1. Introduction
Over the last decade, Arctic-average temperatures have increased to become twice as high as the global average and the Northern environment has been in a rapid and unstable transition as a result of global climate change [
1]. This has brought a rapid local environmental change that is increasingly evident in the observations of many geophysical and biological properties. The interactions between atmosphere, ocean, cryosphere, and biosphere are responsible for the phenomenon known as Arctic amplification. The stronger augment of global warming in this region can be attributed to various feedback mechanisms present in the Arctic environment. Some processes are locally confined to the diminishing sea ice cover of the Arctic ocean [
2]. Other amplifying processes are related to the increasing open water surface of the Arctic ocean and to land-ice melt. The latter phenomenon was initially underestimated by the 4th Assessment (2007) of the Intergovernmental Panel on Climate Change (IPCC) [
3]), and was taken into consideration in the IPCC 5th Assessment (2013) [
4]. Nowadays most scientists foresee that the global land-ice melt is continuously increasing with unpredictable feedback effects on the ecosystem.The presence of Arctic amplification, as well as its geographical position on the border between the Atlantic and Arctic waters [
5], makes the Svalbard Islands and, in particular, its glaciers a key site for understanding the effects of ongoing climate change on glaciers, oceans, and ecosystems [
6]. The observations from the West coast of the Svalbard archipelago show an annual temperature increase of 1.4 K with the consequent rapid retreating of tidewater glaciers and it is expected that they will terminate on land at some time in the future [
7]. This seems to be inevitable. Since the large-scale circulation within the inner fjord is influenced by the melting of tidewater glacier fronts, a transition to a fjord with only land-terminating glaciers will affect the fjord circulation with sudden implications for the entire ecosystem of Kongsfjorden. As much as physical processes occurring in the Svalbard fjords have an influence on the local environment, a large-scale fall-out on the global environment can be expected.
The IPCC projections were underestimated because sea ice retreat itself was underestimated as projections were based on climate models that failed to include the effects of some of the small-scale but critical processes involved. Understanding the processes should involve all the local effects with a completion of acquired data. As an example, Arctic tidewater glaciers are retreating and this will locally affect the fjord circulation and ecosystems when glacier fronts become land terminating. In addition, the extended mass loss make glaciers the most important cryospheric contributors to global eustatic sea-level rise.
Recent reports in Svalbard observations [
8] focus on knowledge gaps and recommendations on the future. In particular it is becoming evident that local observations indicate that climate change and shifting disturbance regimes are causing a series of changes that have a feedback action on the Arctic environment.
The overview knowledge of the scenarios together with sea-ice, permafrost, and glacial topography of retreating glaciers is important in modelling future scenarios of fjord circulation and glacier dynamics. The remote sensing models with their high-resolution digital data allow an overview of the situation [
6,
9] but these methods are limited by the need of a ground-truth and do not give the possibility of analysing local compositions. For this reason, local land observations have to be performed. However, in particular for ocean observation, the widespread and quality of observations cannot be carried out with traditional methods. Particularly interesting is the case of monitoring the calving front of tidewater glaciers. In these hazardous areas the most direct observations were traditionally performed operating from surface vessels that, for safety reasons, had to maintain a safe recommended distance (typically farther than 200 m) [
10] from the glacier. For this reason, a complete data acquisition in the whole area could not be performed.
In recent years, a number of research groups are trying to fill the gap of data in the Arctic environment by means of robotic applications. With the primary goal of reducing risk to field workers in 2010 an Unmanned Surface Vehicle (USV) based on a dinghy hull, [
11] was designed as a remote-controlled glacier-surveying robot, capable of taking accurate above- and below-water measurements of calving glacier fronts, using swath bathymetry and laser scanning hardware. In 2012, the boat Minty2 [
12], expressly designed for polar environment, was taken to Greenland to attempt a survey of the Lille Glacier near Uummannaq where problems with the radio modem, GPS, compass, and weather conditions prevented the mission to be accomplished showing the difficulties that can be encountered in this environment. The large size of the two USVs also proved to the research group the need for using reduced logistics.
In 2014, the use of a gasoline-based vehicle, the JETYAK [
13], highlighted the usability of Autonomous Surface Vehicles (ASVs) near calving glaciers. The survey had a multibeam sonar of the calving front, which allowed the shape profiles of the Sarqardleq Glacier in Greenland to be obtained with a surface vehicle, operating in an area forbidden to Autonomous Underwater Vehicles (AUVs) due to the shallow depths.
In 2016 overcoming navigation difficulties in the acoustically noisy, iceberg-filled fjord, the same research group [
14] used a REMUS-100 AUV that covered a large portion of the near-ice waters along the terminus of the Sarqardleq Fjord. This provided several new observational insights to the characteristics and distribution of near-ice area.
Recently new solutions are being developed to increase the number of data collected. As an example, an Unmanned Aerial Vehicle- (UAV) based solution with the IceDrone [
15] demonstrated the potential for unmanned aerial drone systems to aid in ice sampling operations. Another example is ARCAB [
16], an open-source ASV expressly targeted for harsh polar environments that responds with lightness, cheapness, and reliability. ARCAB operated autonomously in winter-time conditions in Greenland and measured bathymetry and ocean currents in shallow and rocky areas that would make the use of manned vessels too risky.
As discussed in [
17], robotics can provide effective solutions to collect high quality data in hazardous environment, mitigating risks. Indeed, the use of a Teledyne Gavia Offshore Surveyor ‘Freya’ operated from the Norwegian Polar Institute vessel MS Teisten allowed in 2016 and 2017, a high resolution mapping of bathymetry and Conductivity-Temperature-Depth (CTD) profiles in front of Fjortende Julibreen, Conwaybreen, Kongsbreen, and Kronebreen glaciers in Svalbard.
In the same years, from 2015 to 2018, field experimental activity carried out by Italian National Research Council (CNR) researchers in the Arctic regions supported the evaluation and demonstration of capabilities and effectiveness of Unmanned Marine Vehicles (UMVs), aerial, surface, and underwater, in monitoring and sampling the sea-ice-atmosphere interface in front of tidewater glaciers. In particular, in 2015, 2017, and 2018 (depicted in
Figure 1) respectively, three campaigns were carried out in Ny-Ålesund, Svalbard Islands, to demonstrate: (i) The capability of an Unmanned Semi-Submersible Vehicle (USSV) to approach a glacier front, collecting water samples just below it; (ii) the capability of a USSV to work in cooperation with UAVs for sea surface and air column characterisation in the proximity of fronts of glaciers; and (iii) the capability of a USSV, equipped with suitable tools and instruments, to perform a repetitive sampling of the water surface as well as studying the parameters of the water and air column close to the front of glaciers.
This paper describes, from a robotic point of view, the field activity performed by CNR in the above-mentioned campaigns. The activities were supported by the logistic aids provided by Kings Bay AS and Dirigibile Italia station in Ny-Ålesund. Data sampling and sensing were carried out in the proximity of the Blomstrandbreen, Kronebreen, Kongsbreen, and Conwaybreen glaciers, in the Kongsfjorden, using the prototype Shark USSV (2015) and the modular reconfigurable PROTEUS ROV/AUV/USSV (2017, 2018) together with the OTTO UAV (2017). In particular, this work discusses the advantages and the issues given by single- and multiple- vehicle operations (surface and aerial). Moreover it also points out how the lessons learnt, as far as the logistic and the operations at sea are concerned, motivated the development of light and small size robotic vehicles to be able to carry on multiple heterogeneous data acquisition and sampling devices, often ad-hoc developed. The final result was the production of a robotic tool capable of performing an efficient and reliable multi-sensor analysis in the whole column underwater-sea surface-air in the direct contact with tidewater glaciers front.
The paper is organised as follows.
Section 2 introduces scientific motivations of marine robotics applications in Arctic regions and presents logistic conditions and support in the Dirigibile Italia station in Ny-Ålesund.
Section 3 describes the prototype and commercial unmanned vehicles used in the different missions. A detailed report of the campaigns, carried out in the framework of the ARCA (ARctic: present Climatic change and pAst extreme events), UVASS (Unmanned Vehicles for Autonomous Sensing and Sampling), and EXCELLABUST (Excelling Labust in Marine Robotics) projects, is given in
Section 4, while a general overview of results, technological and operational approaches, and lessons learnt in the three campaigns is discussed in
Section 6.
4. Campaigns and Results
The CNR marine robotics research group based in Genova, Italy, has more than 25 years of experience in the exploitation of UMVs in polar areas. After a pioneer exploration of Ross Sea benthos performed with Roby ROV in Antarctica in 1993 [
34], many campaigns were carried out with Romeo ROV [
35,
36], and Charlie, the first USV used in Antarctica [
37]. Among these activities, in 2002 in the framework of the projects e-Robot and e-Robot2 the Romeo ROV was remotely operated, through Internet and a satellite communication link, from locations in Europe when working in the Italian stations of both Terra Nova Bay, Antarctica [
38], and Dirigibile Italia, Ny-Ålesund, Svalbard [
39]. All these activities saw the strict collaboration between the robotics researchers and the polar scientists in order to enhance the capabilities of marine robots to perform environmental monitoring and sampling operations. On the basis of the above-mentioned campaigns, CNR research focused on designing, developing, and validating the robotic technology, and corresponding operational procedures to monitor the ice-water-atmosphere interface in proximity of tidewater glaciers.
Three scientific campaigns, presented in details in the following sub-sections, allowed one to demonstrate the feasibility of robotics technology to accomplish the task of monitoring and sampling water and atmosphere in the proximity of the fronts of glaciers, and to evaluate the performances of cooperative multi-robot systems vs. compact single robot solutions.
4.1. ARCA Project
The project, Arctic: Present Climatic change and past extreme events—ARCA, aimed at developing a conceptual model on the mechanism(s) behind the release of large volumes of cold and fresh water from the melting of ice caps and supported the development and testing of new technologies targeted to improve process investigation at the interfaces of the different system components, in particular hydrosphere-atmosphere and hydrosphere-cryosphere. As described above, since it is characterised by Atlantic water influx and the melting of tidal glaciers, Kongsfjorden was considered a pilot site for the evaluation of new technologies for the study of the interface between the melting glaciers front and the sea inside the Arctic fjords. Within this framework, the ARCA project supported the development of a first prototype system to perform the discrete sampling of waters in the proximity of tidewater glacier fronts. The purpose was to obtain in situ data to study the heterotrophic bacterial distribution and functional metabolism near the glacier to better understand the hydrology cycle and its consequences on the climate in the Boreal hemisphere. To this aim the prototype Shark USSV was equipped with a towed trimaran mounting an AWS (see
Section 3.1). The resulting operational configuration is shown in
Figure 12.
4.1.1. Missions
The 2015 CNR marine robotics campaign in Ny-Ålesund was a “pilot test” for evaluating the usability of robotic tools in sampling near the front of tidewater glaciers in the Arctic environment, mainly devoted to define operational procedures and demonstrate the technical feasibility of the proposed approach. A two-day mission was performed as reported in
Table 1.
On 23 June, 2015, as shown by the vehicle path graphed in
Figure 13, Shark USSV reached the front of the Kronebreen glacier where, for the first time, water samples were collected. A microbiological study, carried out on the acquired samples, showed the presence of a high microbial glycolytic activity in the water collected near the Kronebreen glacier [
29].
4.1.2. Achievements and Problems
The objective was accomplished performing a couple of surveys as shown in
Table 1, where Shark USSV, deployed by MS Teisten, was equipped with an Idronaut CTD Multiparameter probe. The capability of an USSV of collecting water samples and acquiring physical parameters just below the front of a tidewater glacier was demonstrated by the Shark+AWS system (see
Figure 7) approaching the Kronebreen glacier front in June 2015.
The Shark+AWS system demonstrated unquestionable advantages: (i) Real-time or near real-time acquisition of physical, chemical, and biological data series; (ii) capability of avoiding the presence of manifold (small and medium) drifting icebergs obstructing the passage to the glacier; (iii) protecting the operators from falling off ice blocks that can be directly or indirectly (due to the produced waves) dangerous; and (iv) the use of small and portable tools is suitable in remote areas.
No particular technical issues were encountered during the mission. The Shark USSV was able, in calm waters and favourable weather conditions, to perform the requested sampling and to move in the middle of practically still bergy bits without any problem. The absence of currents (and wind), as explained later in this paper, was a key factor for the success of the missions since no bergy bits were dragged by currents.
A first useful indication for future missions was that a robotic vehicle in USSV configuration was very suitable for operating in waters with the presence of floating pieces of ice. This was because its semi-submersed hull allowed for good stability and to easily push aside the blocks of ice from below the surface, ergo guaranteeing a good navigation, particularly in case of collision. A second suggestion was that to have a redundant propulsion system (i.e., having on board PROTEUS more motors than those strictly necessary to perform the required movements) was a very useful feature for being able to safely return at the support boat also in presence of a motor fault.
4.2. UVASS Project
In 2017, from 13 June to 26 June, a second scientific campaign [
40] was carried out in cooperation with researchers from other institutes of the National Research Council (IAMC, ISMAR, ISAC, IBIMET) and Tuscia University, to evaluate the capability of robotic tools to monitor sea-ice-atmosphere interface close to the marine front of tidewater glaciers. The scientific goal was that of improving the understanding of chemical, physical, biological, and meteorological phenomena occurring in this specific area.
From a robotics perspective, the project Unmanned Vehicles for Autonomous Sensing and Sampling—UVASS tested and evaluated an operational solution involving a fleet of heterogeneous UxVs, namely PROTEUS USSV towing a trimaran transporting AWS, OTTO, and Splash UAVs. A custom plywood platform (2.5 × 2.5 m) was mounted on the stern of the MS Teisten for UAVs take off and landing. The resulting operational configuration is shown in
Figure 14.
The goal of the campaign was the sea surface and air column characterisation in the proximity of the fronts of glaciers by using an USSV in cooperation with Unmanned Aerial Vehicles.
The USSV PROTEUS was equipped with the following sensing/sampling package: Underwater video-camera; led lights; GoPro camera; Tritech Micron echosounder for acquiring bathymetric data; Idronaut Ocean Seven 305 CTD multiprobe sensor for acquiring water physical parameters; small prototype sensor for measuring pressure, temperature, and fluorescence of chlorophyll named ArLoC, developed by Tuscia University [
41,
42]; and Turner Cyclops-7 turbidity sensor. All these sensors were synchronised and geolocalised thanks to real-time integration with the telemetry of PROTEUS. Wi-Fi radio connection with the remote station aboard MS Teisten allowed the scientific end-user to access data in real time and modify the sampling area according to sampling requirements and performance. Due to the need for acquiring a huge and spread amount of data a small trimaran vessel was towed by PROTEUS during its surveys
Figure 15. This trailer was used to host particularly heavy or bulky sensors i.e., an automatic water multi-sampler provided by IAMC-CNR for the study of microbial biomass and bacteria respiratory activity, a plankton multi-sampler, and a Seabird SBE19plus v2 multiprobe sensor, provided by ISMAR-CNR, for performing water data sensing.
PROTEUS USSV, as well as OTTO and Splash UAVs, were remotely operated by personnel on-board MS Teisten, which remained at a safe distance of about 500 m, from the glacier front.
During this campaign the only safety measure adopted for the marine vehicle was the use of a Dyneema rope to recover the vehicle in case of a sudden fall of ice on it.
4.2.1. Missions
Operations were performed in the stretch of sea facing two distinct glaciers in the Kongsfjorden, i.e., Kronebreen and Blomstrandbreen. The missions carried out in the 2017 campaign are reported in
Table 2.
The changes occurring near the front of the glacier comprise of the ice melting and transfer of water from land to the fjord resulting in variations in temperature, salinity, and turbidity of the nearby water masses that can affect the marine ecosystem and possibly modify the biodiversity of the area. To capture parameter variations with respect to the distance, the robot moved along paths almost perpendicular to the glacier fronts, as shown in
Figure 16, where the results of the vehicle motion in two different mission sets is reported.
1. Kronebreen Glacier Sampling
The first set of sampling and monitoring here reported was acquired in front of the Kronebreen glacier, the same place where the pilot test was performed with Shark USSV in 2015. The glacier is located at the head of the Kongsfjorden. The sampling was carried out using only PROTEUS USSV and its towed trimaran.
As shown later, the sampling in front of the Kronebreen was limited by the presence of an enormous number of bergy bits and growlers, which modified the strategy of sampling.
2. Blomstrandbreen Glacier Sampling
The second set of sampling and monitoring was acquired in front of the Blomstrandbreen glacier, located in the north-east area of the Kongsfjorden (see
Figure 16). This is an area affected not only by the introduction of fresh water from the melting glacier but also by the Atlantic currents that come from the north [
5]. This area is therefore particularly interesting from the climatic changes point of view and suitable for the sampling of environmental parameters. In particular, recently, the circulation in the fjord has substantially been modified by the opening of the channel between land, glacier, and the island named Blomstrandhalvøya.
For these reasons this glacier was chosen for the combined operation with the autonomous marine vehicle PROTEUS (for the characterisation of the water) and the aerial drone OTTO (for the characterisation of the air column). The Splash drone was also used for collecting images and videos for documentary purposes. In
Figure 17, the three robots operating in front of the glacier are shown.
PROTEUS was equipped with the full set of sensors and samplers listed above. During the campaign, sets of eight 500 mL bottles per mission were collected and numerous parameters were simultaneously recorded in water: Conductivity, temperature, depth, pH, Eh, oxygen with the CTD, depth, temperature, chlorophyll a1, chlorophyll a2 using a multi-probe sensor, fluorescence, and turbidity. The trends of temperature, salinity, conductivity, and turbidity are shown in
Figure 18 as a function of distance from the front of the glacier.
At the same time, the OTTO UAV performed several missions, some equipped with the air quality sensors AirQino and others with the FLIR thermocamera. In the first configuration, OTTO used the various sensors mounted on-board to acquire data allowing one to reconstruct the characteristics of the air column overlying the area inspected by PROTEUS and collected pictures and videos of the area. In the second configuration, OTTO not only collected pictures and videos of the area but also obtained a thermal pattern of the area in order to study possible correlations between data coming from air measurements and data coming from the CTD mounted on-board PROTEUS.
4.2.2. Achievements and Problems
The first important issue related to the 2017 campaign was the shipment of the material. Actually, when the robotic team arrived in Ny-Ålesund, it was obliged to re-build a part of the electronic core of the vehicle. The damages to the vehicle were caused by the vibrations, jumps, and bumps that the transporting box was subject to. The shipment took more than two month to reach Ny-Ålesund and this had undoubtedly affected the good state of the vehicle. This was an important point to take into consideration for future missions and in 2018 the electronic core was shipped in a separate and more dampened box. Even if this aspect limited the number of surveys performed and did not affect the results obtained in the campaign.
Figure 18,
Figure 19 and
Figure 20 show some examples of data collected near Kronebreen and Blomstrandbreen glaciers and some results of the analysis were presented in a series of works: [
43,
44,
45,
46,
47,
48,
49].
As shown in
Figure 18 (left Blomstrandbreen, right Kronebreen), the measurements carried out in high-risk areas where navigation is forbidden, confirmed the expected trend: Water temperature and salinity increased with the distance from the front of the glacier, while turbidity decreased. This is due to the fact that near the front of the glacier there are inputs of fresh water coming from melting and calving events.
The acquired samples were analysed for nutrients, organic matter, and its utilisation by microbial activity, using enzymatic activity techniques. Microbiologic analysis were used to depict differences in the microbial catabolic potential. Variations in organic matter distribution and in the functional diversity of microbial assemblages were observed. Freshwater runoff from ice melting was found to increase the amount of terrestrial organic matter to the fjord and microbial processes allowed organic matter decomposition. On the other hand, viral and prokaryotic abundances were significantly correlated with each other and their spatial distributions resulted to be not affected by the presence of the glacier. A low viruses abundance was found compared to the other marine ecosystems and it might be explained by the adsorption on particles. High nutrient concentrations were detected but they appeared to be not linked to microbial patterns [
44].
Moreover two ‘state-of-the-art’ probes, Idronaut 305 plus and SBE-16, together with the ARLoc low-cost probe were installed onboard PROTEUS and allowed the acquisition of surface water temperature, conductivity, dissolved oxygen, chlorophyll a, fluorescence, and turbidity. These data allowed one to make a comparison between traditional and innovative probes. The results highlight a high biomass concentration in proximity of the glacier front (featuring colder water masses), thus confirming the influence of ice melting on phytoplankton bloom. At the same time, this test underlined the capacity of the PROTEUS vehicle to detect microscale ecological processes in extreme environments, where natural hazards (e.g., icebergs, falling masses of ice, etc.) hinder normal sampling activities. The study of these phenomena is of fundamental importance in increasing our knowledge of global warming process, which directly affect the ice melting. In turn, this leads to an increase in continental inputs to surface waters, resulting in phytoplankton growth.
As far as the OTTO UAV is considered, issues were encountered in the calibration of the compass: Various attempts were done but it was impossible to calibrate the compass in an acceptable way. This problem was due to proximity to the magnetic North Pole which influences the behaviour of the compass. Due to this problem and to meet the safety requirements at the same time, the two pilots of the drone flow in a complete manual and visual way.
Examples of images acquired by the thermal camera mounted on-board OTTO UAV are shown in
Figure 19: On the left there is a grey scale thermal image (ice is white while water is grey) and on the right there is the same image but in false colour scale, showing the temperature range obtained from the raw data of the FLIR A35 thermal camera. From the thermal images it is possible to retrieve an indication of the trajectories followed by the floating ice and consequently of the direction of the currents present in the surface water layer.
An analysis of the data related to the air column gave information on atmospheric chemical composition in the Arctic area. The AirQino, equipped with low-cost and low-weight but high-resolution sensors, provided measurements of meteorological parameters of relative humidity, temperature, and pollutant/species concentrations: CO, CO
2, O
3, and NO
2. The flown profile highlighted an expected decrease in CO
2 with altitude reaching background values consistent with the recent increase of concentration of the above mentioned gas in the Arctic due to climate changes [
48].
Temperature and humidity sensors were calibrated against the Climate Change Tower in Ny-Ålesund, while the chemistry sensors were calibrated against reference high-cost instruments (HORIBA gas analysers). The data collected during the campaign complemented surface data from the camera giving some information on atmospheric chemical composition. An example of CO
2 distribution as a function of the altitude of the OTTO drone is shown in
Figure 20.
During the UVASS campaign, the use of the towed multisampler showed its limits. Whereas the campaign was successfully completed and the device itself always worked in the proper manner, the towing of the trimaran resulted to be an obstacle for the sampling. When the ice calving happens, the area in front of the tidewater glacier is often covered by floating ice debris (icebergs and growlers) that obstruct the passage for the vehicle. In these conditions, the towing rope is an obstacle to movement and the trimaran towed by PROTEUS can get trapped in the ice as shown in
Figure 21. Even greater problems were generated by a safety connection between the vehicle and the mother ship made via a thin Dyneema cable (6 mm diameter). Since the cable was completely trapped between the floating ice blocks, preventing the vehicle from manoeuvring, it was necessary to cut it. The Dyneema cable was considered a safety connection to recover the vehicle in case of a sudden fall of ice on it but it could become a problem for the mission accomplishment in case of huge drifting of ice.
4.3. EXCELLABUST Project
From the end of May and the beginning of June 2018, a third robotic-scientific campaign was carried out in the framework of the H2020 project EXCELLABUST—Excelling LABUST in marine robotics. The campaign hosted a field training to show to a group of 12 researchers in marine robotics from universities of Zagreb, Limerick, and Girona, to show the peculiarities of operations in a polar environment, demonstrating the feasibility of the USSV-based characterisation of the water and air column in the proximity of the fronts of tidewater glaciers.
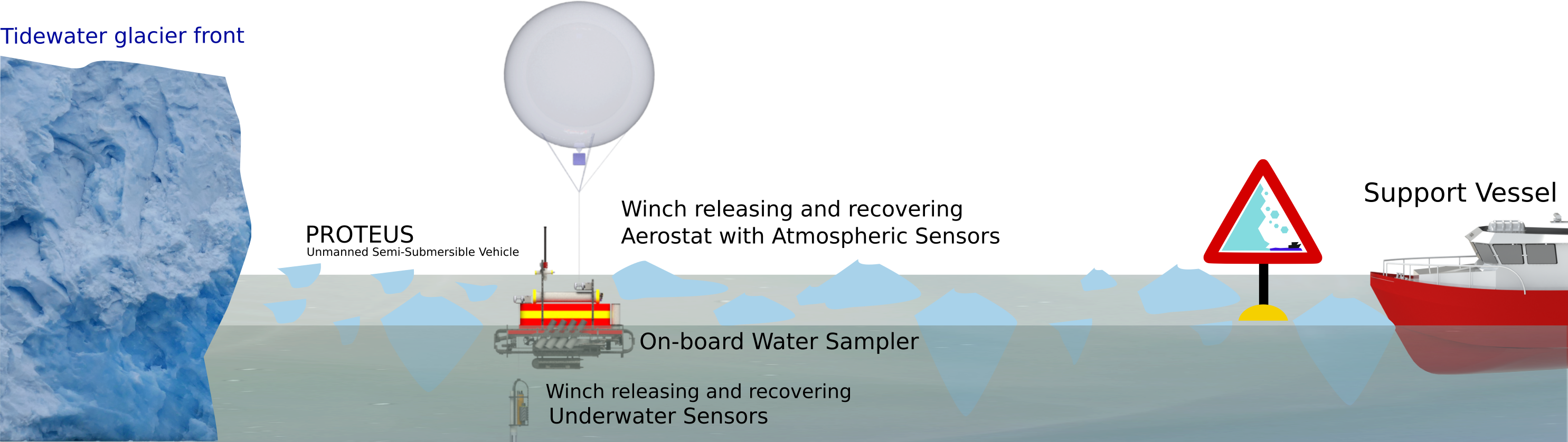
The simultaneous operations of USSV and UAVs, demonstrated in the UVASS campaign in 2017, allowed the collection of water and air parameters at the price of a rather heavy logistics on board the support vessel. Working with multiple water and air drones from MS Teisten was difficult for their remote control teams, who were forced to operate in an extremely small space. This experience, together with the availability of low-size commercial components, pushed research towards the design and development of new miniaturised data acquisition and sampling tools to be integrated aboard a single portable vehicle. The aim of the mission was to accomplish the scientific goal of studying sea-ice-atmosphere interface, profiling the parameters along the water and air column. The operational solution was developing an USSV equipped with a miniaturised water multi-sampler and two winches for the deployment and recovery of underwater and atmosphere multi-parametric gauges (see
Figure 22).
The installation on-board PROTEUS USSV of a new and innovative Mini Automatic Water Sampler (MAWS) for the collection of multiple water samples [
50] eliminated the unwieldy trimaran and the previous multisampler. The MAWS was built with standard chemical laboratory bottles (500 mL) on which an automated cap based on magnetic forces generated by permanent magnets and solenoids was applied. The use of eight bottles allowed sampling at different distances from the glacier. These can be replaced by another eight after each sampling. In addition, the MAWS could be controlled remotely by means of a RS-232 serial link.
Moreover, for carrying out data acquisition in the water and air columns, two release systems based on automatic winches were installed on PROTEUS (see
Figure 23). Each winch was made up of a customised fishing reel with a thread guide that was adapted so that a brushless electric motor, placed in a watertight container, could move the winch by means of a reduction box with a worm screw that allows the intrinsic brake of the winch and prevents it from being freely unrolled. This solution reduced the power consumption of the motor. The winches could be remotely controlled by PROTEUS via an Ethernet connection.
The fore winch was devoted to deploy and recovery a helium-filled aerostat, carrying Dronino (a Drone version of the AirQino), a multiparametric gauge for air quality monitoring (humidity, temperature, CO, CO
2, O
3, and NO
2). The use of the aerostat in place of an UAV not only simplified operations, but also increased the duration of data acquisition in the air column. The astern winch released and recovered a set of instruments for the chemical-physical characterisation of the water column. To characterise the water as a function of depth, the following set of sensors was used: A multi-parametric Idronaut 305 Plus CTD type probe (conductivity, temperature, depth, pH, redox, and oxygen), the ArLoC multi-sensor, a fluorimeter, and a turbidimeter. ArLoC (Arctic Low-Cost probe) is the tool for the acquisition of parameters relating to sea water designed by the University of Tuscia to be flexible, adaptable, low cost, and equipped with sensors for depth, temperature, and chlorophyll-a fluorescence. It was also used in the 2017 campaign where its reliability was evaluated by a comparison with “state-of-the-art” CTDs and by means of remote sensing data from Sentinel-2 [
42]. The management of the underwater winch was performed by using an altimeter to prevent the possibility of the grounding and deadlock of the sensors.
All data collected by the cluster of instruments released underwater were synchronised and saved by an ad-hoc developed system named MPDACS (Multi Purpose Data Acquisition Control System).
The vehicle and tools are shown in
Figure 24. Even if it resulted in becoming an impediment to the navigation in the 2017 campaign, PROTEUS was again linked to the boat by means of the Dyneema rope. This was done to also prevent the vehicle from remaining stuck to the bottom due to a grounding of the underwater sensors without the possibility of detecting the position and recovering the vehicle due to the impossibility of navigating in the forbidden area. In order to increase the safety of PROTEUS an Automatic Identification System (AIS Matsutec HP-33a) was installed on-board. The AIS gives the pilot the possibility to localise and rescue the vehicle in case of faults caused by external factors (e.g., in the case PROTEUS remained stuck between the blocks of ice and it was necessary to cut the Dyneema rope).
As far as the navigation strategy and communication security is concerned, a watchdog tool was used which intervened in the event of a loss of communication for a predefined period of time (usually 30 s), interrupting the generation of thrust by the motors until the communication link was restored. This was done because a loss of communication could cause the robot to apply indefinitely the last received command and this can be a very dangerous behaviour in the proximity of a glacier.
4.3.1. Missions
As reported in
Table 3, during the period 25 May to 1 June, 2018, PROTEUS USSV executed various missions in the proximity of the fronts of the Blomstrandbreen, Kongsbreen, Kronebreen, and Conwaybreen glacier (see
Figure 25).
Complete water and air column profiles, as well as surface water sampling, were performed nearby the Blomstrandbreen and Kongsbreen glaciers. An example of the vehicle and aerostat path, as well as water sampling points, while approaching Blomstrandbreen glacier is shown in
Figure 26.
Figure 27 and
Figure 28 report, as an example, the profile of depth and height recorded by the CTD and by the Dronino respectively in one of the campaigns made in front of the Conwaybreen glacier with the two winches working.
In
Figure 27, an example of measuring campaign with automatic CTD descent is shown. On the left the path with the water depth and on the right, the profile of depth with the temperature scale showing a lower temperature on the bottom and higher just below the surface due to the fact that seawater had a peak of density at, almost, −2 °C.
In
Figure 28, the altitude of the Dronino onboard the aerostat is shown together with the pressure scale.
In
Figure 29, the pictures of the mission vehicle with the aerostat are reported.
4.3.2. Achievements and Problems
As far as the robotics achievements are concerned, the PROTEUS vehicle was able to reach the front of the glacier releasing Dronino and the cluster of sensors together with the MPDACS. This was done by sampling and sensing up to the surface of the glacier with both the aerostat released in air and the water sensors lowered with the winch. Thanks to the smaller logistics it was possible to obtain a high repeatability of the sampling and of the sensing and this was indeed the main robotic result expected from the 2018 campaign whose development and design came from the experience achieved during the 2015 and 2017 campaigns.
Moreover, operative and logistics aspects were much easier to face by using only robotics and an aerostat instead of two robots (USSV and UAV) at the same time. Furthermore, transporting of the aerostat, which initially seemed problematic, proved to be quite safe using a hot-air balloon-like lashing.
As already happened in previous campaigns, many samples were collected for microbiological purposes. In the latter campaign, moreover, samples for the study of the portion of heavy metals, which needed to be subsequently frozen, and other samples for the analysis of Persistent Organic Pollutants (POPs) were also collected.
The practical indications obtained during the campaign are the following:
The enhancement of the vehicle by means of winches and the integrated water sampler proved to be reliable during operations at sea;
The team needed one person for managing the scientific part (choice of the sampling positions) and one for managing the vehicle. This was also because, in this area, the compass does not work well;
It was necessary to carefully take care of samplings when sampling water. Above all it is important that the samples are collected with sterile gloves and tightly closed, sealed, and frozen.
Careful attention should be paid to the preparation of the bottles and of the sampler.
As far as the technical problems encountered are concerned, some issues arose with heading management and calibration of the compass due to the proximity to the North Pole. For this reason the heading of the vehicle had to be manually managed by an operator on-board the support vessel by means of visual corrections by using the video streaming coming from a video camera located on board the vehicle. Even if the vehicle was provided with a double GPS system and compass, one placed on the vehicle and one on the USSV electronics respectively, the calibration of the compass and the dual GPS heading tests did not give good results. Actually, the low coverage of GPS signal and the disturbances in the magnetometer compass signal due to the vicinity to the magnetic North Pole affected the capability of the two systems. This is an aspect that will be used as future indication for the use of Fibre Optic Gyro that may be useful for the good management of heading.
Results originating from the data collected during the campaign have been published, among others, in [
51,
52]. Further scientific articles related to the above mentioned data are in preparation during the writing of this work.
5. Lessons Learnt and Hints for Future Missions
The three campaigns reported in this paper successfully accomplished the robotic target of increasingly improving the capacity of a robotic tool to sample and sense in a harsh environment represented by the stretch of sea in front of the tidewater glaciers.
The general success of missions was more than 90%. In just a small number of cases the missions were aborted for external reasons. The failures were mostly caused by the drifting of bergy bits and growlers caused by current and wind.
The main issue related to this drifting was the presence of the safety Dyneema rope that, whenever useful in case of calm waters, became a problem if ice drifting was present and the rope remains caught in the ice preventing the robot to move freely in water.
In future missions, thanks to the reliability demonstrated by the system and the use of the AIS, the idea is not to use the safety rope anymore. This should allow the missions to be accomplished with an even higher degree of success due to the fact that there will not be anymore impediments to the navigation caused by the presence of the rope.
The USSV configuration of the robots was chosen because in this case the hull was completely immersed and for this reason the vehicles could easily push away the bergy bits and growlers from below the sea surface. This solution allowed one to obtain a good navigation in these polar waters. The idea of using low draft high speed vehicles may become a problem in case the vessel overlaps the ice-sheets because this can prevent from a good navigation. The use of a monohull vehicle is also a good choice since the use of multiple hulls, like for example a catamaran, may also be a problem in case of growlers with the same breadth of the vessel as the vehicle can remain trapped during its path. In the case of catamarans, an additional rostrum at bow and stern could be useful to avoid the presence of floating ice.
A good solution, as far as the vehicle safety is concerned, is the use of a redundant propulsion system characterised by a number of propulsion unit. This expedient is useful to increase the probability to return home in case of problems caused by the bump with a piece of ice or by an electrical fault.
Another aspect was the important result in the accomplishment of repetitive sampling. First of all the use of a single vehicle that carries all sensors and samplers resulted to be a reliable solution. Moreover the vehicle battery sizing was chosen by considering a mission with a maximum continuous powering for 2 h. This allowed the possibility of having adequate endurance and therefore a vehicle equipped with manifold sensors.
As far as the sampling strategy was concerned, in the first missions the vehicle sampled in the desired places on its going route. On the contrary, during the last missions the vehicle was sent at high speed near the front of the glacier to sample there its first bottle. This solution was chosen with the aim of being able to make the most interesting samples, those closest to the glacier, in the first phase of the mission. In case of problems the vehicle would have been later recovered but having been already sampled.
Regarding the sampling strategy another interesting aspect was related to the choice of the sampler. The use of the pump-based sampler used in the first campaigns required more time than the cap-based (MAWS) water sampler. The sampling time implied that, if drifting ice begins, it is difficult to sample on the desired straight path. It must be noticed that as the ice begins to drift the whole mass of water moves as a pseudo-rigid body that drags the vehicle.
In the first missions, using the principle of caution, the vehicle was used at low thrust values but the missions resulted in being long and were affected by the above mentioned ice drifting. Thus it was stated that the vehicle must be able to move faster and go to sample quickly and quickly return.
Another improvement could be to endow the vehicle with an adequately pan and tilt camera or with multiple video cameras, for example four, each one looking on each side.
Increasing the degree of autonomy of the vehicle is certainly useful. The self/safe-return to home is something that will be implemented in future missions but for this purpose a good navigation package is required. The use of a Fibre Optic Gyro could be the solution to cope with the problems encountered in the use of dual GPS and compass for measuring heading in an area close to the magnetic North Pole.
The Wi-Fi radio connection with the remote station aboard MS Teisten allowed the scientific end-user to access data in real-time and to modify the sampling area according to sampling requirements and performance. In future automatic adaptive sampling methods could also be used to perform analysis and collect data in the most interesting locations. To this end, a vehicle allowing automatic station keeping could be very useful.
6. Conclusions
With the field experience gained in the campaigns carried out in 2015, 2017, and 2018, the CNR marine robotics group validated the capabilities of UMVs in monitoring and sampling the sea-ice-atmosphere interface in the very proximity of glacier fronts. In particular, field experience pointed out, as previously in other Antarctic operations, the need of adapting the available technology to operational and logistic constraints. According to these practical guidelines, the design and development of a modular reconfigurable portable compact vehicle able to carry on surface water samplers and tools for deploying and recovery multi-parametric gauges for monitoring water and air columns was preferred to the use of a fleet of cooperative surface and air unmanned vehicles. In fact, the single vehicle solution required a lighter logistics, including a reduced number of people for robot control and operations, that could be easily hosted on-board the available support vessel.
The use of Unmanned Semi-Submersible Vehicle was advantageous since it could move well between the icebergs, growlers, and bergy bits by pushing them from the submerged part without the risk of remaining stuck or trapped as it can happen to other kind of surface vehicles.
The final evolution of the PROTEUS USSV used by adopting the on board Mini Automatic Water Sampler and the two winches was the base for a repeatable series of sampling campaigns that could be performed in only two weeks in the stretch of water in front of any tidewater glacier of Arctic or Antarctica.
In any case, marine robotics demonstrated to be an effective and efficient solution to the problem of monitoring and sampling the sea-ice-atmosphere interface in the very proximity of glacier fronts. The next technological step will consist of using the adaptation of POP-ART PROTEUS reconfigurable vehicle to work as an AUV below the floating ice tongue in order to catch the fresh water flows coming from the inner glacier.
As far as the collected data is concerned, these constitute an inestimable source of information from a physical, chemical, and biological point of view. In order to make the best use of this source of information, the data will be managed according to the FAIR principles (Findable, Accessible, Interoperable and Reusable). This implies the standardisation of the information, which must be formatted according to the typically used standards (NetCDF/CF, GeoJSON, etc.), correlated by metadata, which allow the content to be interpreted and made available for inclusion in databases such as the Italian Arctic Data Centre (IADC) and SIOS Data Management System (SDMS).




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}