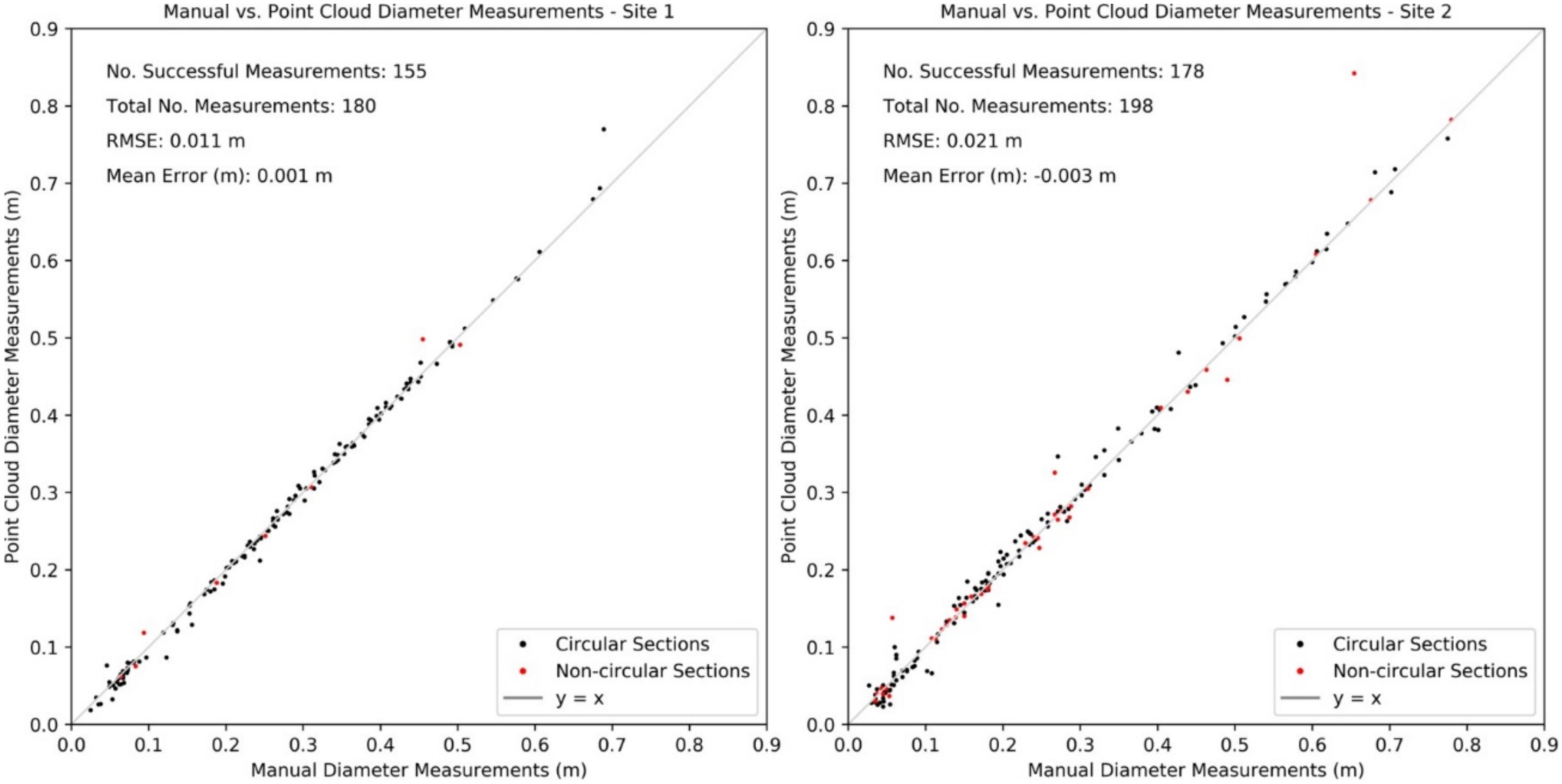
In the Site 1 point cloud, 155 out of 180 taped diameter measurements were successfully detected in the point cloud. In the Site 2 point cloud, 178 out of 198 taped diameter measurements were successfully detected. In total, 333 out of 378 taped sections were detected, giving a detection rate of 88% at the individual measurement level. At the individual tree level, all measured trees within the two sites were visually identifiable in the point cloud; however, measurements were not able to be taken from all stems due to the absence of a clear stem circle in the point cloud. There were two trees where none of the four diameter measurements could be taken, one in each site. In Site 1, the unmeasurable tree had a diameter of 4.8 cm at 1.5 m height, and at Site 2, the unmeasurable tree had a diameter of 5.4 cm at 1.5 m height. If we consider a stem to be “detected”, if it has at least one measurable stem circle at a taped section, there was a 97.8% tree level detection rate in Site 1 and a 98.0% tree level detection rate in Site 2.
The root-mean-squared errors (RMSE) of the successful diameter measurements were 11 mm and 21 mm for Sites 1 and 2, respectively. Site 1 had a mean diameter error of +1 mm and Site 2 had a mean diameter error of −3 mm. These results are visualized as scatterplots of manual tape-based measurements of diameter versus the point cloud-based measurements of diameter in
Figure 10.
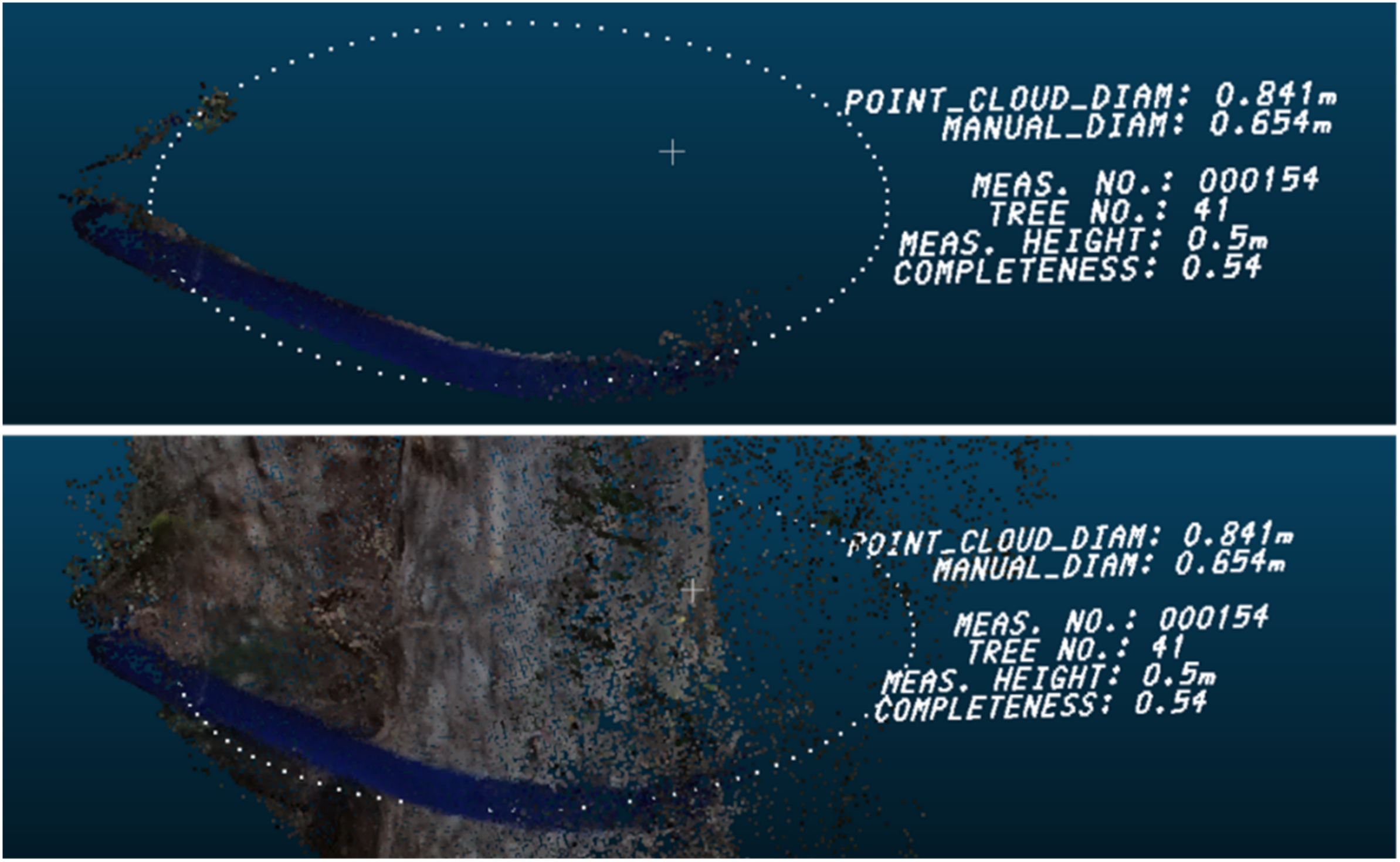
In Site 1, nine of the 180 diameter measurements were noted as noncircular. In Site 2, 40 out of the 198 diameter measurements were noted as noncircular. An example of a noncircular stem from Site 2 is shown in
Figure 11, where a tree was forked near ground level resulting in a peanut-shaped cross-section. The point cloud-based diameter measurement was 0.841 m at 0.5 m height, compared to the measuring tape-based manual diameter measurement of 0.654 m. It is also worth noting the CCI of the stem. Even though the circle was a sub-optimal model for fitting due to the noncircular shape of the stem, the CCI was still reasonable for the cross-section, suggesting that 54% of the stem circumference had been mapped at that cross-section.
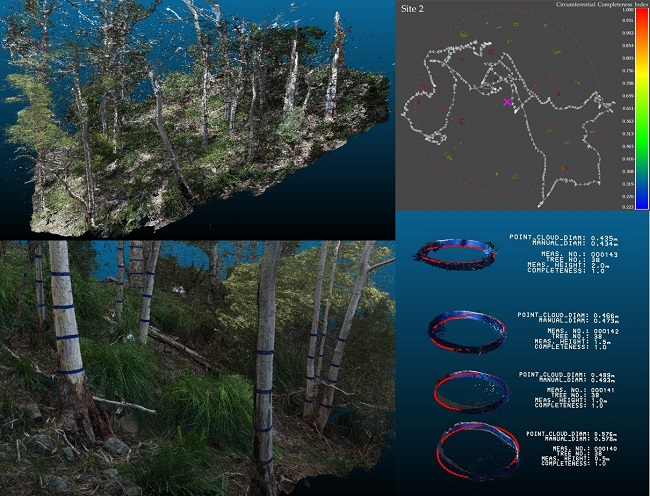
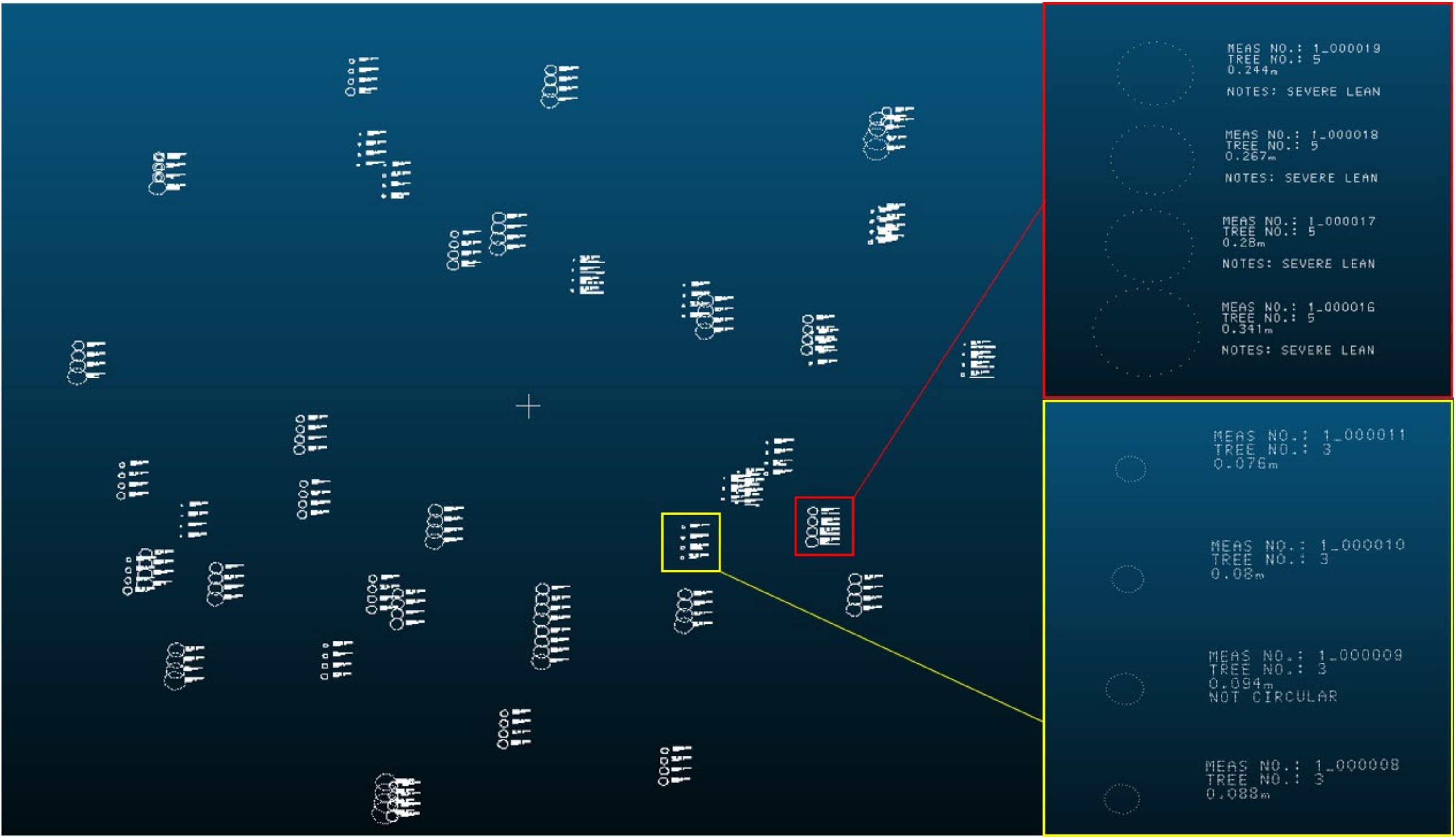
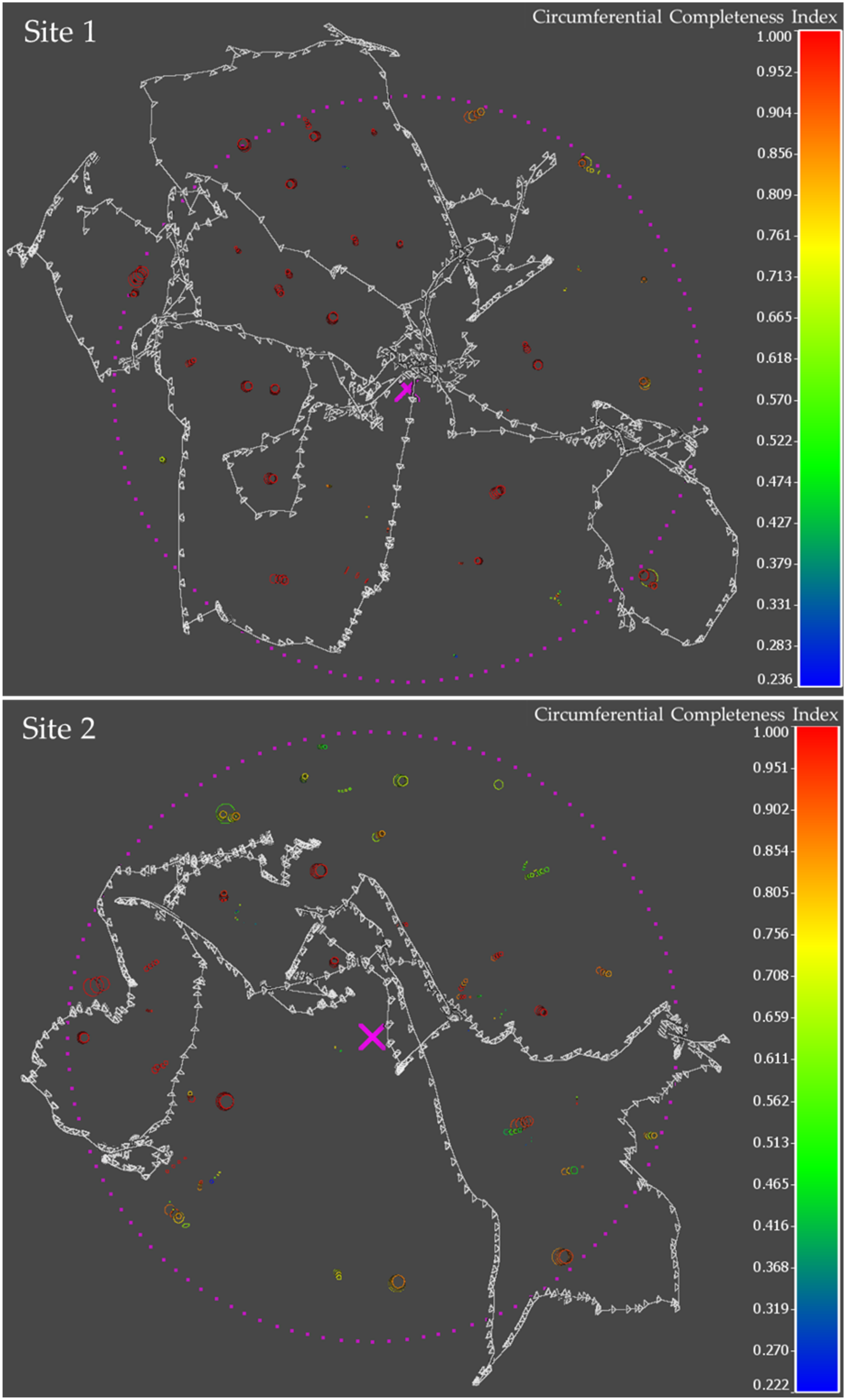
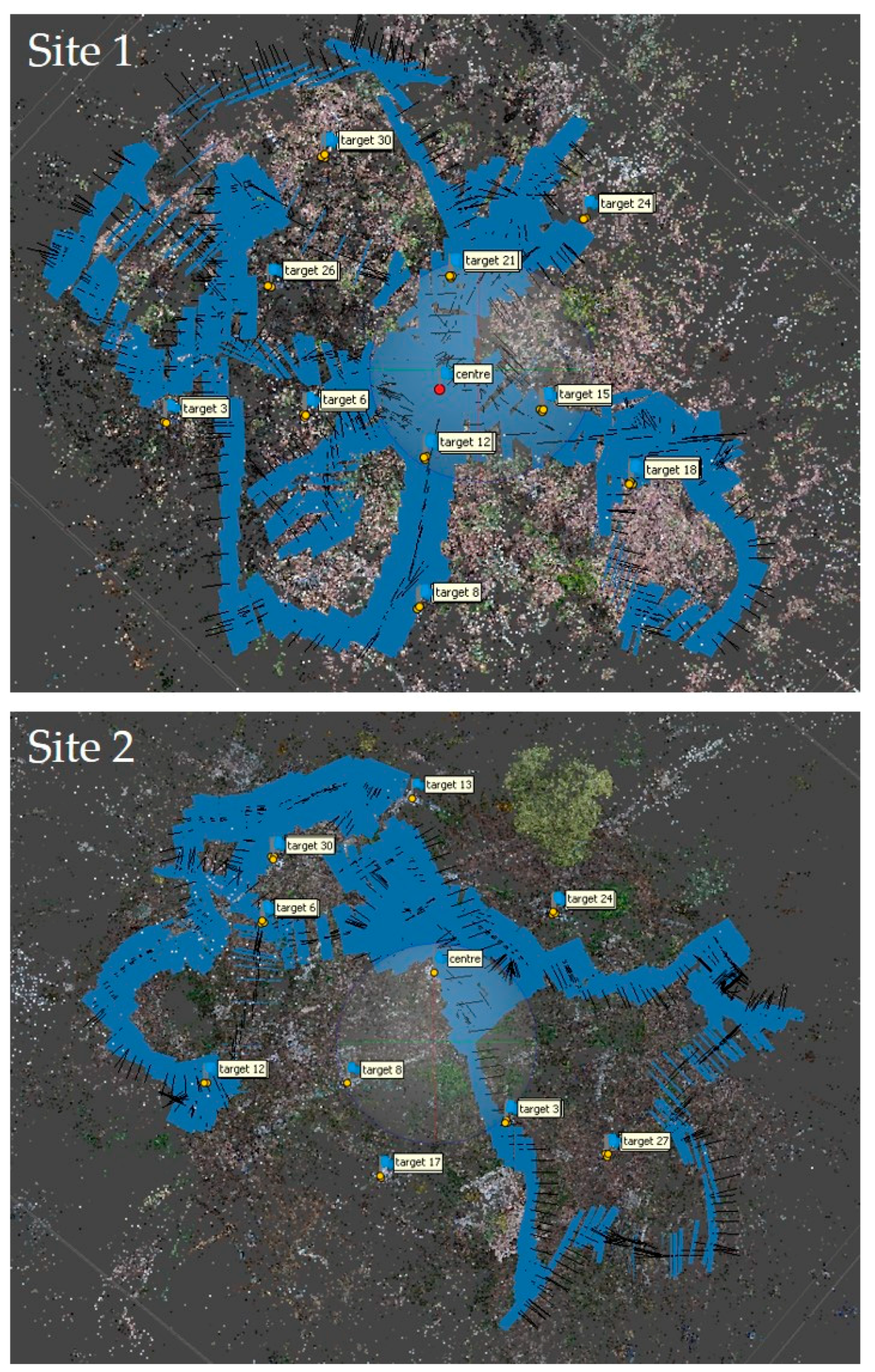
In
Figure 12, CCI is visualized in the context of stem locations and the flight paths/camera orientations. The stems were visualized by RANSAC fitted circles, colored by the CCI of each diameter measurement. The CCI was high for stems seen by many photos and low in areas with fewer photos, as expected. It is important to note that there were areas in both Sites 1 and 2 which were unflyable due to the presence of dense vegetation. Stems within these areas had a lower CCI as they could not be seen from all angles and were imaged from further away.
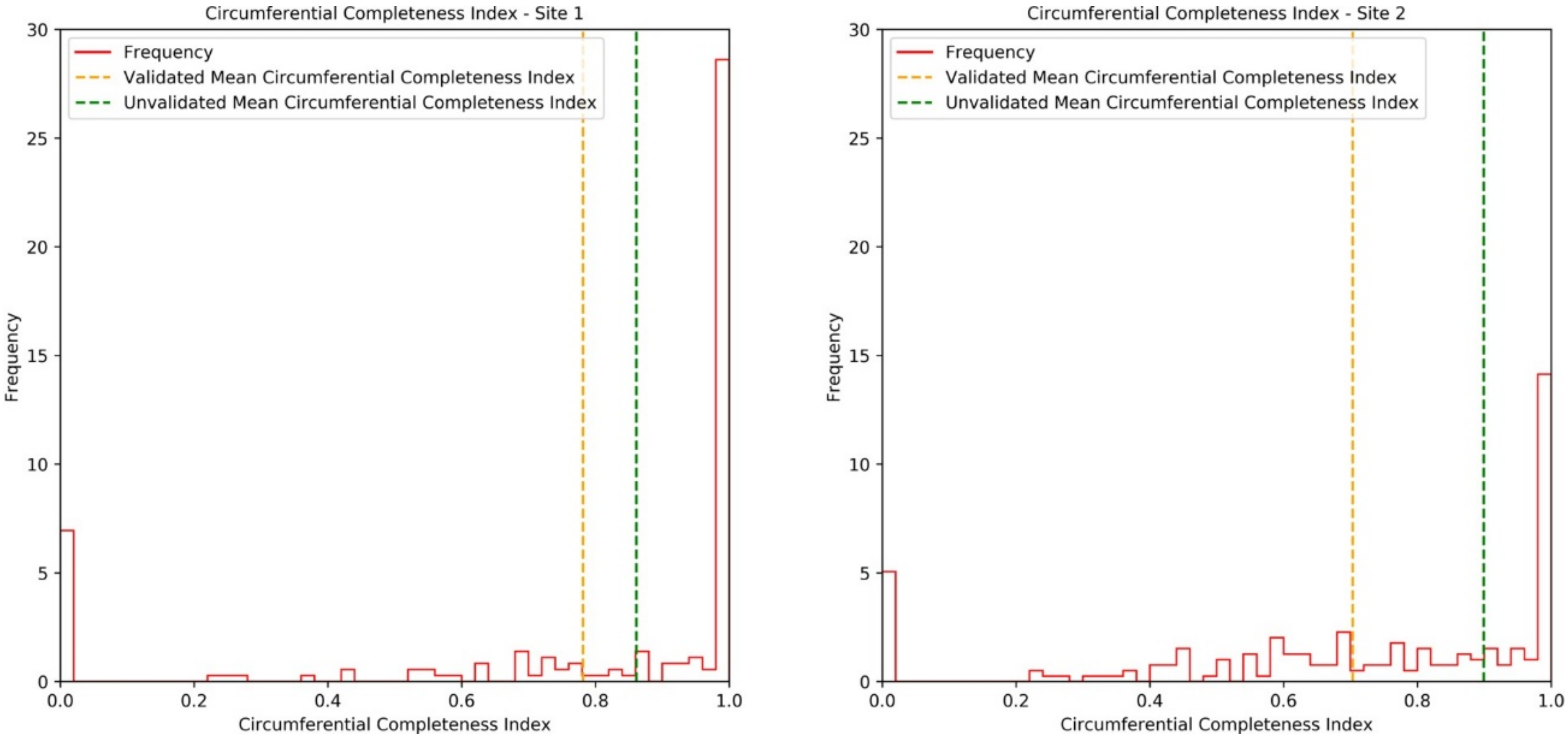
The validated mean CCI values were 0.78 for Site 1 and 0.70 for Site 2. The validated and unvalidated median CCI values for Site 1 were 1.0, meaning that greater than half of the point cloud measurements taken had complete circles of points around the tree. The validated median CCI for Site 2 was 0.78 and the unvalidated median CCI was 1.0. Histograms are shown for both sites in
Figure 13 to visualize the distribution of CCI under the differing site conditions. A well-mapped section of forest would be skewed to the right in these plots and a poorly mapped region would be skewed to the left. It was expected that Site 2 would be less complete overall due to the dense understory and reduced flyable space, making the mapping process more difficult than in Site 1.
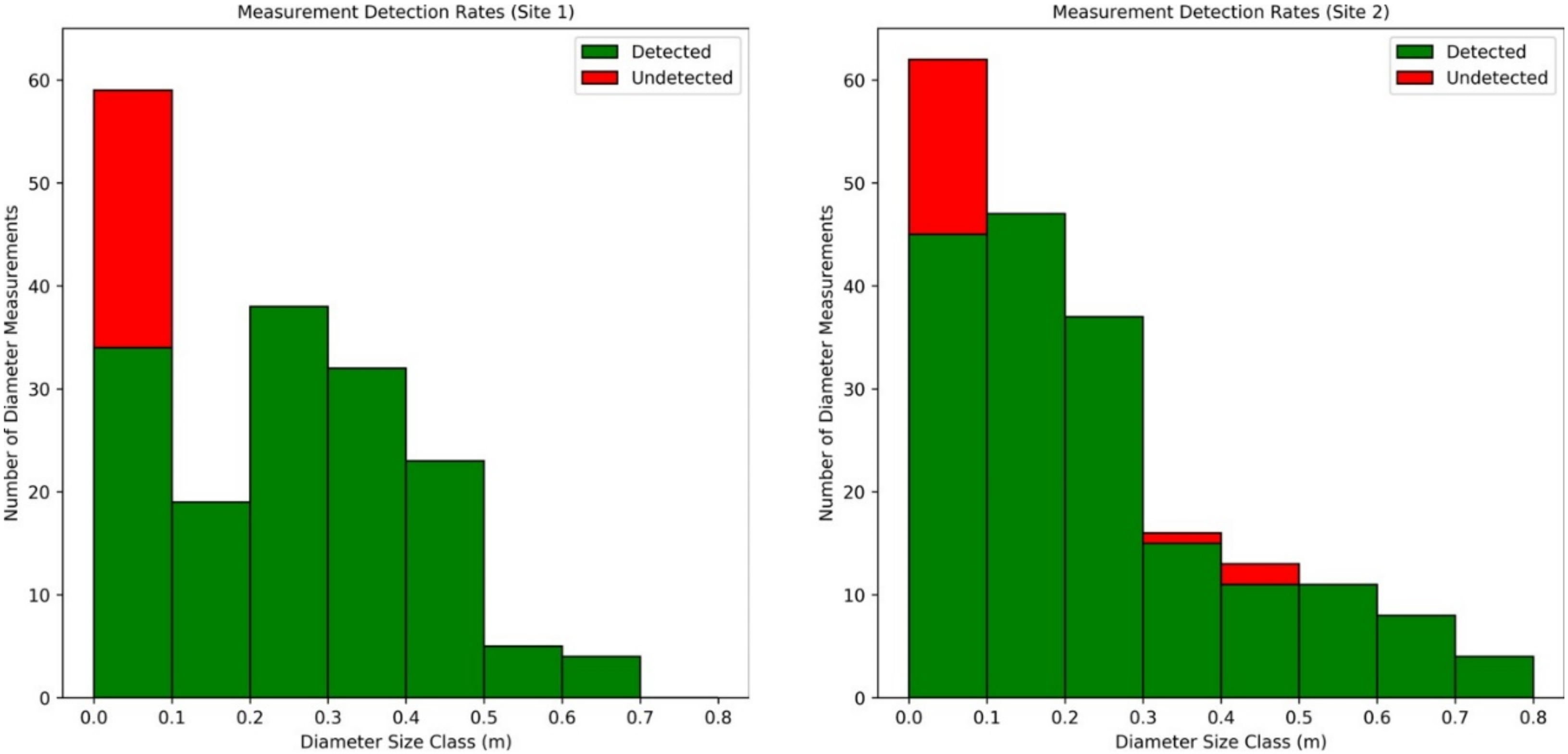
As a result of the dense understory in parts of Site 2, some larger measurements were obscured by vegetation and were not reconstructed. In both sites, the majority of undetected measurements were in the 0.0–0.1-m-diameter size class. This is shown in
Figure 14.
4. Discussion
Prior under-canopy UAS-based studies achieved root-mean-squared errors of diameter measurements (relative to manual measurements) of 41 mm with AP [
15] and 78 mm with 2D Light Detection and Ranging (LiDAR) [
14]. The most comparable study to ours was performed by Kuželka et al. [
13]. They tested their approach on two 50 × 50 m-square plots, with stem densities of 290 and 270 for each respective plot. Their study was performed in sites with no understory and generally flat topography. Our study differed considerably with respect to forest conditions, with a diverse mix of tree species, a complex understory, rocks and boulders, and rough, steep (24° average slope) terrain. They obtained RMSEs (relative to field measurements) of 48.7 mm for point cloud-based diameter measurements using least squares circle fitting (the most comparable diameter measurements to our method).
It is also interesting to compare these results to other remote sensing techniques such as TLS and TP. Piermattei et al. [
28] used a tripod-mounted Digital Single Lens Reflex (DSLR) camera and compared their TP point clouds against TLS point clouds and caliper-based reference measurements as a baseline. They reported RMSEs for diameter at breast height (DBH) measurements of 12.1 mm, 20.7 mm, 50.7 mm, and 40.2 mm for TP measurements and RMSE values of 8.7 mm, 37.5 mm, 13.8 mm, and 11.3 mm for TLS vs. caliper reference measurements. We measured RMSEs of 11 mm and 21 mm in Site 1 and Site 2, respectively, relative to tape-based diameter measurements. Based on these results, our approach was comparable to both TP and TLS at measuring diameter and was notably more accurate than the prior under-canopy UAS studies, including one using a similar UAS platform. The reason for such accuracy in our study was likely due to the use of the tape-marked measurements effectively eliminating the additional errors caused by comparing manually measured heights above ground against DTM-based heights above ground. In this study it was possible to confidently measure diameter at the same position on the tree as when measured manually without relying on a DTM for height above ground due to the blue tape marks. This may play an important role in quantifying the RMSE of diameter measurements, as the research team minimized the error in the measurement height that would influence the error in the diameter measurement. In simple terrain with gradual changes in slope, the DTM-based measurement height may align well with field-based measurement height; however, in the study sites chosen for this work, it was challenging to define a rule (even in the manual field measurements) which would work consistently for all cases in the sites due to rocks and frequent, sharp changes in local slope. Measurement accuracy, while important, is not the only necessary consideration when choosing remote sensing technologies for an application. Practicality, time cost, sensor cost, and completeness of the data contribute to how useful a given approach is.
From a practicality standpoint, the test conditions of our study involved a dense understory, high stem density, and a steep slope, and our UAS-based methodology was highly effective in minimizing the need to traverse this terrain. While coded targets were placed in the field to help with the image alignment process, they were able to be placed in the most easily accessible parts of the sites (which conveniently also tend to be the most visible regions for such a target to be placed), allowing the operator to avoid traversal of the most difficult terrain. It should be noted that even with the placement and retrieval of these targets, there is considerably less terrain traversal required compared to TP. To appreciate the reduction in terrain traversal despite the placement of targets, we could consider the acquisition time of up to 2 h for similar plot sizes with TP in [
28], against the 5–10 min per plot to place and retrieve the coded targets in our study. The use of such coded targets should be considered a short-term work-around until photogrammetry or similar remote sensing techniques can work reliably in these conditions without such targets.
The reliance upon GNSS for scaling of under-canopy AP point clouds is not going to work in all forest situations. GNSS was highly effective for providing scale under the tested conditions as well as the test conditions in [
13]. HHowever, GNSS signal is commonly degraded or entirely absent under dense forest conditions [
29]. In the short term, ground control points with known distances or scaled targets will need to be used in sites with insufficient GNSS reception. For scaling of photogrammetric point clouds, stereo cameras and visual inertial systems show promise in this area and may offer low-cost solutions to this problem in the near future.
In terms of time cost, our image capture process required 20 min per flight with an additional 5–10 min to place and retrieve the coded targets. Photogrammetric processing of the data was mostly automated in Agisoft Metashape (some minor image alignment corrections were required). Our post-processing of the point cloud was time consuming due to the manual trimming of the tape circles; however, this would not be performed outside of this study, as this was only used for the purposes of measuring the accuracy of diameter measurement without the influence of a DTM. Instead, it is suggested to perform post-processing of the point cloud with partially automated tools, such as 3D Forest [
30] or Computree [
31], until fully automated and reliable tools become available.
In terms of sensor cost, a DJI Phantom 4 costs $2400 Australian Dollars (AUD) at the time of writing, comparable to a decent DSLR camera and lens. A TLS system can be well upwards of $30,000 AUD, although exact pricing is seldom advertised online.
In terms of completeness of the data, we suggest that Circumferential Completeness Index (CCI) be reported as a standard measure in future research using diameter measurements of forest point clouds such that the overall coverage of a study site, as well as coverage of individual stems, can be better communicated among the scientific community. The sites studied in this work had validated mean CCI of 0.78 and 0.7 and unvalidated mean CCI of 0.86 and 0.89 for Sites 1 and 2, respectively. Future work which uses CCI is expected to mostly report the unvalidated mean CCI, as this only requires a point cloud and does not require manual field measurements. We suggest that alongside the unvalidated CCI, the most meaningful way to communicate this measure is to provide a histogram to show the distribution of CCIs for the successful diameter measurements, as shown in
Figure 14.
A limitation of CCI is that it is context dependent and there are stem shapes which will not provide a meaningful CCI value. It is based on the fitting of a circle to the stem and so may not work reliably for highly noncircular stems, such as the example shown in
Figure 12. In this case, a stem with a peanut-shaped cross-section resulted in a poor circle fit and this would have had an impact upon the measurement of completeness. With that said, the CCI in this example still appears reasonable for the stem considering the proportion of stem captured. A circle was used in this study to find the stem center; however, future work may explore the use of a noise-tolerant convex hull-based approach which could use the centroid of these shapes as the stem center from which to measure CCI. Both circle fitting and the suggested convex hull (such as in [
32]) -based completeness metrics would fail to accurately represent a stem if the stem is ‘C’ shaped (such as a partially burnt and hollow stem). ‘C’-shaped stems are indistinguishable from incompletely mapped stems unless the wall thickness of the ‘C’ section is thicker than the noise/error in the remote sensing method used as well as the inside of the ‘C’ being well mapped.
A limitation of the methodology used in this study is that manual trimming of the point cloud was required, introducing some subjectivity to the dataset. While the utmost care was taken to not influence the results, there was some subjectivity in the manual point cloud slicing process, which must be acknowledged. It is possible that additional small stems, which were marked as missing measurements, were successfully reconstructed and were removed/missed in this manual process. This slight subjectivity of manual slicing is expected to have had a nearly negligible effect on large and well-reconstructed stems; however, it would have likely had a negative impact on the small and highly vegetated stems, particularly where some discretion was required when identifying the blue tape in low light and low contrast situations. Wherever there was doubt about tape detection or where there was no clear stem circle/arc from a taped section, the points were considered to be missing measurements and were removed. An additional limitation of this study is that the presence of the blue tape marks throughout the site contributed to some tie points in the image alignment process. This effect appears to have been minimal, as the natural environment provided plenty of unique features used in the alignment process (seen in
Figure A3). However, it is necessary to acknowledge that this may have improved the diameter accuracy through better reconstruction in taped regions.
Future research in this area would greatly benefit from improved collision avoidance systems and/or reliable GNSS denied autonomous flight. For systems like the DJI Phantom 4, it would have been particularly useful if a smaller threshold distance/collision box could be specified for taking avoidance action to enable the use of collision avoidance in sites such as those in this study. The large collision box required that collision avoidance be completely deactivated in this study so that the UAS could fly between narrow (yet still safely passable) gaps. Systems such as the Skydio 2 [
33] and companies such as Katam Technologies [
34] look particularly interesting for addressing some of these autonomy challenges.
Lastly, an operational challenge of under-canopy UAS mapping with an aircraft such as the Phantom 4 is that of path planning for complete data capture. The Phantom only has a single camera (not including the three stereo cameras used for collision avoidance), presenting a challenging optimization problem for a human pilot with no feedback regarding which areas have been sufficiently imaged for successful and accurate image alignment and reconstruction. The optimal path planning problem is particularly difficult to explore through manual flight, as it is challenging to define and follow a structured flight path in a highly unstructured environment. Such an optimization task would be better suited for a machine to compute during flight than a human. Initial attempts were made by the authors prior to this study to explore different flight paths through manual flight; however, it was clear that fully autonomous navigation with repeatable path planning/following is required to explore this problem appropriately as it is difficult for a human to perform repeatable flight patterns/strategies in unstructured forests.
Despite the challenges and limitations of using a consumer-grade, off-the-shelf UAS for under-canopy AP, this approach was still highly effective in both time cost and quality of results. If this was combined with automated point-cloud post-processing, this method may already be faster than measuring a plot with traditional field techniques. In addition to potential time savings, the under-canopy UAS-based approach provides a much richer dataset than field measurements, with the possibility of enabling us to move away from allometric equations and DBH measurements and instead measure volume at the individual stem and branch level, transforming how we measure forests in the future. It is foreseeable that such rich datasets could eventually be incorporated into fully autonomous forest operations from planting and weeding through to harvest [
35].





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}