1. Introduction
Unmanned aerial vehicle (UAV) photogrammetry and remote sensing have become very popular in recent years. UAVs as platforms for support research equipment enable reaching various regions and terrains, often inaccessible to traditional manned solutions. Their trajectory can be remotely controlled by humans or programmed and implemented automatically. The development and operation of commercial unmanned aerial vehicles is rapid and has become very simple owing to their commercialization. Within a short period, scientists and engineers from all over the world noticed these advantages and widely began using these devices to transport research equipment. As a result, engineering measurements and tests started to be conducted in new places with unprecedented frequency.
Commercial UAVs are the machines most commonly used for low-altitude photogrammetry. Their maximum take-off mass (MTOM) is low, typically not exceeding 25 kg, as is their capacity for carrying additional load. This enforces the need to reduce the weight of all components carried by such a vehicle. Miniaturization involves, among others, global navigation satellite system (GNSS) receivers, inertial navigation systems (INSs) and optoelectronic sensors (visible light, thermal imaging, and multispectral cameras), often making these devices less sophisticated and accurate. Unmanned platforms most commonly use single-frequency GNSS receivers, with a positioning accuracy of up to several meters [
1,
2,
3]. Only recently have the engineers started fitting UAVs also with GNSS RTK (Real Time Kinematic) and PPK (Post-Processed kinematic) precise satellite navigation receivers, where the achieved accuracies are already at a level of 0.10 m [
4,
5,
6,
7]. Inertial sensors based on micro electromechanical systems (MEMSs) are used in relation to determining the UAV angular orientation values. The accuracy of determining angular values in inertial units of this type varies around 1° for transverse and longitudinal inclination angles, and 2° for the torsional angle [
8]. Optoelectronic cameras carried by UAVs are small structures based on CMOS (Complementary Metal-Oxide-Semiconductor) sensors, CCDs (charge-coupled devices) or uncooled VOx (Vanadium Oxide) microbolometers, equipped with prime lens with a conical field of view. These are mainly non-metric cameras, where the internal orientation elements are not stable [
9].
The photogrammetric process involves numerous factors impacting the quality of the end result [
10,
11,
12,
13,
14,
15,
16,
17,
18,
19]. In the course of research described herein, they were divided into three groups:
Procedural—All elements of the image and additional data collection process, which originate from the adopted execution method and its correctness. This group contains the parameters of the applied flight plan (altitude, coverage, selected flight path and camera position), GNSS measurement accuracy (RTK), selected time of day, scenery illumination quality, etc.;
Technical—Factors impacting the study quality, arising from the technical parameters of the devices used to collect data. This group contains the parameters and technical capabilities of the cameras, lens, stabilization systems, satellite navigation system receivers, etc.;
Numerical—Factors originating from the methods and algorithms applied for digital data processing.
Maintaining the compilation quality requires good knowledge in the field of the aforementioned elements and their skillful balancing, as well as matching them with encountered measurement condition and faced requirements. If one of these groups remains unchanged (e.g., the technical one), the assumed quality requirements can be maintained by adjusting the parameters of other groups. In other words, with available constant technical resources, it is possible to adjust the numerical methods and procedures so as to achieve the objective. For example, if one has a given UAV with a specific camera and lens (fixed element), it is possible to match the flight altitude to achieve the required ground sampling distance (GSD). Otherwise, when it is impossible to change the flight altitude, which means that the procedural factor is constant, one can use another camera (lens and spatial resolution) or, alternatively, apply numerical methods in order to achieve the required GSD.
With the available constant technical element, the parameters of the procedural and numerical groups are adapted in order to reach the accuracy-related requirements of the outcome. The quality of the study can be significantly improved by properly selecting these elements. Some of them are determined analytically, at the task execution planning stage, e.g., flight altitude, speed, shutter speed, etc., while others are the result of agreed principles and adopted good practices. They primarily result from conducted research and gained experience. The research [
20] presents the impact of significant coverage on the quality of point clouds generated within the photogrammetric process. The paper [
21] discusses the results of experiments involving various flight plans and assesses their impact on the geometric quality of the developed models. The case study [
22] reviews the results of a study originating from air and ground image data. The research [
23] combines point clouds from terrestrial laser scanning (TLS) and ground image data. Similarly, the experiment [
24] utilized the technique of fusing data from aerial laser scanning and optical sensors mounted on a single unmanned aerial platform. The authors of the publication [
25] maximize aircraft performance, and in [
26] put emphasis on flight correctness and proper planning. Several interesting scenarios and recommendations in terms of spatial modelling techniques were thoroughly discussed in [
27].
It should be noted that an appropriate procedure for acquiring photos and its parameters (flight plan and its parameters) must be selected prior to their physical execution. However, there may be cases where the photos had already been taken, do not meet the assumed requirements and it is impossible to repeat the measurement. In general, it can be assumed that two elements impacting the quality of a photogrammetric study are constant, namely procedural, which is the inability to repeat a procedure with other parameters, and technical, which is the inability to change the technical parameters of the used measuring equipment. In such cases, in order to achieve a required study quality, one can apply specific numerical methods. Therefore, the result quality can be improved by using numerical methods. The author of [
28] managed to significantly reduce ground sample distance and increased numbers of points in the dense point cloud using a fixed camera and flight altitude. The papers [
13,
16,
18] review a method for improving the radiometric quality of photos. In [
29], the researchers presented a method to improve the camera’s internal orientation elements and their impact on reconstruction quality. In the work [
30], the results of improving a digital terrain model using the Monte Carlo method were reviewed. The authors of [
31] discuss a thorough impact analysis regarding various feature detectors as well as reconstruction accuracy, whereas the publication [
32] presents a new algorithm for the integration of dense image matching results from multiple stereo pairs.
The data acquisition process may encounter a situation in which blur appears on the images. Deblurring in aviation cameras is achieved by a forward motion compensation system (FMC), and blurring is due to aircraft or satellite forward motion [
33]. For this purpose, analogue cameras have a mobile image plane, which mechanically compensates for the camera’s forward motion [
34]. This compensation is known as time delayed integration (TDI) [
35,
36,
37,
38,
39]. Blur compensation systems require precise synchronization with the vehicle’s navigation systems. Such solutions are not used in small and inexpensive cameras on commercial UAVs.
Image blurring caused by camera motion during exposure significantly impacts the photogrammetric process quality [
40]. On blurred images it is difficult to visually locate ground control points, and the number of identified feature points decreases rapidly together with increasing blur kernel [
26,
41]. Hence, improving a blurred image can increase the number of detected features and, consequently, the geometric quality of generated point clouds and spatial models.
The authors of [
42] divided deblurring methods into two groups, namely blind [
43,
44] and non-blind deconvolutions [
45,
46]. Both solutions are aimed at eliminating blur; however, the non-blind convolutions utilize information on the nature of the blur within an image, hence matching its elimination method. Blind methods do not have such knowledge. A different division is suggested by the authors of [
47], who put them into seven groups, which are edge sharpness analysis, depth of field, blind de-convolution, Bayes discriminant function, non-reference block, lowest directional frequency energy and wavelet-based histogram. Apart from the aforementioned groups, there are also sensor-assisted blur detection [
40,
42,
48,
49] and the latest neural methods [
50,
51,
52,
53,
54,
55,
56,
57,
58,
59,
60,
61,
62,
63,
64,
65].
The methods for eliminating blur formed on aviation images assume that blur is of a linear nature, which is the case most often. This assumption is also adopted by FMC systems. When obtaining data using a UAV, the flight can be performed according to highly varied plans, at varying altitudes and distances to the object, and in different lighting conditions [
66]. For this reason, the nature of blur can be non-uniform, which makes it hard to forecast [
67,
68]. Due to the above, the author of this publication concluded that the neural methods developed in recent years were able to eliminate blur on UAV images with an unpredictable or highly variable blur nature.
This paper presents the following new solutions in the field of photogrammetry and remote sensing:
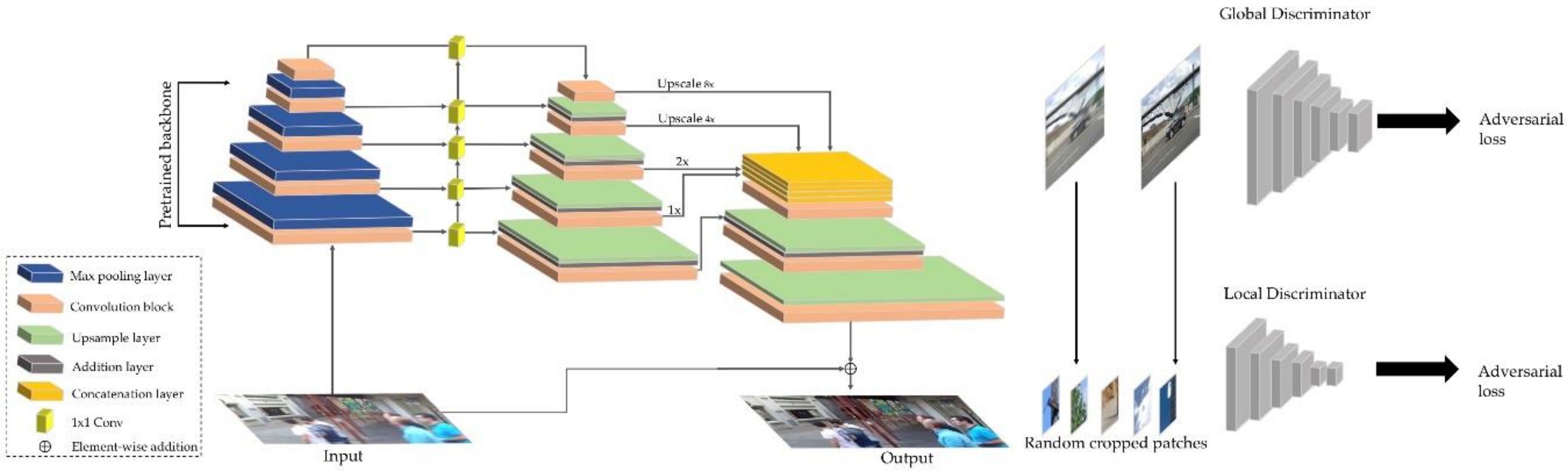
A new, rapid method based on generative adversarial networks (GANs) was applied for deblurring;
A GAN network model was selected and applied, which can be implemented in UAVs and activated in real-time (highly practical significance of the solution);
A set of neural network training data was developed based on real aerial images, collected by the author of the study over the last few years;
More than 20 full sets of photogrammetric products were generated, including point clouds, orthoimages and the digital surface models, from blurred photos and photos subjected to the presented method;
Techniques for improving photogrammetric photo quality were grouped and a tri-element model of a photogrammetric survey quality was presented.
The publication is divided into four sections. The
Section 1 is the Introduction, which presents motivation behind the research. The
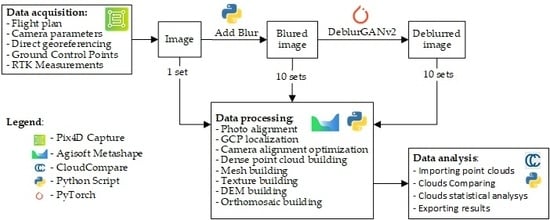
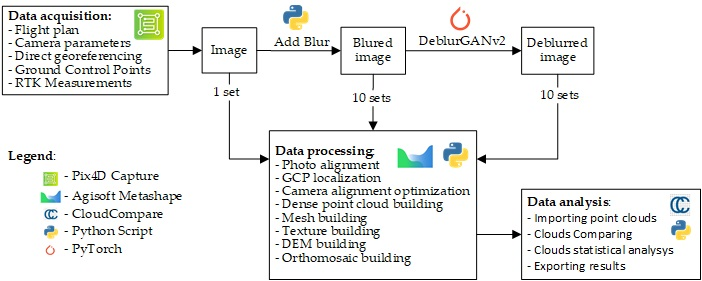
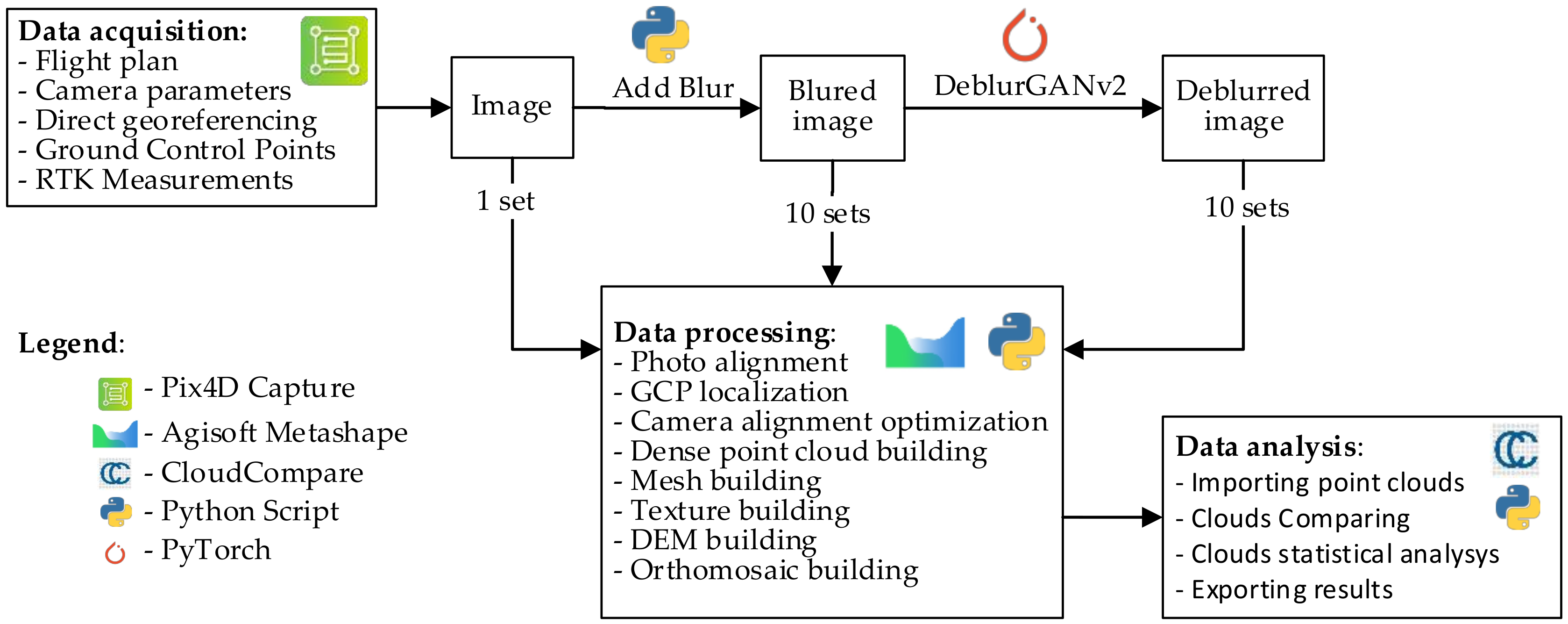
Section 2, Materials and Methods, describes tools and methods used to process the data.
Section 3 presents and discusses the obtained results. The paper ends with the Conclusions, where the most important aspects of the research are discussed and summarized.
3. Results
This chapter presents and analyzes photogrammetric products developed both using blurred photos, as well as their corresponding deblurred photos.
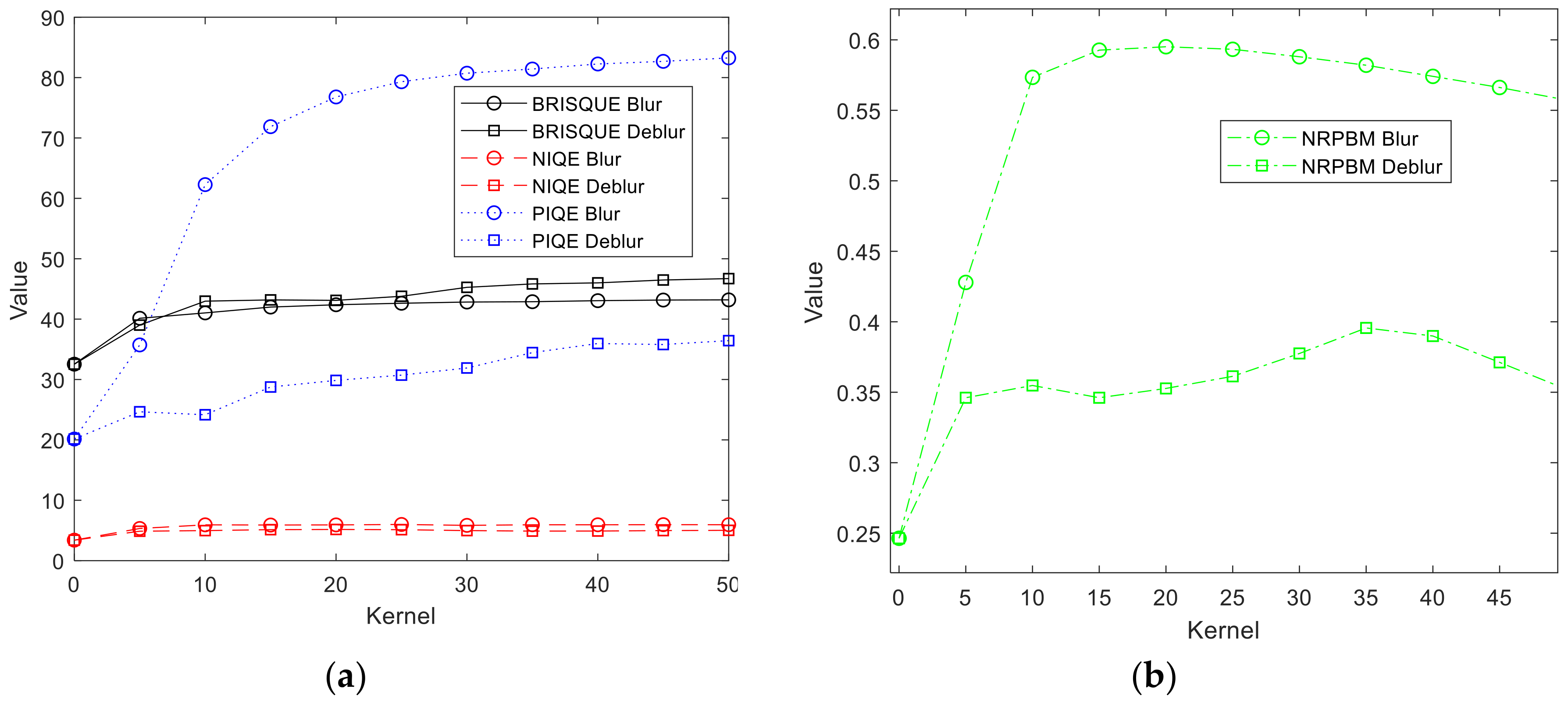
Figure 8 shows a fragment of a developed textured surface model. It should be noted that the texture was generated in each case, and it covered the surface model (mesh) in the right place. The texture quality is responsible for the quality of source photos. The blur visible in the photos is also visible on the surface model. As with the photos themselves, a clear mapping of the borders between sharp edges can be observed. The texture of anthropogenic models is clear, and a significant visual improvement was recorded in this regard. Such conclusions can also be directly derived from the parametric evaluation of the photos in
Figure 6.
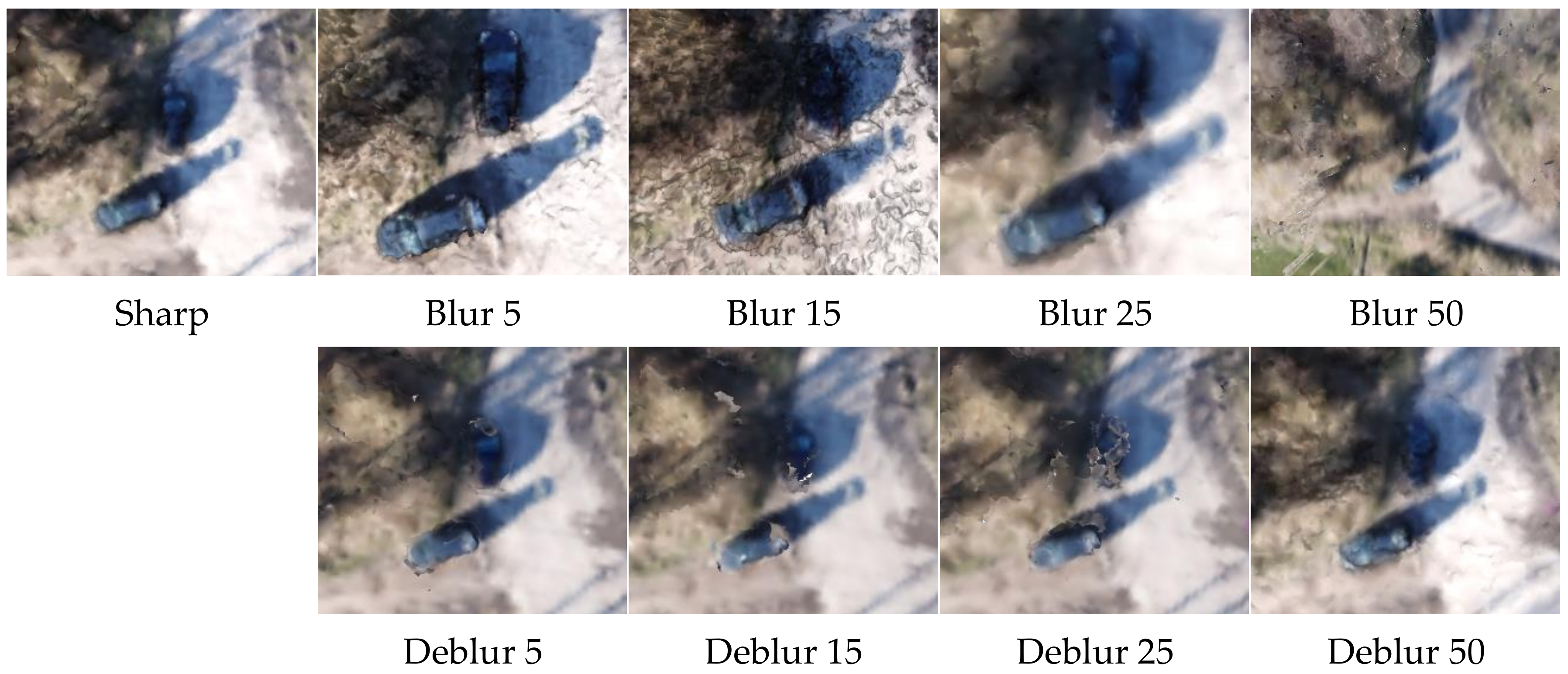
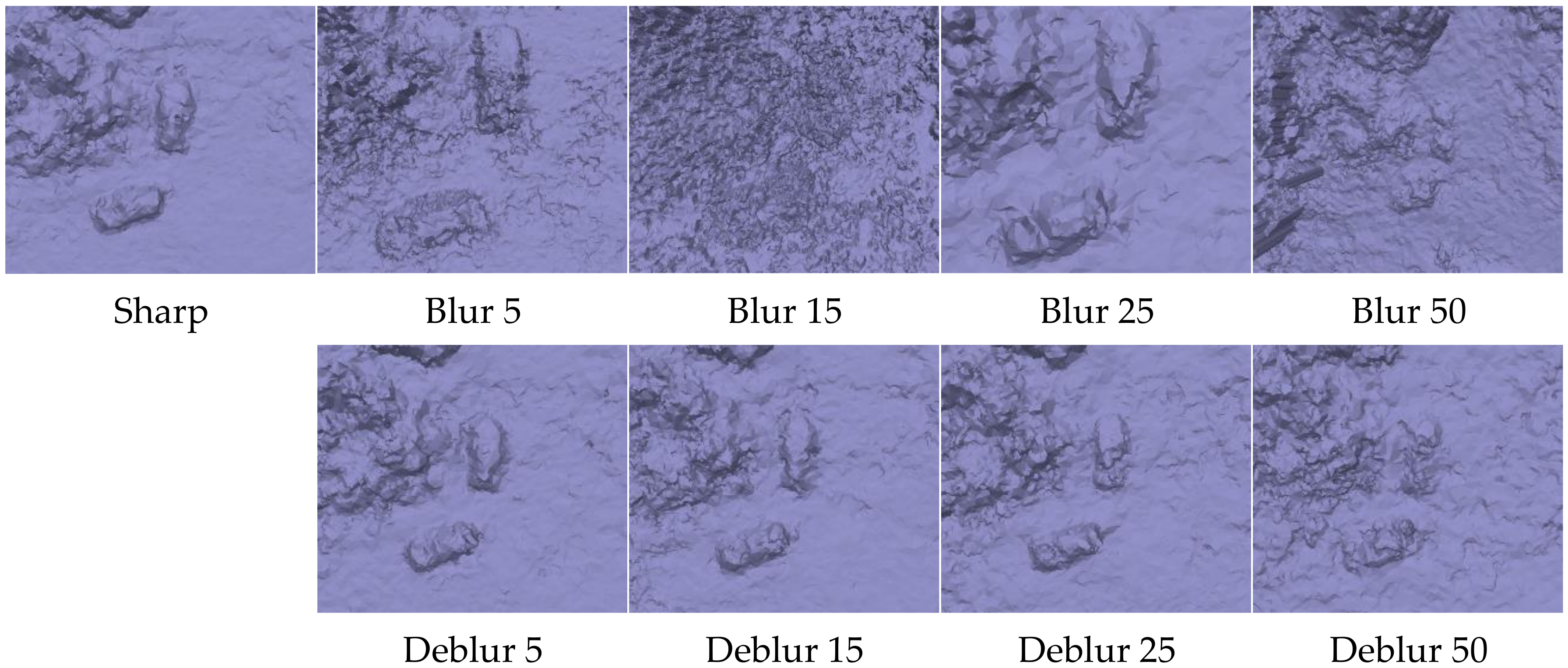
A textured digital surface model does not enable visually assessing the model geometric quality. For this purpose,
Figure 9 shows a digital surface model in a uniform color. First of all, it should be noted that the terrain surface was mapped with geometry in models developed using photos without blur. Cars visible in this fragment have clearly marked edges. In the case of a blurred model, one can notice a lack of model generating correlation and stability, along with a blur kernel increase. For K = 15 and K = 50, the models of smaller objects on the surface are not mapped in practice.
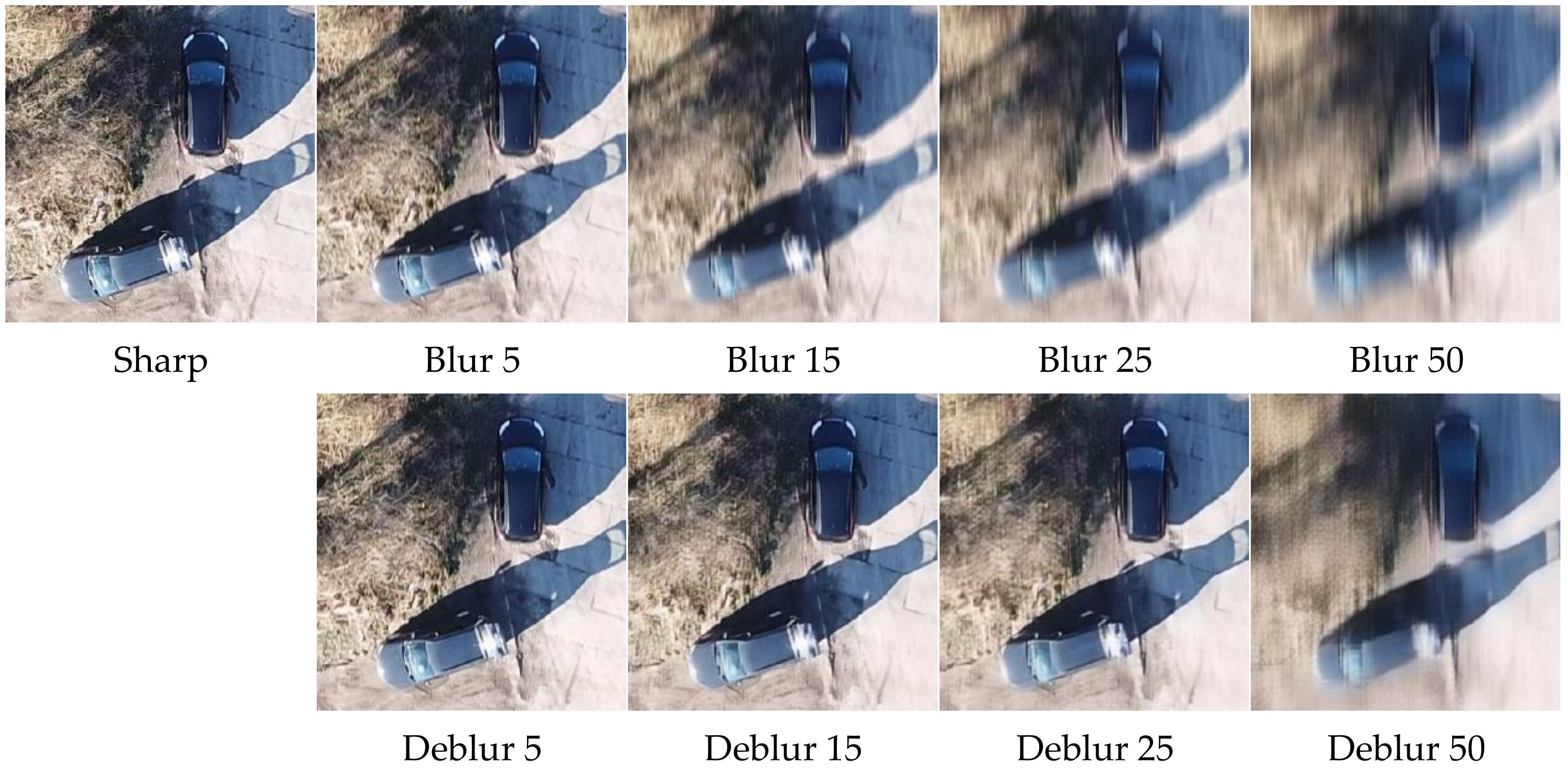
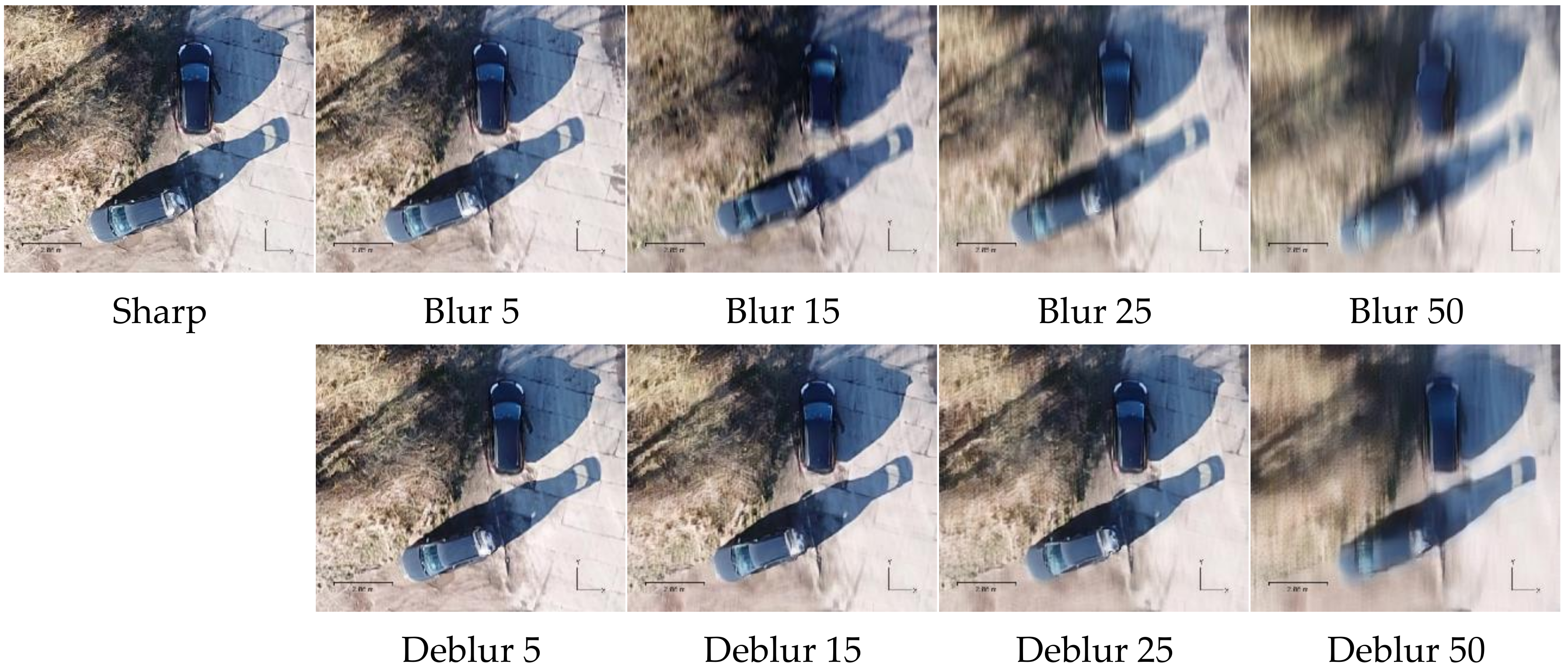
As stated earlier, a significantly improved human perception of the photos is achieved. This allows us to conclude that the interpretive quality of an orthoimage generated using such photos will correlate with the quality of source photographs.
Figure 10 shows fragments of developed orthophotomaps. A clear improvement in the interpretive quality of such a product can be observed in such images. Significantly blurred objects, e.g., due to their motion, are much clearer on an orthophotomap. This proves that enhancing source photos with the DeblurGANv2 methods translated directly to improving the interpretive quality of an orthophotomap.
The geometric quality of developed relief models was evaluated using the methods described in [
30,
97]. An M3C2 distance map (Multiscale Model to Model Cloud Comparison) was developed for each point cloud. The M3C2 distance map computation process utilized 3-D point precision estimates stored in scalar fields. Appropriate scalar fields were selected for both point clouds (referenced and tested) to describe measurement precision in X, Y and Z (sigmaX, sigmaY and sigmaZ). The results for sample blurs are shown in
Figure 11. As can be seen in the presented images, in the case of models based on photos without blur, the distance of a tested model to a reference cloud is stable and there are no significant differences, which is depicted by an even green color over the entire area. In the case of images with blur, as might have been expected, the geometry of the entire surface has been significantly modified. Model deformation, resulting from the systemic errors occurring during aerotriangulation (so-called doming error), increases together with an increasing blur kernel and adopts values of up to 50 m, at the boundaries of the modelled surface.
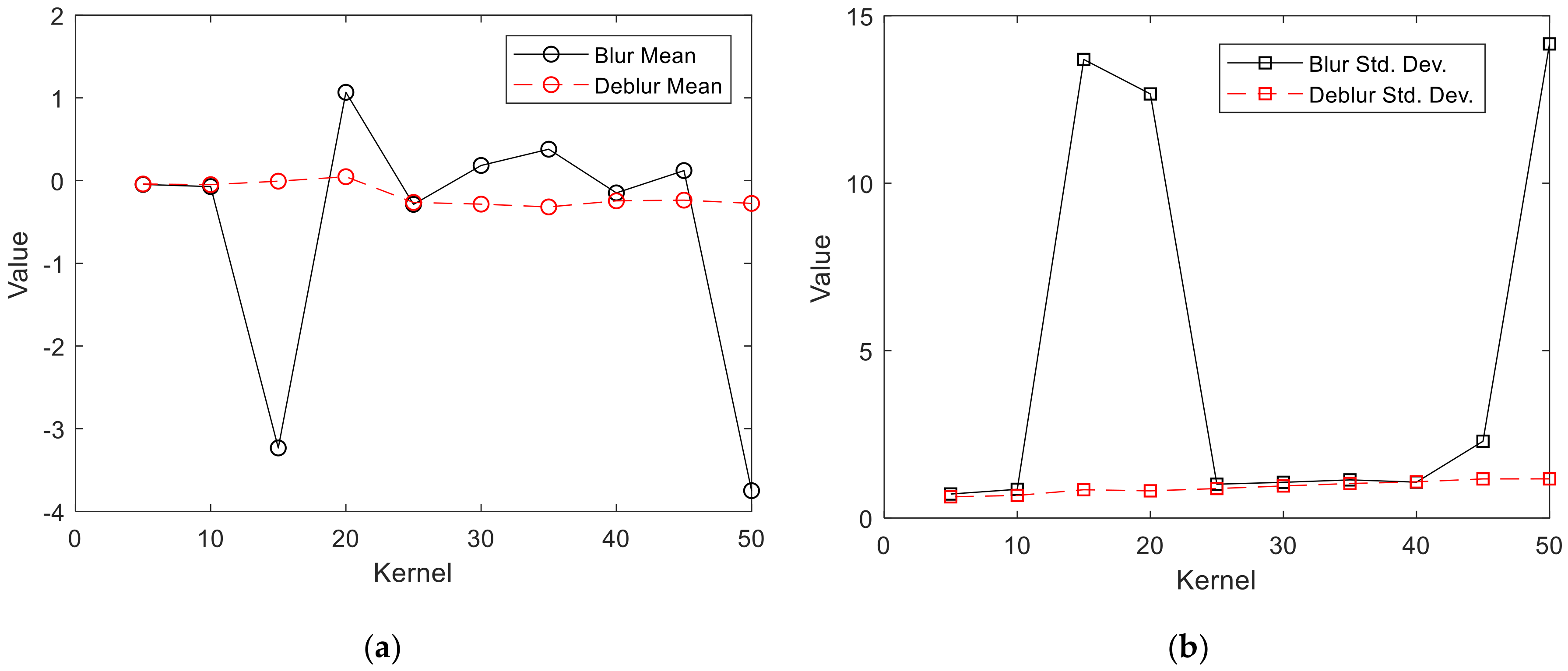
The statistical evaluation of calculated M3C2 distances for all variants was shown in
Table 9 and its graphic form in
Figure 12. The statistical distribution of M3C2 distances is close to normal, which means that a significant part of the observations is concentrated around the mean. The mean and standard deviations for blurred images are not stable and change drastically depending on the blur kernel. The drastic change is observed for 15, 20 and 50 kernels. High stability can be observed for models generated from deblurred photos. The mean varies around zero and the standard deviation grows steadily, to take twice the initial value for the highest blur kernel.
4. Conclusions
The results presented in the previous section show that the method for improving blurred photo quality significantly contributed to an improvement in the general quality of typical photogrammetric products. The model quality can be analyzed in terms of their geometric accuracy and interpretive quality.
The geometric accuracy of the models generated from photos without blur was maintained, which is evidenced by the low means and standard deviation of the compared models. This deviation steadily increases with a growing blur kernel. There was also no significant doming error in these models, which leads to the correct generation of a digital surface model, which preserves severe altitude changes in object edges. As has been shown, object edges in blurred photos fade away at higher blur kernel values. The proposed method enables emphasizing these edges, which consequently retain their geometry.
The interpretive quality of textured products and photos clearly increased. It has been shown, beyond any doubt, that blur reduction significantly improves image perception, and the objects depicted in an orthoimage are clearer. According to the author, this property has great potential for practical application, especially for the reconstruction of highly urbanized places and objects. Blur reduction was higher in image areas with strongly marked non-natural objects (buildings, roads, cars, etc.). This fact largely results from the nature of the photos used for neural network model training. The majority were photos showing fragments of urbanized areas. This property strongly improves the interpretive properties and can be used to develop the maps of urban areas, as well as to extract land cover elements from an orthophotomap.
In the case of the used GCPs (plate with a 30 cm × 30 cm graphic symbol), it was possible to indicate them, even in photos with an initially highest blur. It certainly improved the aerotriangulation outcome and the geometry of the developed models. However, the visibility of these points was not fully maintained, which can constitute grounds to further research of this method. At this point, one can lay a hypothesis that by training networks using photos of similar GCPs or an image of typical GCPs used in photogrammetry, it is possible to enhance and obtain a significant improvement in blur reduction in images showing ground, signaled control points.
The method for improving the quality of blurred photos applied in this research paper has been tested using typical photogrammetric software. Surprisingly, the software turned out to be rather blur resistant and enabled generating models based on all test data, even the ones with the highest blur. It is a fact that the surface of the modelled terrain was deformed; nevertheless, the course of the process of developing a model based on blurred photos was typical. Both the geometric, as well as the interpretive quality of developed photogrammetric models were improved using the neural method for reducing blur, based on generative adversarial networks.
In the conventional photogrammetric process, blurred images are completely unusable. In specific cases, it may turn out that all images have visible blur for the entire photogrammetric flight. This situation means that it is very difficult to locate GCPs, object details and edges are unclear and fading, and images have a weak interpretation quality. The application of the method will eliminate any blurred images and, consequently, it will be possible to use the acquired data for the modelling. In photogrammetric software, which is commonly employed and particularly in their cloud versions, it will be possible to implement an additional feature, which will eliminate unwanted blur. The performance of the method based on neural networks is relatively fast, which means that its application will not significantly slow down the process of building photogrammetric models. Additionally, the application of the method significantly expands the capabilities of the photogrammetric software, due to its universality and independence from the blur character.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}