Uncertainty in Parameterizing Floodplain Forest Friction for Natural Flood Management, Using Remote Sensing



Abstract
:
1. Introduction
2. Literature Uncertainty in Remote Sensing-estimated Forest Structure
2.1. Trunk Diameters and Trunk Position
2.2. Branches and Leafless Structure
2.3. Foliage Structure
3. Method
3.1. Vegetation Roughness of a Forest Stand
3.2. Quantification of Forest Structure Uncertainty in Predicting Roughness
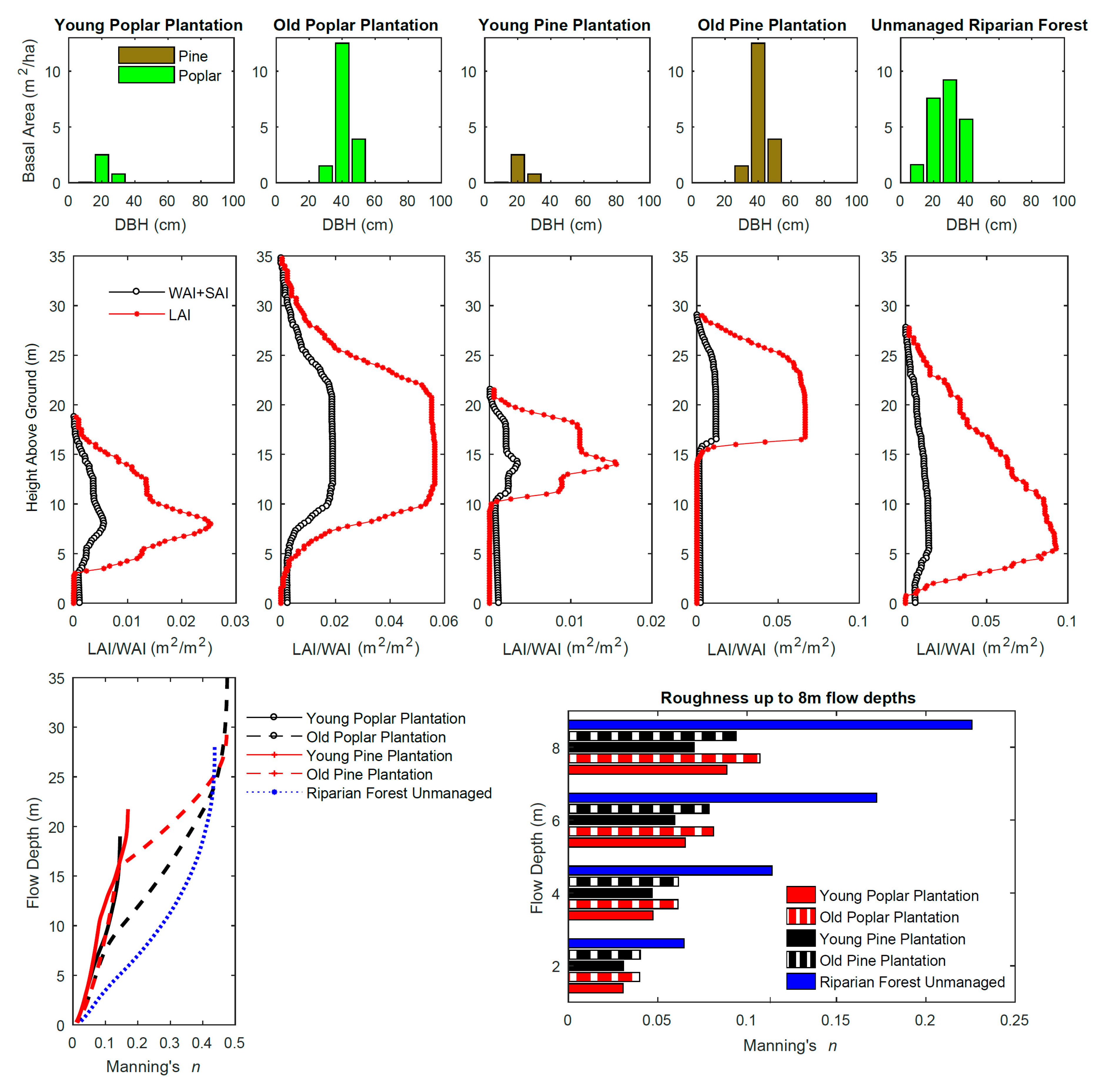
3.2.1. Test Forest Types and Control Forest Structure
3.2.2. Predicting Roughness and Incorporating Forest Structure Uncertainty
3.2.3. Demonstrating Flow Prediction and Incorporating Roughness Uncertainty
4. Results
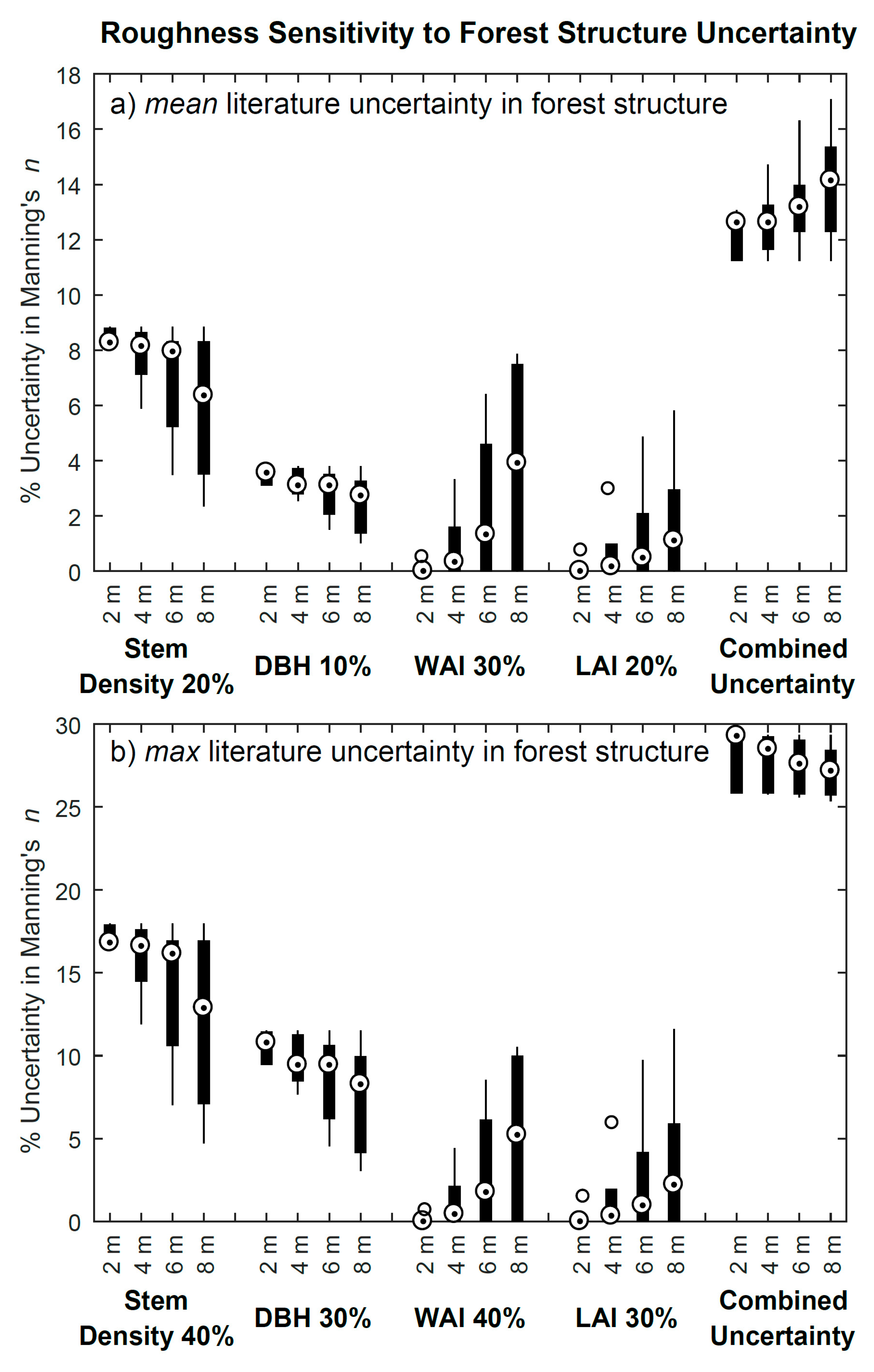
4.1. Uncertainty in Roughness Estimates Resulting from Errors in Forest Structure Measurements
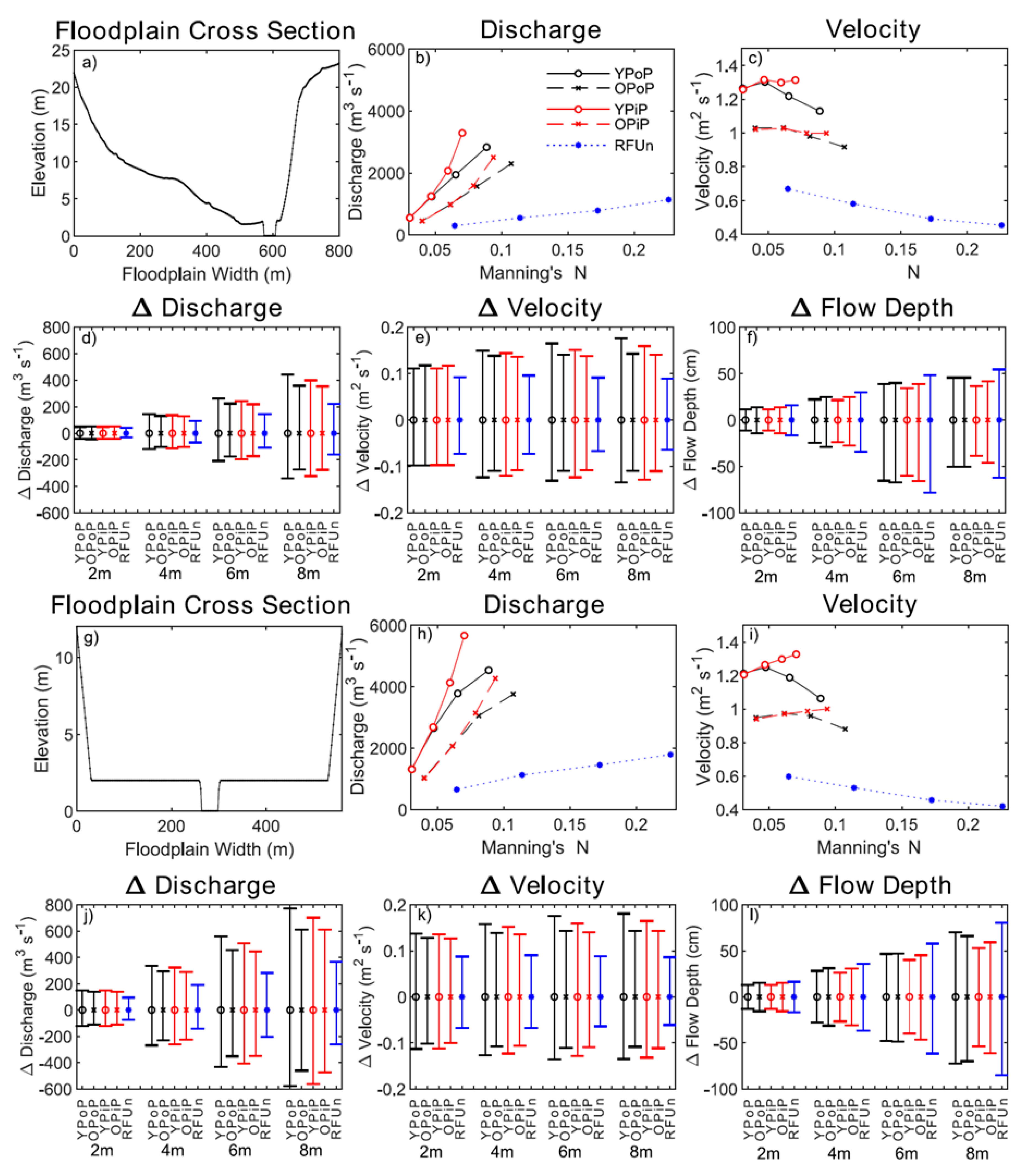
4.2. Implications of Roughness Uncertainty on Flow
5. Discussion
6. Conclusions and Recommendations
- (A)
- Uncertainty in deriving stem density results in the largest uncertainty in calculating Manning’s n. Remote sensing studies should focus on stem location and spacing uncertainty in dense stands of > 500 stems ha-1. DBH uncertainty is also important, and attention should be paid to deriving DBH from remote sensing with uncertainties below 10%.
- (B)
- Uncertainty in deriving WAI results in larger uncertainty in Manning’s n for deeper flows, yet remote sensing has not focused on determining woody area. Therefore, developing methods and using technology that can best determine vertical WAI is vital, from TLS to ALS campaigns.
- (C)
- Consequently, improving LAI (and WAI) estimations are much more important for forests with a low canopy, such as natural or semi-natural riparian forests. This becomes very important when considering the effect of remote sensing uncertainty in calculating LAI and WAI on flow depth for natural floodplain forests (Figure 4).
- (D)
- Roughness of extreme flow around tall trees needs to be calibrated. This would potentially create better flexibility parameters and drag coefficients, or inform us whether the current roughness equations are inadequate. Potential experiments could include monitoring floodwater during an actual large flood event within forest stands. Another solution may be to use laboratory flumes with microscale trees incorporating complex structure, and then extrapolate these results to the actual scale using appropriate scaling functions (see Reference [144] on multiscale numerical analyses).
- (E)
- Vertical roughness needs better parameterization in hydraulic models, beyond a single roughness value per horizontal grid-cell. One solution has been to simulate a flood event multiple times and iteratively change each grid-cell’s single-value roughness to match the flow depth (e.g., see Reference [145]). Remote sensing is capable of measuring vertical canopy structure and so have the ability to define vertical roughness (e.g., Reference [24]). The next step is to have this appropriate complexity represented in hydraulic models as stage-dependent roughness.
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Brakenridge, G.R. Global Active Archive of Large Flood Events. In Dartmouth Flood Observatory; University of Colorado: Boulder, CO, USA, 2018; Available online: http://floodobservatory.colorado.edu/Archives/index.html (accessed on 16 February 2018).
- Hirabayashi, Y.; Mahendran, R.; Koirala, S.; Konoshima, L.; Yamazaki, D.; Watanabe, S.; Kim, H.; Kanae, S. Global flood risk under climate change. Nat. Clim. Chang. 2013, 3, 816–821. [Google Scholar] [CrossRef]
- Wheater, H.; Evans, E. Land use, water management and future flood risk. Land Use Policy 2009, 26, S251–S264. [Google Scholar] [CrossRef]
- Rogger, M.; Agnoletti, M.; Alaoui, A.; Bathurst, J.C.; Bodner, G.; Borga, M.; Chaplot, V.; Gallart, F.; Glatzel, G.; Hall, J.; et al. Land-use change impacts on floods at the catchment scale–Challenges and opportunities for future research. Water Resour. Res. 2017, 53, 5209–5219. [Google Scholar] [CrossRef] [Green Version]
- GWSP Digital Water Atlas. Map 51: Sediment Trapping by Large Dams (V1.0). 2008. Available online: https://water-future.org/gwsp-archive-digitalwateratlas/ (accessed on 1 April 2020).
- Syvitski, J.P.; Vörösmarty, C.J.; Kettner, A.J.; Green, P. Impact of humans on the flux of terrestrial sediment to the global coastal ocean. Science 2005, 308, 376–380. [Google Scholar] [CrossRef]
- Brooker, M.P. The ecological effects of channelization. Geogr. J. 1985, 151, 63–69. [Google Scholar] [CrossRef]
- Oscoz, J.; Leunda, P.M.; Miranda, R.; García-Fresca, C.; Campos, F.; Escala, M.C. River channelization effects on fish population structure in the Larraun river (Northern Spain). Hydrobiologia 2005, 543, 191–198. [Google Scholar] [CrossRef]
- Castello, L.; McGrath, D.G.; Hess, L.L.; Coe, M.T.; Lefebvre, P.A.; Petry, P.; Macedo, M.N.; Reno, V.; Arantes, C.C. The vulnerability of Amazon freshwater ecosystems. Conserv. Lett. 2012, 6, 217–229. [Google Scholar] [CrossRef]
- Van den Honert, R.C.; McAneney, J. The 2011 Brisbane floods: Causes, impacts and implications. Water 2011, 3, 1149–1173. [Google Scholar] [CrossRef] [Green Version]
- Monbiot, G. Dredging rivers won’t stop floods. It will make them worse. The Guardian. 30 January 2014. Available online: https://www.theguardian.com/commentisfree/2014/jan/30/dredging-rivers-floods-somerset-levels-david-cameron-farmers (accessed on 1 April 2020).
- Wentworth, J. Natural Flood Management; The UK Parliamentary Office of Science and Technology notes, POST-PN-396; Parliamentary Office of Science and Technology: London, UK, 2011. [Google Scholar]
- Wharton, G.; Gilvear, D.J. River restoration in the UK: Meeting the dual needs of the European Union Water Framework Directive and flood defence? Int. J. River Basin Manag. 2007, 5, 143–154. [Google Scholar] [CrossRef]
- Nisbet, T.; Silgram, M.; Shah, N.; Morrow, K.; Broadmeadow, S. Woodland for water: Woodland measures for meeting Water Framework Directive objectives. In Forest Research Monograph: 4; Forestry Commission: Edinburgh, UK, 2011; p. 156. Available online: http://www.forestry.gov.uk/pdf/FRMG004_Woodland4Water.pdf/$FILE/FRMG004_Woodland4Water.pdf (accessed on 4 December 2017).
- Forestry Commission. Forests and Water. UK Forestry Standard Guidelines; Forestry Commission: Edinburgh, UK, 2011. [Google Scholar]
- CONFOR. Forestry and Flooding; Confederation of Forest Industries: Edinburgh, UK, 2016; Available online: http://www.confor.org.uk/media/246067/confor-37_forestryandfloodingreportfeb2016.pdf (accessed on 1 April 2020).
- Alila, Y.; Kuraś, P.K.; Schnorbus, M.; Hudson, R. Forests and floods: A new paradigm sheds light on age-old controversies. Water Resour. Res. 2009, 45, W08416. [Google Scholar] [CrossRef]
- FAO & CIFOR. Forests and Floods: Drowning in Fiction or Thriving on Facts? FAO Regional Office for Asia and the Pacific (RAP) Publication: Bangkok, Thailand, 2005. [Google Scholar]
- Calder, I.; Hofer, T.; Vermont, S.; Warren, P. Towards a new understanding of forests and water. Unasylva 2007, 58, 3–10. [Google Scholar]
- Thomas, H.; Nisbet, T.R. An assessment of the impact of floodplain woodland on flood flows. Water Environ. J. 2007, 21, 114–126. [Google Scholar] [CrossRef]
- Kouwen, N.; Unny, T.E. Flexible roughness in open channels. J. Hydraul. Division 1973, 99, 713–728. [Google Scholar]
- Järvelä, J. Determination of flow resistance caused by non-submerged woody vegetation. International J. River Basin Manag. 2004, 2, 61–70. [Google Scholar] [CrossRef]
- Antonarakis, A.S.; Richards, K.S.; Brasington, J.; Bithell, M. Leafless roughness of complex tree morphology using terrestrial lidar. Water Resour. Res. 2009, 45, W10401. [Google Scholar] [CrossRef] [Green Version]
- Antonarakis, A.S.; Richards, K.S.; Brasington, J.; Muller, E. Determining leaf area index and leafy tree roughness using terrestrial laser scanning. Water Resour. Res. 2010, 46, W06410. [Google Scholar] [CrossRef] [Green Version]
- Tanino, Y.; Nepf, H.M. Laboratory investigation of mean drag in a random array of rigid, emergent cylinders. J. Hydraul. Eng. 2008, 134, 34–41. [Google Scholar] [CrossRef]
- Schoneboom, T.; Aberle, J.; Dittrich, A. Spatial variability, mean drag forces, and drag coefficients in an array of rigid cylinders. In Experimental Methods in Hydraulic Research; Springer: Berlin/Heidelberg, Germany, 2011; pp. 255–265. [Google Scholar]
- Baptist, M.; Babovic, V.; Uthurburu, J.R.; Keijzer, M.; Uittenbogaard, R.; Mynett, A.; Verwey, A. On inducing equations for vegetation resistance. J. Hydraul. Res. 2007, 45, 435–450. [Google Scholar] [CrossRef]
- Van Oorschot, M.; Kleinhans, M.; Geerling, G.; Middelkoop, H. Distinct patterns of interaction between vegetation and morphodynamics. Earth Surf. Process. Landf. 2016, 41, 791–808. [Google Scholar] [CrossRef]
- Solari, L.; Van Oorschot, M.; Belletti, B.; Hendriks, D.; Rinaldi, M.; Vargas-Luna, A. Advances on modeling riparian vegetation—Hydromorphology interactions. River Res. Appl. 2016, 32, 164–178. [Google Scholar] [CrossRef]
- Boothroyd, R.J.; Hardy, R.J.; Warburton, J.; Marjoribanks, T.I. The importance of accurately representing submerged vegetation morphology in the numerical prediction of complex river flow. Earth Surf. Process. Landf. 2016, 41, 567–576. [Google Scholar] [CrossRef] [Green Version]
- Aberle, J.; Järvelä, J. Flow resistance of emergent rigid and flexible floodplain vegetation. J. Hydraul. Res. 2013, 51, 33–45. [Google Scholar] [CrossRef]
- Västilä, K.; Järvelä, J. Characterizing natural riparian vegetation for modeling of flow and suspended sediment transport. J. Soils Sediments 2017, 18, 3114–3130. [Google Scholar] [CrossRef] [Green Version]
- Peterken, G.F.; Hughes, F.M.R. Restoration of floodplain forests in Britain. For. Int. J. For. Res. 1995, 68, 187–202. [Google Scholar] [CrossRef]
- Hughes, F.M.; del Tánago, M.G.; Mountford, J.O. Restoring floodplain forests in Europe. In A Goal-Oriented Approach to Forest Landscape Restoration; Springer: Dordrecht, The Netherlands, 2012; pp. 393–422. [Google Scholar]
- Forestry Commission Scotland. Seed sources for planting native trees and shrubs in Scotland. 2006. Available online: www.forestresearch.gov.uk/documents/7060/FCFC151.pdf (accessed on 1 April 2020).
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Kankare, V.; Liang, X.; Vastaranta, M.; Yu, X.; Holopainen, M.; Hyyppä, J. Diameter distribution estimation with laser scanning based multisource single tree inventory. ISPRS J. Photogramm. Remote Sens. 2015, 108, 61–171. [Google Scholar] [CrossRef]
- Maas, H.G.; Bienert, A.; Scheller, S.; Keane, E. Automatic forest inventory parameter determination from terrestrial laser scanner data. Int. J. Remote Sens. 2008, 29, 1579–1593. [Google Scholar] [CrossRef]
- Antonarakis, A.S. Evaluating forest biometrics obtained from ground lidar in complex riparian forests. Remote Sens. Lett. 2011, 2, 61–70. [Google Scholar] [CrossRef]
- Brolly, G.; Király, G. Algorithms for stem mapping by means of terrestrial laser scanning. Acta Silv. Et Lignaria Hung. 2009, 5, 119–130. [Google Scholar]
- Olofsson, K.; Holmgren, J.; Olsson, H. Tree stem and height measurements using terrestrial laser scanning and the RANSAC algorithm. Remote Sens. 2014, 6, 4323–4344. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Hyyppä, J. Automatic stem mapping by merging several terrestrial laser scans at the feature and decision levels. Sensors 2013, 13, 1614–1634. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Calders, K.; Newnham, G.; Burt, A.; Murphy, S.; Raumonen, P.; Herold, M.; Culvenor, D.; Avitabile, V.; Disney, M.; Armston, J.; et al. Nondestructive estimates of above-ground biomass using terrestrial laser scanning. Methods Ecol. Evol. 2015, 6, 198–208. [Google Scholar] [CrossRef]
- Pouliot, D.A.; King, D.J.; Bell, F.W.; Pitt, D.G. Automated tree crown detection and delineation in high-resolution digital camera imagery of coniferous forest regeneration. Remote Sens. Environ. 2002, 82, 322–334. [Google Scholar] [CrossRef]
- Culvenor, D.S. TIDA: An algorithm for the delineation of tree crowns in high spatial resolution remotely sensed imagery. Comput. Geosci. 2002, 28, 33–44. [Google Scholar] [CrossRef]
- Ke, Y.; Quackenbush, L.J. A review of methods for automatic individual tree-crown detection and delineation from passive remote sensing. Int. J. Remote Sens. 2011, 32, 4725–4747. [Google Scholar] [CrossRef]
- Hyyppä, J.; Hyyppä, H.; Leckie, D.; Gougeon, F.; Yu, X.; Maltamo, M. Review of methods of small-footprint airborne laser scanning for extracting forest inventory data in boreal forests. Int. J. Remote Sens. 2008, 29, 1339–1366. [Google Scholar] [CrossRef]
- Huang, S.; Hager, S.A.; Halligan, K.Q.; Fairweather, I.S.; Swanson, A.K.; Crabtree, R.L. A comparison of individual tree and forest plot height derived from lidar and InSAR. Photogramm. Eng. Remote Sens. 2009, 75, 159–167. [Google Scholar] [CrossRef]
- Kathuria, A.; Turner, R.; Stone, C.; Duque-Lazo, J.; West, R. Development of an automated individual tree detection model using point cloud LiDAR data for accurate tree counts in a Pinus radiata plantation. Aust. For. 2016, 79, 126–136. [Google Scholar] [CrossRef]
- Antonarakis, A.S.; Richards, K.S.; Brasington, J.; Bithell, M.; Muller, E. Retrieval of vegetative fluid resistance terms for rigid stems using airborne lidar. J. Geophys. Res. Biogeosciences 2008, 113, G02S07. [Google Scholar] [CrossRef] [Green Version]
- Antonarakis, A.S.; Munger, J.W.; Moorcroft, P.R. Imaging spectroscopy-and lidar-derived estimates of canopy composition and structure to improve predictions of forest carbon fluxes and ecosystem dynamics. Geophys. Res. Lett. 2014, 41, 2535–2542. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.S. Evaluating tree detection and segmentation routines on very high resolution UAV LiDAR data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7619–7628. [Google Scholar] [CrossRef]
- Korpela, I. Individual tree measurements by means of digital aerial photogrammetry. Silva Fenn. Monogr. 2004, 3, 93. [Google Scholar]
- Ferraz, A.; Saatchi, S.; Mallet, C.; Meyer, V. Lidar detection of individual tree size in tropical forests. Remote Sens. Environ. 2016, 183, 318–333. [Google Scholar] [CrossRef]
- Persson, A.; Holmgren, J.; Soderman, U. Detecting and measuring individual trees using an airborne laser scanner. Photogramm. Eng. Remote Sens. 2002, 68, 925–932. [Google Scholar]
- Popescu, S.C. Estimating biomass of individual pine trees using airborne lidar. Biomass Bioenergy 2007, 31, 646–655. [Google Scholar] [CrossRef]
- Yu, X.; Hyyppä, J.; Vastaranta, M.; Holopainen, M.; Viitala, R. Predicting individual tree attributes from airborne laser point clouds based on the random forests technique. ISPRS J. Photogramm. Remote Sens. 2011, 66, 28–37. [Google Scholar] [CrossRef]
- Yao, W.; Krzystek, P.; Heurich, M. Tree species classification and estimation of stem volume and DBH based on single tree extraction by exploiting airborne full-waveform LiDAR data. Remote Sens. Environ. 2012, 123, 368–380. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Harding, D.; Cohen, W.B.; Parker, G.; Shugart, H.H. Surface lidar remote sensing of basal area and biomass in deciduous forests of eastern Maryland, USA. Remote Sens. Environ. 1999, 67, 83–98. [Google Scholar] [CrossRef]
- Means, J.E.; Acker, S.A.; Fitt, B.J.; Renslow, M.; Emerson, L.; Hendrix, C.J. Predicting forest stand characteristics with airborne scanning lidar. Photogramm. Eng. Remote Sens. 2000, 66, 1367–1372. [Google Scholar]
- Drake, J.B.; Dubayah, R.O.; Clark, D.B.; Knox, R.G.; Blair, J.B.; Hofton, M.A.; Chazdon, R.L.; Weishampel, J.F.; Prince, S. Estimation of tropical forest structural characteristics using large-footprint lidar. Remote Sens. Environ. 2002, 79, 305–319. [Google Scholar] [CrossRef]
- Asner, G.P.; Mascaro, J.; Muller-Landau, H.C.; Vieilledent, G.; Vaudry, R.; Rasamoelina, M.; Hall, J.S.; Van Breugel, M. A universal airborne LiDAR approach for tropical forest carbon mapping. Oecologia 2012, 168, 1147–1160. [Google Scholar] [CrossRef] [PubMed]
- Yu, X.; Hyyppä, J.; Karjalainen, M.; Nurminen, K.; Karila, K.; Vastaranta, M.; Kankare, V.; Kaartinen, H.; Holopainen, M.; Honkavaara, E.; et al. Comparison of laser and stereo optical, SAR and InSAR point clouds from air-and space-borne sources in the retrieval of forest inventory attributes. Remote Sens. 2015, 7, 15933–15954. [Google Scholar] [CrossRef] [Green Version]
- Antonarakis, A.S.; Guizar-Coutiño, A. Regional carbon predictions in a temperate forest using satellite lidar. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4954–4960. [Google Scholar] [CrossRef] [Green Version]
- Fritz, A.; Kattenborn, T.; Koch, B. UAV-based photogrammetric point clouds—Tree stem mapping in open stands in comparison to terrestrial laser scanner point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 141–146. [Google Scholar] [CrossRef] [Green Version]
- Malhi, Y.; Jackson, T.; Bentley, L.P.; Lau, A.; Shenkin, A.; Herold, M.; Calders, K.; Bartholomeus, H.; Disney, M.I. New perspectives on the ecology of tree structure and tree communities through terrestrial laser scanning. Interface Focus 2018, 8, 20170052. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gorte, B.; Pfeifer, N. Structuring laser-scanned trees using 3D mathematical morphology. Int. Arch. Photogramm. Remote Sens. 2004, 35, 929–933. [Google Scholar]
- Hosoi, F.; Omasa, K. Voxel-based 3-D modeling of individual trees for estimating leaf area density using high-resolution portable scanning lidar. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3610–3618. [Google Scholar] [CrossRef]
- Widlowski, J.L.; Côté, J.F.; Béland, M. Abstract tree crowns in 3D radiative transfer models: Impact on simulated open-canopy reflectances. Remote Sens. Environ. 2014, 142, 155–175. [Google Scholar] [CrossRef]
- Raumonen, P.; Kaasalainen, M.; Åkerblom, M.; Kaasalainen, S.; Kaartinen, H.; Vastaranta, M.; Holopainen, M.; Disney, M.; Lewis, P. Fast automatic precision tree models from terrestrial laser scanner data. Remote Sens. 2013, 5, 491–520. [Google Scholar] [CrossRef] [Green Version]
- Douglas, E.S.; Martel, J.; Li, Z.; Howe, G.; Hewawasam, K.; Marshall, R.A.; Schaaf, C.L.; Cook, T.A.; Newnham, G.J.; Strahler, A.; et al. Finding leaves in the forest: The dual-wavelength Echidna lidar. IEEE Geosci. Remote Sens. Lett. 2015, 12, 776–780. [Google Scholar] [CrossRef]
- Ma, L.; Zheng, G.; Eitel, J.U.; Magney, T.S.; Moskal, L.M. Determining woody-to-total area ratio using terrestrial laser scanning (TLS). Agric. For. Meteorol. 2016, 228, 217–228. [Google Scholar] [CrossRef] [Green Version]
- Pueschel, P.; Newnham, G.; Rock, G.; Udelhoven, T.; Werner, W.; Hill, J. The influence of scan mode and circle fitting on tree stem detection, stem diameter and volume extraction from terrestrial laser scans. ISPRS J. Photogramm. Remote. Sens. 2013, 77, 44–56. [Google Scholar] [CrossRef]
- Dassot, M.; Colin, A.; Santenoise, P.; Fournier, M.; Constant, T. Terrestrial laser scanning for measuring the solid wood volume, including branches, of adult standing trees in the forest environment. Comput. Electron. Agric. 2012, 89, 86–93. [Google Scholar] [CrossRef]
- De Tanago, J.G.; Lau, A.; Bartholomeus, H.; Herold, M.; Avitabile, V.; Raumonen, P.; Martius, C.; Goodman, R.C.; Disney, M.; Manuri, S.; et al. Estimation of above-ground biomass of large tropical trees with terrestrial LiDAR. Methods Ecol. Evol. 2018, 9, 223–234. [Google Scholar] [CrossRef] [Green Version]
- Kankare, V.; Holopainen, M.; Vastaranta, M.; Puttonen, E.; Yu, X.; Hyyppä, J.; Vaaja, M.; Hyyppä, H.; Alho, P. Individual tree biomass estimation using terrestrial laser scanning. ISPRS J. Photogramm. Remote Sens. 2013, 75, 64–75. [Google Scholar] [CrossRef]
- Hauglin, M.; Astrup, R.; Gobakken, T.; Næsset, E. Estimating single-tree branch biomass of Norway spruce with terrestrial laser scanning using voxel-based and crown dimension features. Scand. J. For. Res. 2013, 28, 456–469. [Google Scholar] [CrossRef]
- MacArthur, R.H.; Horn, H.S. Foliage profile by vertical measurements. Ecology 1969, 50, 802–804. [Google Scholar] [CrossRef] [Green Version]
- Danson, F.M.; Hetherington, D.; Morsdorf, F.; Koetz, B.; Allgower, B. Forest canopy gap fraction from terrestrial laser scanning. IEEE Geosci. Remote Sens. Lett. 2007, 4, 157–160. [Google Scholar] [CrossRef] [Green Version]
- Jupp, D.L.; Culvenor, D.S.; Lovell, J.L.; Newnham, G.J.; Strahler, A.H.; Woodcock, C.E. Estimating forest LAI profiles and structural parameters using a ground-based laser called ‘Echidna®. Tree Physiol. 2009, 29, 171–181. [Google Scholar] [CrossRef]
- Strahler, A.H.; Jupp, D.L.; Woodcock, C.E.; Schaaf, C.B.; Yao, T.; Zhao, F.; Yang, X.; Lovell, J.; Culvenor, D.; Newnham, G.; et al. Retrieval of forest structural parameters using a ground-based lidar instrument (Echidna®). Can. J. Remote Sens. 2008, 34, S426–S440. [Google Scholar] [CrossRef] [Green Version]
- Hopkinson, C.; Lovell, J.; Chasmer, L.; Jupp, D.; Kljun, N.; van Gorsel, E. Integrating terrestrial and airborne lidar to calibrate a 3D canopy model of effective leaf area index. Remote Sens. Environ. 2013, 136, 301–314. [Google Scholar] [CrossRef]
- Zheng, G.; Ma, L.; He, W.; Eitel, J.U.; Moskal, L.M.; Zhang, Z. Assessing the contribution of woody materials to forest angular gap fraction and effective leaf area index using terrestrial laser scanning data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1475–1487. [Google Scholar] [CrossRef]
- Zhu, X.; Skidmore, A.K.; Wang, T.; Liu, J.; Darvishzadeh, R.; Shi, Y.; Premier, J.; Heurich, M. Improving leaf area index (LAI) estimation by correcting for clumping and woody effects using terrestrial laser scanning. Agric. For. Meteorol. 2018, 263, 276–286. [Google Scholar] [CrossRef]
- Morsdorf, F.; Kötz, B.; Meier, E.; Itten, K.I.; Allgöwer, B. Estimation of LAI and fractional cover from small footprint airborne laser scanning data based on gap fraction. Remote Sens. Environ. 2006, 104, 50–61. [Google Scholar] [CrossRef]
- Solberg, S.; Næsset, E.; Hanssen, K.H.; Christiansen, E. Mapping defoliation during a severe insect attack on Scots pine using airborne laser scanning. Remote Sens. Environ. 2006, 102, 364–376. [Google Scholar] [CrossRef]
- Barilotti, A.; Turco, S.; Alberti, G. LAI determination in forestry ecosystem by LiDAR data analysis. In Proceedings of the International Workshop 3D Remote Sensing in Forestry, Vienna, Austria, 14–15 February 2006; pp. 248–252. [Google Scholar]
- Jensen, J.L.; Humes, K.S.; Vierling, L.A.; Hudak, A.T. Discrete return lidar-based prediction of leaf area index in two conifer forests. Remote Sens. Environ. 2008, 112, 3947–3957. [Google Scholar] [CrossRef] [Green Version]
- Korhonen, L.; Korpela, I.; Heiskanen, J.; Maltamo, M. Airborne discrete-return LIDAR data in the estimation of vertical canopy cover, angular canopy closure and leaf area index. Remote Sens. Environ. 2011, 115, 1065–1080. [Google Scholar] [CrossRef]
- Hayduk, E.A. Using LiDAR Data to Estimate Effective Leaf Area Index, Determine Biometrics and Visualize Canopy Structure in a Central Oregon Forest with Complex Terrain. Ph.D. Thesis, Evergreen State College, Olympia, WA, USA, 2012. [Google Scholar]
- You, H.; Wang, T.; Skidmore, A.; Xing, Y. Quantifying the effects of normalisation of airborne LiDAR intensity on coniferous forest leaf area index estimations. Remote Sens. 2017, 9, 163. [Google Scholar] [CrossRef] [Green Version]
- Qu, Y.; Shaker, A.; Silva, C.; Klauberg, C.; Pinagé, E. Remote Sensing of Leaf Area Index from LiDAR Height Percentile Metrics and Comparison with MODIS Product in a Selectively Logged Tropical Forest Area in Eastern Amazonia. Remote Sens. 2018, 10, 970. [Google Scholar] [CrossRef] [Green Version]
- Ni-Meister, W.; Jupp, D.L.; Dubayah, R. Modeling lidar waveforms in heterogeneous and discrete canopies. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1943–1958. [Google Scholar] [CrossRef] [Green Version]
- Ni-Meister, W.; Yang, W.; Kiang, N.Y. A clumped-foliage canopy radiative transfer model for a global dynamic terrestrial ecosystem model. I: Theory. Agric. Forest Meteorol. 2010, 150, 881–894. [Google Scholar] [CrossRef]
- Tang, H.; Dubayah, R.; Swatantran, A.; Hofton, M.; Sheldon, S.; Clark, D.B.; Blair, B. Retrieval of vertical LAI profiles over tropical rain forests using waveform lidar at La Selva, Costa Rica. Remote Sens. Environ. 2012, 124, 242–250. [Google Scholar] [CrossRef]
- Treuhaft, R.N.; Asner, G.P.; Law, B.E.; Van Tuyl, S. Forest leaf area density profiles from the quantitative fusion of radar and hyperspectral data. J. Geophys. Res. Atmos. 2002, 107, ACL 7. [Google Scholar] [CrossRef]
- Treuhaft, R.N.; Law, B.E.; Asner, G.P. Forest attributes from radar interferometric structure and its fusion with optical remote sensing. Aibs Bull. 2004, 54, 561–571. [Google Scholar] [CrossRef] [Green Version]
- Peduzzi, A.; Wynne, R.H.; Thomas, V.A.; Nelson, R.F.; Reis, J.J.; Sanford, M. Combined use of airborne lidar and DBInSAR data to estimate LAI in temperate mixed forests. Remote Sens. 2012, 4, 1758–1780. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Kankare, V.; Yu, X.; Hyyppä, J.; Holopainen, M. Automated stem curve measurement using terrestrial laser scanning. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1739–1748. [Google Scholar] [CrossRef]
- Hosoi, F.; Nakai, Y.; Omasa, K. 3-D voxel-based solid modeling of a broad-leaved tree for accurate volume estimation using portable scanning lidar. ISPRS J. Photogramm. Remote Sens. 2013, 82, 41–48. [Google Scholar] [CrossRef]
- Villikka, M.; Packalén, P.; Maltamo, M. The suitability of leaf-off airborne laser scanning data in an area-based forest inventory of coniferous and deciduous trees. Silva Fenn. 2012, 46, 99–110. [Google Scholar] [CrossRef] [Green Version]
- Tang, H.; Brolly, M.; Zhao, F.; Strahler, A.H.; Schaaf, C.L.; Ganguly, S.; Zhang, G.; Dubayah, R. Deriving and validating Leaf Area Index (LAI) at multiple spatial scales through lidar remote sensing: A case study in Sierra National Forest, CA. Remote Sens. Environ. 2014, 143, 131–141. [Google Scholar] [CrossRef]
- Manninen, T.; Stenberg, P.; Rautiainen, M.; Voipio, P.; Smolander, H. Leaf area index estimation of boreal forest using ENVISAT ASAR. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2627–2635. [Google Scholar] [CrossRef]
- Stankevich, S.A.; Kozlova, A.A.; Piestova, I.O.; Lubskyi, M.S. Leaf area index estimation of forest using sentinel-1 C-band SAR data. In Proceedings of the 2017 IEEE Microwaves, Radar and Remote Sensing Symposium (MRRS), Kiev, Ukraine, 29–31 August 2017; pp. 253–256. [Google Scholar]
- Fathi-Moghadam, M.; Kouwen, N. Nonrigid, nonsubmerged, vegetative roughness on floodplains. J. Hydraul. Eng. 1997, 123, 51–57. [Google Scholar] [CrossRef]
- Mason, D.C.; Cobby, D.M.; Horritt, M.S.; Bates, P.D. Floodplain friction parameterization in two-dimensional river flood models using vegetation heights derived from airborne scanning laser altimetry. Hydrol. Process. 2003, 17, 1711–1732. [Google Scholar] [CrossRef]
- Lindner, K. Der Strömungswiderstand von Pflanzenbeständen. Ph.D. Thesis, Mitteilungen 75, Leichtweiss-Institut für Wasserbau, TU Braunschweig, Braunschweig, Germany, 1982. [Google Scholar]
- Archaux, F.; Martin, H. Hybrid poplar plantations in a floodplain have balanced impacts on farmland and woodland birds. Forest Ecol. Manag. 2009, 257, 1474–1479. [Google Scholar] [CrossRef] [Green Version]
- FAO. Poplars and Other Fast-Growing Trees - Renewable Resources for Future Green Economies. Synthesis of Country Progress Reports. In Proceedings of the 25th Session of the International Poplar Commission, Berlin, Germany, 13–16 September 2016; Working Paper IPC/15. Forestry Policy and Resources Division, FAO: Rome, Italy, 2016. Available online: http://www.fao.org/forestry/ipc2016/en/ (accessed on 1 April 2020).
- Ball, J.; Carle, J.; Del Lungo, A. Contribution of poplars and willows to sustainable forestry and rural development. UNASYLVA-FAO 2005, 56, 3. [Google Scholar]
- Mason, W.L.; Alía, R. Current and future status of Scots pine (Pinus sylvestris L.) forests in Europe. Forest Syst. 2000, 9, 317–335. [Google Scholar]
- Forestry Commission. Forestry Statistics 2018; Forestry Commission: Edinburgh, UK, 2018. [Google Scholar]
- Forestry Commission. North Tummel Land Management Plan; Forestry Commission: Edinburgh, UK, 2018; Available online: https://forestryandland.gov.scot/images/corporate/design-plans/tay/north-tummel/Draft_North_Tummel_LMP_summary.pdf (accessed on 1 May 2020).
- Robeson, D. River Floodplains and Natural Flood Management in Farmed Land; Technical Note TN646; The Scottish Agricultural College: Perth, UK, 2012. [Google Scholar]
- Heym, M.; Ruíz-Peinado, R.; Del Río, M.; Bielak, K.; Forrester, D.I.; Dirnberger, G.; Barbeito, I.; Brazaitis, G.; Ruškytkė, I.; Coll, L.; et al. EuMIXFOR empirical forest mensuration and ring width data from pure and mixed stands of Scots pine (Pinus sylvestris L.) and European beech (Fagus sylvatica L.) through Europe. Ann. For. Sci. 2017, 74, 63. [Google Scholar] [CrossRef] [Green Version]
- Price, C.A.; Enquist, B.J.; Savage, V.M. A general model for allometric covariation in botanical form and function. Proc. Natl. Acad. Sci. 2007, 104, 13204–13209. [Google Scholar] [CrossRef] [Green Version]
- Smith, D.D.; Sperry, J.S.; Enquist, B.J.; Savage, V.M.; McCulloh, K.A.; Bentley, L.P. Deviation from symmetrically self-similar branching in trees predicts altered hydraulics, mechanics, light interception and metabolic scaling. New Phytol. 2014, 201, 217–229. [Google Scholar] [CrossRef]
- Muukkonen, P. Generalized allometric volume and biomass equations for some tree species in Europe. Eur. J. For. Res. 2007, 126, 157–166. [Google Scholar] [CrossRef]
- Medvigy, D.; Wofsy, S.C.; Munger, J.W.; Hollinger, D.Y.; Moorcroft, P.R. Mechanistic scaling of ecosystem function and dynamics in space and time: Ecosystem Demography model version 2. J. Geophys. Res. Biogeosci. 2009, 114, G01002. [Google Scholar] [CrossRef] [Green Version]
- Xiao, C.W.; Janssens, I.A.; Yuste, J.C.; Ceulemans, R. Variation of specific leaf area and upscaling to leaf area index in mature Scots pine. Trees 2006, 20, 304. [Google Scholar] [CrossRef]
- Ter-Mikaelian, M.T.; Korzukhin, M.D. Biomass equations for sixty-five North American tree species. For. Ecol. Manag. 1997, 97, 1–24. [Google Scholar] [CrossRef] [Green Version]
- Tricker, P.J.; Calfapietra, C.; Kuzminsky, E.; Puleggi, R.; Ferris, R.; Nathoo, M.; Pleasants, L.J.; Alston, V.; De Angelis, P.; Taylor, G. Long-term acclimation of leaf production, development, longevity and quality following 3 yr exposure to free-air CO2 enrichment during canopy closure in Populus. New Phytol. 2004, 162, 413–426. [Google Scholar] [CrossRef]
- Ferris, R.; Sabatti, M.; Miglietta, F.; Mills, R.F.; Taylor, G. Leaf area is stimulated in Populus by free air CO2 enrichment (POPFACE), through increased cell expansion and production. Plant Cell Environ. 2001, 24, 305–315. [Google Scholar] [CrossRef]
- Västilä, K.; Järvelä, J. Modeling the flow resistance of woody vegetation using physically based properties of the foliage and stem. Water Resour. Res. 2014, 50, 229–245. [Google Scholar] [CrossRef]
- Lugeri, N.; Kundzewicz, Z.W.; Genovese, E.; Hochrainer, S.; Radziejewski, M. River flood risk and adaptation in Europe—Assessment of the present status. Mitig. Adapt. Strateg. Glob. Chang. 2010, 15, 621–639. [Google Scholar] [CrossRef]
- De Bruijn, K.M.; Klijn, F.; Knoeff, J.G.; Schweckendiek, T. Unbreachable embankments? In pursuit of the most effective stretches for reducing fatality risk. In Comprehensive flood risk management. Research for policy and practice. In Proceedings of the 2nd European Conference on Flood Risk Management, FLOODrisk2012, Rotterdam, The Netherlands, 19–23 November 2013; pp. 19–23. [Google Scholar]
- Chow, V. Open-Channel Hydraulics; Mc Graw-Hill: New York, NY, USA, 1959. [Google Scholar]
- Harr, R.D. Effects of clearcutting on rain-on-snow runoff in western Oregon: A new look at old studies. Water Resour. Res. 1986, 22, 1095–1100. [Google Scholar] [CrossRef]
- Ghavasieh, A.R.; Poulard, C.; Paquier, A. Effect of roughened strips on flood propagation: Assessment on representative virtual cases and validation. J. Hydrol. 2006, 318, 121–137. [Google Scholar] [CrossRef] [Green Version]
- Anderson, B.G.; Rutherfurd, I.D.; Western, A.W. An analysis of the influence of riparian vegetation on the propagation of flood waves. Environ. Modeling Softw. 2006, 21, 1290–1296. [Google Scholar] [CrossRef]
- Dixon, S.J.; Sear, D.A.; Odoni, N.A.; Sykes, T.; Lane, S.N. The effects of river restoration on catchment scale flood risk and flood hydrology. Earth Surf. Process. Landf. 2016, 41, 997–1008. [Google Scholar] [CrossRef]
- Friedl, M.; Sulla-Menashe, D.; Tan, B.; Schneider, A.; Ramankutty, N.; Sibley, A.; Huang, X. (MODIS Collection 5 global land cover: Algorithm refinements and characterization of new datasets. Remote Sens. Environ. 2010, 114, 168–182. [Google Scholar] [CrossRef]
- Rowland, C.S.; Morton, R.D.; Carrasco, L.; McShane, G.; O’Neil, A.W.; Wood, C.M. Land Cover Map 2015 (25m raster, GB); NERC Environmental Information Data Centre: Lancaster, UK, 2017. [Google Scholar] [CrossRef]
- Goodenough, D.G.; Dyk, A.; Niemann, K.O.; Pearlman, J.S.; Chen, H.; Han, T.; Murdoch, M.; West, C. Processing hyperion and ali for forest classification. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1321–1331. [Google Scholar] [CrossRef]
- Clark, M.L.; Roberts, D.A.; Clark, D.B. Hyperspectral discrimination of tropical rain forest tree species at leaf to crown scales. Remote Sens. Environ. 2005, 96, 375–398. [Google Scholar] [CrossRef]
- Martin, M.E.; Newman, S.D.; Aber, J.D.; Congalton, R.G. Determining forest species composition using high spectral resolution remote sensing data. Remote Sens. Environ. 1998, 65, 249–254. [Google Scholar] [CrossRef]
- Kokaly, R.F.; Despain, D.G.; Clark, R.N.; Livo, K.E. Mapping vegetation in Yellowstone National Park using spectral feature analysis of AVIRIS data. Remote Sens. Environ. 2003, 84, 437–456. [Google Scholar] [CrossRef] [Green Version]
- Roth, K.L.; Roberts, D.A.; Dennison, P.E.; Alonzo, M.; Peterson, S.H.; Beland, M. Differentiating plant species within and across diverse ecosystems with imaging spectroscopy. Remote Sens. Environ. 2015, 167, 135–151. [Google Scholar] [CrossRef]
- Roberts, D.A.; Gardner, M.; Church, R.; Ustin, S.; Scheer, G.; Green, R.O. Mapping Chaparral in the Santa Monica Mountains using multiple endmember spectral mixture models. Remote Sens. Environ. 1998, 65, 267–279. [Google Scholar] [CrossRef]
- Dennison, P.E.; Roberts, D.A. Endmember Selection for Multiple Endmember Spectral Mixture Analysis using Endmember Average RSME. Remote Sens. Environ. 2003, 87, 123–135. [Google Scholar] [CrossRef]
- Joshi, N.; Baumann, M.; Ehammer, A.; Fensholt, R.; Grogan, K.; Hostert, P.; Jepsen, M.R.; Kuemmerle, T.; Meyfroidt, P.; Mitchard, E.T.; et al. A review of the application of optical and radar remote sensing data fusion to land use mapping and monitoring. Remote Sens. 2016, 8, 70. [Google Scholar] [CrossRef] [Green Version]
- Lin, Y.; Herold, M. Tree species classification based on explicit tree structure feature parameters derived from static terrestrial laser scanning data. Agric. For. Meteorol. 2016, 216, 105–114. [Google Scholar] [CrossRef]
- Morsy, S.; Shaker, A.; El-Rabbany, A. Multispectral LiDAR data for land cover classification of urban areas. Sensors 2017, 17, 958. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Graham, I.G.; Hou, T.Y.; Lakkis, O.; Scheichl, R. (Eds.) Numerical Analysis of Multiscale Problems (Vol. 83); Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Abu-Aly, T.R.; Pasternack, G.B.; Wyrick, J.R.; Barker, R.; Massa, D.; Johnson, T. Effects of LiDAR-derived, spatially distributed vegetation roughness on two-dimensional hydraulics in a gravel-cobble river at flows of 0.2 to 20 times bankfull. Geomorphology 2014, 206, 468–482. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forest Structural Attribute | Uncertainty | Remote Sensing Instrument | Condition/Explanation | Sources |
| Stem Density/Number | 0–13% | TLS | 212–400 stem/ha with single/multiple scans | [38] Maas et al. (2008) |
| 13–37% | TLS | <1000 stem/ha with multiple scans | [37] Kankare et al. (2015) | |
| 40% | TLS | >1000 stems/ha in riparian zone | [39] Antonarakis (2011) | |
| 5% | TLS | 605–1210 stem/ha with multiple scans | [42] Liang and Hyyppä (2013) | |
| 20% | TLS | <400 stems/ha with single scan | [36] Liang et al. (2016) | |
| 30% | TLS | >1000 stems/ha with single scan | [36] Liang et al. (2016) | |
| 2–35% | ALS (small footprint) | 200–1200 stem/ha | [50] Antonarakis et al. (2008a) | |
| 0–7% | ALS (small footprint) | Plantations/ Overstory trees | [47,49] Hyyppä et al. (2008); Kuthuria et al. (2016); | |
| 22–29% | ALS (small footprint) | Plantations/ Overstory trees | [48,55] Huang et al. (2009); Persson et al. (2002) | |
| 6–34% | ALS (large footprint) | 498–1380 stems/ha | [51] Antonarakis et al. (2014) | |
| 8–20% | UAV Lidar | 680–1560 stems/ha | [52] Wallace et al. (2014) | |
| <30% | UAV Photogrammetry | [53,65] Korpela (2004) / Fritz et al. (2013) | ||
| <20% | Multispectral (high-res) | Overstory trees | [44,45,46] Pouliot et al. (2002); Culvenor (2002); Ke and Quackenbush (2011) | |
| Trunk Diameter | 1.5–3.25 cm | TLS | 212–400 stem/ha with single scans | [38] Maas et al. (2008) |
| 1.55–1.78 cm (6.4–8.5%) | TLS | <1000 stem/ha with multiple scans | [37] Kankare et al. (2015) | |
| <1cm | TLS | >2000 stems/ha with multiple scans | [39] Antonarakis (2011) | |
| 1.44 cm (7.5%) | TLS | 605–1210 stem/ha with multiple scans | [42] Liang & Hyyppä (2013) | |
| 3.4 cm | TLS | 753 stems/ha with single scan | [40] Brolly and Kiraly (2009) | |
| 3.3–5.9 cm (12–21%) | TLS | 358–1042 stems/ha with single scans | [41] Olofsson et al. (2014) | |
| 2.39 cm (4–20%) | TLS | 317–345 stems/ha with multiple scans | [43] Calders et al. (2015) | |
| 1.37–4.7 cm (5–23%) | ALS (small footprint) | <1000 stem/ha with multiple scans | [37] Kankare et al. (2015) | |
| 10–20% | ALS (small footprint) | 200–1200 stem/ha | [50] Antonarakis et al. (2008a) | |
| 10–21% | ALS (small footprint) | Scandinavian Conifers | [55,57] Persson et al. (2002); Yu et al (2011) | |
| 4.9 cm (18%) | ALS (small footprint) | USA Pine | [56] Popescu (2007) | |
| 4.2/5.2 cm (9/14%) | ALS (small footprint) | Conifers/Deciduous | [58] Yao et al. (2013) | |
| 2.45–5.7 cm (12–31%) | ALS (large footprint) | Average DBH per plot | [51] Antonarakis et al. (2014) | |
| 3.4/5.3 cm (14/21%) | High-Res Multispectral/Radar | Scandinavian Conifers | [63] Yu et al. (2015) |
| Forest Structural Attribute | Uncertainty | Remote Sensing Instrument | Condition/Explanation | Sources |
|---|---|---|---|---|
| Wood Area Index | 9–10% | TLS | Stem Volume (up to 26 m) | [99] Liang et al. (2014) |
| 6% to –2% | TLS | Stem Volume | [73] Pueschel et al. (2013) | |
| <30% | TLS | Branch Volume > 7 cm branches | [74] Dassot et al. (2012) | |
| 34% | TLS | Branch Volume | [100] Hosoi et al. (2013) | |
| 24% | TLS | Total Volume | [75] Gonzalez de Tanago et al. (2017) | |
| 23–38% | TLS | Biomass (Living Branches) | [76] Kankare et al. (2013) | |
| 32% / 35% | TLS / ALS | Biomass (Crown) | [77] Hauglin et al. (2013) | |
| 16% | TLS | Biomass (Total) | [43] Calders et al. (2015) | |
| 40% | TLS | Surface Area (Mesh vs Voxel methods) | [23] Antonarakis et al. (2009) | |
| 10% (~0.025 m2) | TLS | Surface Area (Stem) | [72] Ma et al. (2016) | |
| 30–47% | ALS | Total Volume | [101] Villikka et al. (2012) | |
| Leaf Area Index | 7.5% (0.15 m2/m2) | TLS | LAI = 1.98 | [81] Strahler et al. (2008) |
| 0.7–17% | TLS | [68] Hosoi and Omasa (2006) | ||
| 8% (0.13 m2/m2) | TLS | 1.3–1.9 LAI range | [82] Hopkinson et al. (2013) | |
| 32–46% | TLS | Up to 3.5 LAI range | [84] Zhu et al. (2018) | |
| ~30% (1.14 m2/m2) | TLS | 0.2–6.5 LAI range | [83] Zheng et al. (2016) | |
| 6% (0.26 m2/m2) | ALS (small footprint) | 3.2–5.8 LAI range | [87] Barilotti et al. (2006) | |
| <10% (0.091–0.167 m2/m2) | ALS (small footprint) | 2–3.4 LAI range | [91] You et al. (2017) | |
| 29% (0.75 m2/m2) | ALS (small footprint) | 0.4–6.1 LAI range | [88] Jensen et al. (2008) | |
| 21% (1.13 m2/m2) | ALS (small footprint) | 2–12 LAI range | [92] Qu et al. (2018) | |
| 17% (1.36 m2/m2) | ALS (small footprint) | 2.91–10.39 LAI range | [90] Hayduk et al. (2012) | |
| 16% (0.38 m2/m2) | ALS (small footprint) | 0.12–4.93 LAI range | [89] Korhonen et al. (2011) | |
| 12% (0.46 m2/m2) | ALS (small footprint) | 1.34–4.9 LAI range | [98] Peduzzi et al. (2012) | |
| ~35% (0.55 m2/m2) | ALS (large footprint) | 0.5-2.4 LAI range | [102] Tang et al. (2014) | |
| 25% (1.36 m2/m2) | ALS (large footprint) | 0.2–9 LAI range | [95] Tang et al. (2012) | |
| 20% (0.9 m2/m2) | ALS (large footprint) | 0.9–7 LAI range | [51] Antonarakis et al. (2014) | |
| 15% (0.56 m2/m2) | Radar | 1.34–4.9 LAI range | [98] Peduzzi et al. (2012) | |
| 4–12% (0.27 m2/m2) | Radar | 0.62–3.48 LAI range | [103] Manninen et al. 2005 | |
| ~8% (0.11 m2/m2) | Radar | 0.5–1.75 LAI range | [104] Stankevich et al. (2017) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Antonarakis, A.S.; Milan, D.J. Uncertainty in Parameterizing Floodplain Forest Friction for Natural Flood Management, Using Remote Sensing. Remote Sens. 2020, 12, 1799. https://doi.org/10.3390/rs12111799
Antonarakis AS, Milan DJ. Uncertainty in Parameterizing Floodplain Forest Friction for Natural Flood Management, Using Remote Sensing. Remote Sensing. 2020; 12(11):1799. https://doi.org/10.3390/rs12111799
Chicago/Turabian StyleAntonarakis, Alexander S., and David J. Milan. 2020. "Uncertainty in Parameterizing Floodplain Forest Friction for Natural Flood Management, Using Remote Sensing" Remote Sensing 12, no. 11: 1799. https://doi.org/10.3390/rs12111799
APA StyleAntonarakis, A. S., & Milan, D. J. (2020). Uncertainty in Parameterizing Floodplain Forest Friction for Natural Flood Management, Using Remote Sensing. Remote Sensing, 12(11), 1799. https://doi.org/10.3390/rs12111799