Fusion of High- and Medium-Resolution Optical Remote Sensing Imagery and GlobeLand30 Products for the Automated Detection of Intra-Urban Surface Water



Abstract
:
1. Introduction
- A technique is proposed to fuse the abundant water indices in the spectral dimension into high-resolution remote sensing images in order to solve the commission problem caused by insufficient spectral information to extract IUSW from high spatial resolution images.
- According to the morphological differences of IUSWs, IUSWs are classified into two types of IUSWs, and corresponding spatial features are constructed for both types of IUSWs, thus alleviating the problem that one spatial feature cannot fully represent different morphological types of IUSWs and enhancing the saliency of IUSW features.
- Optimized samples from available water products are automatically obtained and used in the IUSW automatic extraction method, thus reducing the uncertainty of a priori information products, and enabling the automatic detection of IUSW with high accuracy.
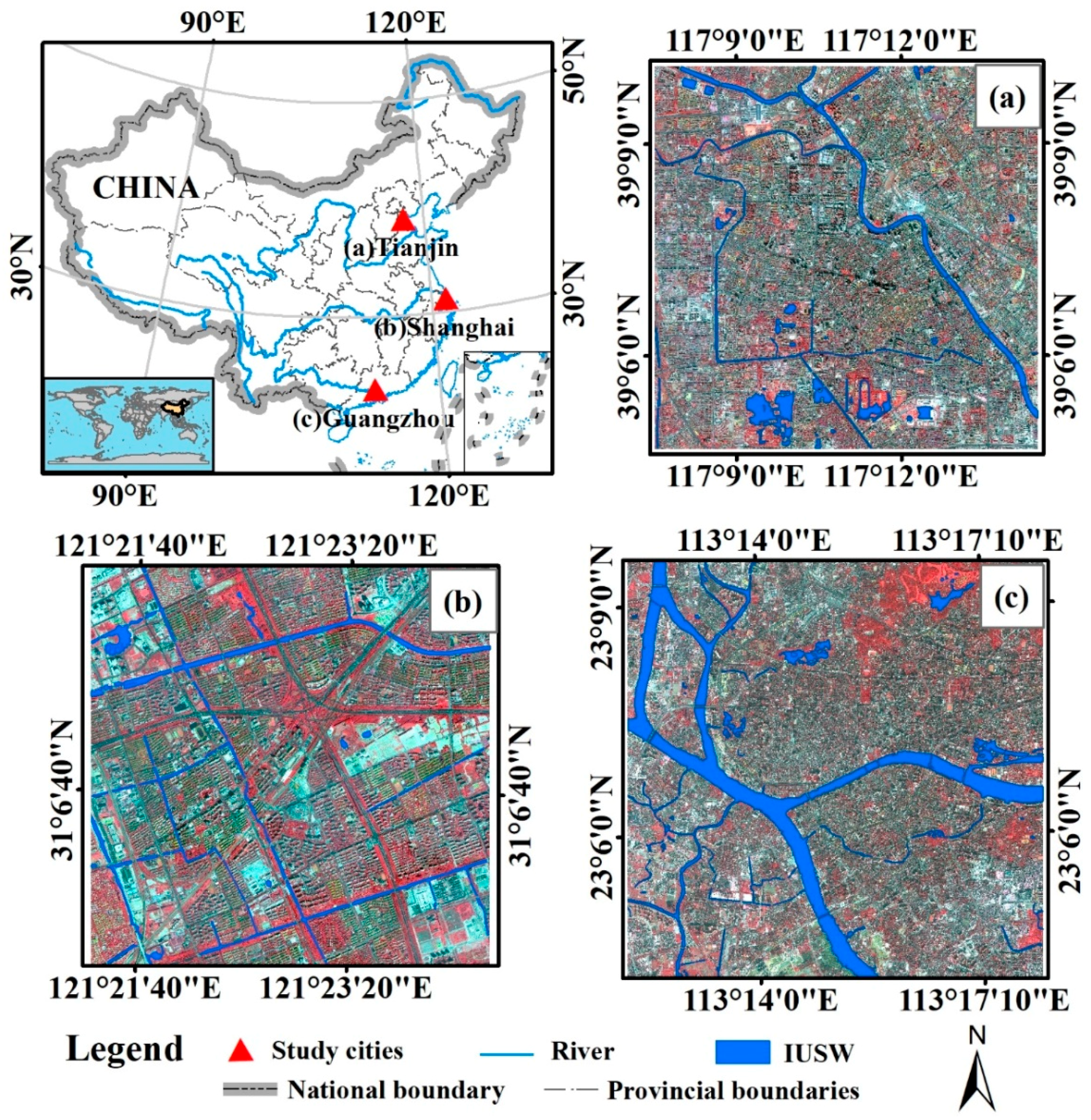
2. Study Area and Datasets
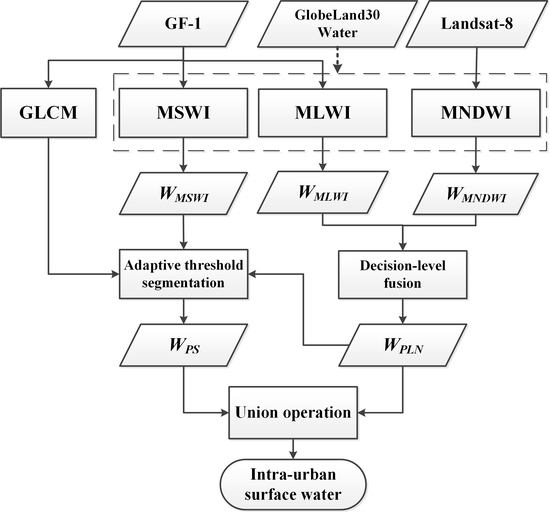
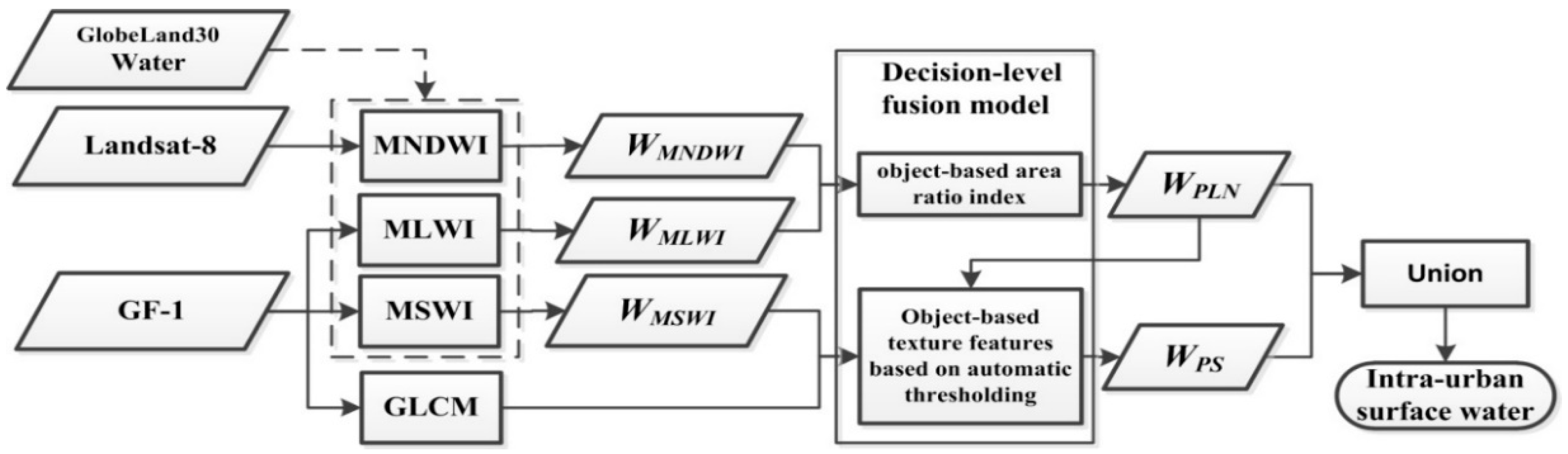
3. Methods
3.1. Preprocessing of GF-1 and Landsat-8 Images
3.2. Multiple Water Index Feature Extraction
3.2.1. MLWI/MSWI Extraction from GF-1 Imagery
3.2.2. MNDWI Extraction from Landsat-8 Imagery
3.3. IUSW Automatic Extraction Based on Adaptive Threshold Segmentation by the GlobeLand30 Product
3.3.1. Sample Optimization Using k-Means Clustering from the Water Body Types of GlobeLand30 Products
3.3.2. Adaptive Segmentation Method for Multiple Water Index Based on Optimized Samples
3.4. IUSW Automatic Optimization Based on Decision-Level Fusion Model
3.5. Classification Accuracy Assessment
4. Results
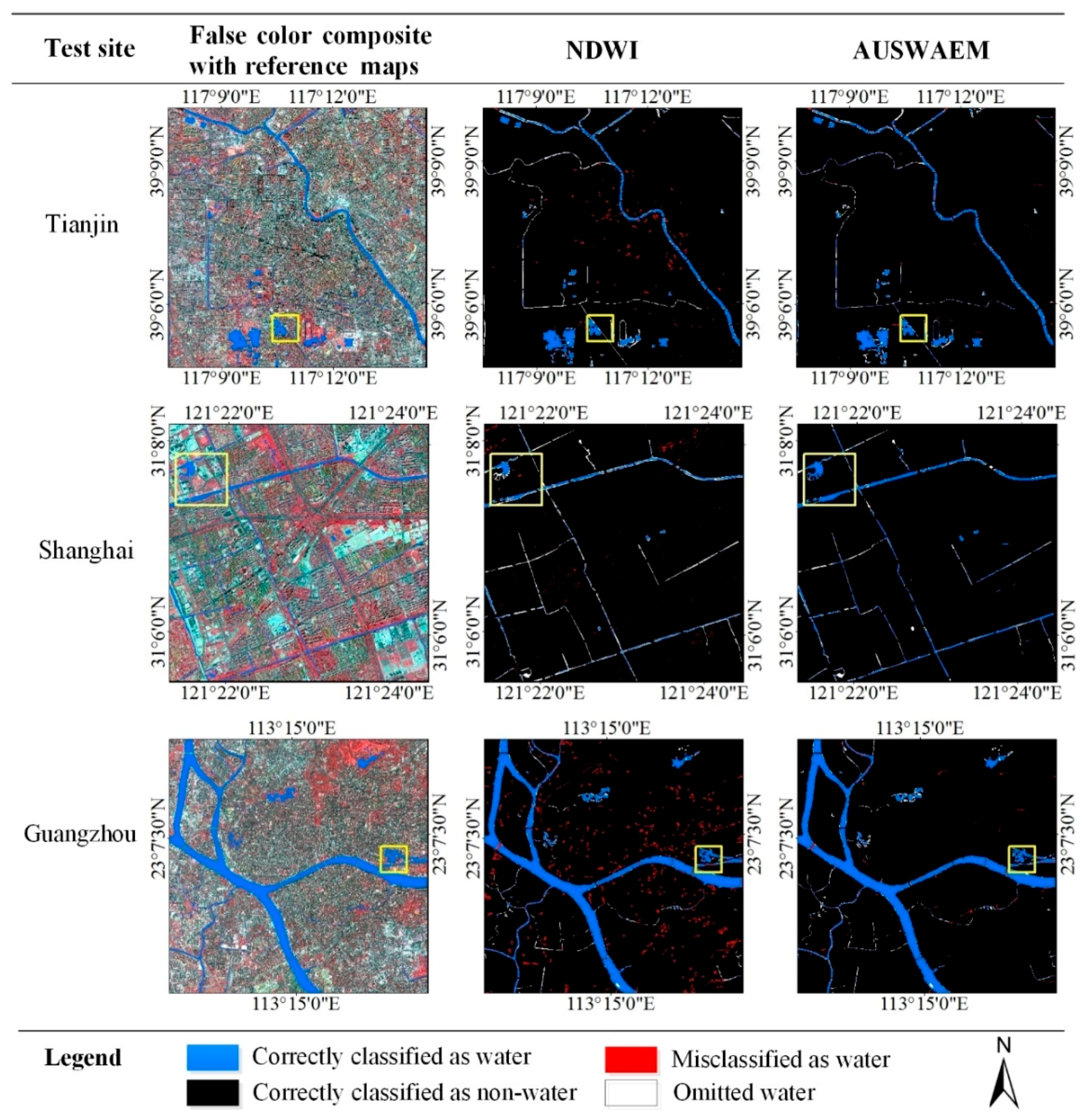
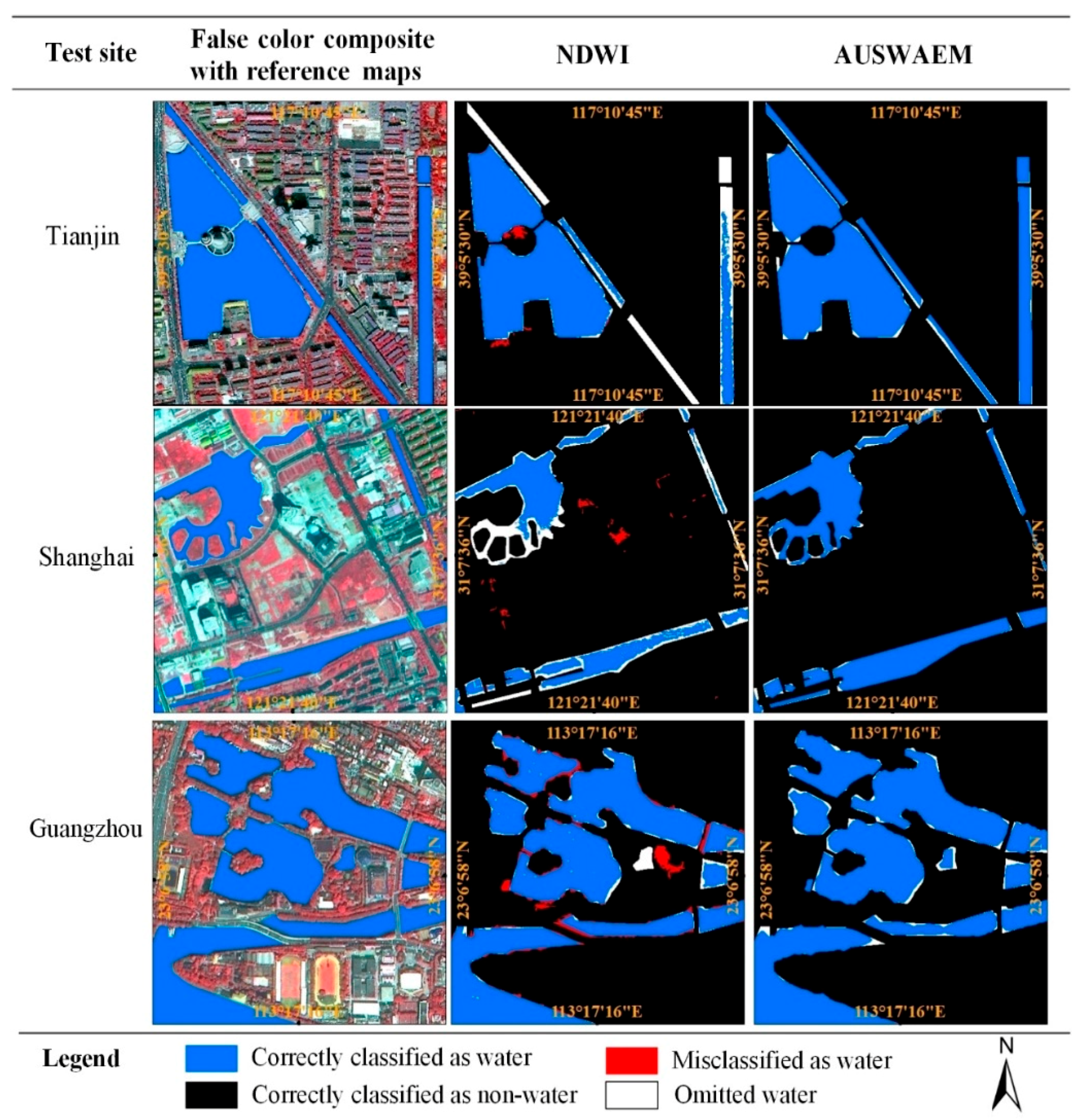
4.1. Comparison of Spatial Distribution Mapping Results of IUSW from the NDWI-Based Method and the AUSWAEM for a Three-Case Study in China
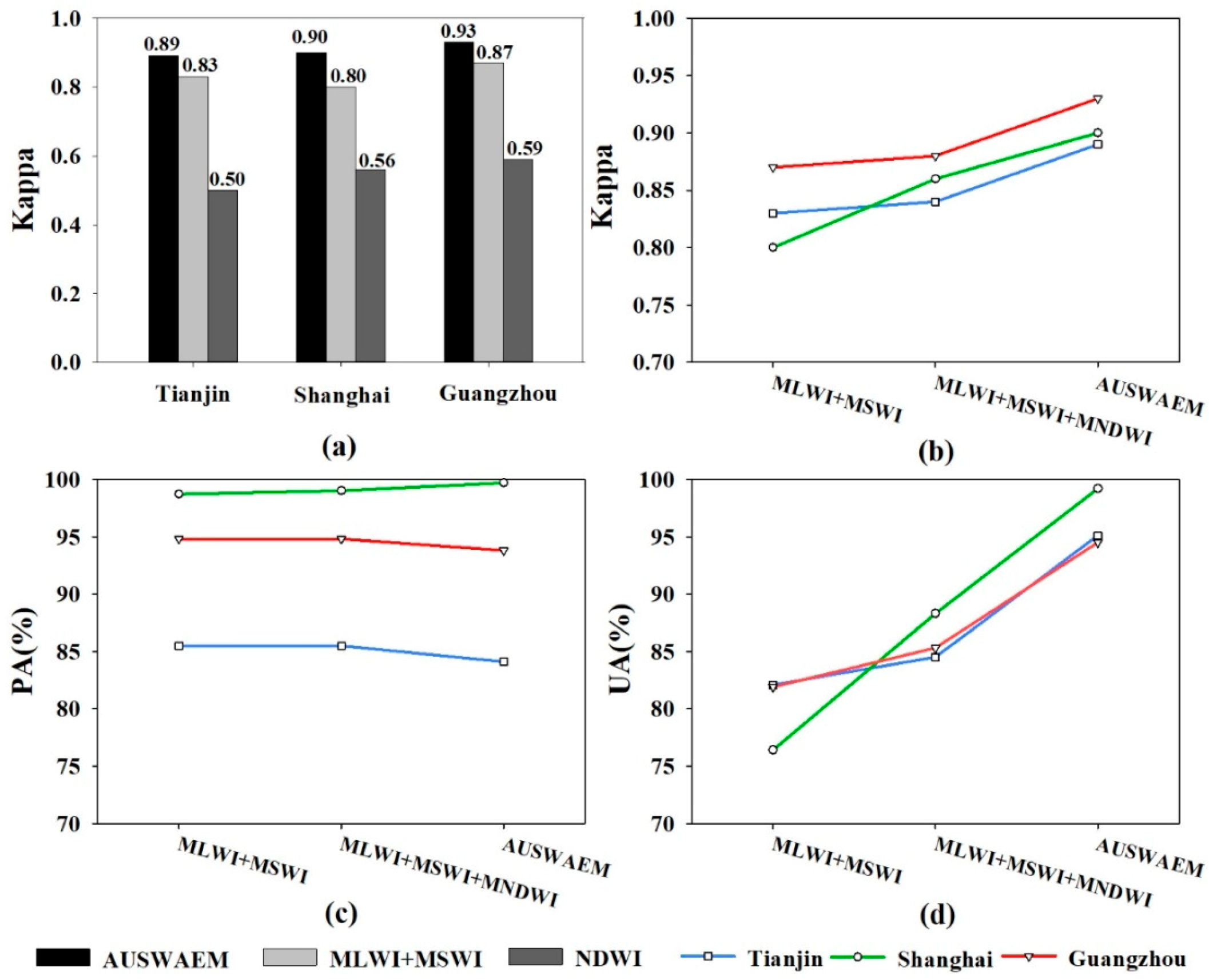
4.2. Accuracy Assessment Results of IUSW between the NDWI-Based Method and the AUSWAEM for a Three-Case Study in China
4.3. Analysis of the Importance of MLWI/MSWI Features
4.4. Validation and Analysis of Models and Threshold Sensitivity
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sun, L.; Chen, J.; Li, Q.; Huang, D. Dramatic uneven urbanization of large cities throughout the world in recent decades. Nat. Commun. 2020, 11, 1–9. [Google Scholar] [CrossRef]
- Su, Y.; Gao, W.; Guan, D.; Zuo, T. Achieving Urban Water Security: A Review of Water Management Approach from Technology Perspective. Water Resour. Manag. 2020, 34, 4163–4179. [Google Scholar] [CrossRef]
- Herndon, K.; Muench, R.E.; Cherrington, E.A.; Griffin, R.E. An Assessment of Surface Water Detection Methods for Water Resource Management in the Nigerien Sahel. Sensors 2020, 20, 431. [Google Scholar] [CrossRef] [Green Version]
- Wang, A.; Chan, E.H. The impact of power-geometry in participatory planning on urban greening. Urban For. Urban Green. 2020, 48, 126571. [Google Scholar] [CrossRef]
- Geneletti, D.; La Rosa, D.; Spyra, M.; Cortinovis, C. A review of approaches and challenges for sustainable planning in urban peripheries. Landsc. Urban Plan. 2017, 165, 231–243. [Google Scholar] [CrossRef]
- Liu, Y.; Li, Q.; Yang, L.; Mu, K.; Zhang, M.; Liu, J. Urban heat island effects of various urban morphologies under regional climate conditions. Sci. Total Environ. 2020, 743, 140589. [Google Scholar] [CrossRef] [PubMed]
- Hettiarachchi, S.; Wasko, C.; Sharma, A. Increase in flood risk resulting from climate change in a developed urban watershed—The role of storm temporal patterns. Hydrol. Earth Syst. Sci. 2018, 22, 2041–2056. [Google Scholar] [CrossRef] [Green Version]
- Hall, J.; Hossain, A.A. Mapping Urbanization and Evaluating Its Possible Impacts on Stream Water Quality in Chattanooga, Tennessee, Using GIS and Remote Sensing. Sustainability 2020, 12, 1980. [Google Scholar] [CrossRef] [Green Version]
- Liao, H.-Y.; Wen, T.-H. Extracting urban water bodies from high-resolution radar images: Measuring the urban surface morphology to control for radar’s double-bounce effect. Int. J. Appl. Earth Obs. Geoinf. 2020, 85, 102003. [Google Scholar] [CrossRef]
- Irwin, K.; Beaulne, D.; Braun, A.; Fotopoulos, G. Fusion of SAR, Optical Imagery and Airborne LiDAR for Surface Water Detection. Remote Sens. 2017, 9, 890. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Fan, R.; Yang, X.; Wang, J.; Latif, A. Extraction of Urban Water Bodies from High-Resolution Remote-Sensing Imagery Using Deep Learning. Water 2018, 10, 585. [Google Scholar] [CrossRef] [Green Version]
- Xie, H.; Luo, X.; Xu, X.; Pan, H.; Tong, X. Evaluation of Landsat 8 OLI imagery for unsupervised inland water extraction. Int. J. Remote Sens. 2016, 37, 1826–1844. [Google Scholar] [CrossRef]
- Huang, X.; Xie, C.; Fang, X.; Zhang, L. Combining Pixel- and Object-Based Machine Learning for Identification of Water-Body Types From Urban High-Resolution Remote-Sensing Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 2097–2110. [Google Scholar] [CrossRef]
- Song, S.; Liu, J.; Liu, Y.; Feng, G.; Han, H.; Yao, Y.; Du, M. Intelligent Object Recognition of Urban Water Bodies Based on Deep Learning for Multi-Source and Multi-Temporal High Spatial Resolution Remote Sensing Imagery. Sensors 2020, 20, 397. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Y.; Li, Z.; Zeng, C.; Xia, G.-S.; Shen, H. An Urban Water Extraction Method Combining Deep Learning and Google Earth Engine. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 769–782. [Google Scholar] [CrossRef]
- Guo, H.; He, G.; Jiang, W.; Yin, R.; Yan, L.; Leng, W. A Multi-Scale Water Extraction Convolutional Neural Network (MWEN) Method for GaoFen-1 Remote Sensing Images. ISPRS Int. J. Geo-Inf. 2020, 9, 189. [Google Scholar] [CrossRef] [Green Version]
- Bryant, R.G.; Rainey, M. Investigation of flood inundation on playas within the Zone of Chotts, using a time-series of AVHRR. Remote Sens. Environ. 2002, 82, 360–375. [Google Scholar] [CrossRef]
- Jain, S.K.; Lohani, A.K.; Singh, R.D.; Chaudhary, A.; Thakural, L.N. Glacial lakes and glacial lake outburst flood in a Himalayan basin using remote sensing and GIS. Nat. Hazards 2012, 62, 887–899. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated Water Extraction Index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Yang, X.; Qin, Q.; Grussenmeyer, P.; Koehl, M. Urban surface water body detection with suppressed built-up noise based on water indices from Sentinel-2 MSI imagery. Remote Sens. Environ. 2018, 219, 259–270. [Google Scholar] [CrossRef]
- Isikdogan, F.; Bovik, A.C.; Passalacqua, P. Surface Water Mapping by Deep Learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4909–4918. [Google Scholar] [CrossRef]
- Sun, X.; Li, L.; Zhang, B.; Chen, D.; Gao, L. Soft urban water cover extraction using mixed training samples and Support Vector Machines. Int. J. Remote Sens. 2015, 36, 3331–3344. [Google Scholar] [CrossRef]
- Xie, H.; Luo, X.; Xu, X.; Pan, H.; Tong, X. Automated Subpixel Surface Water Mapping from Heterogeneous Urban Environments Using Landsat 8 OLI Imagery. Remote Sens. 2016, 8, 584. [Google Scholar] [CrossRef] [Green Version]
- Sun, W.; Du, B.; Xiong, S. Quantifying Sub-Pixel Surface Water Coverage in Urban Environments Using Low-Albedo Fraction from Landsat Imagery. Remote Sens. 2017, 9, 428. [Google Scholar] [CrossRef] [Green Version]
- Klein, I.; Gessner, U.; Dietz, A.; Kuenzer, C. Global WaterPack—A 250 m resolution dataset revealing the daily dynamics of global inland water bodies. Remote Sens. Environ. 2017, 198, 345–362. [Google Scholar] [CrossRef]
- Pan, F.; Xi, X.; Wang, C. A Comparative Study of Water Indices and Image Classification Algorithms for Mapping Inland Surface Water Bodies Using Landsat Imagery. Remote Sens. 2020, 12, 1611. [Google Scholar] [CrossRef]
- Zhang, G.; Zheng, G.; Gao, Y.; Xiang, Y.; Lei, Y.; Li, J. Automated water classification in the Tibetan plateau using Chinese GF-1 WFV data. Photogram. Eng. Remote Sens. 2017, 83, 509–519. [Google Scholar] [CrossRef]
- Fisher, A.; Flood, N.; Danaher, T. Comparing Landsat water index methods for automated water classification in eastern Australia. Remote Sens. Environ. 2016, 175, 167–182. [Google Scholar] [CrossRef]
- Wang, X.; Xie, S.; Zhang, X.; Chen, C.; Guo, H.; Du, J.; Duan, Z. A robust Multi-Band Water Index (MBWI) for automated extraction of surface water from Landsat 8 OLI imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 68, 73–91. [Google Scholar] [CrossRef]
- Chen, F.; Chen, X.; Van De Voorde, T.; Roberts, D.; Jiang, H.; Xu, W. Open water detection in urban environments using high spatial resolution remote sensing imagery. Remote Sens. Environ. 2020, 242, 111706. [Google Scholar] [CrossRef]
- Wu, W.; Li, Q.; Zhang, Y.; Du, X.; Wang, H. Two-Step Urban Water Index (TSUWI): A New Technique for High-Resolution Mapping of Urban Surface Water. Remote Sens. 2018, 10, 1704. [Google Scholar] [CrossRef] [Green Version]
- Xie, C.; Huang, X.; Zeng, W.; Fang, X. A novel water index for urban high-resolution eight-band WorldView-2 imagery. Int. J. Digit. Earth 2016, 9, 925–941. [Google Scholar] [CrossRef]
- Shen, Y.; Chen, J.; Xiao, L.; Pan, D. Optimizing multiscale segmentation with local spectral heterogeneity measure for high resolution remote sensing images. ISPRS J. Photogramm. Remote Sens. 2019, 157, 13–25. [Google Scholar] [CrossRef]
- Wang, L.; Yan, J.; Mu, L.; Huang, L. Knowledge discovery from remote sensing images: A review. Wiley Interdiscip. Rev. Data Min. Knowl. Discov. 2020, 10. [Google Scholar] [CrossRef]
- Li, K.; Chen, Y. A Genetic Algorithm-Based Urban Cluster Automatic Threshold Method by Combining VIIRS DNB, NDVI, and NDBI to Monitor Urbanization. Remote Sens. 2018, 10, 277. [Google Scholar] [CrossRef] [Green Version]
- Hadavand, A.; Saadatseresht, M.; Homayouni, S. Segmentation parameter selection for object-based land-cover mapping from ultra high resolution spectral and elevation data. Int. J. Remote Sens. 2017, 38, 3586–3607. [Google Scholar] [CrossRef]
- Han, Q.; Niu, Z. Construction of the Long-Term Global Surface Water Extent Dataset Based on Water-NDVI Spatio-Temporal Parameter Sets. Remote Sens. 2020, 12, 2675. [Google Scholar] [CrossRef]
- Chen, J.; Cao, X.; Peng, S.; Ren, H. Analysis and Applications of GlobeLand30: A Review. ISPRS Int. J. Geo-Inf. 2017, 6, 230. [Google Scholar] [CrossRef] [Green Version]
- Bijeesh, T.V.; Narasimhamurthy, K.N. Surface water detection and delineation using remote sensing images: A review of methods and algorithms. Sustain. Water Resour. Manag. 2020, 6, 1–23. [Google Scholar] [CrossRef]
- Huang, C.; Chen, Y.; Zhang, S.; Wu, J. Detecting, Extracting, and Monitoring Surface Water From Space Using Optical Sensors: A Review. Rev. Geophys. 2018, 56, 333–360. [Google Scholar] [CrossRef]
- Li, Z.; Zhou, C.; Yang, X.; Chen, X.; Meng, F.; Lü, C.; Pan, T.; Qi, W. Urban landscape extraction and analysis in the mega-city of China’s coastal regions using high-resolution satellite imagery: A case of Shanghai, China. Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 140–150. [Google Scholar] [CrossRef]
- Gao, H.; Gu, X.; Yu, T.; Liu, L.; Sun, Y.; Xie, Y.; Liu, Q. Validation of the Calibration Coefficient of the GaoFen-1 PMS Sensor Using the Landsat 8 OLI. Remote Sens. 2016, 8, 132. [Google Scholar] [CrossRef] [Green Version]
- Arsanjani, J.J.; Fritz, S.; Tayyebi, A. Assessing the suitability of GlobeLand30 for mapping land cover in Germany. Int. J. Digit. Earth 2016, 9, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Li, Q.; Liu, H.; Li, J. Assessing and Improving the Accuracy of GlobeLand30 Data for Urban Area Delineation by Combining Multisource Remote Sensing Data. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1860–1864. [Google Scholar] [CrossRef]
- Yang, Y.; Xiao, P.; Feng, X.; Li, H. Accuracy assessment of seven global land cover datasets over China. ISPRS J. Photogramm. Remote Sens. 2017, 125, 156–173. [Google Scholar] [CrossRef]
- Huang, W.; Zhang, G.; Tang, X.; Li, D. Compensation for Distortion of Basic Satellite Images Based on Rational Function Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5767–5775. [Google Scholar] [CrossRef]
- Li, H.; Jing, L.; Tang, Y. Assessment of Pansharpening Methods Applied to WorldView-2 Imagery Fusion. Sensors 2017, 17, 89. [Google Scholar] [CrossRef]
- Li, S.S.; Peng, M.; Wu, C.S.; Feng, X.X.; Wu, Y.W. Optimal selection of GCPs from Global Land Survey 2005 for precision geometric correction of Landsat-8 imagery. Eur. J. Remote Sens. 2015, 48, 303–318. [Google Scholar] [CrossRef]
- Nazeer, M.; Nichol, J.; Yung, Y.-K. Evaluation of atmospheric correction models and Landsat surface reflectance product in an urban coastal environment. Int. J. Remote Sens. 2014, 35, 6271–6291. [Google Scholar] [CrossRef]
- Yang, X.; Zhao, S.; Qin, X.; Zhao, N.; Liang, L. Mapping of Urban Surface Water Bodies from Sentinel-2 MSI Imagery at 10 m Resolution via NDWI-Based Image Sharpening. Remote Sens. 2017, 9, 596. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Han, X.; Zhang, L.; Gong, J.; Liao, W.; Benediktsson, J.A. Generalized Differential Morphological Profiles for Remote Sensing Image Classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1736–1751. [Google Scholar] [CrossRef] [Green Version]
- Lv, Z.Y.; Liu, T.; Shi, C.; Benediktsson, J.A.; Du, H. Novel Land Cover Change Detection Method Based on k-Means Clustering and Adaptive Majority Voting Using Bitemporal Remote Sensing Images. IEEE Access 2019, 7, 34425–34437. [Google Scholar] [CrossRef]
- Bhola, R.; Krishna, N.H.; Ramesh, K.; Senthilnath, J.; Anand, G. Detection of the power lines in UAV remote sensed images using spectral-spatial methods. J. Environ. Manag. 2018, 206, 1233–1242. [Google Scholar] [CrossRef]
- Puissant, A.; Hirsch, J.; Weber, C. The utility of texture analysis to improve per-pixel classification for high to very high spatial resolution imagery. Int. J. Remote Sens. 2005, 26, 733–745. [Google Scholar] [CrossRef]
- Yang, X.; Chen, L. Evaluation of automated urban surface water extraction from Sentinel-2A imagery using different water indices. J. Appl. Remote Sens. 2017, 11, 026016. [Google Scholar] [CrossRef]
- Yao, F.; Wang, C.; Dong, D.; Luo, J.; Shen, Z.; Yang, K. High-Resolution Mapping of Urban Surface Water Using ZY-3 Multi-Spectral Imagery. Remote Sens. 2015, 7, 12336–12355. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study Area | Sensors | Location 1 (°)/ Path-Row | Acquisition Data | Spatial Resolution 2 (m) | Area (km2) |
|---|---|---|---|---|---|
| Tianjin | GF1-PMS | 39.1N/117.2E | 2016-4-9 | 2/8 | 100 |
| OLI | 123/33 | 2016-5-4 | 15/30 | ||
| Shanghai | GF1-PMS | 31.0N/121.1E | 2016-9-3 | 2/8 | 25 |
| OLI | 118/38 | 2016-6-2 | 15/30 | ||
| Guangzhou | GF1-PMS | 23.2N/113.2E | 2016-2-20 | 2/8 | 100 |
| OLI | 122/44 | 2016-12-7 | 15/30 |
| Study Area | Water Index | Water | Non-Water | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Max | Min | Mean | Stdev | Max | Min | Mean | Stdev | ||
| Tianjin | MNDWI | 0.12 | 0.01 | 0.07 | 0.03 | 0.01 | −0.17 | −0.05 | 0.04 |
| MLWI | 0.41 | 0.26 | 0.34 | 0.04 | 0.26 | −0.01 | 0.17 | 0.05 | |
| MSWI | 1.73 | 0.28 | 0.36 | 0.05 | 0.28 | 0.02 | 0.21 | 0.05 | |
| Shanghai | MNDWI | 0.21 | 0.06 | 0.13 | 0.04 | 0.06 | −0.21 | −0.01 | 0.05 |
| MLWI | 0.34 | 0.07 | 0.20 | 0.07 | 0.07 | −0.19 | −0.05 | 0.07 | |
| MSWI | 1.08 | 0.20 | 0.41 | 0.09 | 0.20 | −0.16 | −0.01 | 0.10 | |
| Guangzhou | MNDWI | 0.17 | 0.08 | 0.14 | 0.02 | 0.08 | −0.20 | 0.01 | 0.05 |
| MLWI | 0.43 | 0.28 | 0.38 | 0.02 | 0.28 | −0.04 | 0.18 | 0.06 | |
| MSWI | 1.60 | 0.07 | 0.37 | 0.08 | 1.39 | −0.02 | 0.23 | 0.07 | |
| Study Area | MNDWI | MLWI | MSWI |
|---|---|---|---|
| Tianjin | 0.04 | 0.30 | 0.31 |
| Shanghai | 0.09 | 0.13 | 0.32 |
| Guangzhou | 0.12 | 0.36 | 0.29 |
| Study Area | Method | Kappa | PA (%) | UA (%) |
|---|---|---|---|---|
| Tianjin | AUSWAEM | 0.89 | 84.1 | 95.1 |
| NDWI | 0.50 | 77.6 | 40.4 | |
| Shanghai | AUSWAEM | 0.90 | 99.7 | 99.2 |
| NDWI | 0.56 | 49.8 | 68.2 | |
| Guangzhou | AUSWAEM | 0.93 | 93.8 | 94.5 |
| NDWI | 0.59 | 95.4 | 48.2 |
| Model | Kappa Coefficient | Kappa Average | Model Sensitivity | ||
|---|---|---|---|---|---|
| Tianjin | Shanghai | Guangzhou | Study Areas | Std | |
| MLWI + MSWI | 0.83 | 0.8 | 0.87 | 0.83 | 0.03 |
| AUSWAEM | 0.89 | 0.9 | 0.93 | 0.91 | 0.02 |
| NDVI | 0.50 | 0.56 | 0.59 | 0.55 | 0.04 |
| Water Index | Threshold Parameters | Threshold Sensitivity | ||
|---|---|---|---|---|
| Tianjin | Shanghai | Guangzhou | Std | |
| MNDWI | 0.04 | 0.09 | 0.12 | 0.03 |
| MLWI | 0.30 | 0.13 | 0.36 | 0.10 |
| MSWI | 0.31 | 0.32 | 0.29 | 0.01 |
| NDVI | 0.30 | 0.40 | 0.3 | 0.05 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Yang, X. Fusion of High- and Medium-Resolution Optical Remote Sensing Imagery and GlobeLand30 Products for the Automated Detection of Intra-Urban Surface Water. Remote Sens. 2020, 12, 4037. https://doi.org/10.3390/rs12244037
Li Z, Yang X. Fusion of High- and Medium-Resolution Optical Remote Sensing Imagery and GlobeLand30 Products for the Automated Detection of Intra-Urban Surface Water. Remote Sensing. 2020; 12(24):4037. https://doi.org/10.3390/rs12244037
Chicago/Turabian StyleLi, Zhi, and Xiaomei Yang. 2020. "Fusion of High- and Medium-Resolution Optical Remote Sensing Imagery and GlobeLand30 Products for the Automated Detection of Intra-Urban Surface Water" Remote Sensing 12, no. 24: 4037. https://doi.org/10.3390/rs12244037
APA StyleLi, Z., & Yang, X. (2020). Fusion of High- and Medium-Resolution Optical Remote Sensing Imagery and GlobeLand30 Products for the Automated Detection of Intra-Urban Surface Water. Remote Sensing, 12(24), 4037. https://doi.org/10.3390/rs12244037