Enhanced Redundant Measurement-Based Kalman Filter for Measurement Noise Covariance Estimation in INS/GNSS Integration



Abstract
:
1. Introduction
2. INS/GNSS Tightly Coupled Integration
2.1. Dynamic Model
2.2. Navigation Fusion with EKF
3. Enhanced Redundant Measurement-Based AKF
3.1. Redundant Measurement-Based Robust Adaptive Measurement Noise Covariance EstimationSubsection
3.2. Detection of GNSS Measurement Noise Statistics
3.3. Measurement Noise Covariance Estimation for Non-Gaussian Noise
3.4. Implementation of the Enhanced AKF
4. Test Results
4.1. Implementation of the Enhanced AKF
4.2. Performance Evaluation in Foliage Environment
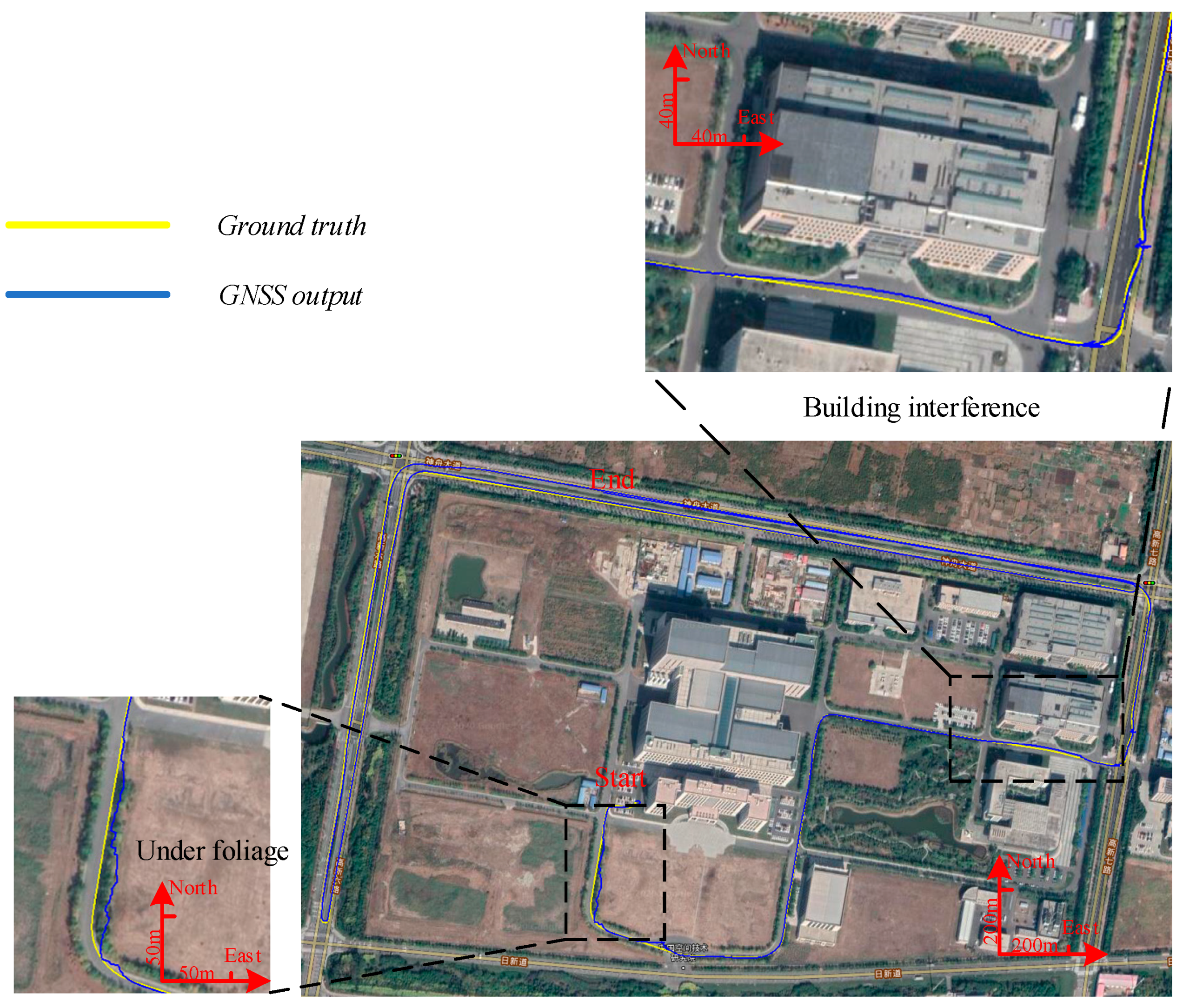
4.3. Performance Evaluation in Obstructed Areas
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Schmidt, G.T. Navigation sensors and systems in GNSS degraded and denied environments. Chin. J. Aeronaut. 2015, 28, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; Artech House: London, UK, 2008; pp. 363–387. [Google Scholar]
- Kalman, R.E. A new approach to linear filtering and prediction problem. J. Basic Eng. 1960, 82, 95–108. [Google Scholar] [CrossRef] [Green Version]
- Jazwinski, A.H. Stochastic Processes and Filtering Theory; Academic Press: London, UK, 1970; pp. 272–279. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. New Extension of the Kalman Filter to Nonlinear Systems. In Proceedings of the SPIE—The International Society for Optical Engineering, Orlando, FL, USA, 21–25 April 1997. [Google Scholar]
- Zhe, J.; Qi, S.; He, Y.; Han, J. A novel adaptive unscented Kalman filter for nonlinear estimation. In Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007. [Google Scholar]
- Wang, X.; Pan, Q.; Huang, H.; Gao, A. Overview of deterministic sampling filtering algorithms for nonlinear system. Control Decis. 2012, 27, 801–812. [Google Scholar]
- Deng, X.; Xie, J.; Ni, H. Improved Particle Filter for Target Tracking. Chin. J. Aeronaut. 2005, 18, 166–170. [Google Scholar] [CrossRef] [Green Version]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.J.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process 2002, 50, 174–188. [Google Scholar] [CrossRef] [Green Version]
- Singh, Y.; Mehra, R. Relative study of measurement noise covariance R and process noise covariance Q of the Kalman filter in estimation. IOSR J. Electr. Electron. Eng. 2015, 10, 112–116. [Google Scholar]
- Han, H.; Jian, W.; Du, M. GPS/BDS/INS tightly coupled integration accuracy improvement using an improved adaptive interacting multiple model with classified measurement update. Chin. J. Aeronaut. 2018, 31, 556–566. [Google Scholar] [CrossRef]
- Mehra, R. On the identification of variances and adaptive Kalman filtering. IEEE Trans. Autom. Control 1970, 15, 175–184. [Google Scholar] [CrossRef]
- Sage, A.P.; Husa, G.W. Adaptive filtering with unknown prior statistics. IEEE Trans. Autom. Control. 1970, 11, 760–769. [Google Scholar]
- Huang, Y.; Zhang, Y.; Wu, Z.; Li, N.; Chambers, J. A Novel Adaptive Kalman Filter with Inaccurate Process and Measurement Noise Covariance Matrices. IEEE Trans. Autom. Control 2018, 63, 594–601. [Google Scholar] [CrossRef] [Green Version]
- Mehra, R.K. Approaches to adaptive filtering. In Proceedings of the IEEE Symposium on Adaptive Processes (9th) Decision and Control, Austin, TX, USA, 7–9 December 1970. [Google Scholar]
- Meng, Y.; Gao, S.; Zhong, Y.; Hu, G.; Subic, A. Covariance matching based adaptive unscented Kalman filter for direct filtering in INS/GNSS integration. Acta Astronaut. 2016, 120, 171–181. [Google Scholar] [CrossRef]
- Li, X.R.; Bar-Shalom, Y. A recursive multiple model approach to noise identification. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 671–684. [Google Scholar] [CrossRef]
- Fang, J.; Sheng, Y. Study on innovation adaptive EKF for in-flight alignment of airborne POS. IEEE Trans. Instrum. Meas. 2011, 60, 1378–1388. [Google Scholar]
- Yang, Y.; Xu, T. An Adaptive Kalman Filter Based on Sage Windowing Weights and Variance Components. J. Navig. 2003, 56, 231–240. [Google Scholar] [CrossRef]
- Zhang, C. Approach to adaptive filtering algorithm. Acta Aeronaut. Astronaut. Sci. 1998, 19, 97–100. [Google Scholar]
- Zhang, H.; Chang, Y.H.; Che, H. Measurement-based adaptive Kalman filtering algorithm for GPS/INS integrated navigation system. J. Chin. Inertial Technol. 2010, 18, 696–701. [Google Scholar]
- Ge, B.; Zhang, H.; Jiang, L.; Li, Z.; Butt, M.M. Adaptive Unscented Kalman Filter for Target Tracking with Unknown Time-Varying Noise Covariance. Sensors 2019, 19, 1371. [Google Scholar] [CrossRef] [Green Version]
- Dhital, A.; Bancroft, J.; Lachapelle, G. A new approach for improving reliability of personal navigation devices under harsh GNSS signal conditions. Sensors 2013, 13, 15221–15241. [Google Scholar] [CrossRef] [Green Version]
- Ghaleb, F.; Zainal, A.; Rassam, M.; Abraham, A. Improved vehicle positioning algorithm using enhanced innovation-based adaptive Kalman filter. Pervasive Mob. Comput. 2017, 40, 139–155. [Google Scholar] [CrossRef]
- Srinivas, P.; Kumar, A. Overview of architecture for GPS-INS integration. In Proceedings of the 2017 Recent Developments in Control, Automation & Power Engineering, Noida, India, 26–27 October 2017. [Google Scholar]
- Zhu, Z.; Li, C. Study on real-time identification of GNSS multipath errors and its application. Aerosp. Sci. Technol. 2016, 52, 215–223. [Google Scholar] [CrossRef]
- Zhao, J.X.; Chang, Q.; Zhang, Q.S.; Zhang, J. Research of Ionospheric Time-Delay Error Simulation in High Dynamic GPS Signal Simulator. Chin. J. Aeronaut. 2003, 16, 169–176. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.J.; Feng, K.M.; Xie, S.X.; Zhou, Y.Q.; Li, C. Improved GPT2w model based on BP neural network and its global precision analysis. Syst. Eng. Electron. 2019, 41, 500–508. [Google Scholar]
- Zhou, Q.; Zhang, H.; Li, Y.; Li, Z. An Adaptive Low-Cost GNSS/MEMS-IMU Tightly-Coupled Integration System with Aiding Measurement in a GNSS Signal-Challenged Environment. Sensors 2015, 15, 23953–23982. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, S.; Wei, W.; Zhong, Y.; Subic, A. Sage windowing and random weighting adaptive filtering method for kinematic model error. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1488–1500. [Google Scholar] [CrossRef]
- Zheng, Z. Random weighting method. Acta Math. Appl. Sin. 1987, 10, 247–253. [Google Scholar]
- Benzerrouk, H.; Nebylov, A. Robust nonlinear filtering applied to integrated navigation system INS/GNSS under non Gaussian measurement noise effect. In Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2012. [Google Scholar]
- Silverman, B.W. Density Estimation for Statistics and Data Analysis; Chapman and Hall: London, UK, 1986; pp. 35–42. [Google Scholar]
- Rosenblatt, M. Remarks on some nonparametric estimates of a density function. Ann. Math. Stat. 1956, 27, 832–837. [Google Scholar] [CrossRef]
- Xu, Y.; Xu, N.; Feng, X. A new outlier detection algorithm based on kernel density estimation for ITS. In Proceedings of the 2016 IEEE International Conference on Internet of Things, Chengdu, China, 15–18 December 2016; pp. 258–262. [Google Scholar]
- Hoon de, M.J.L.; Hagen Van der, T.; Schoonewelle, H.; Dam van, H. Why Yule-Walker should not be used for autoregressive modelling. Ann. Nucl. Energy 1996, 23, 1219–1228. [Google Scholar] [CrossRef]
- Priestley, M.B. Spectral Analysis and Time Series; Academic Press: New York, NY, USA, 1981; pp. 372–374. [Google Scholar]
- Roth, K.; Kauppinen, I.; Esquef, P.A.A.; Vesa, V. Frequency warped Burg’s method for AR-modeling. In Proceedings of the IEEE Workshop on Applicat ions of Signal Processing to Audio and Acoustics, New Paltz, NY, USA, 19–22 October 2003. [Google Scholar]
- A Fast Implementation of Burg’s Method. Available online: https://opus-codec.org/docs/vos_fastburg.pdf (accessed on 9 September 2020).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Position Error (m) | Velocity Error (m/s) | Attitude Error (°) |
|---|---|---|---|
| Standard EKF | 5.52 | 0.38 | 0.22 |
| EIAKF | 6.24 | 0.29 | 0.25 |
| SRMAKF | 6.12 | 0.38 | 0.24 |
| ERMAKF | 4.60 | 0.17 | 0.18 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, B.; Zhang, H.; Fu, W.; Yang, J. Enhanced Redundant Measurement-Based Kalman Filter for Measurement Noise Covariance Estimation in INS/GNSS Integration. Remote Sens. 2020, 12, 3500. https://doi.org/10.3390/rs12213500
Ge B, Zhang H, Fu W, Yang J. Enhanced Redundant Measurement-Based Kalman Filter for Measurement Noise Covariance Estimation in INS/GNSS Integration. Remote Sensing. 2020; 12(21):3500. https://doi.org/10.3390/rs12213500
Chicago/Turabian StyleGe, Baoshuang, Hai Zhang, Wenxing Fu, and Jianbing Yang. 2020. "Enhanced Redundant Measurement-Based Kalman Filter for Measurement Noise Covariance Estimation in INS/GNSS Integration" Remote Sensing 12, no. 21: 3500. https://doi.org/10.3390/rs12213500