Practical Recommendations for Hyperspectral and Thermal Proximal Disease Sensing in Potato and Leek Fields



Abstract
:
1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Methods
2.2.1. Test Field
2.2.2. Availability of Optical Sensors in the Market
2.2.3. SNR Based Setup Optimisation
2.2.4. Effect of Artificial Lighting on Hyperspectral Measurements in the Field
2.2.5. Effect of Artificial Lighting on Thermal Measurements in the Field
3. Results
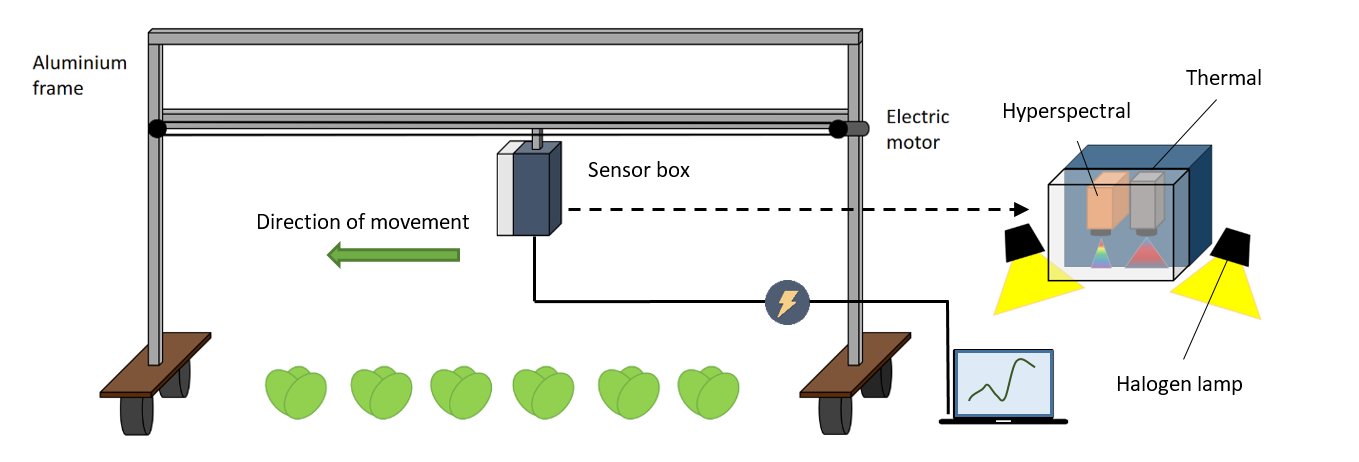
3.1. Multiple Sensor Setup
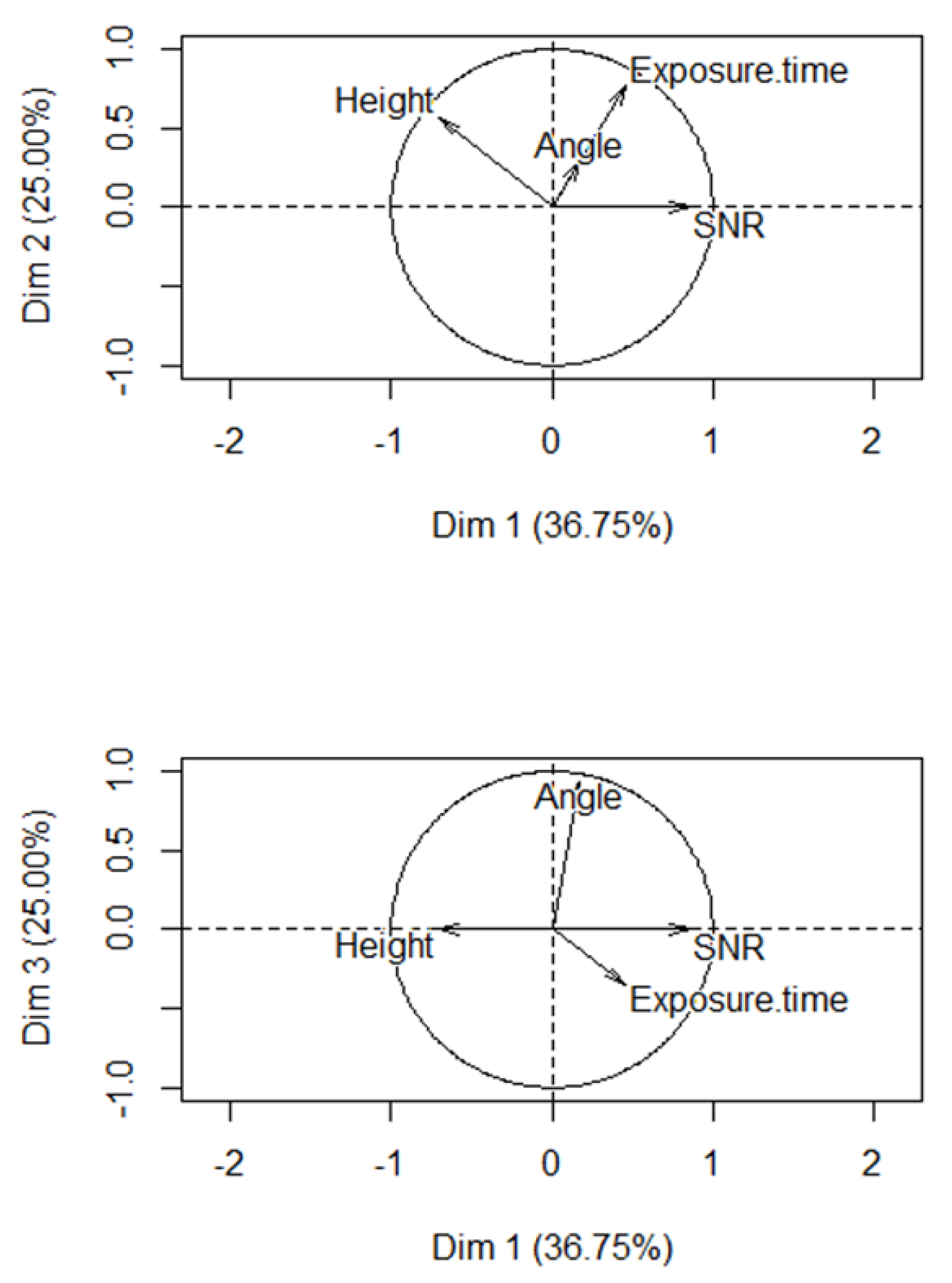
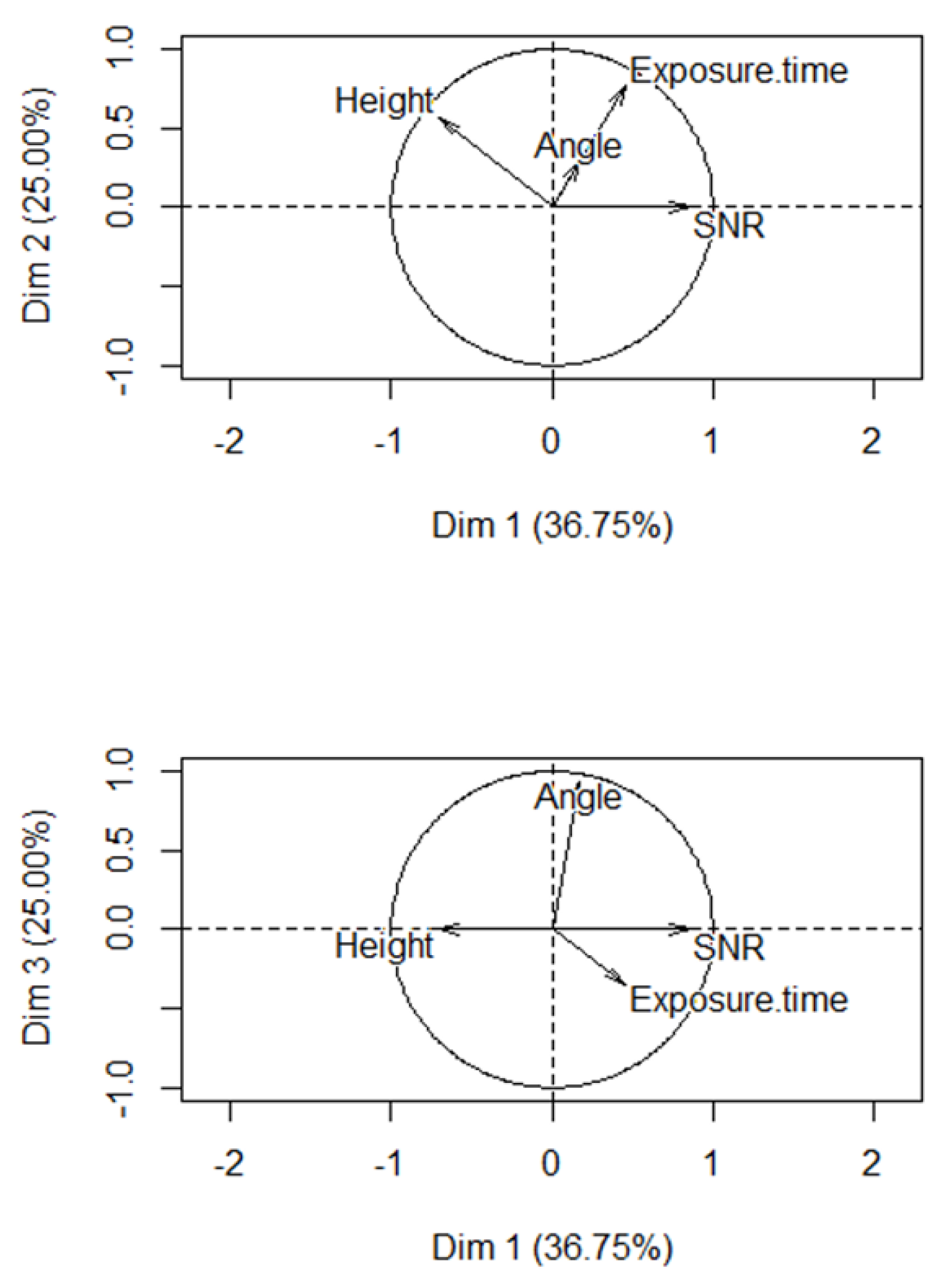
3.2. Hyperspectral Setup Optimisation
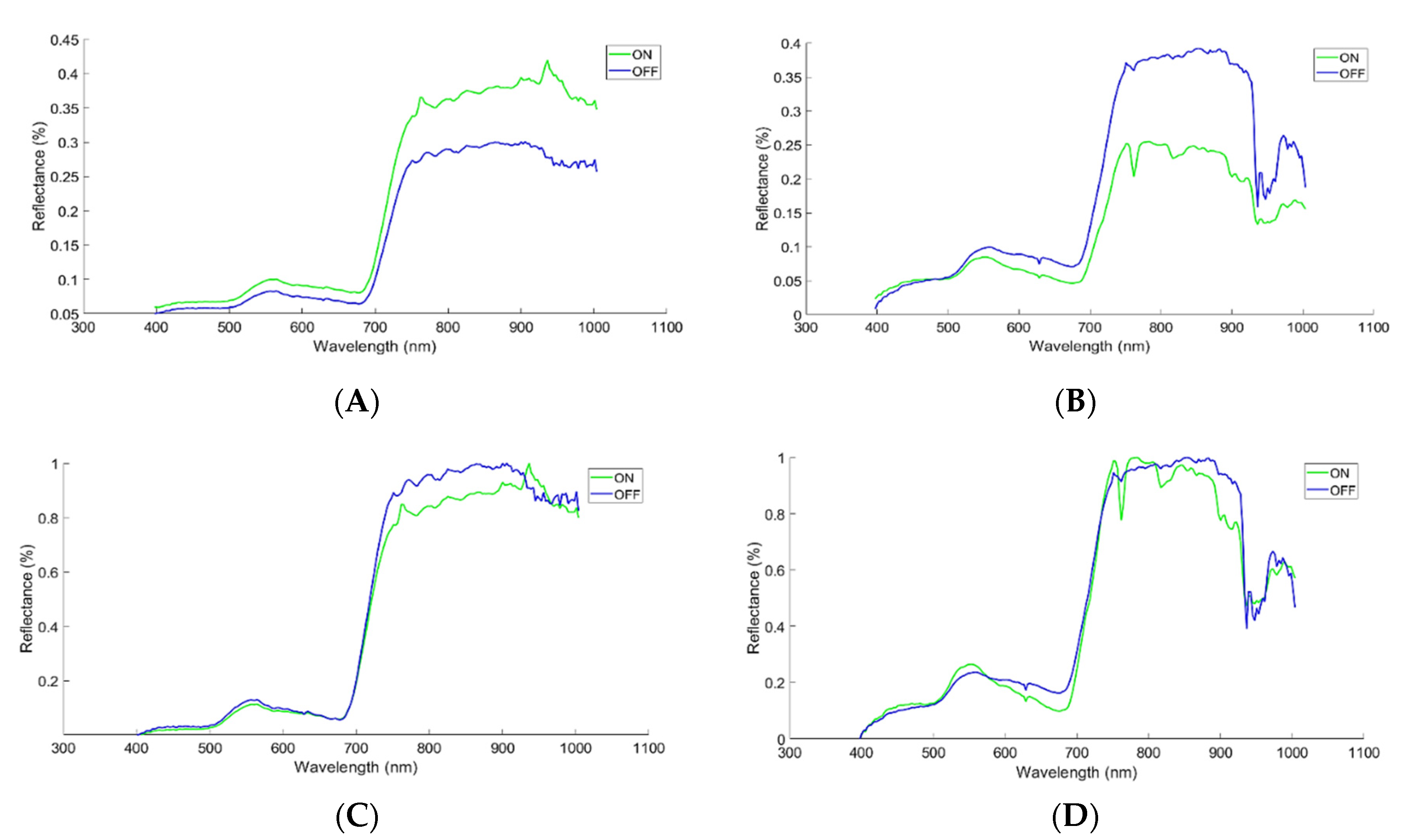
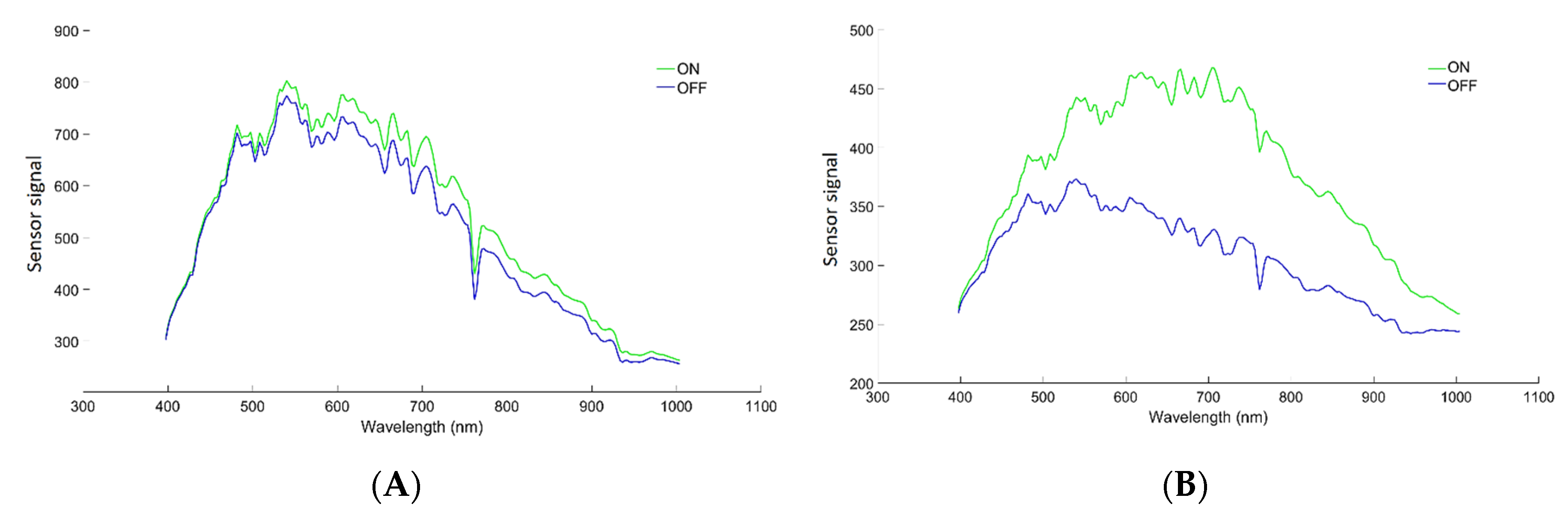
3.3. Effect of Artificial Lighting on Hyperspectral Measurements of a Crop Canopy in the Field
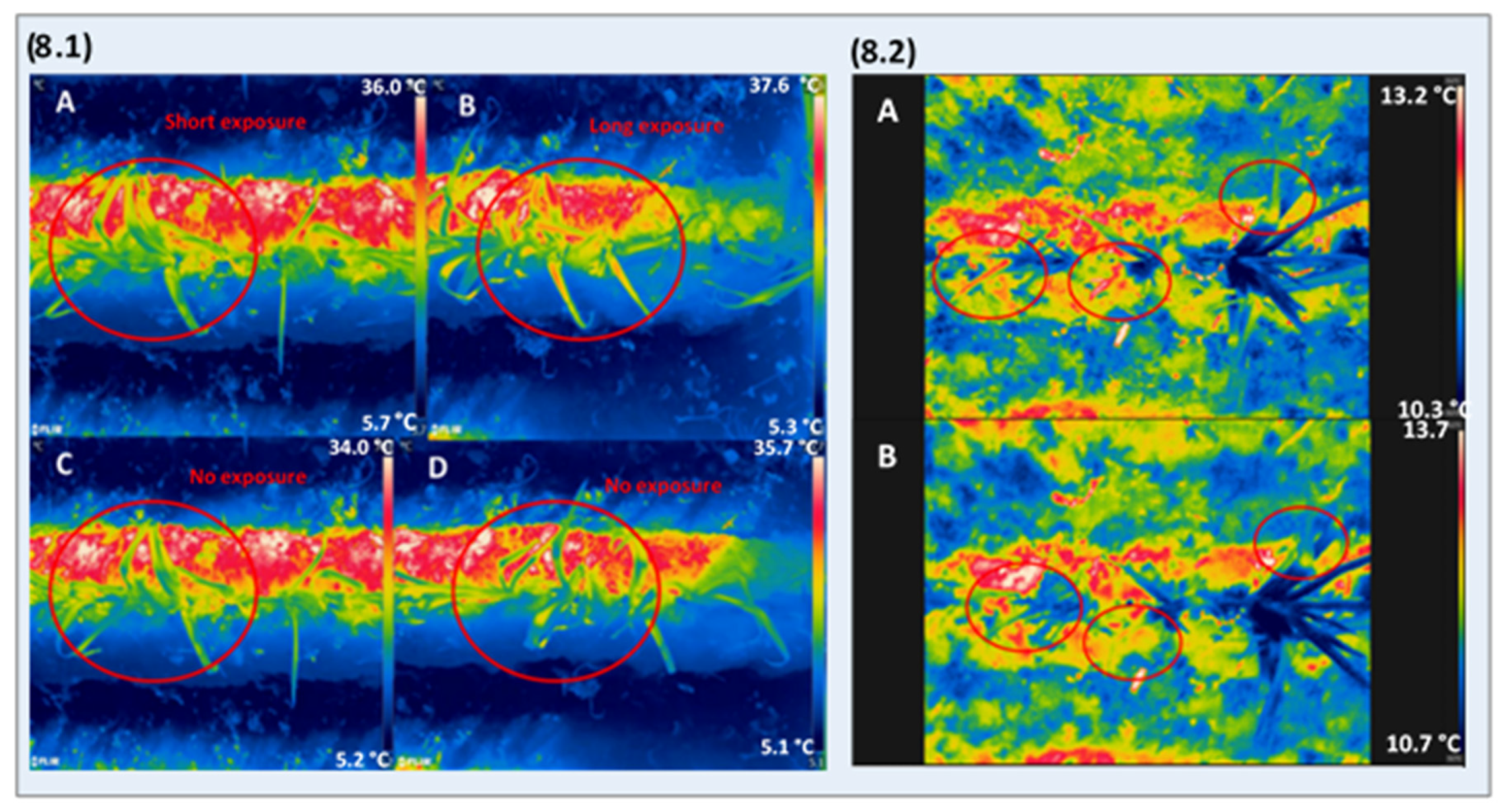
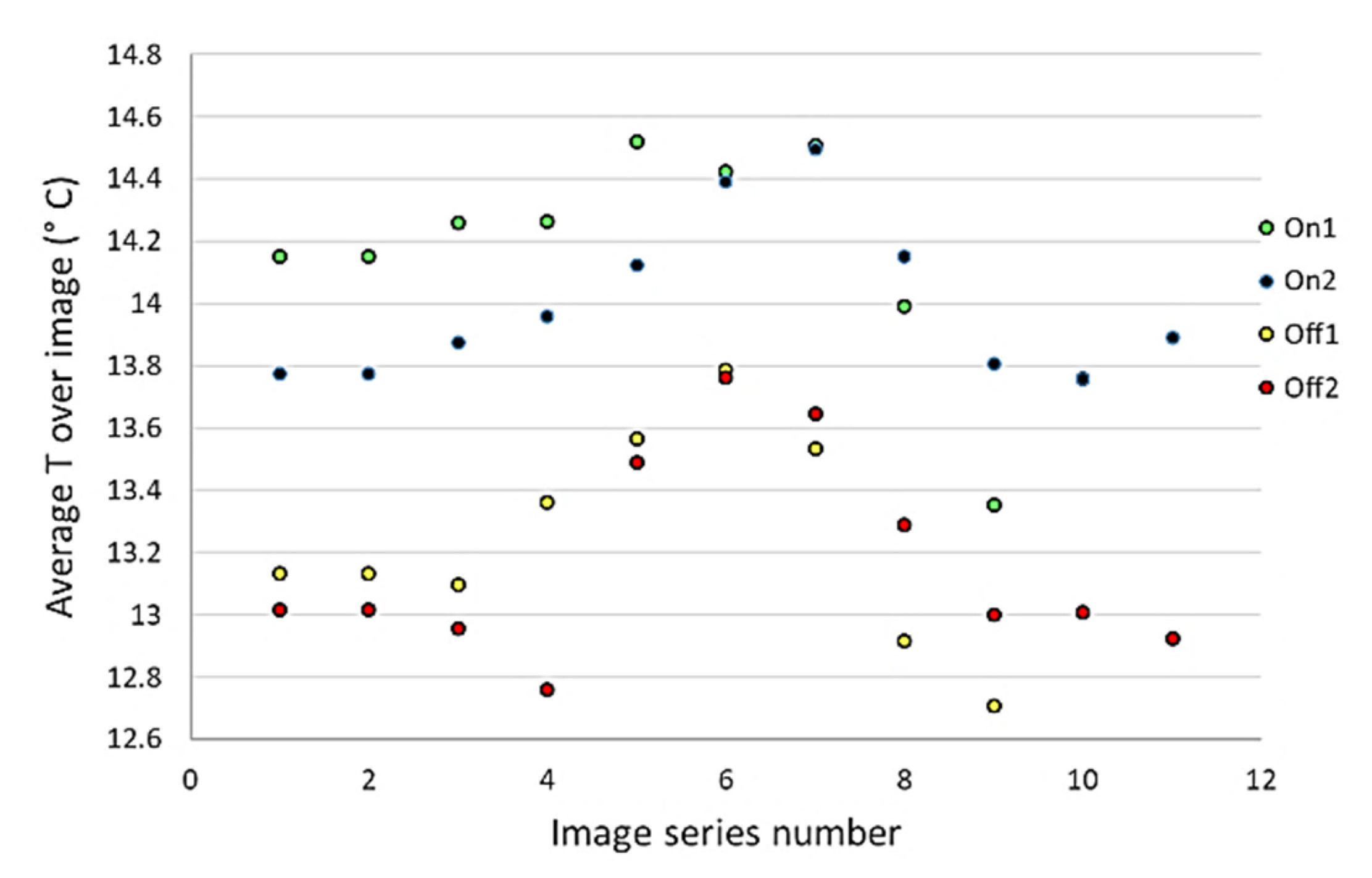
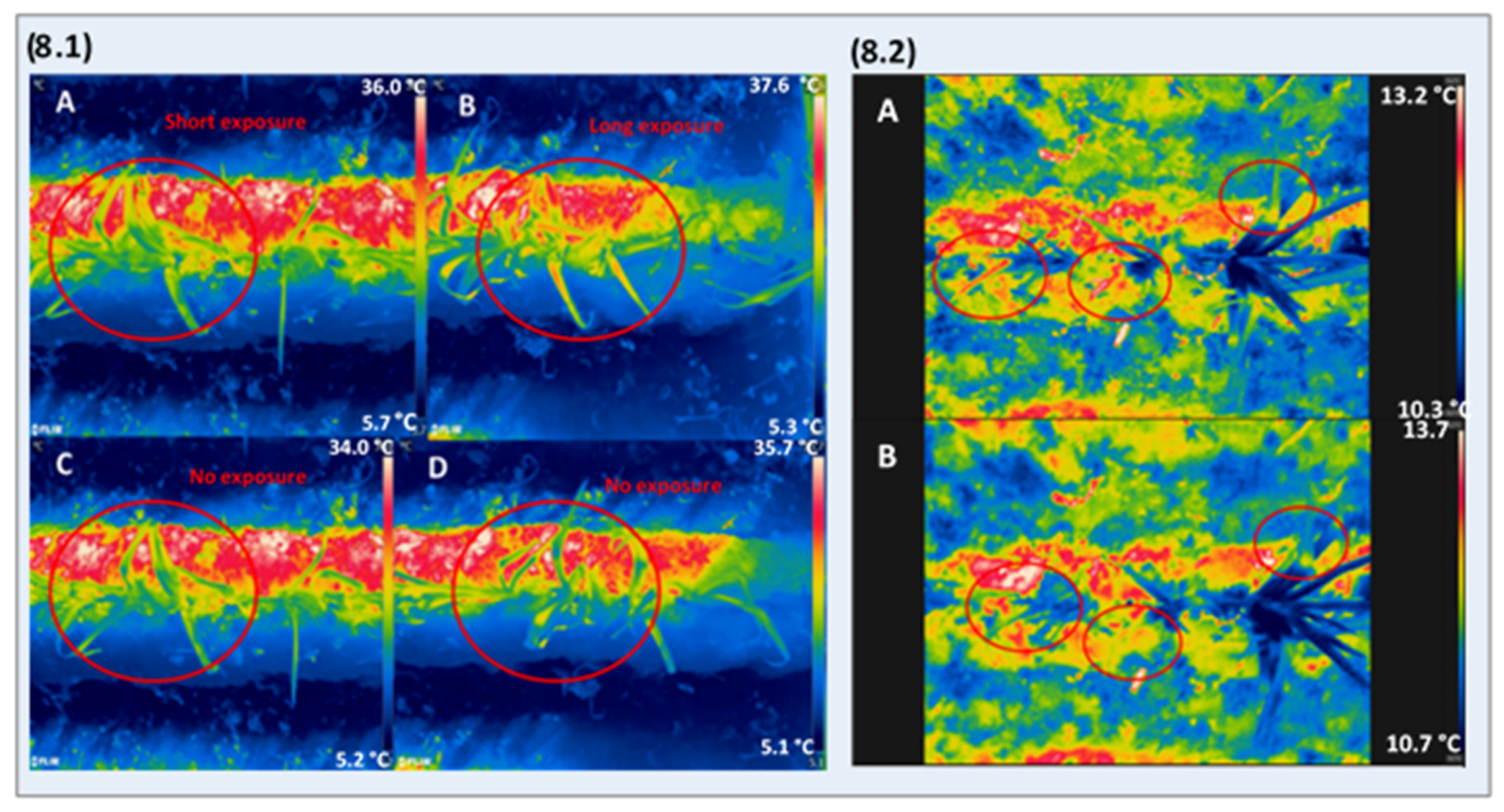
3.4. Effect of Artificial Lighting on Thermal Measurements of a Crop Canopy in the Field
4. Discussion
4.1. Multiple Sensor Setup Selection
4.2. Hyperspectral Setup Optimisation
4.3. Effect of Artificial Lighting on Hyperspectral Measurements of a Crop Canopy in the Field
4.4. Effect of Artificial Lighting on Thermal Measurements of a Crop Canopy in the Field
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Armengol, J.; Weigand, S.; Von Tiedemann, A.; Kreiter, S.; Duso, C. Education in crop protection: Erasmus Mundus Joint Master Degree–European Master Degree in Plant Health in Sustainable Cropping Systems. J. Biotechnol. 2019, 305, S8. [Google Scholar] [CrossRef]
- Agrios, G.N. Plant Pathology, 5th ed.; Elsevier Academic Press: Amsterdam, The Netherlands, 2005; Volume 26. [Google Scholar]
- Anderson, P.K.; Cunningham, A.A.; Patel, N.G.; Morales, F.J.; Epstein, P.R.; Daszak, P. Emerging infectious diseases of plants: Pathogen pollution, climate change and agrotechnology drivers. Trends Ecol. Evol. 2004, 19, 535–544. [Google Scholar] [CrossRef] [PubMed]
- Brasier, C.M. The biosecurity threat to the UK and global environment from international trade in plants. Plant Pathol. 2008, 57, 792–808. [Google Scholar] [CrossRef]
- Fisher, M.C.; Henk, D.A.; Briggs, C.J.; Brownstein, J.S.; Madoff, L.C.; McCraw, S.L.; Gurr, S.J. Emerging fungal threats to animal, plant and ecosystem health. Nature 2012, 484, 186. [Google Scholar] [CrossRef] [PubMed]
- Bebber, D.P.; Holmes, T.; Gurr, S.J. The global spread of crop pests and pathogens. Glob. Ecol. Biogeogr. 2014, 23, 1398–1407. [Google Scholar] [CrossRef] [Green Version]
- Coakley, S.M. Variation in climate and prediction of disease in plants. Ann. Rev. Phytopathol. 1988, 26, 163–181. [Google Scholar] [CrossRef]
- Mahlein, A.K.; Kuska, M.T.; Behmann, J.; Polder, G.; Walter, A. Hyperspectral sensors and imaging technologies in phytopathology: State of the art. Ann. Rev. Phytopathol. 2018, 56, 535–558. [Google Scholar] [CrossRef]
- Rosenzweig, C.; Iglesias, A.; Yang, X.B.; Epstein, P.R.; Chivian, E. Climate change and extreme weather events; implications for food production, plant diseases, and pests. Glob. Chang. Human Health 2001, 2, 90–104. [Google Scholar] [CrossRef]
- Bohnenkamp, D.; Behmann, J.; Mahlein, A.K. In-Field Detection of Yellow Rust in Wheat on the Ground Canopy and UAV Scale. Remote Sens. 2019, 11, 2495. [Google Scholar] [CrossRef] [Green Version]
- Mahlein, A.K. Present and Future Trends in Plant Disease Detection. Plant Dis. 2016, 100, 1–11. [Google Scholar] [CrossRef]
- Nigon, T.J.; Yang, C.; Dias Paiao, G.; Mulla, D.J.; Knight, J.F.; Fernández, F.G. Prediction of Early Season Nitrogen Uptake in Maize Using High-Resolution Aerial Hyperspectral Imagery. Remote Sens. 2020, 12, 1234. [Google Scholar] [CrossRef] [Green Version]
- Shen, L.; Gao, M.; Yan, J.; Li, Z.-L.; Leng, P.; Yang, Q.; Duan, S.-B. Hyperspectral Estimation of Soil Organic Matter Content using Different Spectral Preprocessing Techniques and PLSR Method. Remote Sens. 2020, 12, 1206. [Google Scholar] [CrossRef] [Green Version]
- Jin, X.; Li, Z.; Atzberger, C. Editorial for the Special Issue “Estimation of Crop Phenotyping Traits using Unmanned Ground Vehicle and Unmanned Aerial Vehicle Imagery”. Remote Sens. 2020, 12, 940. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Tian, H.; Wang, D.; Li, H.; Mouazen, A.M. A Novel Approach for Estimation of Above-Ground Biomass of Sugar Beet Based on Wavelength Selection and Optimized Support Vector Machine. Remote Sens. 2020, 12, 620. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Snider, J.L.; Li, C.; Rains, G.C.; Paterson, A.H. Ground Based Hyperspectral Imaging to Characterize Canopy-Level Photosynthetic Activities. Remote Sens. 2020, 12, 315. [Google Scholar] [CrossRef] [Green Version]
- Vargas, J.Q.; Bendig, J.; Mac Arthur, A.; Burkart, A.; Julitta, T.; Maseyk, K.; Thomas, R.; Siegmann, B.; Rossini, M.; Celesti, M.; et al. Unmanned Aerial Systems (UAS)-Based Methods for Solar Induced Chlorophyll Fluorescence (SIF) Retrieval with Non-Imaging Spectrometers: State of the Art. Remote Sens. 2020, 12, 1624. [Google Scholar] [CrossRef]
- Mishra, P.; Asaari, M.S.M.; Herrero-Langreo, A.; Lohumi, S.; Diezma, B.; Scheunders, P. Close range hyperspectral imaging of plants: A review. Biosyst. Eng. 2017, 164, 49–67. [Google Scholar] [CrossRef]
- Whetton, R.L.; Waine, T.W.; Mouazen, A.M. Optimising configuration of a hyperspectral imager for on-line field measurement of wheat canopy. Biosyst. Eng. 2017, 155, 84–95. [Google Scholar] [CrossRef]
- Joalland, S.; Screpanti, C.; Liebisch, F.; Varella, H.V.; Gaume, A.; Walter, A. Comparison of visible imaging, thermography and spectrometry methods to evaluate the effect of Heterodera schachtii inoculation on sugar beets. Plant Methods 2017, 13, 73. [Google Scholar] [CrossRef]
- Thenkabail, P.S.; Lyon, J.G. Hyperspectral Remote Sensing of Vegetation; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- López-Maestresalas, A.; Keresztes, J.C.; Goodarzi, M.; Arazuri, S.; Jarén, C.; Saeys, W. Non-destructive detection of blackspot in potatoes by Vis-NIR and SWIR hyperspectral imaging. Food Control 2016, 70, 229–241. [Google Scholar] [CrossRef] [Green Version]
- Fitzgerald, G.J.; Rodriguez, D.; Christensen, L.K.; Belford, R.; Sadras, V.O.; Clarke, T.R. Spectral and thermal sensing for nitrogen and water status in rainfed and irrigated wheat environments. Precision Agric. 2006, 7, 233–248. [Google Scholar] [CrossRef]
- Amigo, J.M. Practical issues of hyperspectral imaging analysis of solid dosage forms. Anal. Bioanal. Chem. 2010, 398, 93–109. [Google Scholar] [CrossRef] [PubMed]
- Franceschini, M.H.; Bartholomeus, H.; Van Apeldoorn, D.; Suomalainen, J.; Kooistra, L. Intercomparison of unmanned aerial vehicle and ground-based narrow band spectrometers applied to crop trait monitoring in organic potato production. Sensors 2017, 17, 1428. [Google Scholar] [CrossRef] [PubMed]
- Garzonio, R.; Di Mauro, B.; Colombo, R.; Cogliati, S. Surface reflectance and sun-induced fluorescence spectroscopy measurements using a small hyperspectral UAS. Remote Sens. 2017, 9, 472. [Google Scholar] [CrossRef] [Green Version]
- Thompson, L.J.; Puntel, L.A. Transforming Unmanned Aerial Vehicle (UAV) and Multispectral Sensor into a Practical Decision Support System for Precision Nitrogen Management in Corn. Remote Sens. 2020, 12, 1597. [Google Scholar] [CrossRef]
- Asner, G.P. Biophysical and biochemical sources of variability in canopy reflectance. Remote Sens. Environ. 1998, 64, 234–253. [Google Scholar] [CrossRef]
- Pinter Jr, P.J.; Jackson, R.D.; Elaine Ezra, C.; Gausman, H.W. Sun-angle and canopy-architecture effects on the spectral reflectance of six wheat cultivars. Int. J. Remote Sens. 1985, 6, 1813–1825. [Google Scholar] [CrossRef]
- Whetton, R.L.; Waine, T.W.; Mouazen, A.M. A Practical Approach to In-Situ Hyperspectral Imaging of Wheat Crop Canopies. In Proceedings of the 13th International Workshop on Advanced Infrared Technology Applications, Pisa, Italy, 29 September–2 October 2015; ISBN 978880250. [Google Scholar]
- Whetton, R.L.; Waine, T.W.; Mouazen, A.M. Hyperspectral measurements of yellow rust and fusarium head blight in cereal crops: Part 2: On-line field measurement. Biosyst. Eng. 2018, 167, 144–158. [Google Scholar] [CrossRef] [Green Version]
- Barbedo, J.G.; Tibola, C.S.; Fernandes, J.M. Detecting Fusarium head blight in wheat kernels using hyperspectral imaging. Biosyst. Eng. 2015, 131, 65–76. [Google Scholar] [CrossRef]
- Bousquet, L.; Lachérade, S.; Jacquemoud, S.; Moya, I. Leaf BRDF measurements and model for specular and diffuse components differentiation. Remote Sens. Environ. 2005, 98, 201–211. [Google Scholar] [CrossRef]
- Coops, N.C.; Smith, M.L.; Martin, M.E.; Ollinger, S.V. Prediction of eucalypt foliage nitrogen content from satellite-derived hyperspectral data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1338–1346. [Google Scholar] [CrossRef]
- Oberti, R.; Marchi, M.; Tirelli, P.; Calcante, A.; Iriti, M.; Borghese, A.N. Automatic detection of powdery mildew on grapevine leaves by image analysis: Optimal view-angle range to increase the sensitivity. Comput. Electron. Agric. 2014, 104, 1–8. [Google Scholar] [CrossRef]
- West, J.S.; Bravo, C.; Oberti, R.; Lemaire, D.; Moshou, D.; McCartney, H.A. The potential of optical canopy measurement for targeted control of field crop diseases. Annu. Rev. Phytopathol. 2003, 41, 593–614. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bravo, C.; Moshou, D.; Oberti, R.; West, J.; McCartney, A.; Bodria, L.; Ramon, H. Foliar disease detection in the field using optical sensor fusion. Agri. Eng. Int. CIGR J. Sci. Res. Dev. 2004. Manuscript FP 04 008. Vol. VI. [Google Scholar]
- Rouse, J.W., Jr. Monitoring the Vernal Advancement and Retrogradation (Green Wave Effect) of Natural Vegetation; Texas A&M Univ., College Station: Texas, TX, USA, 1974. [Google Scholar]
- Pisek, J.; Chen, J.M.; Miller, J.R.; Freemantle, J.R.; Peltoniemi, J.I.; Simic, A. Mapping forest background reflectance in a boreal region using multiangle compact airborne spectrographic imager data. IEEE Trans. Geosci. Remote Sens. 2009, 48, 499–510. [Google Scholar] [CrossRef]
- Rautiainen, M.; Lang, M.; Mõttus, M.; Kuusk, A.; Nilson, T.; Kuusk, J.; Lükk, T. Multi-angular reflectance properties of a hemiboreal forest: An analysis using CHRIS PROBA data. Remote Sens. Environ. 2008, 112, 2627–2642. [Google Scholar] [CrossRef]
- Behmann, J.; Mahlein, A.K.; Paulus, S.; Kuhlmann, H.; Oerke, E.C.; Plümer, L. Calibration of hyperspectral close-range pushbroom cameras for plant phenotyping. ISPRS J. Photogramm. Remote Sens. 2015, 106, 172–182. [Google Scholar] [CrossRef]
- Clarke, T.A.; Fryer, J.G. The development of camera calibration methods and models. Photogramm. Record 1998, 16, 51–66. [Google Scholar] [CrossRef]
- Horaud, R.; Mohr, R.; Lorecki, B. On single-scanline camera calibration. IEEE Trans. Robot. Autom. 1993, 9, 71–75. [Google Scholar] [CrossRef]
- Schowengerdt, R.A. Remote Sensing: Models and Methods for Image Processing; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Grosvenor, D.P.; Wood, R. The effect of solar zenith angle on MODIS cloud optical and microphysical retrievals within marine liquid water clouds. Atmos. Chem. Phys. 2014, 14, 7291–7321. [Google Scholar] [CrossRef] [Green Version]
- Van Beek, J.; Tits, L.; Somers, B.; Coppin, P. Stem water potential monitoring in pear orchards through WorldView-2 multispectral imagery. Remote Sens. 2013, 5, 6647–6666. [Google Scholar] [CrossRef] [Green Version]
- Declercq, B. Integrated Disease Management Based on the Life Cycle of Phytophthora Porri. Ph.D. Dissertation, Ghent University, Ghent, Belgium, 2009. [Google Scholar]
- Dasu, T.; Johnson, T. Exploratory Data Mining and Data Cleaning. John Wiley Sons: New York, NY, USA, 2003; Volume 479. [Google Scholar]
- Gates, D.M.; Keegan, H.J.; Schleter, J.C.; Weidner, V.R. Spectral properties of plants. Appl. Opt. 1965, 4, 11–20. [Google Scholar] [CrossRef]
- Rinnan, Å.; Van Den Berg, F.; Engelsen, S.B. Review of the most common pre-processing techniques for near-infrared spectra. TrAC Trends Anal. Chem. 2009, 28, 1201–1222. [Google Scholar] [CrossRef]
- Kindel, B.C.; Pilewskie, P.; Schmidt, K.S.; Coddington, O.; King, M.D. Solar spectral absorption by marine stratus clouds: Measurements and modeling. J. Geophys. Res. Atmos. 2011, 116. [Google Scholar] [CrossRef]
- Marín, D.; Martín, M.; Serrot, P.H.; Sabater, B. Thermodynamic balance of photosynthesis and transpiration at increasing CO2 concentrations and rapid light fluctuations. Biosystems 2014, 116, 21–26. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufacturer/ Distributor | Sensor | Spectral Range (nm) or Parameter Measured | Number of Bands | Data Acquisition | On-the-Go Measurement | Sensor Type | Price (excl. VAT, 2018) |
|---|---|---|---|---|---|---|---|
| Cubert | S185 – FireflEYE SE | 450–950 | 125 | S | Yes | HS | € 39.900 |
| Carbonbee | VNIR | 300–1000 | 256 | S | Yes | HS | / |
| IMEC | VNIR | 470–900 | 150 | H | No | HS | € 15.575 |
| Corning | microHSI 410 SHARK | 400–1000 | 120 | P | Yes | HS | $ 30.000 |
| HySpex | VNIR series | 400–1000 | 108–186 | P | Yes | HS | / |
| ODIN VS-1024 | 400–2500 | 427 | P | Yes | HS | / | |
| Mjolnir series | 400–1000/2500 | 200–490 | P | Yes | HS | / | |
| Bayspec | OCI-U-2000 | 600–1000 | 25 | S | Yes | HS | $ 24.980 |
| OCI-U-1000 | 600–1000 | 100 | P | Yes | HS | $ 19.980 | |
| Senop | Rikola | 500–900 | 50 | S | Yes | HS | € 32.000 |
| Mosaicmill | Rikola | 500–900 | 50 | S | Yes | HS | € 40.500 |
| Resonon | Pika L | 400–1000 | 281 | P | Yes | HS | € 13.640 |
| Pika XC2 | 400–1000 | 447 | P | Yes | HS | € 24.582 | |
| Polytec | Nano | 400–1000 | 270 | P | Yes | HS | € 32.860 |
| Specim | FX10e | 400–1000 | 220 | P | Yes | HS | € 11.690 |
| IQ | 400–1000 | 204 | P | Yes | HS | € 15.950 | |
| PhenoVation | CropObserver | / | / | LP | No | PSII efficiency (Chl-Fl) | € 38.000 |
| Headwall | Hyperspec Fluorescence | 670–780 nm | 2160 | S | Yes | Chl-Fl | € 174.000 |
| Flir | DUO PRO R 336 | 7.5–13.5 µm | / | S,V | Yes | Thermal | € 4.339 |
| DUO PRO R 640 | 7.5–13.5 µm | / | S,V | Yes | Thermal | € 6.342 | |
| A655sc | 7.5–14 µm | / | S, V | Yes | Thermal | € 20.000 | |
| Workswell | WIRIS | Emissivity | / | S, V | Yes | Thermal | € 13.375 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Appeltans, S.; Guerrero, A.; Nawar, S.; Pieters, J.; Mouazen, A.M. Practical Recommendations for Hyperspectral and Thermal Proximal Disease Sensing in Potato and Leek Fields. Remote Sens. 2020, 12, 1939. https://doi.org/10.3390/rs12121939
Appeltans S, Guerrero A, Nawar S, Pieters J, Mouazen AM. Practical Recommendations for Hyperspectral and Thermal Proximal Disease Sensing in Potato and Leek Fields. Remote Sensing. 2020; 12(12):1939. https://doi.org/10.3390/rs12121939
Chicago/Turabian StyleAppeltans, Simon, Angela Guerrero, Said Nawar, Jan Pieters, and Abdul M. Mouazen. 2020. "Practical Recommendations for Hyperspectral and Thermal Proximal Disease Sensing in Potato and Leek Fields" Remote Sensing 12, no. 12: 1939. https://doi.org/10.3390/rs12121939
APA StyleAppeltans, S., Guerrero, A., Nawar, S., Pieters, J., & Mouazen, A. M. (2020). Practical Recommendations for Hyperspectral and Thermal Proximal Disease Sensing in Potato and Leek Fields. Remote Sensing, 12(12), 1939. https://doi.org/10.3390/rs12121939