1. Introduction
A quadcopter drone has provided a significant impact on many applications, including aerial imaging, monitoring, search and rescue, security surveillance, entrepreneurial hobbies, and precision agriculture. However, drone usage has gone out of controlled and abused by some users for nefarious activities such as drug smuggling, conveyance of contraband materials such as weapons [
1] and other significant vulnerabilities [
2], privacy violations, antisocial activities and other unsafe acts [
3]. For example, the few havoc incidents caused by sighted drones in airports and drone misuse became vulnerable and causing global concern.
The threat has cultivated lots of research into systems to detect flying drones for necessary action. One of the early methods was based on an acoustic signal to locate the sound source of a drone [
4]. However, background noise and sound from other sources like vehicles, birds, and others create some difficulty. An attempt to detect a drone based on video imaging involved the object’s appearance and motion cues, as published in [
5]. An object-centric motion was developed to compensate for the changes in the object and the background appearance. This approach can potentially be used for collision avoidance in addition to detection and can, therefore, improve a vision-guided tracking algorithm. However, the system based on image and optical will face difficulty during weather conditions such as rain and snow.
Other works including detecting a drone by listening to the reflected echo of transmitted continuous wireless signals and tracking the radio frequency (RF) transmission between the drone and its controlled point [
6]. Cost-effective off the shelves (COTS) technologies involving wireless fidelity (WIFI) and software-defined radios (SDR) were implemented in the work. The author adopted three stages, i.e., detection, location, and mitigation of the RF communication link. The received signature was matched with the bank of signatures stored, using banded search software. The result seems to be successful, yet some challenges due to the new emerging drones may be faced. The problems may include some complications while operating with the 2.4-GHz industrial, scientific and medical (ISM) band, and some drones do not emit RF signals while operating.
In contrast, the radar system is considered suitable due to its robustness in a day or night, noisy and blurred or misty environments [
7,
8]. However, a drone has peculiar characteristics that makes radar based detection difficult, for example:
A drone has a low radar cross-section (RCS) due to its small size, shape, and construction material;
A drone flying at low speed and erratic flight path is difficult for conventional short-range radar to detect and measure;
A drone flying at low altitude difficult for conventional short/long-range radar, usually 122 m (400ft);
A drone has similar behavior to a bird, making it difficult for classification and recognition.
In an attempt to overcome these disadvantages, this paper proposes a passive FSR by utilizing a signal of opportunity from Digital Video Broadcasting Satellite (DVB-S) to detect a drone, which was briefly introduced in the conference paper [
9]. This paper provides a comprehensive study on digital video broadcasting satellite (DVB-S) based passive FSR (p-FSR), and a numerical analysis on drone blade’s radar cross section, full-scale experiment and result analysis, as well as new signal processing technique to detect a drone, was presented in the previous paper [
10].
The key features to detect the drone in the DVB-S p-FSR rely on the received signal’s Doppler frequency and its micro-Doppler scattered by the drones’ blade. The proposed system will enjoy the advantages of:
High RCS in the main lobe of forward-scatter region. Unlike normal radar, target RCS in FSR is practically independent of the radar absorbing material (RAM) coating, which means it can detect drone with stealth capability;
Long coherent intervals due to a low drone speed providing a high resolution (∆fFS = 1/∆TFS). This makes it capable of using inverse shadow synthetic aperture for automatic classification/recognition;
The integration of FSR into passive mode will make the proposed system covert and possibly low cost as there is no need to develop a dedicated transmitter;
The leakage/direct signal, which is ‘unwanted’ in conventional passive bistatic radar, is good for FSR for target detection due to direct signal perturbation;
DVB-S is known to have 24 h signal availability and a large coverage footprint. Thus, the system will have good coverage.
Micro-Doppler is a vital feature that resulted from an additional frequency modulation generated from the rotation of the drone’s blade. Detecting micro-Doppler is quite challenging due to its non-constant nature, mainly that the drone is engaged in multiple modes while flying. Because of the non-stationary and non-linear nature of the drone motion, the micro-Doppler became a time-varying component, thus traditional time frequency-processing techniques are non-optimal to extract micro-Doppler. For this reason, an improved signal processing technique is proposed based on empirical mode decomposition (EMD), to extract the unique feature vector from the received signal.
The paper is organized as follows:
Section 2 is comprised of the materials and methods, which present the trend of implementation level and the achievement made in drone detection. It also describes the RCS characteristics of a drone’s blade, especially at the forward-scattering radar. Then, the section presents the proposed DVB-S passive FSR system setup, experimental campaign and signal-processing techniques.
Section 3 presents the experimental result including vector extraction by EMD and drone detection. A discussion on the results and the performance of the system proceeds after each results presentation.
Section 4 concludes the paper and provides a summary of the work, hence, highlights an area of further study.
2. Materials and Methods
Several illuminators explored for passive bistatic radar (only one example of a published paper is cited for each technology) such as the global navigation satellite system (GNSS) [
11], Long-Term Evolution (LTE) signal [
12], WIFI [
13], WIFI (DVB-T) [
14], Digital Audio Broadcast (DAB) [
15], FM broadcast [
16], drone RF signal [
17], video surveillance [
18]. These illuminators became a boosting tool for passive radar, thereby becoming an important technology for both military and civil applications.
Table 1 highlights some of the issues for the abovementioned potential signals.
Many passive FSR approaches, other than DVB-S-based, addressed issues on airborne targets such as RCS verification of different aircraft in [
19], detection and classification of helicopters in [
20], a feasibility for PFSR implementation in [
21,
22,
23]. Signal characterization and optimization was also presented in [
24,
25] to improve the detectability of airborne targets. A GNSS signal was further used in [
26] to present a signal model and experimental validation of a SISAR image of detected aircraft.
Signal from DVB-S was also explored as an illuminator of opportunity for both ground and airborne target detection. For example, Tsao et al. [
27] and Griffiths et al. [
28] performed an analysis of the DVB-S signal waveform for radar application. Griffiths et al. [
28] used a flat plate reflector within a close range to establish some detection using the system. Another feasibility study involving a simulated signal model and some experimental results was presented in [
29,
30]. Nevertheless, some unresolved challenges identified envisaged the derailing factor of DVB-S implementation for high-altitude targets, and the difficulty experienced while maintaining the effective detection range for small RCS targets is an issue of concern [
31,
32]. Consequently, it derails the use of DVB-S-based systems for airborne target detection including the drone.
Some works integrating FSR into a satellite-based system could be found in [
33,
34]. A shuttle orbiter surveillance was one of the achievements recorded using a geostationary satellite [
33]. Additionally, paper [
34] describes an optimized system performance by implementing the DVB-S signal into FSR geometry to estimate aircraft velocity. These two (2) papers mark early work on satellite-based passive FSR system for air surveillance. To summarize,
Table 2 presented the pros and cons of the DVB-S-based radars so far reported.
Based on our awareness and, referencing
Table 2, it is worth noting that the reported literature addressing quadcopter drone detection and its micro-Doppler features extraction by using the DVB-S-based passive FSR system was not yet explored or reported. To complement the knowledge, this paper implemented a passive FSR for drone detection and micro-Doppler feature extraction. It utilizes a signal of opportunity transmitted from a DVB-S (Malaysian satellite Measat3) with the satellite specification presented in
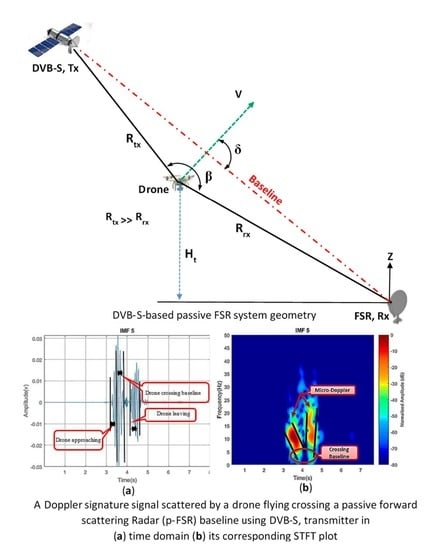
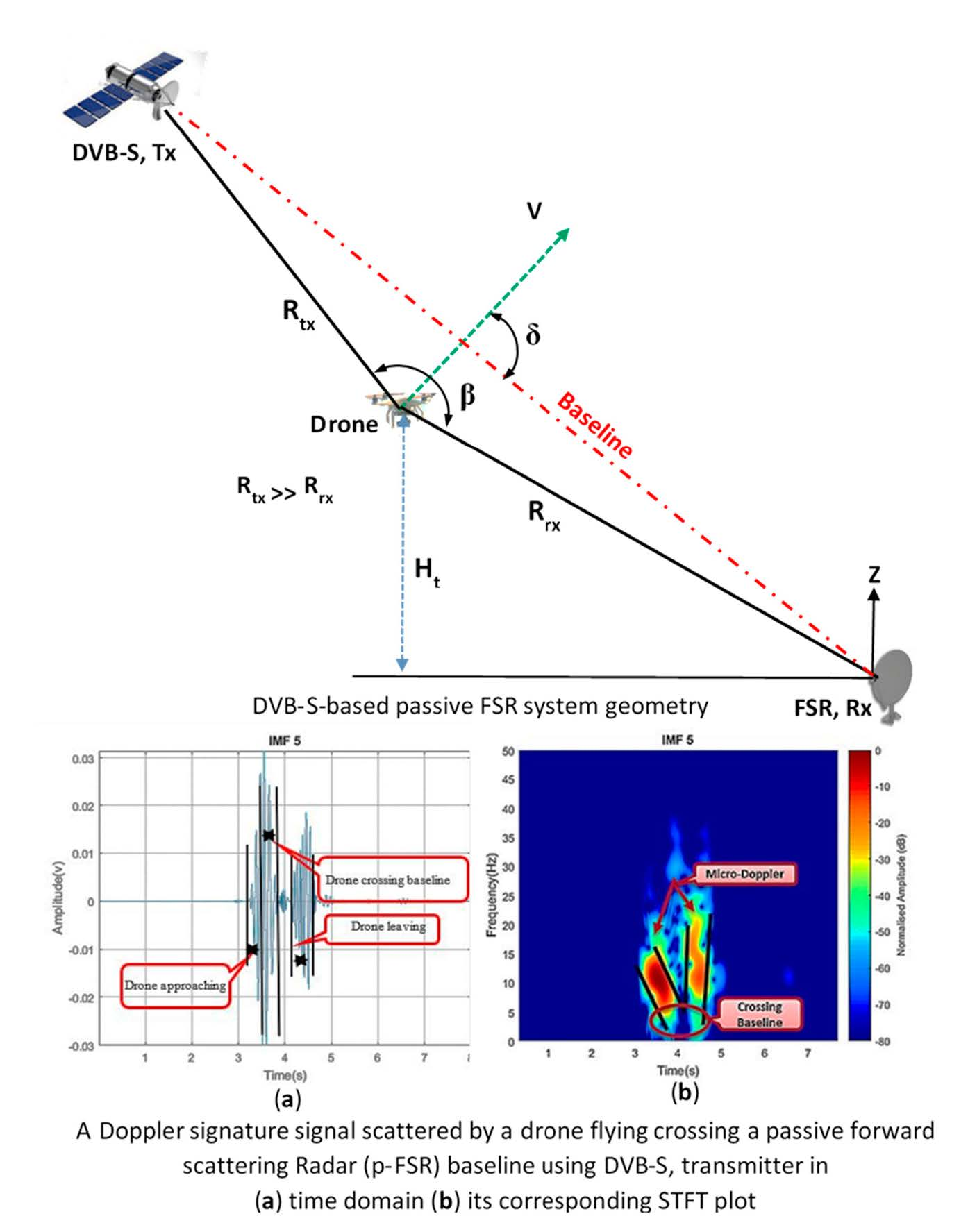
Table 3. The proposed DVB-S-based passive FSR system geometry is illustrated in
Figure 1. This paper only focuses on the detection of the drone by utilizing the extracted micro-Doppler feature as the stronghold for the detection based on the established signature of the drone from our findings, as published in [
10].
2.1. Radar Cross Section (RCS) of the Drone’s Blade
This section investigates the forward-scattering radar cross section (FS RCS) for the different materials that are used to fabricate the drone’s blade at various plane wave incident angles, φ. The paper assumes the drone could fly in three different directions while crossing the satellite–ground station FS baseline, which are cruising horizontally, flying vertically and flying sideways. All the positions will affect the electromagnetic signal illuminating the drone and, thus, its FS RCS. The EM simulation of the drone blade was conducted by using a computer simulation technology (CST) on a commercial DJI Phantom drone’s blade.
The two different blade materials considered were i. perfect electrical conductor (PEC) and ii. plastic, where most of the drone’s blade was made by these materials. The size of the blade follows the typical size of the commercial Phantom drone’s blade model. Theoretically, parameters influencing the RCS performance include the target physical geometry, material, target external features, radar transmitting frequency, plane wave incident angle, φ and the bistatic angle (β) [
36].
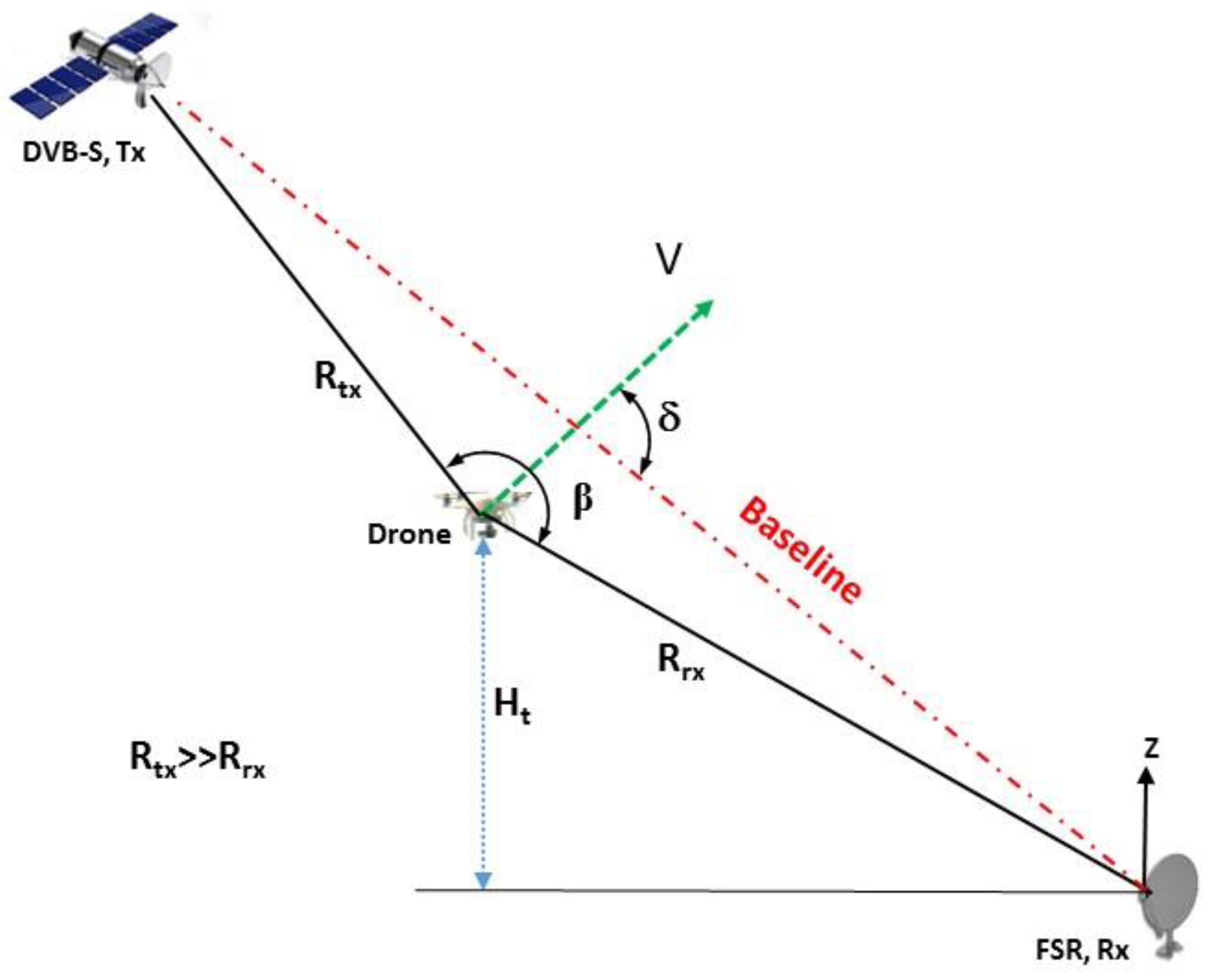
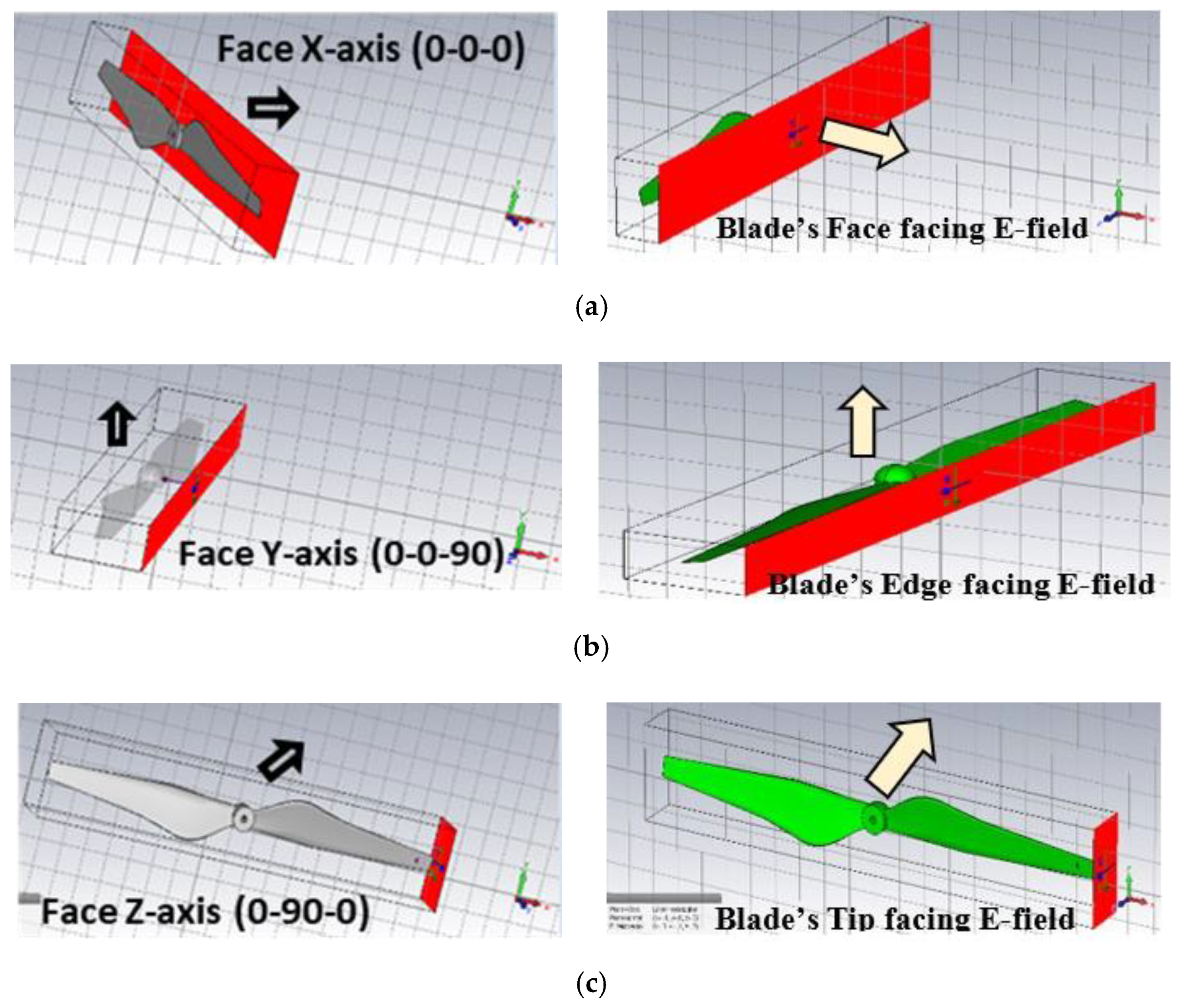
Figure 2 illustrates the blade orientations towards the E-field direction. The blade orientation was defined by their positions in XYZ coordinates. For this case, a linear polarization plane wave with plane normal (x = −1, y = 0, z = 0) and electrical field vector (x = 0, y = −1, z = 0) was used to transform the blade orientation. The blade was positioned along the x-axis for the E-field to be in the direction of the “blade-face”, as in
Figure 2a.
The blade was then rotated 90° along the z-axis for the blade to face-up for the “blade-edge” faced the E-field direction, as in
Figure 2b, and also rotated another 90° along the y-axis for the “blade-tip” to face the direction of E-field, as in
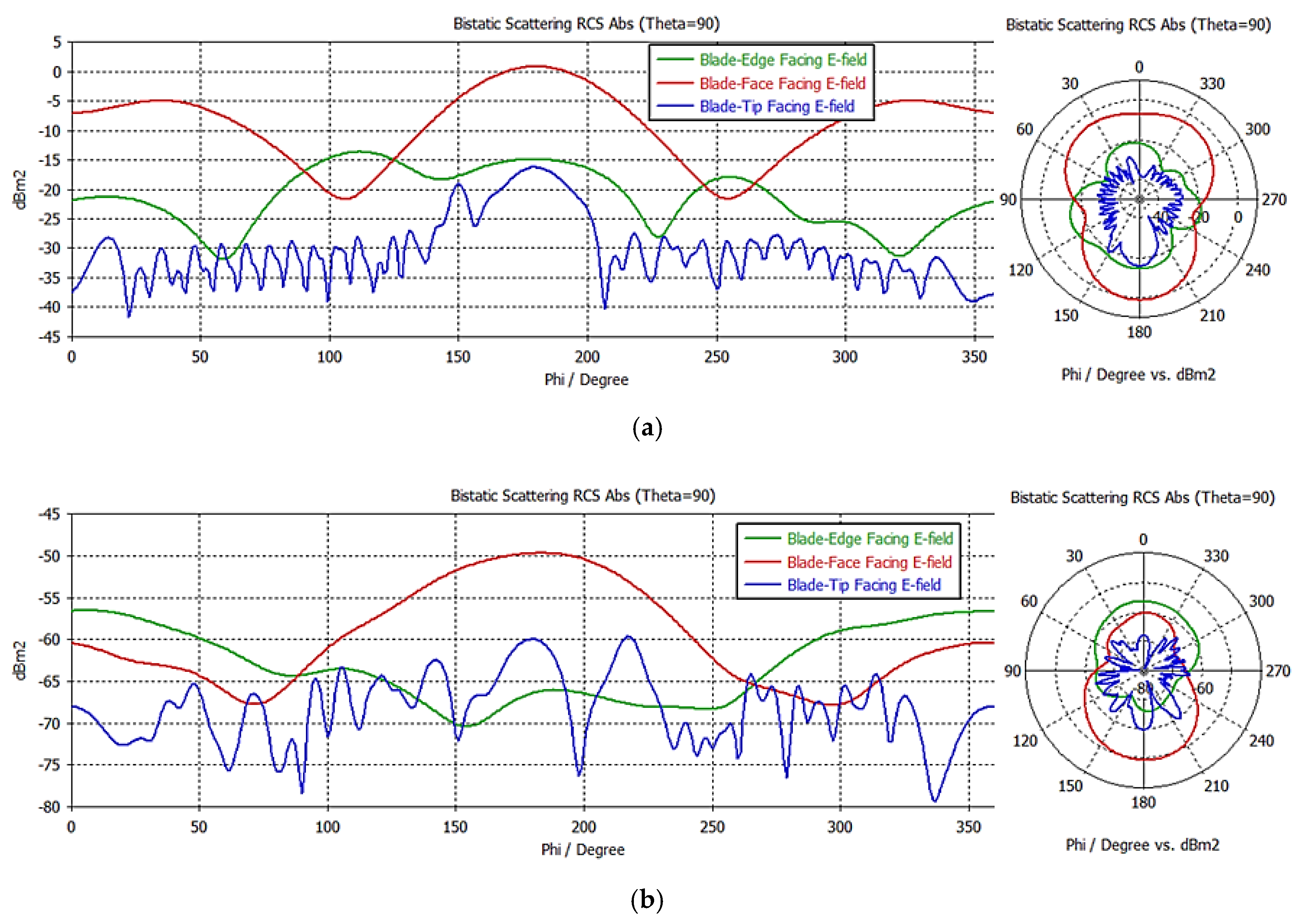
Figure 2c. The RCS representation on the Cartesian and Polar coordinates for both materials and the three different blade orientations are illustrated in
Figure 3.
From
Figure 3, the bistatic RCS was appreciable at the FS mode (φ = 180°) irrespective of the material and the orientation of the blades. This further revealed the RCS enhancement capability of the FSR geometry, which, in turn, may improve the performance of the system. In summary,
Table 4 presents the magnitude and direction of the RCS main lobe and other essential parameters achieved.
It describes that the PEC material, with the blade face facing the E-field direction at a Centre frequency of 11.725 GHz, yields the highest bistatic RCS of 0.877 dBm2. Similarly, for the plastic materials, the highest RCS value is −49.7 dBm2 at 183° of the main lobe’s direction. A similar effect will be expected to be achieved during the detection due to the direction of illumination of the DVB-S signal to the normal flying drone. The look angle is expected to be in the direction of the blade face.
2.2. DVB-S Passive FSR Experimental Campaign for Drone Detection
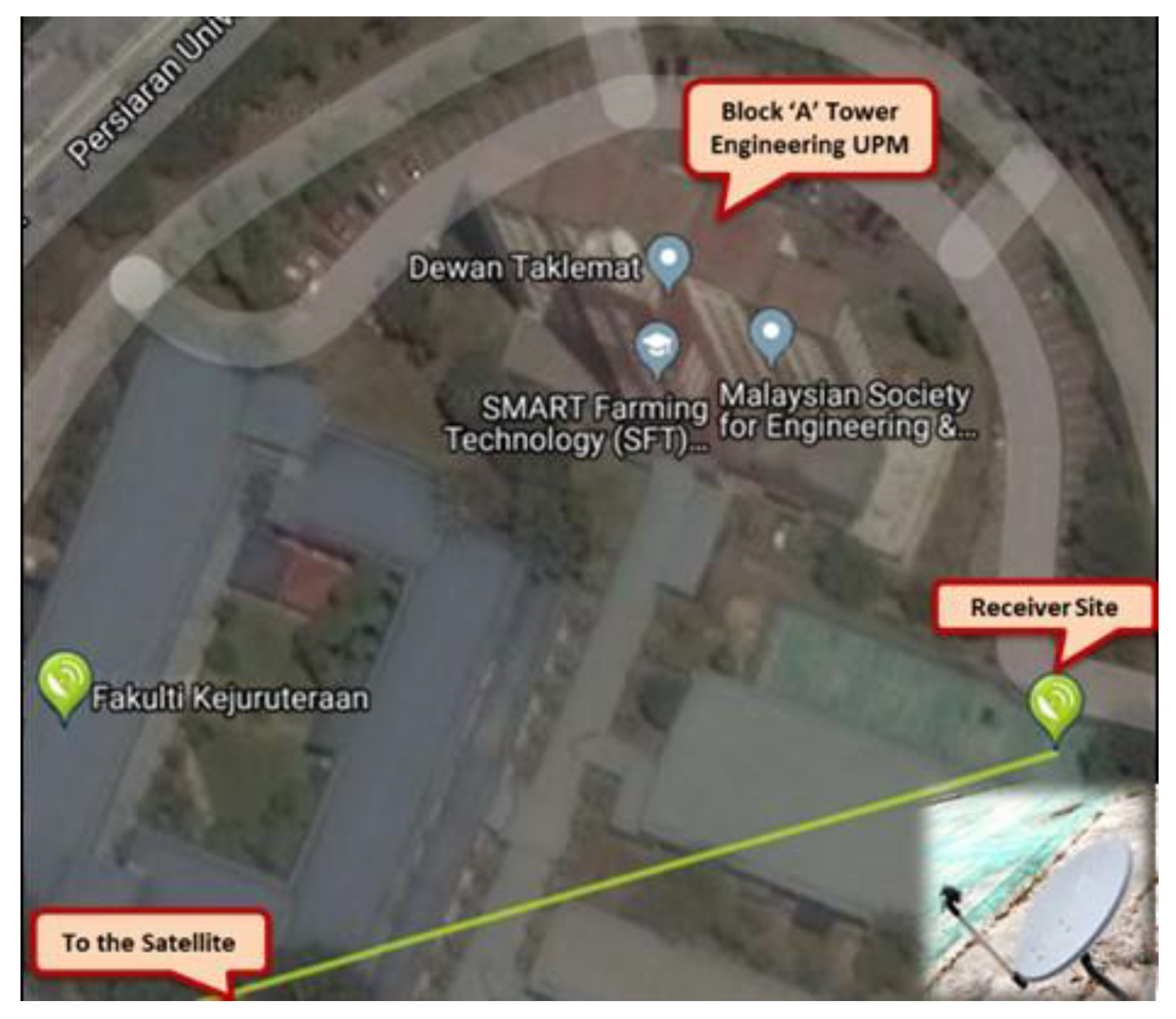
The experiment was conducted in an open area (futsal court), at the Faculty of Engineering, University Putra Malaysia (UPM). A geostationary earth orbit (GEO), DVB-S satellite located at 91.5E, 35,921 km above the sea level was used as the illuminator of opportunity and served as the transmitter.
Figure 4 illustrates the aerial view of the experimental site. The FSR topology enables the receiver to receive a signal component of both scattered and the direct signal from the transmitter (signal source), and maintained the general bistatic Doppler frequency equation, as shown in (1) [
36]
where
v = moving target velocity, [
] is the coefficient factors due to bistatic geometry, δ is the angle between the velocity direction FS baseline, and
is the wavelength. For simplicity, the baseline formation between the satellite and the receiver is assumed to have their main lobe be in the same direction.
The FSR receiver circuit is considered simple and comprises of a customized low noise block (LNB) installed attached to the dish antenna. The feed horn is located at the dish’s focal point to receive the focused reflected energy by the dish. The down conversion process begins from the output of the waveguide probe passing through a Ku-band pass filter to remove the unwanted frequencies. Due to the low power signal received, an LNA was made to amplify the signal power to meet the sensitivity level of the amplitude detector and then passes through a low-pass filter. The LPF output is converted to digital form by an analogue to digital converter (ADC) and saved for signal processing. The block diagram of the DVB-S p-FSR receiver is illustrated in
Figure 5.
The signal under consideration had an approximate calculated power received of −110 dBm. This signal power was considered low, but sufficient to be utilized by the FSR system; nevertheless, the system further amplified the signal before the non-linear device process. An LNA with a 20-dB gain and a noise figure of 2 dB, with an output capability of up to +25 dBm, was used within Ku-band frequencies. The LNA improved the signal power to the required level for a successful down-conversion process and ensured that the signal power was higher than the diode sensitivity level.
The complete passive FSR system was set up to capture the Measat3 signal waveform. The high gain of the LNA amplified the signal power, and the Measat3 signal waveform was acquired by using a high-definition ADC. In total, 22 transponders by the Measat3 satellite were received. Although multiple transponders can be received at the same time, the transponder having the highest power received was assumed to be utilized in the detection of the target, with little or no Doppler contribution from other channels. The multiple-frequency channels received can also be used to improve the SNR of the received signal, as suggested by [
33].
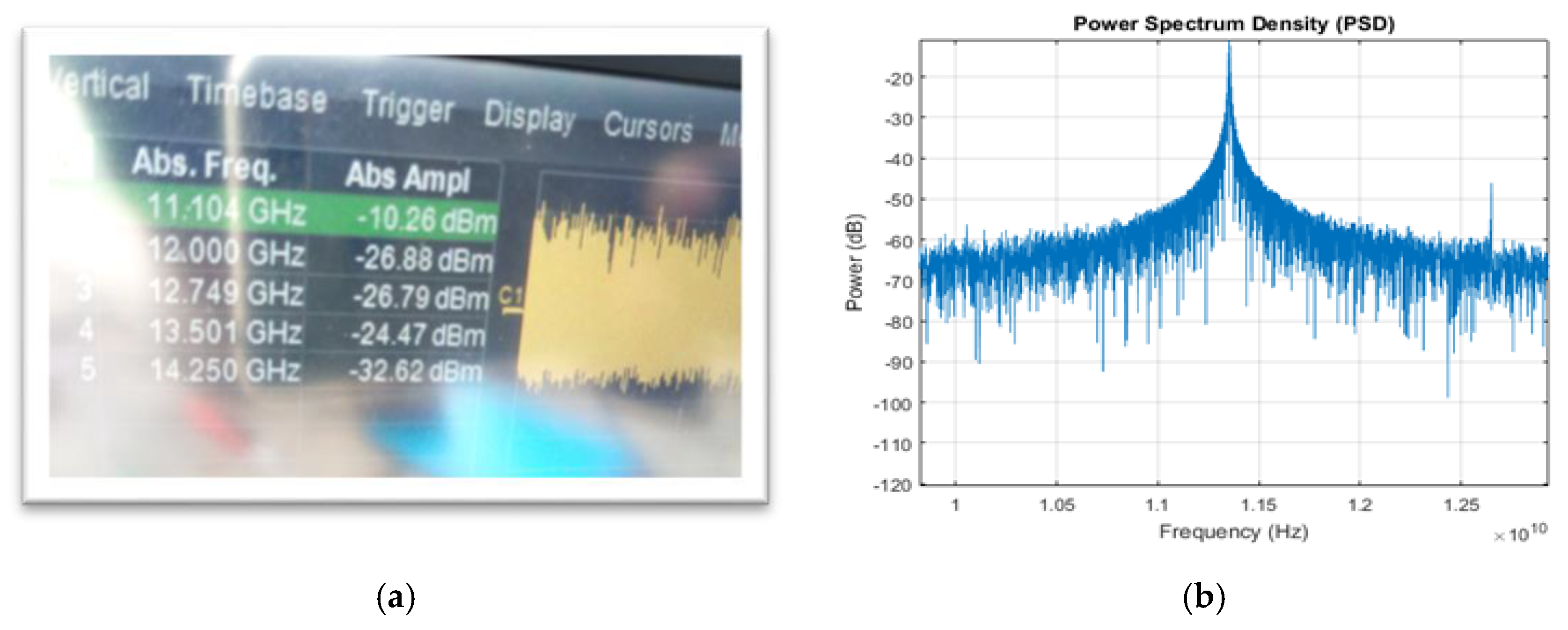
The actual Measat3 signal spectrum of the transponder with the highest power was illustrated in
Figure 6. One of the channels received 11.104 GHz and it was the highest power received with −10.26 dBm.
Table 5 illustrates all signals received in the order of their power. As indicated in
Table 4, the other two channels, 12 and 12.749 GHz, are still within our operating frequencies with −26.88 and −26.79 dBm, respectively.
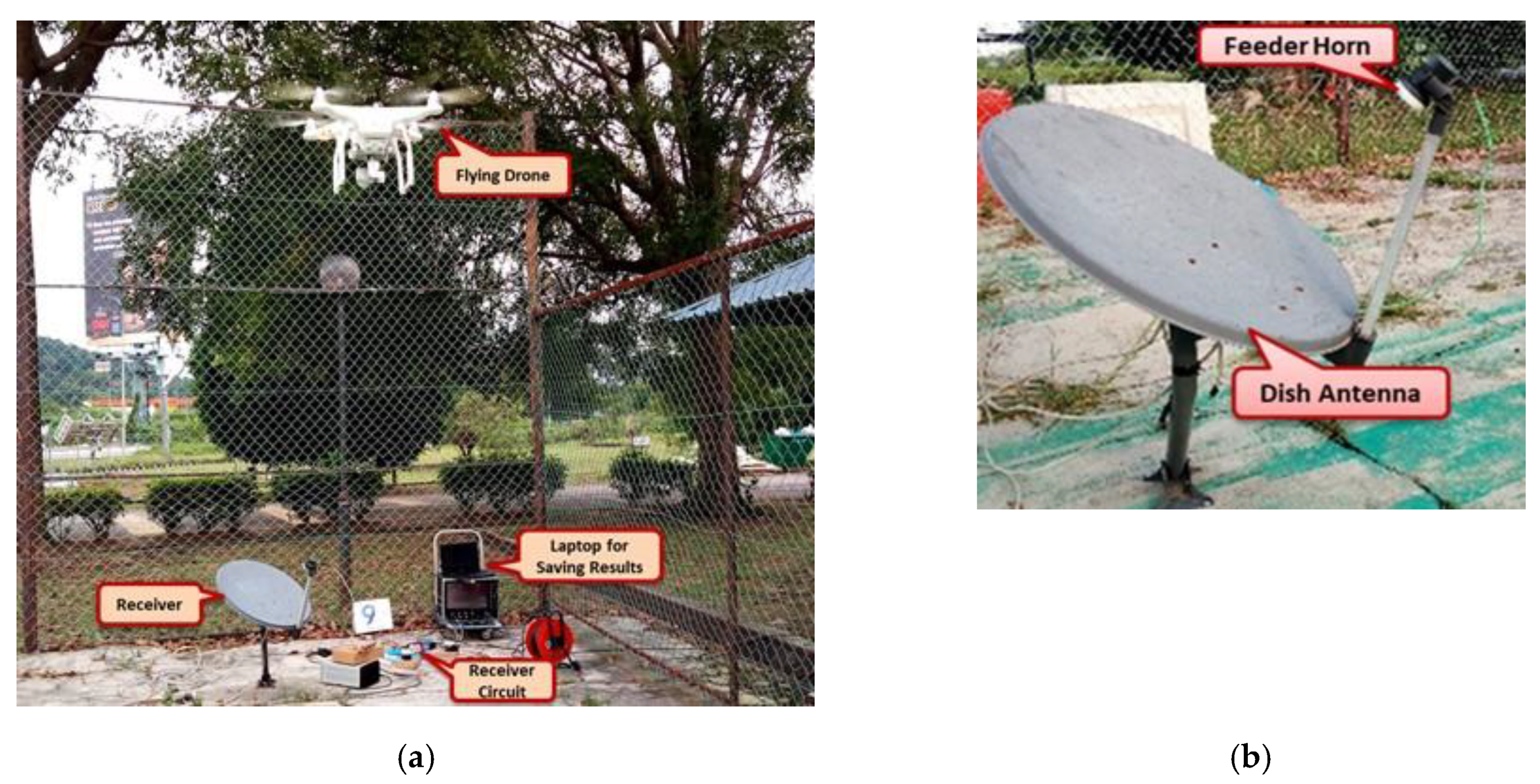
Figure 7 shows the experimental setup of the receiver including the parabolic dish antenna. A parabolic dish antenna was placed to point towards the satellite direction and was located at the end of the futsal court to enable the drone to have enough flying space. Our best efforts were made to decide the baseline between the satellite and the parabolic dish antenna, despite the transmission nature of the DVB-S signal which is circularly polarized. The receiving system parameters are depicted in
Table 6. A commercial quadcopter drone was used during the experiment as a target of interest.
The detection procedure is described in
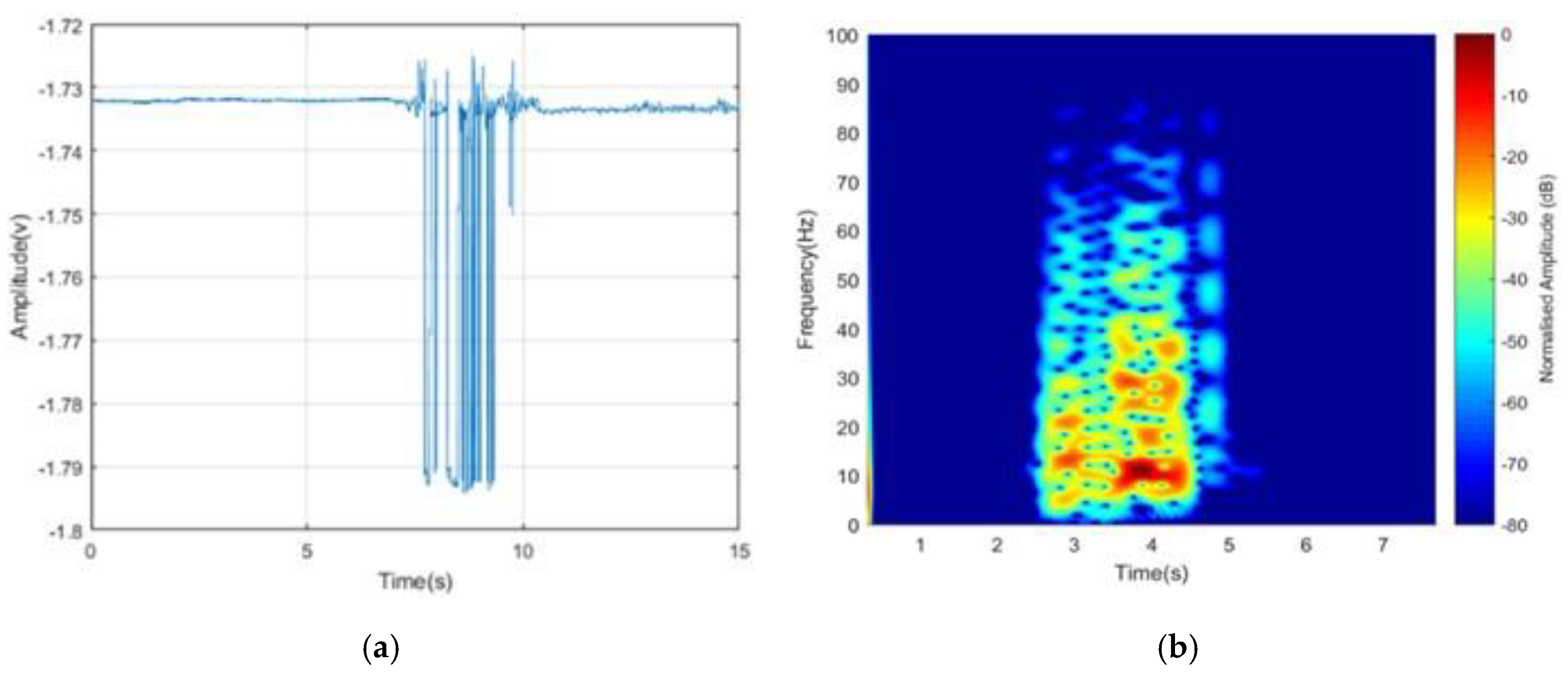
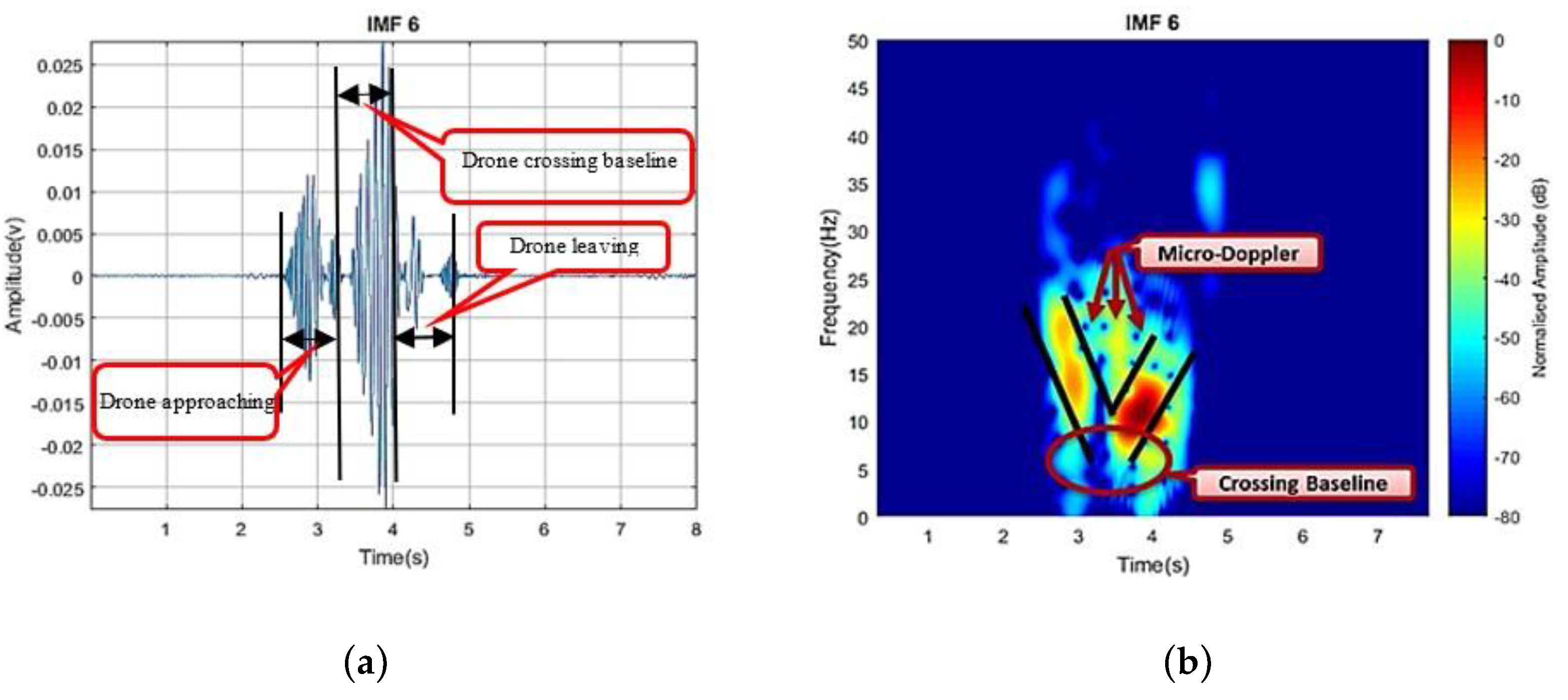
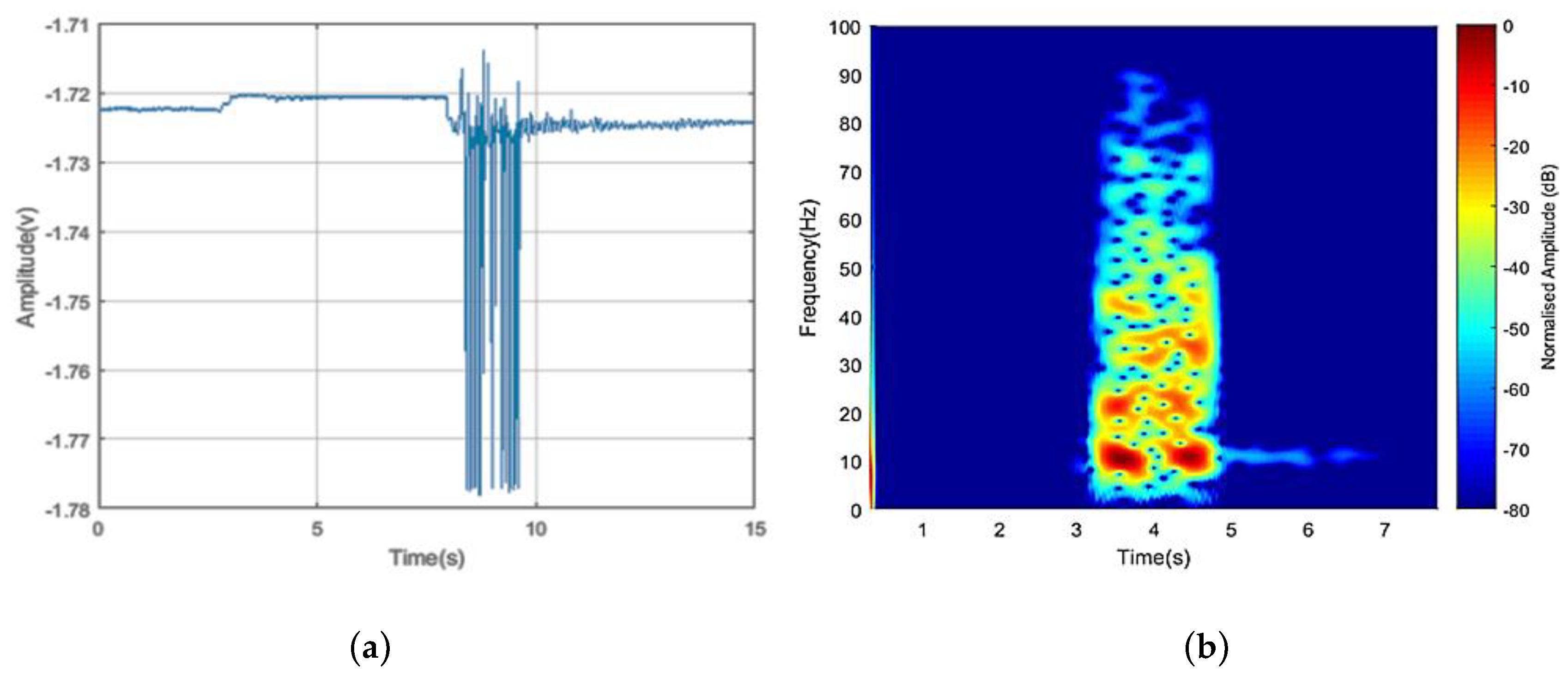
Figure 8, which includes target detection from a disrupted continuous time domain signal; then, the micro-Doppler will be extracted from the signal before drone detection. The sampling frequency of ADC was set to 50 kHz and is sufficient for the expected maximum Doppler value of the rotating blades. Additionally, the FS receiver just needs to capture the modulation caused by the moving target and does not need to reconstruct the signal from the satellite. The received signal is represented in the joint time-frequency domain by STFT with a hamming window. The drone was set to fly horizontally crossing the FS satellite receiver ground station. To analyze the effectiveness of the system, two signals acquired at a different time (namely Signals 1 and 2) are analyzed in detail.
2.3. Empirical Mode Decomposition (EMD)
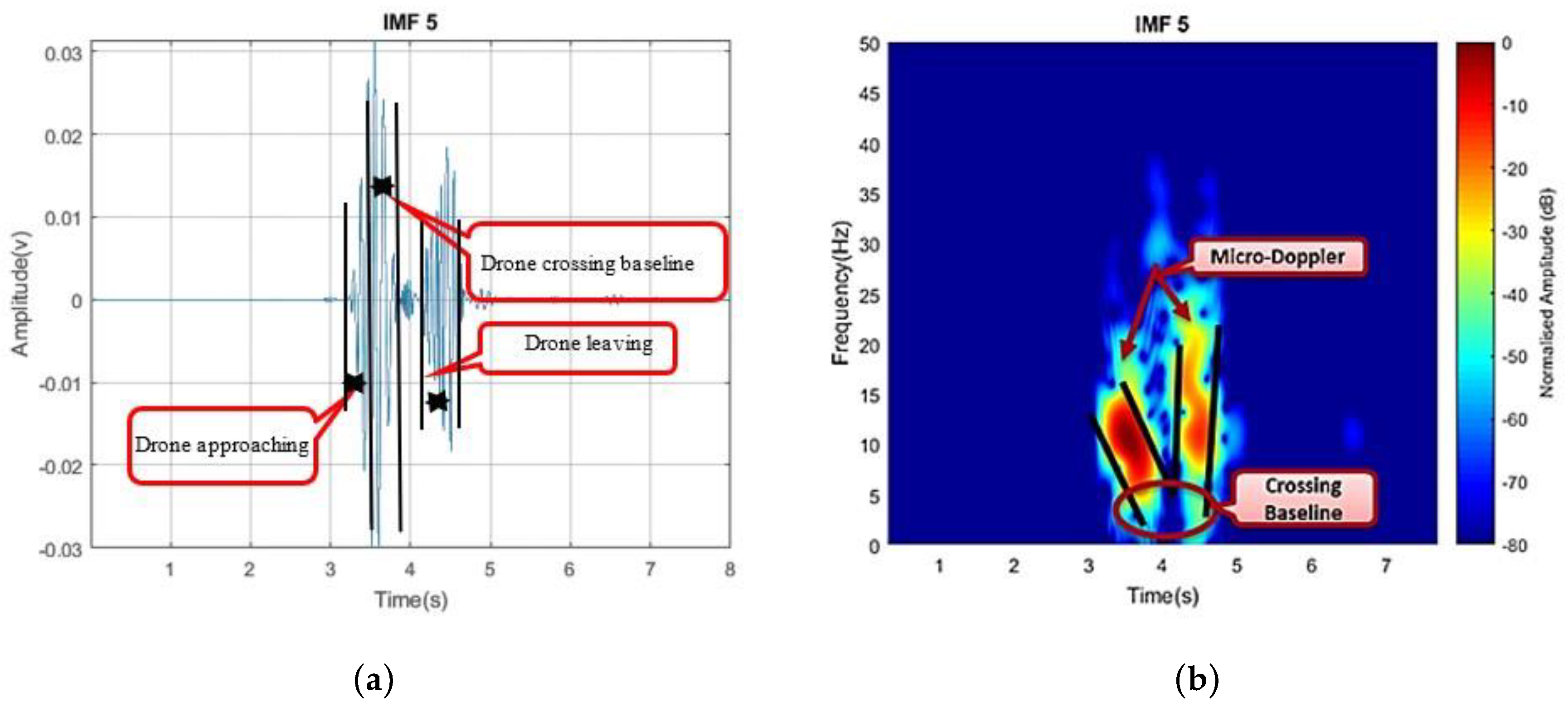
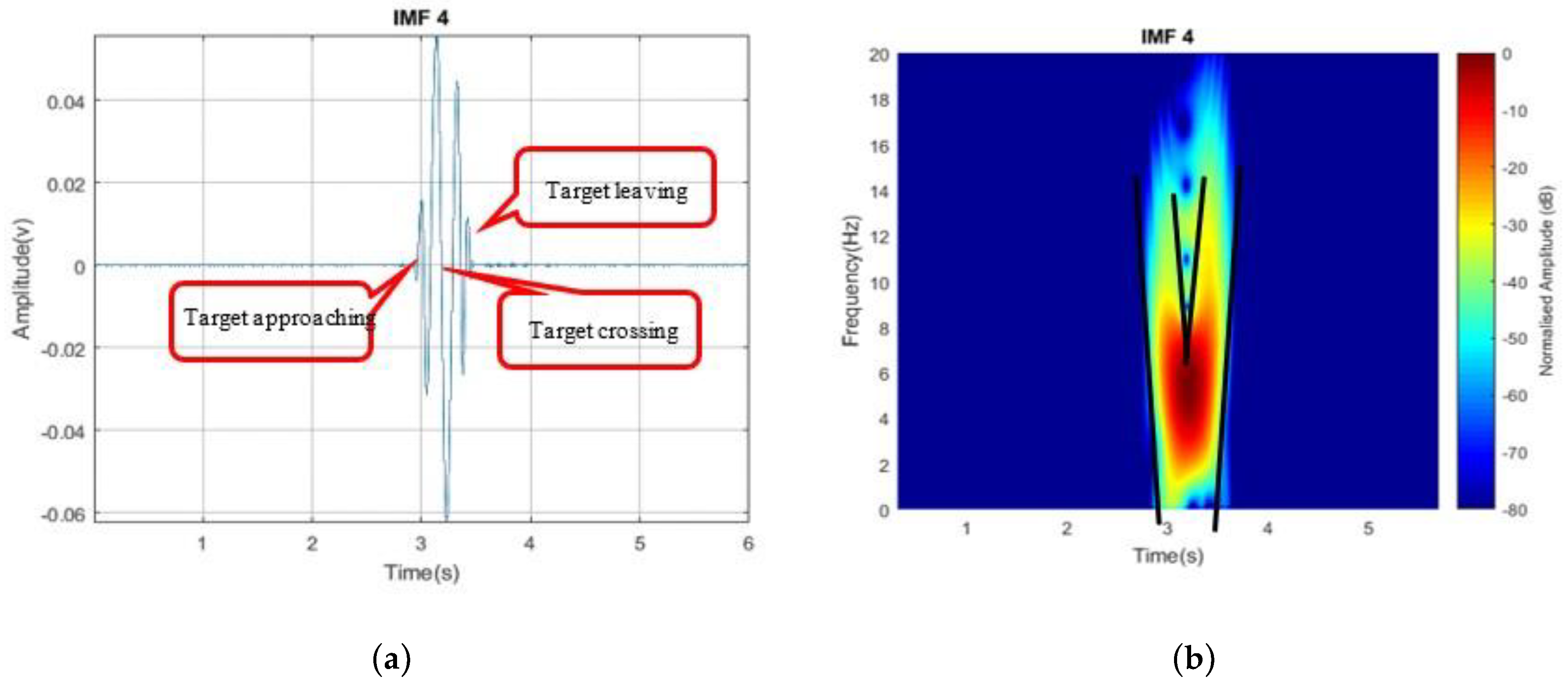
In this section, we considered the extraction of some feature vectors from the original signature of the detected target by using the Empirical Mode Decomposition (EMD) technique. We aimed to use the extracted vectors as a stronghold for identifying the detected drone in FS-mode, based on the peculiar signature of a Doppler pattern with V-shape characteristics (towards zero Doppler on the center of baseline) and micro-Doppler surrounding the main Doppler, as proved in [
10], thus confirming the possibility of using the DVB-S-based passive FSR system for low-profile target detection. These features may further be used in the identification of this target among other targets in the same bandwidth or surveillance volume, like flying birds (as this constituted our future works). The most robust feature of concern is the micro-motion based on the four-rotor rotating blades which, of course, differs from the micro motions due to flapping birds. This may further classify the target from other similar copter drones or a fixed-wing drone, in addition to a reduction of dimensionality in classification problems [
37]. Several methods can be used in extracting the feature of a target; the most common and reliable methods include using STFT, singular value decomposition (SVM) [
38,
39], and empirical mode decomposition (EMD) [
40], among others.
For a target with constant speed, it is assumed that the resultant Doppler frequency shift will also be constant [
35]. In reality, a target like a drone does not maintain constant velocity while moving, and neither does the rotating blade. This makes the micro-Doppler analysis become challenging due to the non-linear and non-stationary characteristics of the signal. This non-linear and non-stationary signal make other signal processing techniques like STFT (which assumed linearity and stationary nature) non-optimal; hence, making the empirical mode decomposition (EMD) a good candidate for this analysis of the time-varying Doppler frequency shift. An advantage of EMD was that it does not require pre-defined kernel functions or prior knowledge of the signal behavior.
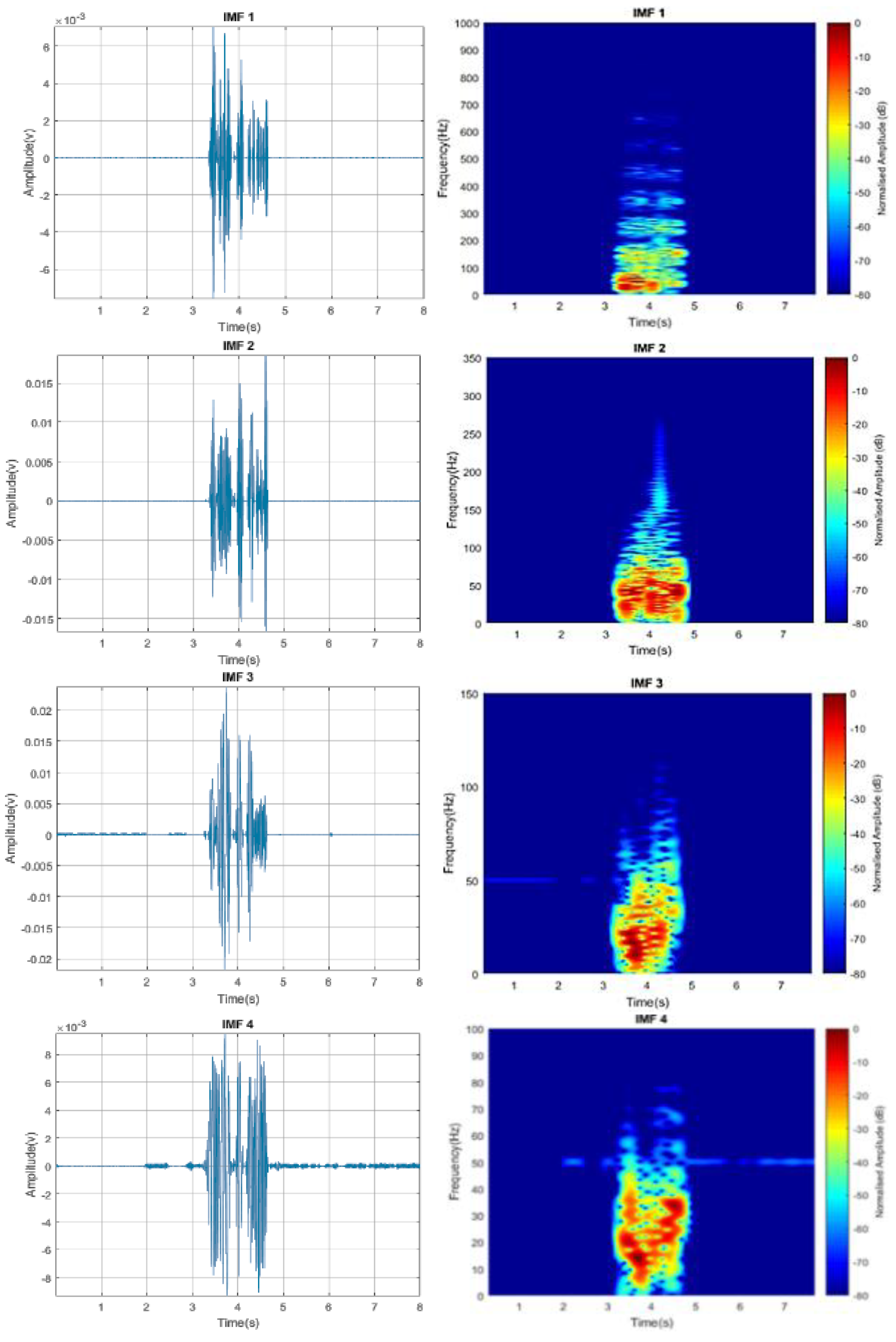
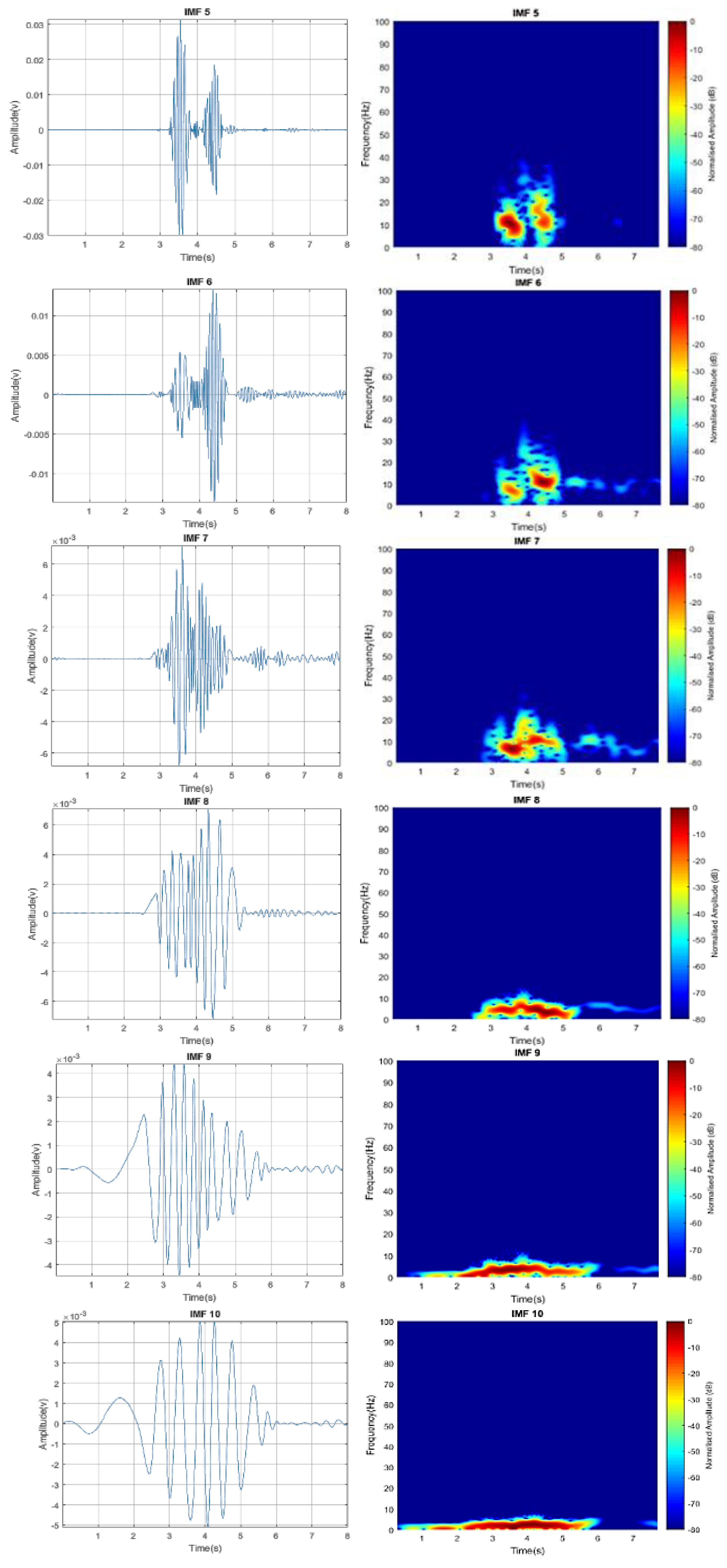
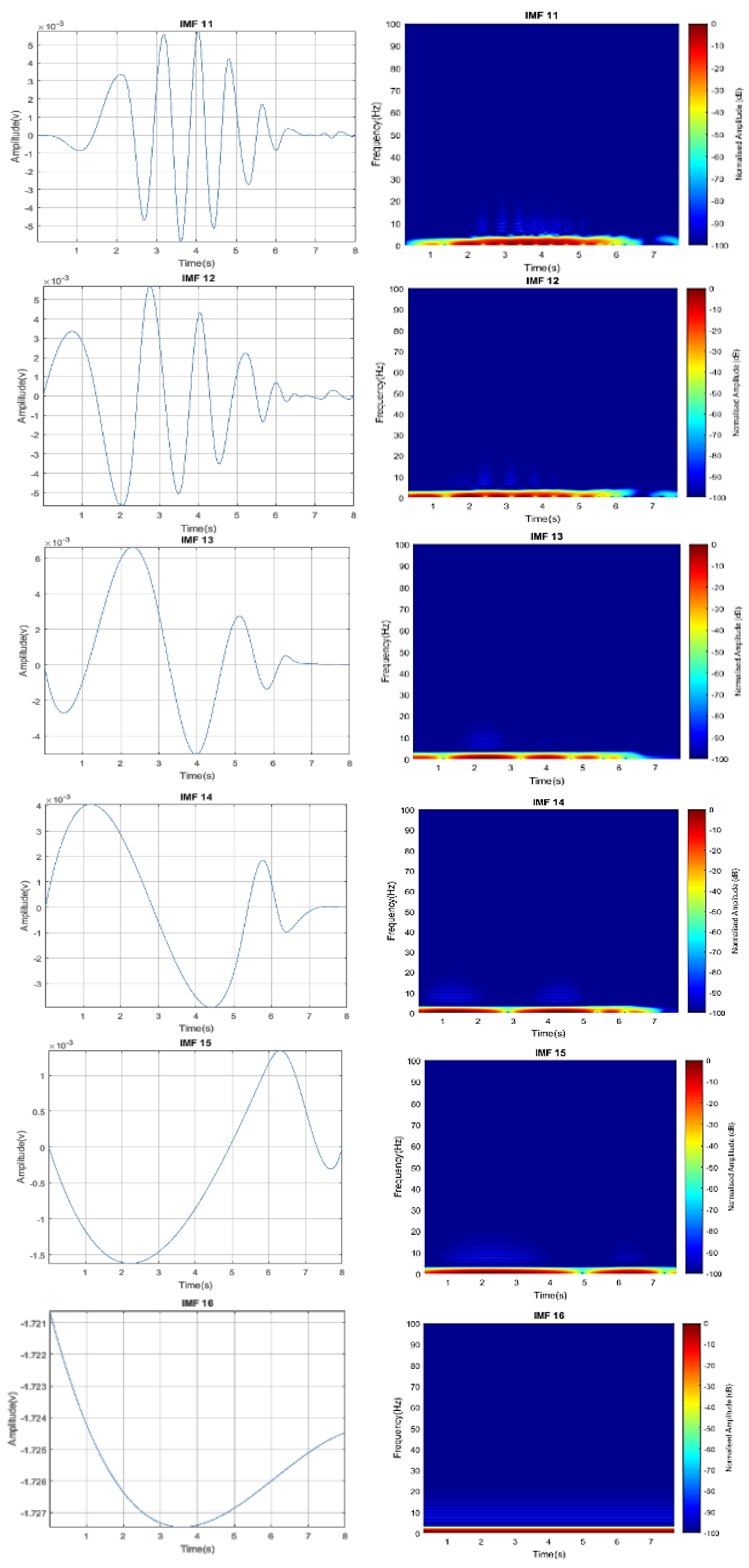
The empirical mode decomposition (EMD) involved a sifting process capability to decompose any given signal into an intrinsic component and derived non-linear functions called Intrinsic Mode Functions (IMF) [
41]. This technique was introduced by N.E Huang et al. to analyze a non-linear and non-stationary signal [
42]. It is a successive algorithm that enables the primary function, of which can be non-linearly derived from the original signal in an adaptive basis called the IMF. These IMFs are the corresponding frequency components available in the original data, efficiently helping to separate between the Doppler due to radial velocity and the micro-Doppler due to the rotating blade.
To achieve an instantaneous frequency component at a time, these conditions must be achieved [
40,
41]: i. the differences between the numbers of extremes to that of zero crossing must always be one or equal to zero and ii. the signal envelop’s mean value must, at all times, be equal to zero. This mean value is identified by the local minima and maxima of the signal envelope, hence, making the algorithm recursive in nature. To decompose the original signal into intrinsic functions, let y
(n) be the original signal received during the detection. A residue can be initialized as r
o = y
(n) for
i = 1. The signal y
(n) is used to form an upper and lower envelope through interpolation between the minimum and maximum extremes. The envelope mean value,
Yμ, is given by Equation (2).
where
is upper signal envelope and
is the lower envelope; a new signal,
is obtained by subtracting the mean value from the original signal as
If the IMF criteria were met by
then
= IMF(i); otherwise, the sifting process returned to the beginning until all minimum extremes became negative and all maximum extremes returned to positive. A residue was defined by
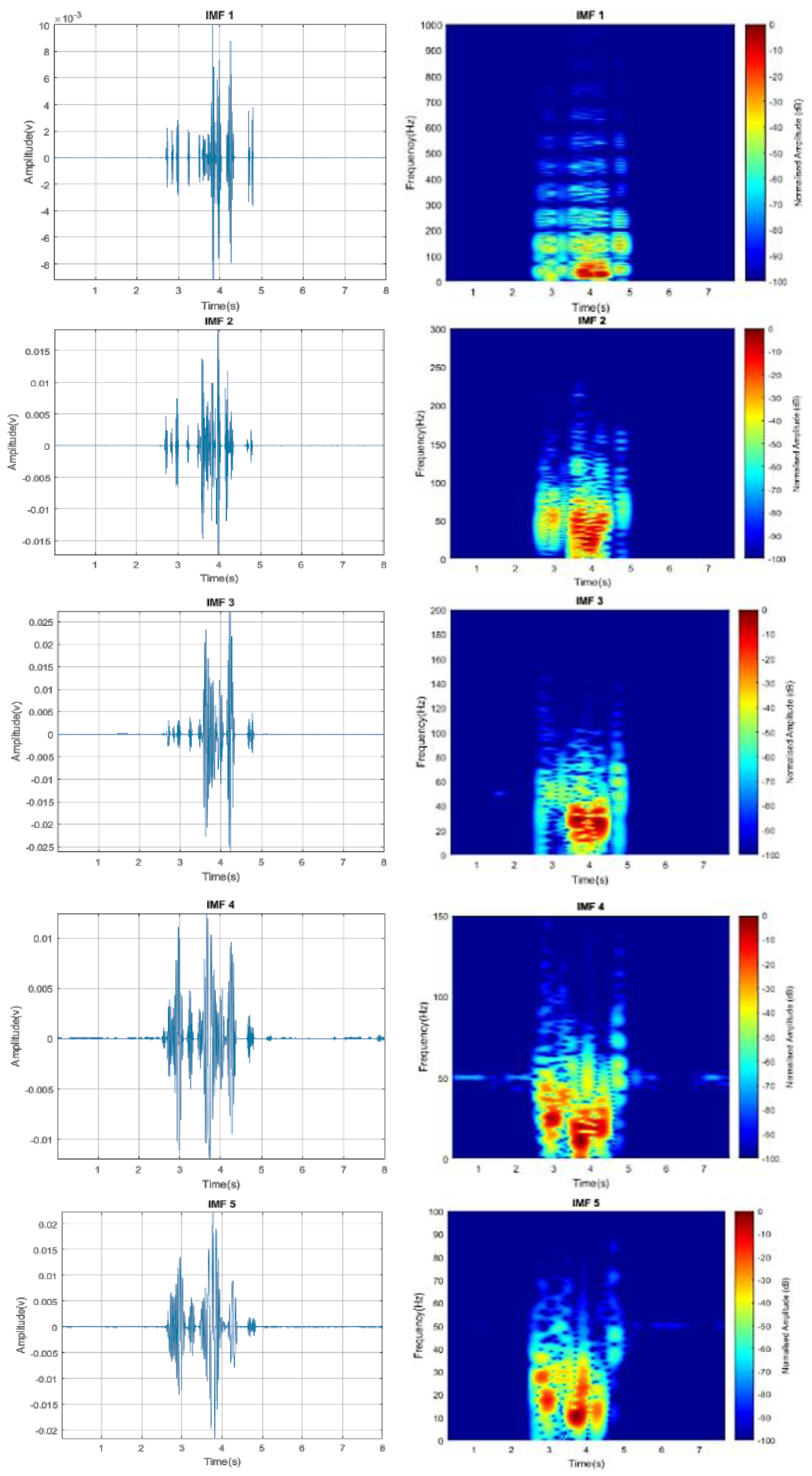
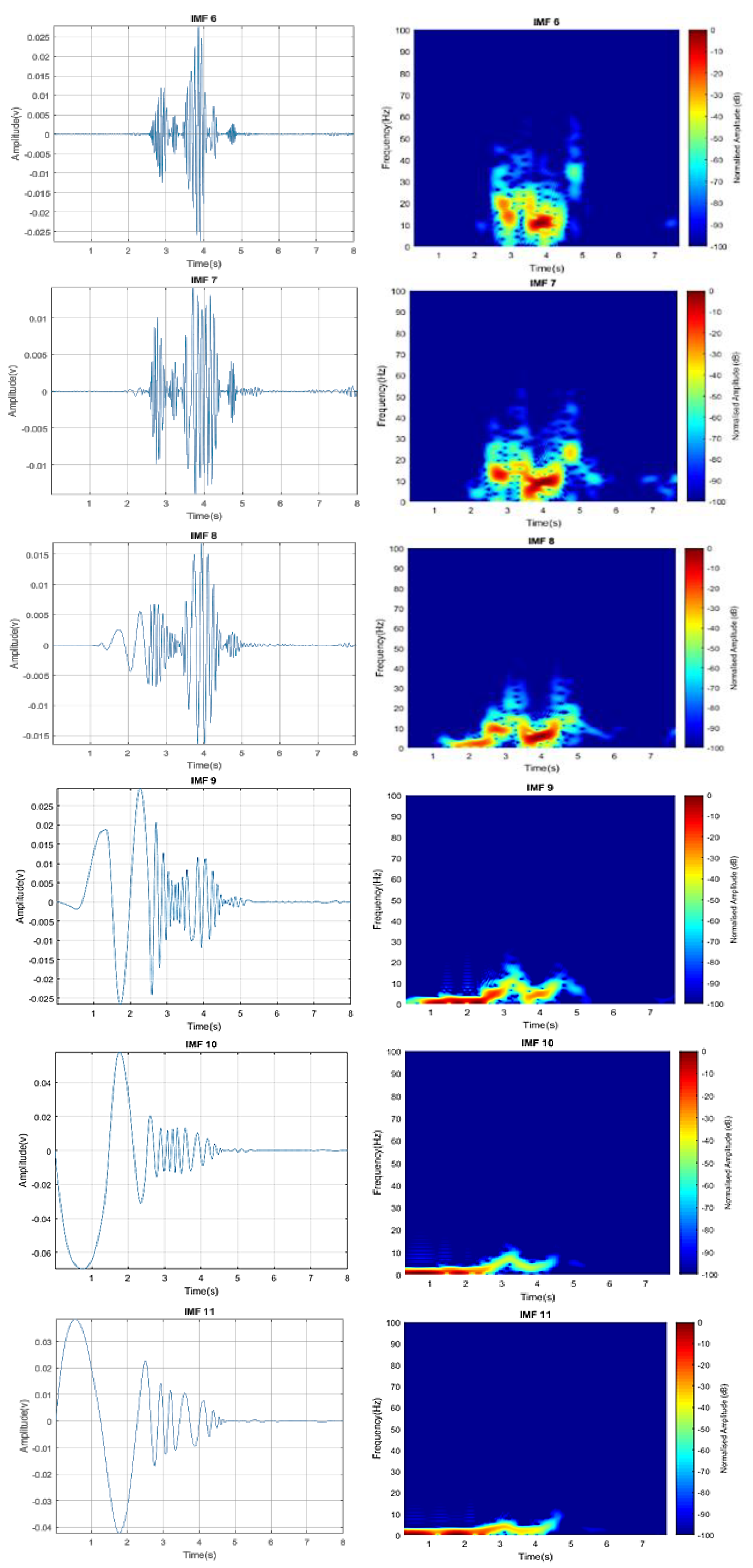
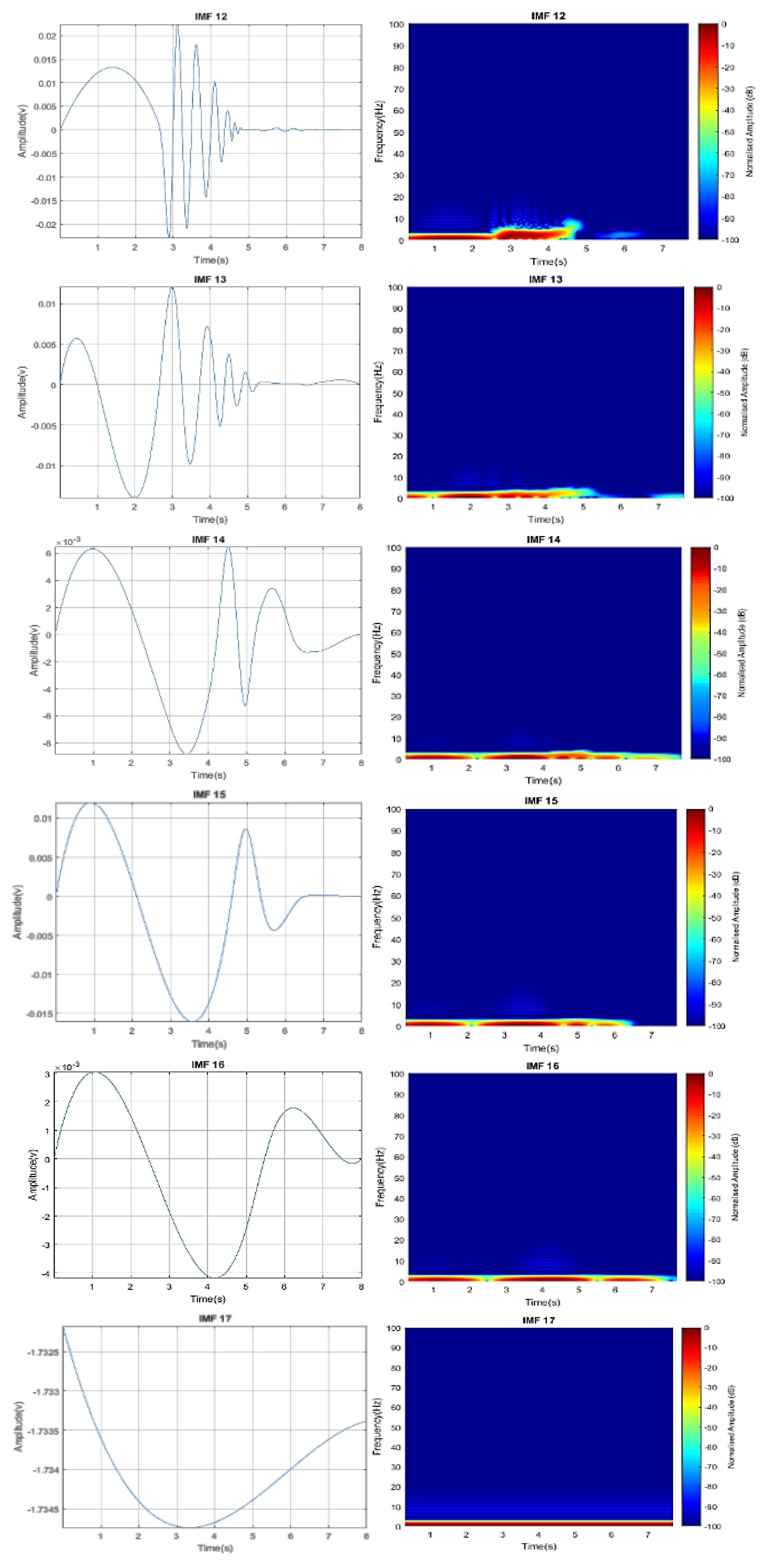
such that, once the condition is fulfilled, the sifting process stops; otherwise, the algorithm starts over again. Once the EMD provided the feature vector and calculated the energy of each corresponding IMF component, the time domain presentation of the IMFs can be plotted.
4. Conclusions
The paper highlighted the potential threats suffered as a result of drone misuse by civil society and why drone detection became essential. In an attempt to implement the DVB-S-based passive FSR system, this paper described the challenges derailing the use of a DVB-S satellite as an illuminator of opportunity for passive application, especially for an airborne target. Based on the FSR capability of detecting a very small signal variation, the passive FSR system was used and detected the quadcopter drone. After a pervasive summary of some implemented DVB-S-based radars, the Measat3 signal waveform was captured and be used for this work. Based on the two scenarios considered, we may be able to conclude that the drone was successfully detected. To further extract other features that help in identifying the drone, we employed EMD and decomposed the detected signal into an IMF for further feature extractions. Based on the extracted feature vectors, we may conclude that the DVB-S-based passive FSR system was successfully implemented and used to detect a low-profile, airborne target, i.e., a quadcopter drone. For now, the system achieved a detection altitude of up to 80 m above sea level, but can be improved by increasing the height of the receiving station. Future studies may include how these extracted vectors will be used for the classification of quadcopter drones from other types of drones and natural targets like birds.

 ,
, 























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}