The Forest Line Mapper: A Semi-Automated Tool for Mapping Linear Disturbances in Forests



Abstract
:
1. Introduction
- To describe the algorithms adopted in each step of the FLM,
- To report on an experiment comparing the accuracy of the FLM to a public dataset produced by manual digitization, and
- To assess the potential of linear-feature metrics extracted by the FLM to characterize lines and ground conditions in a manner that might be useful for forestry and ecological applications.
2. Materials and Methods
2.1. Overview and Study Structure
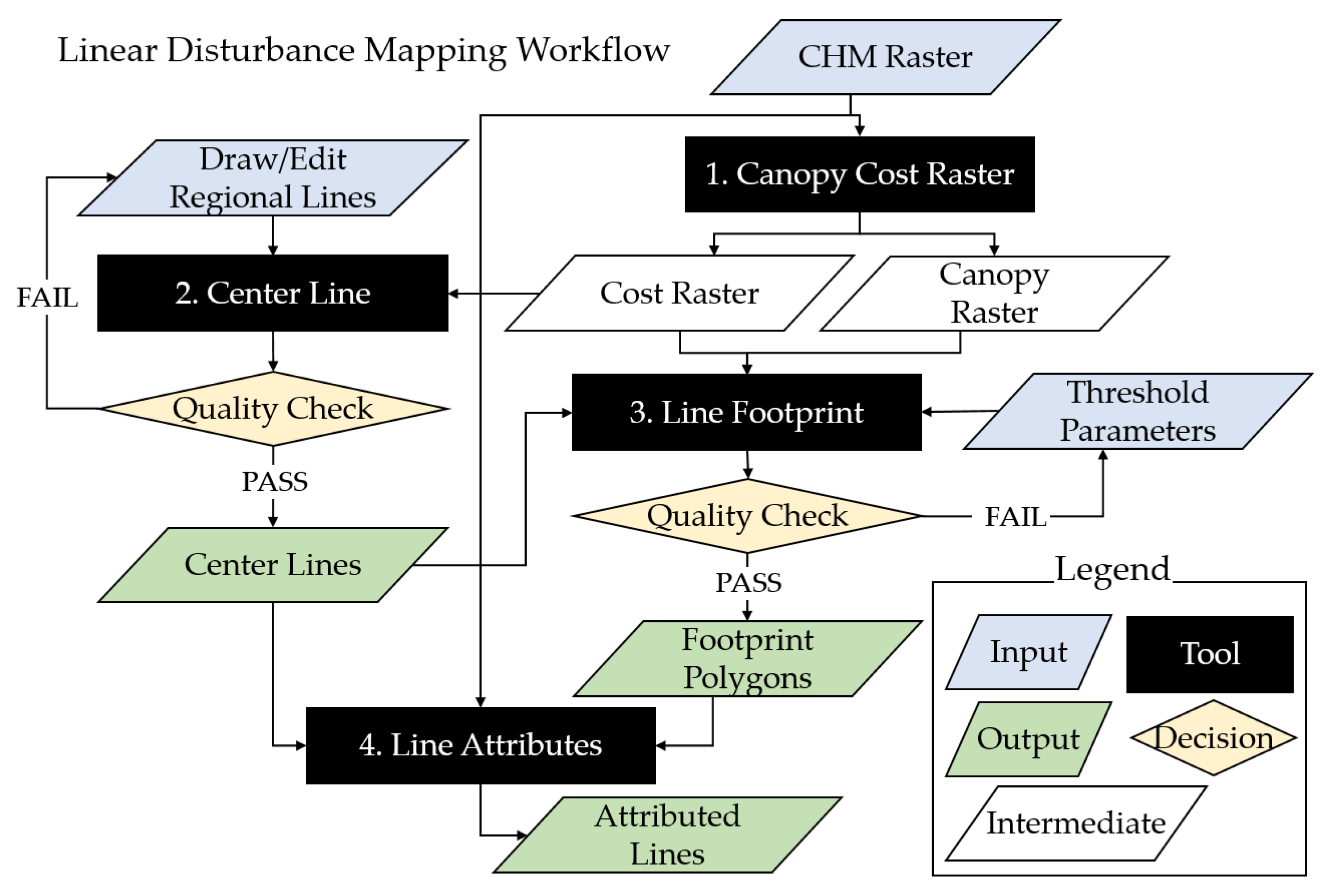
2.2. Linear-Disturbance Mapping Algorithm
2.2.1. Inputs and Cost Rasters
2.2.2. Center Line Mapping
2.2.3. Linear Footprint Polygon Mapping
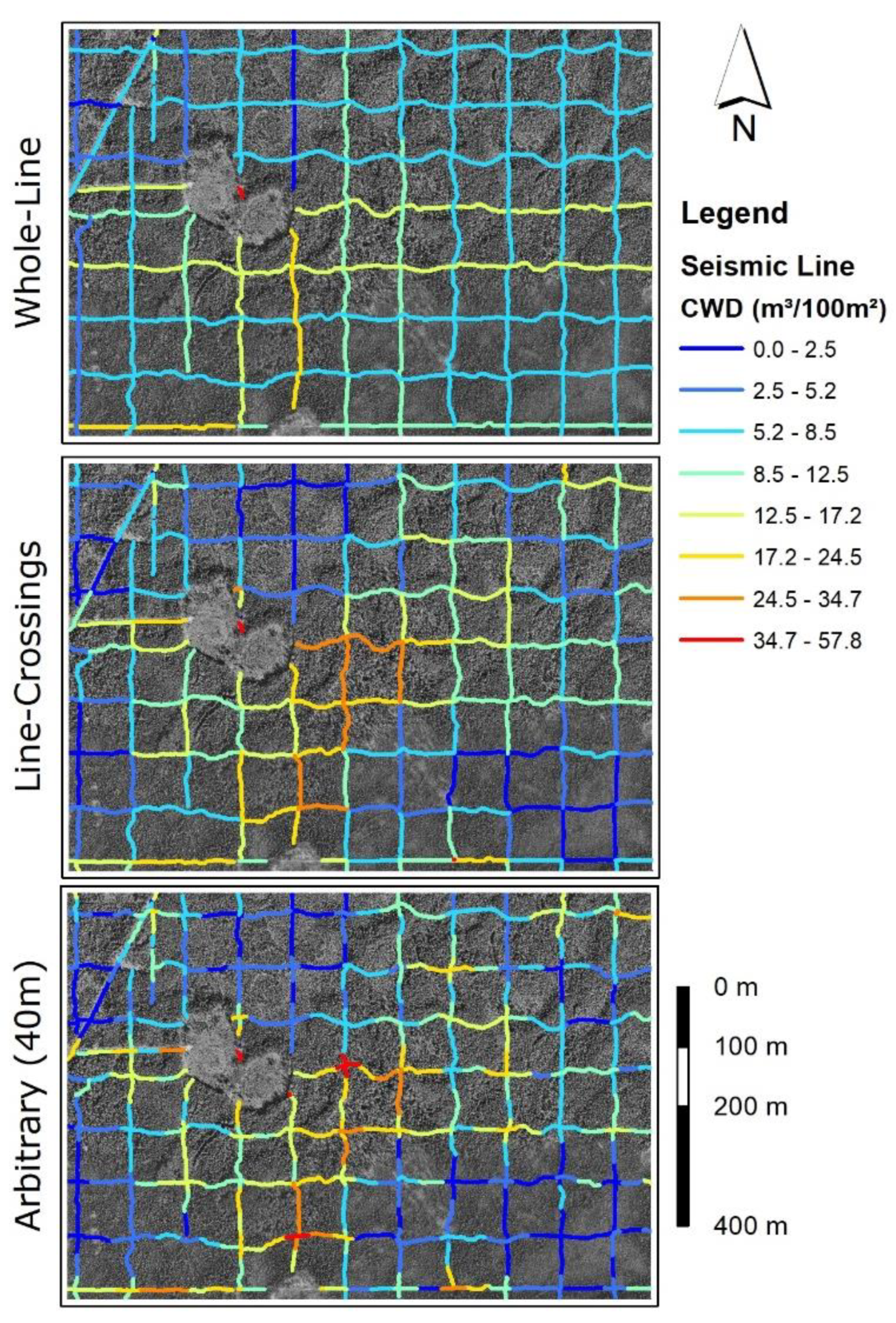
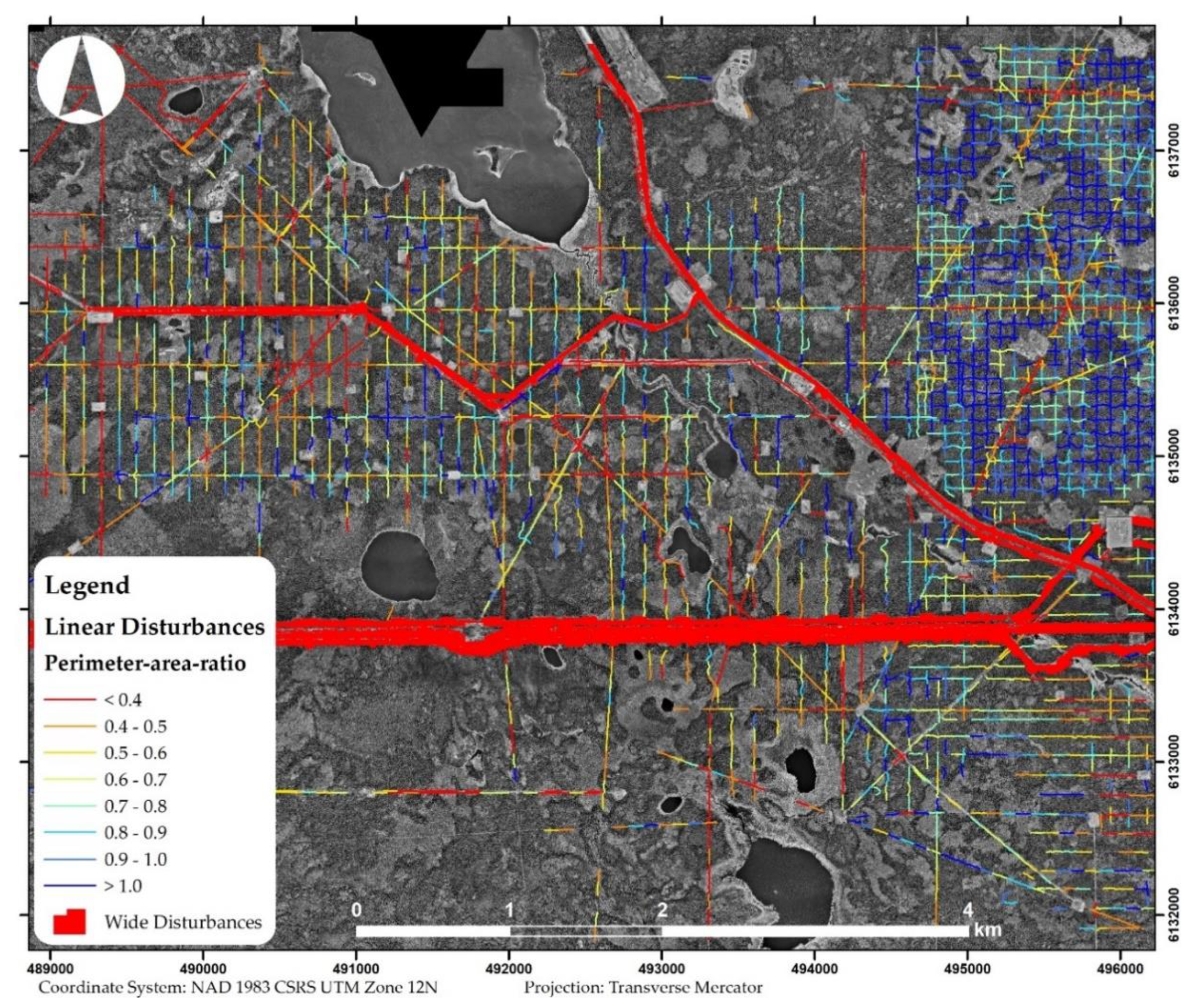
2.2.4. Line Attribution
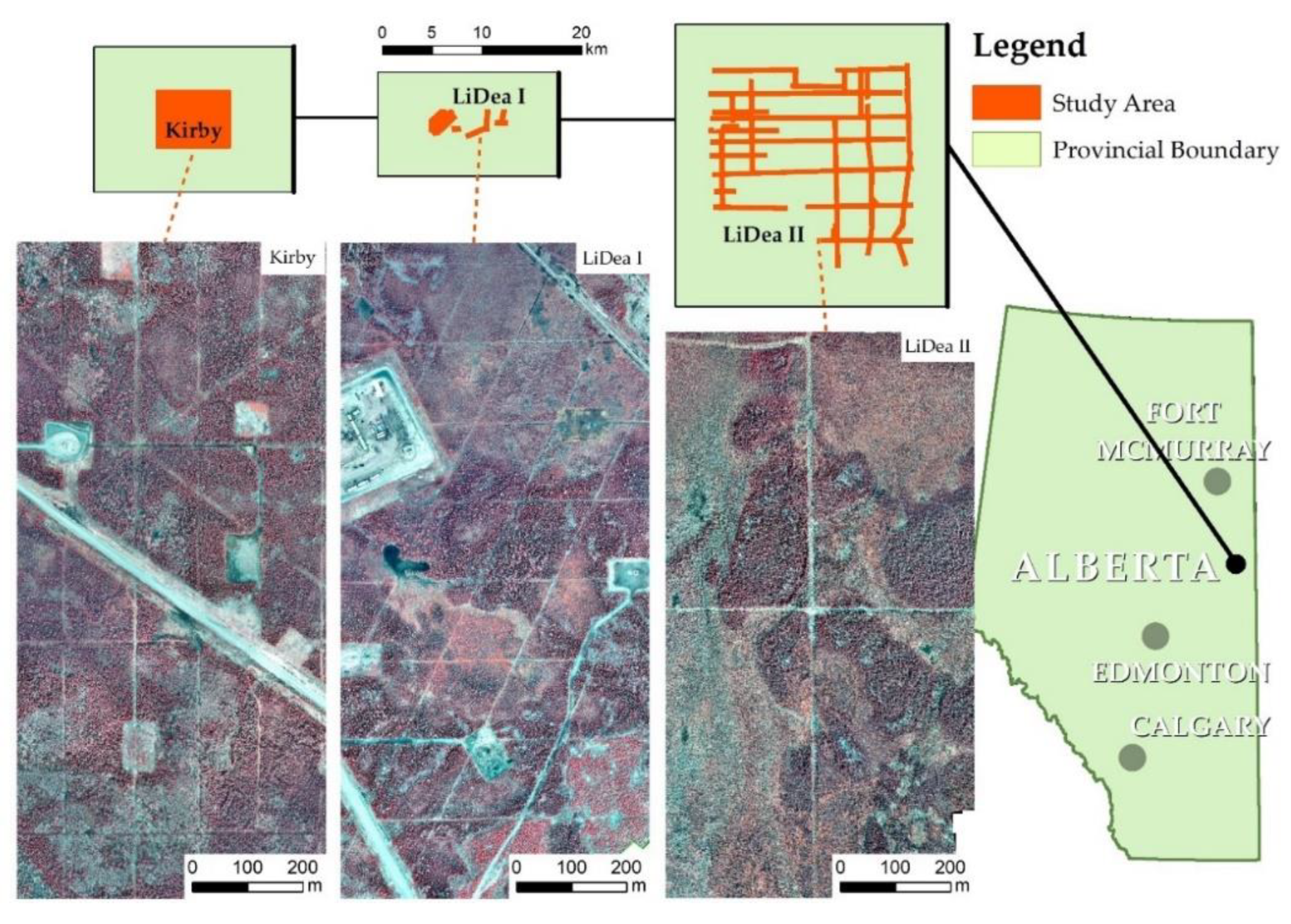
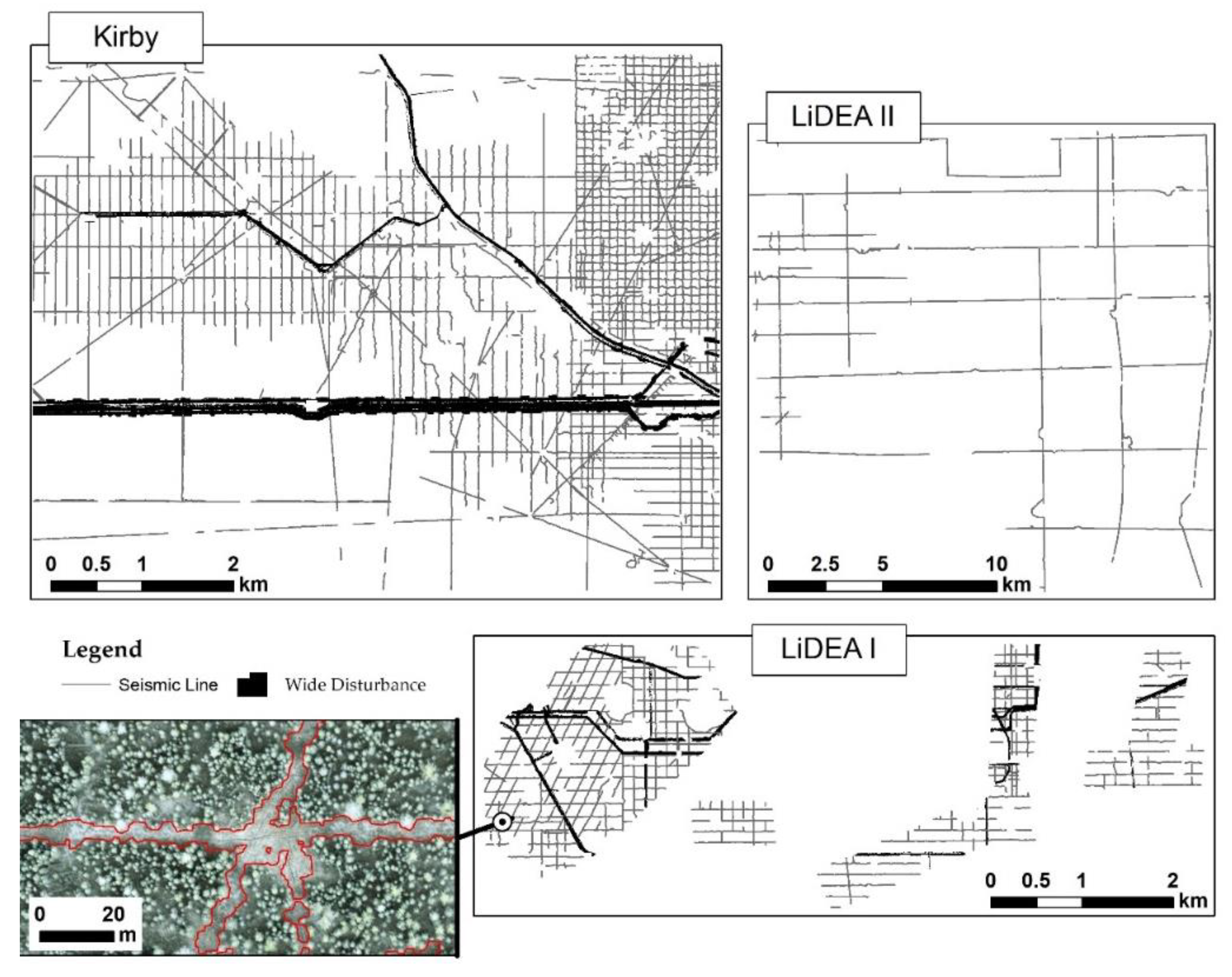
2.3. Study Area
2.3.1. Remote Sensing Data
2.3.2. Reference Data
Centerline Location Reference Samples
Line Width Reference Samples
2.4. Accuracy and Statistical Analyses
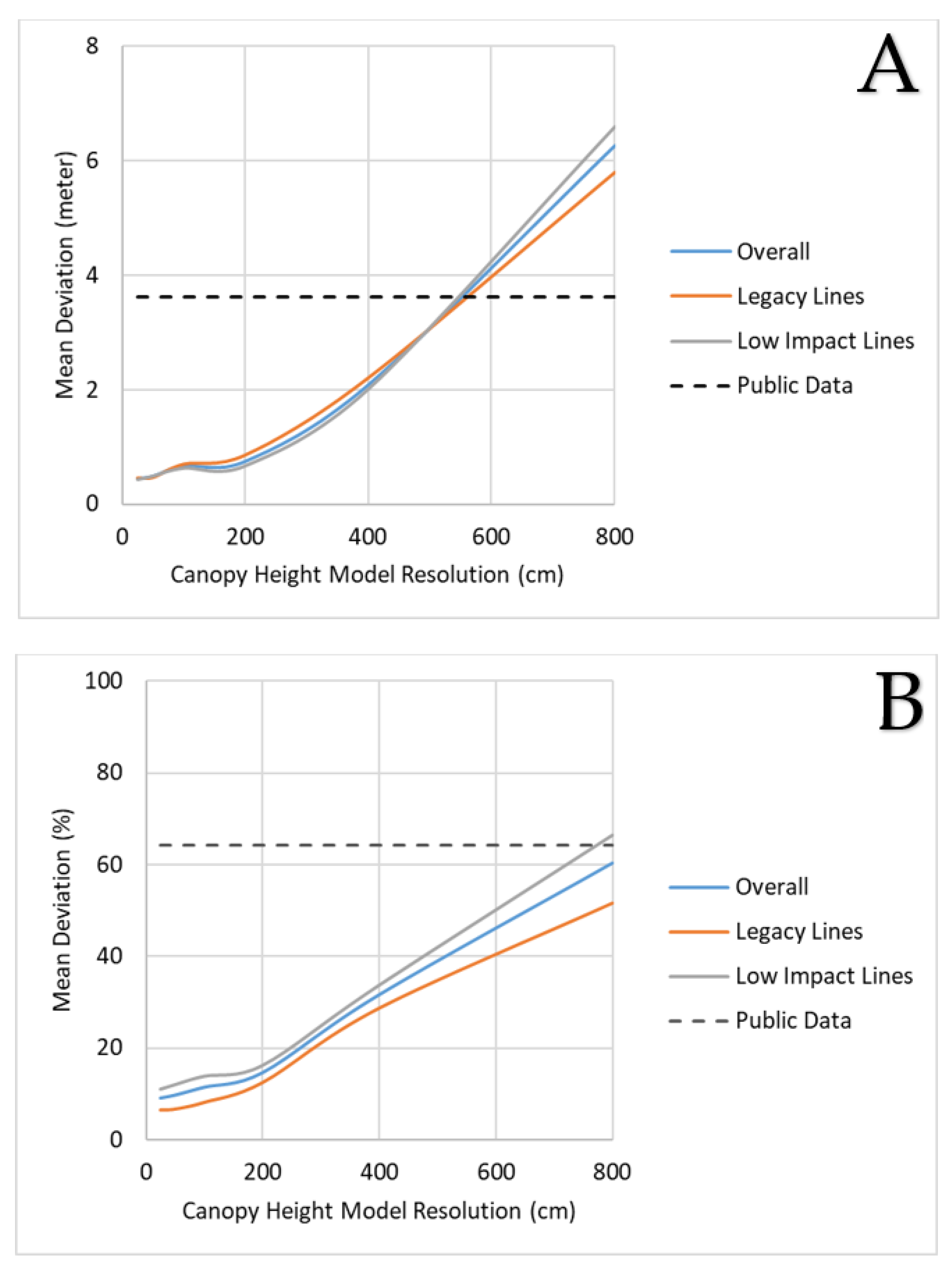
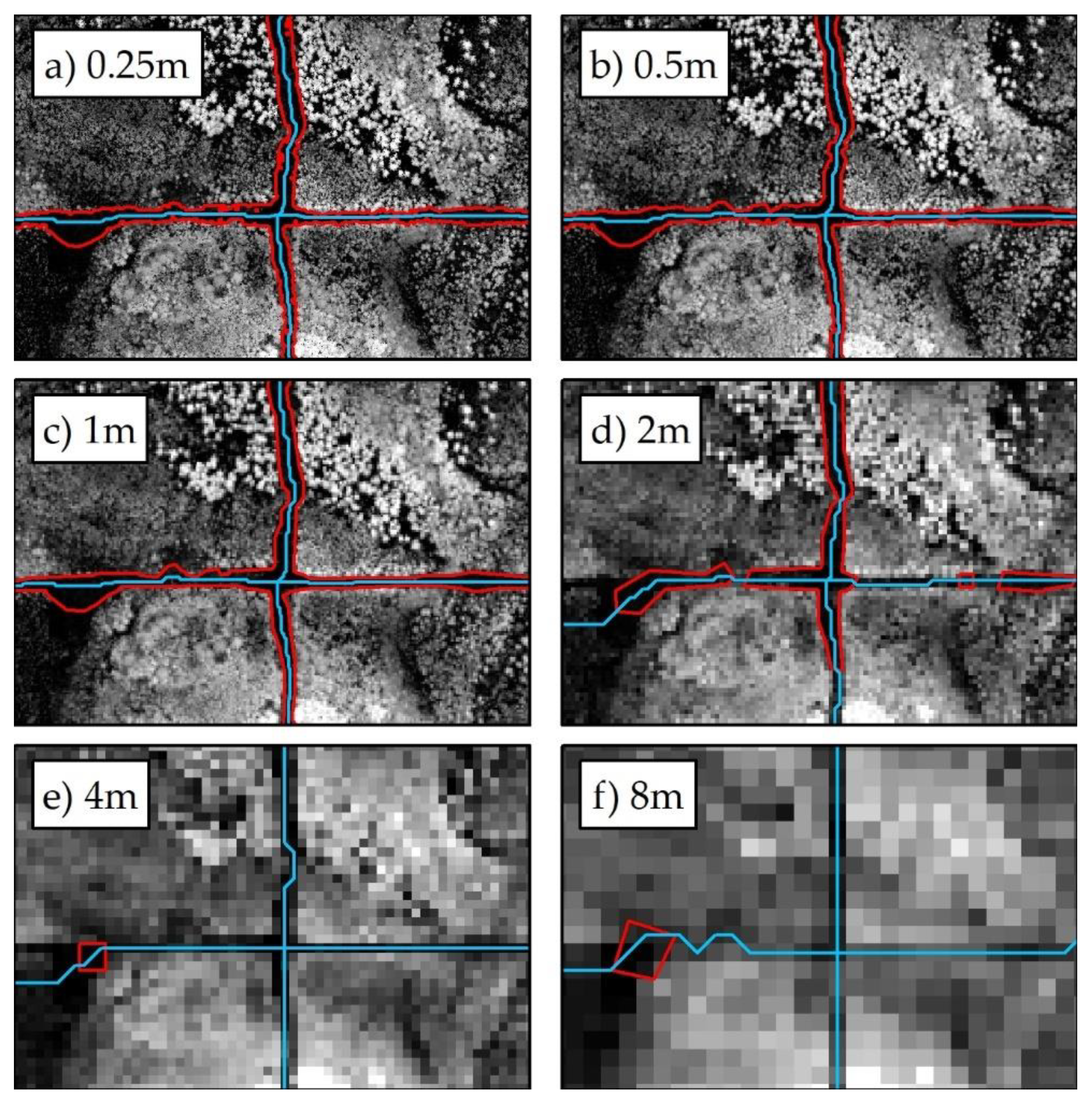
2.4.1. Centerline Spatial Error Assessment
2.4.2. Line Footprint Width Assessment
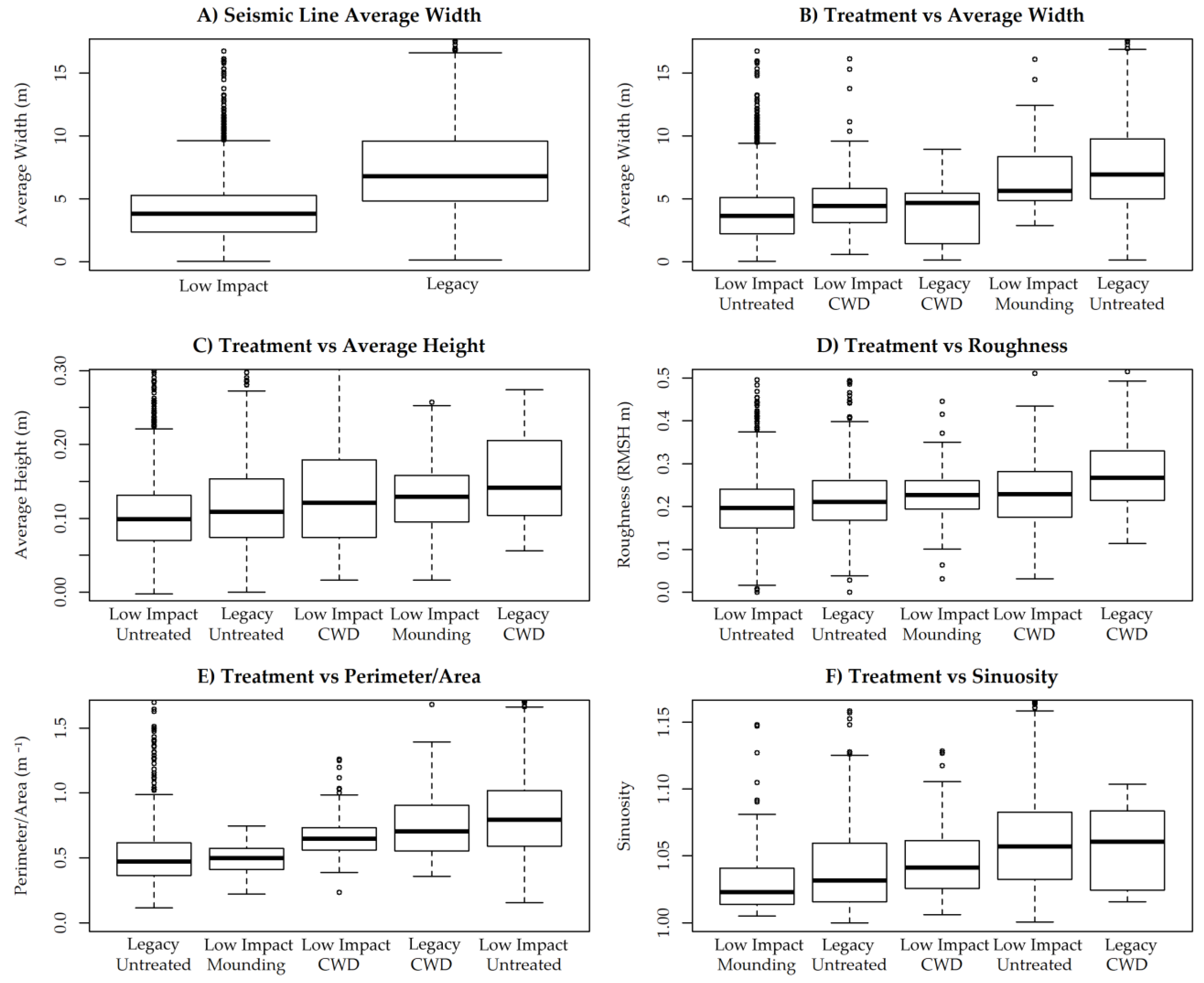
2.4.3. Line Treatment Types MANOVA
3. Results
3.1. Linear-feature Mapping Performance
3.2. Accuracy Assessments
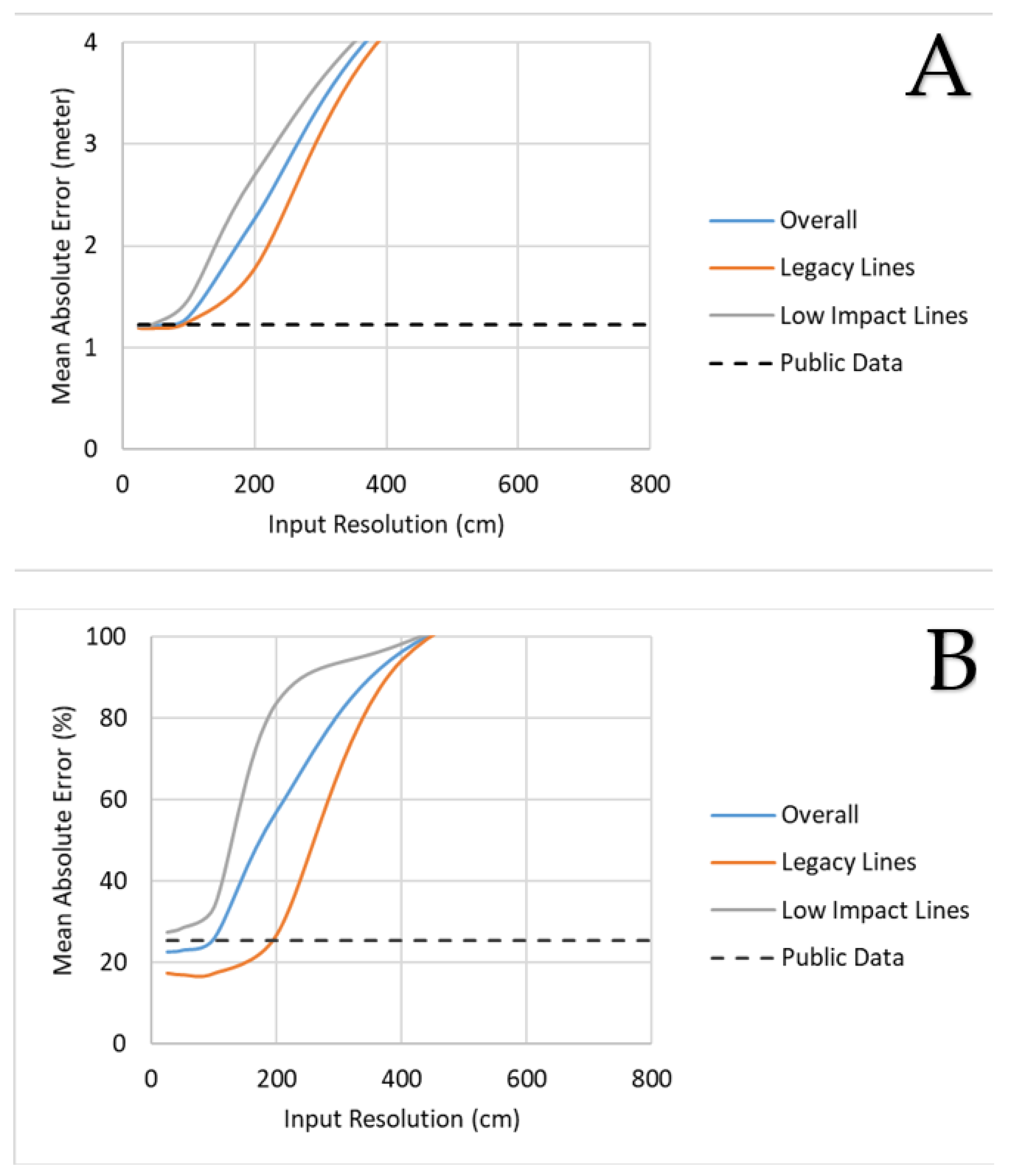
3.2.1. Centerline Spatial Error
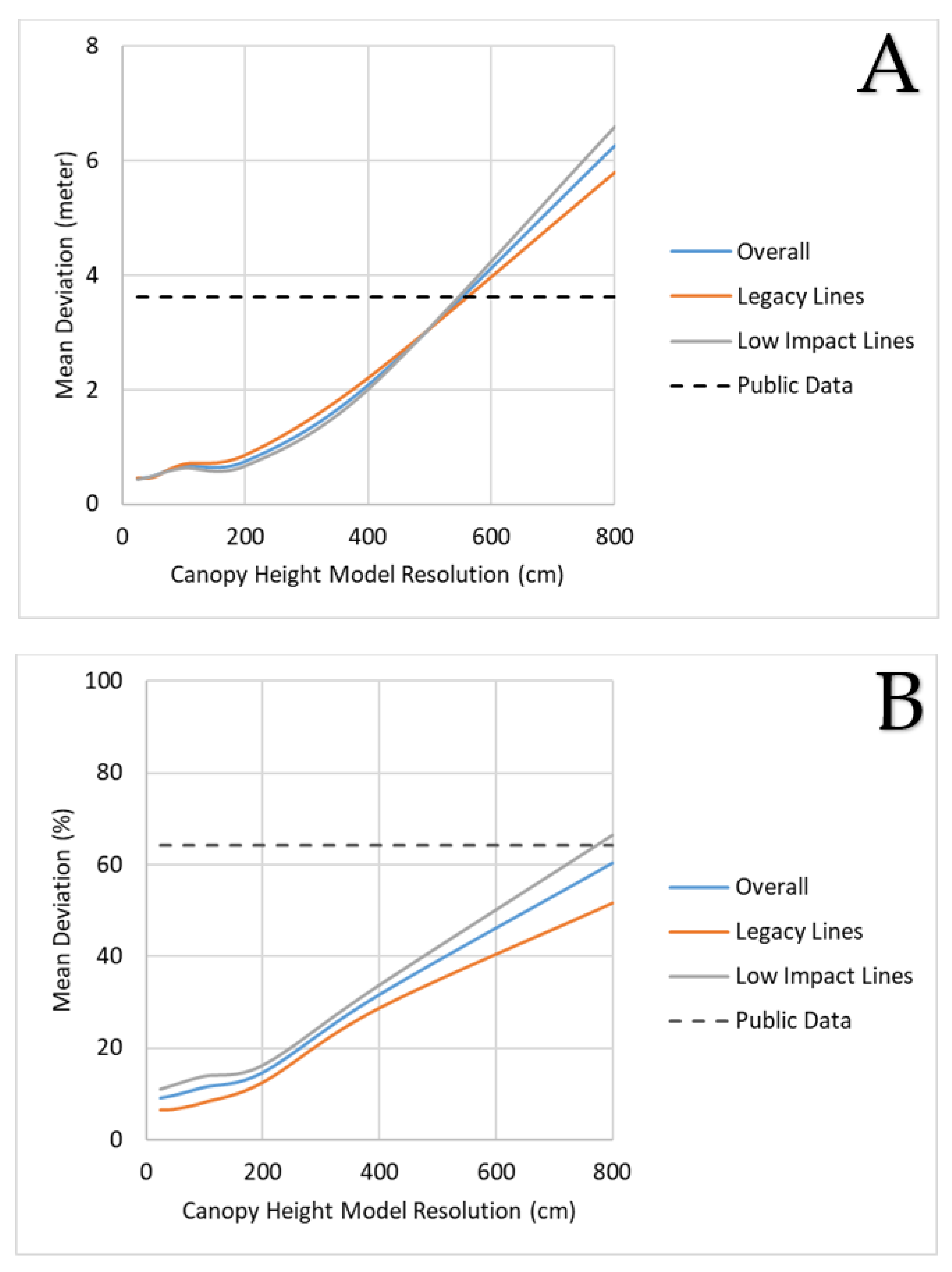
3.2.2. Line Footprint Width
3.3. Line Treatment Types ANOVA
4. Discussion
4.1. Contributions to Linear Disturbance Mapping Literature
4.2. Advantages of Semi-Automated Approach
4.3. Line Attribution
4.4. Limitations
4.5. Future Work
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Saunders, D.A.; Hobbs, R.J.; Margules, C.R. Biological consequences of ecosystem fragmentation—A review. Conserv. Biol. 1991, 5, 18–32. [Google Scholar] [CrossRef]
- Fahrig, L. Effects of habitat fragmentation on biodiversity. Annu. Rev. Ecol. Evol. Syst. 2003, 34, 487–515. [Google Scholar] [CrossRef] [Green Version]
- Potts, S.G.; Biesmeijer, J.C.; Kremen, C.; Neumann, P.; Schweiger, O.; Kunin, W.E. Global pollinator declines: Trends, impacts and drivers. Trends Ecol. Evol. 2010, 25, 345–353. [Google Scholar] [CrossRef] [PubMed]
- Dabros, A.; Pyper, M.; Castilla, G. Seismic lines in the boreal and arctic ecosystems of North America: Environmental impacts, challenges, and opportunities. Environ. Rev. 2018, 26, 214–229. [Google Scholar] [CrossRef] [Green Version]
- Lee, P.; Boutin, S. Persistence and developmental transition of wide seismic lines in the western Boreal Plains of Canada. J. Environ. Manag. 2006, 78, 240–250. [Google Scholar] [CrossRef]
- Van Rensen, C.K.; Nielsen, S.E.; White, B.; Vinge, T.; Lieffers, V.J. Natural regeneration of forest vegetation on legacy seismic lines in boreal habitats in Alberta’s oil sands region. Biol. Conserv. 2015, 184, 127–135. [Google Scholar] [CrossRef] [Green Version]
- Dawe, C.A.; Filicetti, A.T.; Nielsen, S.E. Effects of Linear Disturbances and Fire Severity on Velvet Leaf Blueberry Abundance, Vigor, and Berry Production in Recently Burned Jack Pine Forests. Forests 2017, 8, 398. [Google Scholar] [CrossRef] [Green Version]
- Roberts, D.; Ciuti, S.; Barber, Q.E.; Willier, C.; Nielsen, S.E. Accelerated seed dispersal along linear disturbances in the Canadian oil sands region. Sci. Rep. 2018, 8, 1–9. [Google Scholar] [CrossRef]
- Filicetti, A.T.; Nielsen, S.E. Fire and forest recovery on seismic lines in sandy upland jack pine (Pinus banksiana) forests. For. Ecol. Manag. 2018, 421, 32–39. [Google Scholar] [CrossRef]
- Filicetti, A.T.; Cody, M.; Nielsen, S.E. Caribou Conservation: Restoring Trees on Seismic Lines in Alberta, Canada. Forests 2019, 10, 185. [Google Scholar] [CrossRef] [Green Version]
- Finnegan, L.; MacNearney, D.; Pigeon, K.E. Divergent patterns of understory forage growth after seismic line exploration: Implications for caribou habitat restoration. For. Ecol. Manag. 2018, 409, 634–652. [Google Scholar] [CrossRef]
- Dabros, A.; Hammond, H.E.J.; Pinzon, J.; Pinno, B.; Langor, D. Edge influence of low-impact seismic lines for oil exploration on upland forest vegetation in northern Alberta (Canada). For. Ecol. Manag. 2017, 400, 278–288. [Google Scholar] [CrossRef]
- Stern, E.R.; Riva, F.; Nielsen, S.E. Effects of Narrow Linear Disturbances on Light and Wind Patterns in Fragmented Boreal Forests in Northeastern Alberta. Forests 2018, 9, 486. [Google Scholar] [CrossRef] [Green Version]
- Fisher, J.T.; Burton, A.C. Wildlife winners and losers in an oil sands landscape. Front. Ecol. Environ. 2018, 16, 323–328. [Google Scholar] [CrossRef]
- Riva, F.; Acorn, J.H.; Nielsen, S.E. Localized disturbances from oil sands developments increase butterfly diversity and abundance in Alberta’s boreal forests. Biol. Conserv. 2018, 217, 173–180. [Google Scholar] [CrossRef]
- Mahon, C.L.; Holloway, G.L.; Bayne, E.M.; Toms, J.D. Additive and interactive cumulative effects on boreal landbirds: Winners and losers in a multi-stressor landscape. Ecol. Appl. 2019, 29, e01895. [Google Scholar] [CrossRef]
- Bocking, E.; Cooper, D.J.; Price, J. Using tree ring analysis to determine impacts of a road on a boreal peatland. For. Ecol. Manag. 2017, 404, 24–30. [Google Scholar] [CrossRef]
- Lovitt, J.; Rahman, M.; Saraswati, S.; McDermid, G.; Strack, M.; Xu, B. UAV Remote Sensing Can Reveal the Effects of Low-Impact Seismic Lines on Surface Morphology, Hydrology and Methane (CH4) Release in a Boreal Treed Bog. J. Geophys. Res. Biogeosci. 2018, 123, 1117–1129. [Google Scholar] [CrossRef] [Green Version]
- Saraswati, S.; Petrone, R.; Rahman, R.; McDermid, G.; Xu, B.; Strack, M. Hydrological effects of resource-access road crossings on boreal forested peatlands. J. Hydrol. 2020, 584, 124748. [Google Scholar] [CrossRef]
- Strack, M.; Softa, D.; Bird, M.; Xu, B. Impact of winter roads on boreal peatland carbon exchange. Glob. Chang. Biol. 2018, 24, E201–E212. [Google Scholar] [CrossRef]
- Strack, M.; Hayne, S.; Lovitt, J.; McDermid, G.J.; Rahman, M.M.; Saraswati, S.; Xu, B. Petroleum exploration increases methane emissions from northern peatlands. Nat. Commun. 2019, 10, 2804. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Quackenbush, L.J. A review of techniques for extracting linear features from imagery. Photogramm. Eng. Remote Sens. 2004, 70, 1383–1392. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Guindon, B.; Lantz, N.; Shipman, T.; Chao, D.; Raymond, D. Quantification of anthropogenic and natural changes in oil sands mining infrastructure land based on RapidEye and SPOT5. Int. J. Appl. Earth Obs. Geoinf. 2014, 29, 31–43. [Google Scholar] [CrossRef]
- Li, J.Y.; Hu, Q.W.; Ai, M.Y. Unsupervised road extraction via a Gaussian mixture model with object-based features. Int. J. Remote Sens. 2018, 39, 2421–2440. [Google Scholar] [CrossRef]
- Dashpurev, B.; Bendix, J.; Lehnert, L.W. Monitoring Oil Exploitation Infrastructure and Dirt Roads with Object-Based Image Analysis and Random Forest in the Eastern Mongolian Steppe. Remote Sens. 2020, 12, 144. [Google Scholar] [CrossRef] [Green Version]
- Katartzis, A.; Sahli, H.; Pizurica, V.; Cornelis, J. A model-based approach to the automatic extraction of linear features from airborne images. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2073–2079. [Google Scholar] [CrossRef]
- Zhu, C.; Shi, W.; Pesaresi, M.; Liu, L.; Chen, X.; King, B. The recognition of road network from high-resolution satellite remotely sensed data using image morphological characteristics. Int. J. Remote Sens. 2005, 26, 5493–5508. [Google Scholar] [CrossRef]
- Pezeshk, A.; Tutwiler, R.L. Automatic Feature Extraction and Text Recognition from Scanned Topographic Maps. IEEE Trans. Geosci. Remote Sens. 2011, 49, 5047–5063. [Google Scholar] [CrossRef]
- Liu, B.; Wu, H.Y.; Wang, Y.D.; Liu, W.M. Main Road Extraction from ZY-3 Grayscale Imagery Based on Directional Mathematical Morphology and VGI Prior Knowledge in Urban Areas. PLoS ONE 2015, 10, e0138071. [Google Scholar] [CrossRef] [Green Version]
- Gruen, A.; Li, H.H. Semi-automatic linear feature extraction by dynamic programming and LSB-Snakes. Photogramm. Eng. Remote Sens. 1997, 63, 985–995. [Google Scholar]
- Lin, X.G.; Zhang, J.X.; Liu, Z.J.; Shen, J.; Duan, M.Y. Semi-automatic extraction of road networks by least squares interlaced template matching in urban areas. Int. J. Remote Sens. 2011, 32, 4943–4959. [Google Scholar] [CrossRef]
- Jing, R.; Gong, Z.N.; Zhu, W.D.; Guan, H.L.; Zhao, W.J. Island Road Centerline Extraction Based on a Multiscale United Feature. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3940–3953. [Google Scholar] [CrossRef]
- Duda, R.O.; Hart, P.E. Use of the Hough Transformation to Detect Lines and Curves in Pictures 5. Commun. Assoc. Comput. Mach. 1972, 15, 11–15. [Google Scholar] [CrossRef]
- Copeland, A.C.; Ravichandran, G.; Trivedi, M.M. Localized radon transform-based detection of ship wakes in SAR images. IEEE Trans. Geosci. Remote Sens. 1995, 33, 35–45. [Google Scholar] [CrossRef]
- Karnieli, A.; Meisels, A.; Fisher, L.; Arkin, Y. Automatic extraction and evaluation of geological linear features from digital remote sensing data using a Hough transform. Photogramm. Eng. Remote Sens. 1996, 62, 525–531. [Google Scholar]
- Dell’Acqua, F.; Gamba, P. Detection of urban structures in SAR images by robust fuzzy clustering algorithms: The example of street tracking. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2287–2297. [Google Scholar] [CrossRef]
- Murashkin, D.; Spreen, G. IEEE Sea ice leads detected from Sentinel-1 SAR images. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2019), Yokohama, Japan, 28 July–2 August 2019; pp. 174–177. [Google Scholar]
- Habib, A.F.; Alruzouq, R.I. Line-based modified iterated Hough transform for automatic registration of multi-source imagery. Photogramm. Rec. 2004, 19, 5–20. [Google Scholar] [CrossRef]
- Al-Ruzouq, R.I. Data fusion of multi-source imagery based on linear features registration. Int. J. Remote Sens. 2010, 31, 5011–5021. [Google Scholar] [CrossRef]
- Al-Ruzouq, R.I.; Habib, A.F. Linear features for automatic registration and reliable change detection of multi-source imagery. J. Spat. Sci. 2012, 57, 51–64. [Google Scholar] [CrossRef]
- Hu, X.Y.; Zhang, Z.X.; Tao, C.V. A robust method for semi-automatic extraction of road centerlines using a piecewise parabolic model and least square template matching. Photogramm. Eng. Remote Sens. 2004, 70, 1393–1398. [Google Scholar] [CrossRef]
- Hinz, S.; Baumgartner, A. Automatic extraction of urban road networks from multi-view aerial imagery. ISPRS J. Photogramm. Remote Sens. 2003, 58, 83–98. [Google Scholar] [CrossRef]
- Hui, Z.Y.; Hu, Y.J.; Jin, S.G.; Yevenyo, Y.Z. Road centerline extraction from airborne LiDAR point cloud based on hierarchical fusion and optimization. ISPRS J. Photogramm. Remote Sens. 2016, 118, 22–36. [Google Scholar] [CrossRef]
- Zhang, Z.Q.; Zhang, X.C.; Sun, Y.; Zhang, P.C. Road Centerline Extraction from Very-High-Resolution Aerial Image and LiDAR Data Based on Road Connectivity. Remote Sens. 2018, 10, 1284. [Google Scholar] [CrossRef] [Green Version]
- Hu, X.Y.; Li, Y.J.; Shan, J.; Zhang, J.Q.; Zhang, Y.J. Road Centerline Extraction in Complex Urban Scenes From LiDAR Data Based on Multiple Features. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7448–7456. [Google Scholar]
- Tejenaki, S.A.K.; Ebadi, H.; Mohammadzadeh, A. A new hierarchical method for automatic road centerline extraction in urban areas using LIDAR data. Adv. Space Res. 2019, 64, 1792–1806. [Google Scholar] [CrossRef]
- Clode, S.; Rottensteiner, F.; Kootsookos, P.; Zelniker, E. Detection and vectorization of roads from lidar data. Photogramm. Eng. Remote Sens. 2007, 73, 517–535. [Google Scholar] [CrossRef] [Green Version]
- Soilán, M.; Truong-Hong, L.; Riveiro, B.; Laefer, D. Automatic extraction of road features in urban environments using dense ALS data. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 226–236. [Google Scholar] [CrossRef]
- Liu, L.; Lim, S. A framework of road extraction from airborne lidar data and aerial imagery. J. Spat. Sci. 2016, 61, 263–281. [Google Scholar] [CrossRef]
- Grote, A.; Heipke, C.; Rottensteiner, F. Road Network Extraction in Suburban Areas. Photogramm. Rec. 2012, 26, 8–28. [Google Scholar] [CrossRef]
- Sameen, M.I.; Pradhan, B. A Simplified Semi-Automatic Technique for Highway Extraction from High-Resolution Airborne LiDAR Data and Orthophotos. J. Indian Soc. Remote Sens. 2017, 45, 395–405. [Google Scholar] [CrossRef]
- Hyyppa, J.; Hyyppa, H.; Leckie, D.; Gougeon, F.; Yu, X.; Maltamo, M. Review of methods of small-footprint airborne laser scanning for extracting forest inventory data in boreal forests. Int. J. Remote Sens. 2008, 29, 1339–1366. [Google Scholar] [CrossRef]
- Li, H.; Yezzi, A. Vessels as 4-d curves: Global minimal 4-d paths to extract 3-d tubular surfaces and centerlines. IEEE Trans. Med. Imaging 2007, 26, 1213–1223. [Google Scholar] [CrossRef] [PubMed]
- Benmansour, F.; Cohen, L.D. Tubular Structure Segmentation Based on Minimal Path Method and Anisotropic Enhancement. Int. J. Comput. Vis. 2011, 92, 192–210. [Google Scholar] [CrossRef] [Green Version]
- Zhao, F.J.; Chen, Y.R.; Hou, Y.Q.; He, X.W. Segmentation of blood vessels using rule-based and machine-learning-based methods: A review. Multimed. Syst. 2019, 25, 109–118. [Google Scholar] [CrossRef]
- Türetken, E.; Benmansour, F.; Fua, P. Automated Reconstruction of Tree Structures using Path Classifiers and Mixed Integer Programming. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Providence, RI, USA, 16–21 June 2012; pp. 566–573. [Google Scholar]
- Wegner, J.D.; Montoya-Zegarra, J.A.; Schindler, K. Road networks as collections of minimum cost paths. ISPRS J. Photogramm. Remote Sens. 2015, 108, 128–137. [Google Scholar] [CrossRef]
- Applied Geospatial Research Group. Forest Line Mapper: A Tool for Enhanced Delineation and Attribution of Linear Disturbances in Forests; University of Calgary: Calgary, AB, Canada, 2020. [Google Scholar] [CrossRef]
- Douglas, D.H. Least-cost path in GIS using an accumulated cost surface and slopelines. Cartogr. Int. J. Geogr. Inf. Geovis. 1994, 31, 37–51. [Google Scholar] [CrossRef]
- ESRI. Understanding Cost Distance Analysis. Available online: https://pro.arcgis.com/en/pro-app/tool-reference/spatial-analyst/understanding-cost-distance-analysis.htm (accessed on 1 August 2020).
- LaRue, M.A.; Nielsen, C.K. Modelling potential dispersal corridors for cougars in midwestern North America using least-cost path methods. Ecol. Model. 2008, 212, 372–381. [Google Scholar] [CrossRef]
- Wang, I.J.; Savage, W.K.; Bradley Shaffer, H. Landscape genetics and least-cost path analysis reveal unexpected dispersal routes in the California tiger salamander (Ambystoma californiense). Mol. Ecol. 2009, 18, 1365–1374. [Google Scholar] [CrossRef]
- Collischonn, W.; Pilar, J.V. A direction dependent least-cost-path algorithm for roads and canals. Int. J. Geogr. Inf. Sci. 2000, 14, 397–406. [Google Scholar] [CrossRef]
- Yu, C.; Lee, J.A.Y.; Munro-Stasiuk, M.J. Extensions to least-cost path algorithms for roadway planning. Int. J. Geogr. Inf. Sci. 2003, 17, 361–376. [Google Scholar] [CrossRef]
- Metz, M.; Mitasova, H.; Harmon, R.S. Efficient Extraction of Drainage Networks from Massive, Radar-Based Elevation Models with Least Cost Path Search; ULM UNIV (GERMANY FR): Ulm, Germany, 2011. [Google Scholar]
- Stevenson, C.J.; Filicetti, A.T.; Nielsen, S.E. High Precision Altimeter Demonstrates Simplification and Depression of Microtopography on Seismic Lines in Treed Peatlands. Forests 2019, 10, 295. [Google Scholar] [CrossRef]
- Queiroz, G.L.; McDermid, G.J.; Linke, J.; Hopkinson, C.; Kariyeva, J. Estimating Coarse Woody Debris Volume Using Image Analysis and Multispectral LiDAR. Forests 2020, 11, 141. [Google Scholar] [CrossRef] [Green Version]
- Downing, D.; Pettapiece, W. Natural Regions Committee—Natural Regions and Subregions of Alberta. Available online: https://albertaparks.ca/media/2942026/nrsrcomplete_may_06.pdf (accessed on 16 December 2020).
- ABMI. Human Footprint Products. Available online: https://www.abmi.ca/home/data-analytics/da-top/da-product-overview/Human-Footprint-Products.html (accessed on 1 August 2020).
- Hallsby, G.; Orlander, G. A comparison of mounding and inverting to establish Norway spruce on podzoilc soils in Sweden. Forestry 2004, 77, 107–117. [Google Scholar] [CrossRef] [Green Version]
- Environment Canada. Recovery Strategy for the Woodland Caribou (Rangifer tarandus caribou), Boreal Population, in Canada [Proposed]. Available online: https://www.registrelep-sararegistry.gc.ca/virtual_sara/files/plans/rs_boreal_caribou_revised_0811_eng.pdf (accessed on 16 December 2020).
- Dickie, M.; Serrouya, R.; McNay, R.S.; Boutin, S. Faster and farther: Wolf movement on linear features and implications for hunting behaviour. J. Appl. Ecol. 2017, 54, 253–263. [Google Scholar] [CrossRef]
- He, Y.; Franklin, S.E.; Guo, X.; Stenhouse, G.B. Object-oriented classification of multi-resolution images for the extraction of narrow linear forest disturbance. Remote Sens. Lett. 2011, 2, 147–155. [Google Scholar] [CrossRef] [Green Version]
- Finnegan, L.; Pigeon, K.E.; MacNearney, D. Predicting patterns of vegetation recovery on seismic lines: Informing restoration based on understory species composition and growth. For. Ecol. Manag. 2019, 446, 175–192. [Google Scholar] [CrossRef]
- Ahuja, R.K.; Mehlhorn, K.; Orlin, J.; Tarjan, R.E. Faster algorithms for the shortest path problem. J. ACM (JACM) 1990, 37, 213–223. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Line Attribute | Description | Units |
|---|---|---|
| Length | Line length from start to end of segment | meters |
| Bearing | Clockwise angle between north and line joining first and last segment vertices | degrees |
| Direction | Quadrant direction closest to line bearing | text label |
| Sinuosity | Line length divided by Euclidean distance from start to end of segment | unitless |
| Area | Area of footprint polygon surrounding line | meters squared |
| Perimeter | Perimeter of footprint polygon surrounding line | meters |
| Average Width | Average width of footprint polygon surrounding line | meters |
| Perimeter/Area | Perimeter-area ratio of footprint polygon surrounding line | meters−1 |
| Average Height | Average height of CHM cells within surrounding footprint polygon | meters |
| Volume | Area of CHM cell multiplied by sum of CHM values within surrounding footprint polygon | cubic meters |
| RMSH | Root-mean-squared height (RMSH) of CHM cell values within surrounding footprint polygon | meters |
| SL Length (km) | SL Footprint (ha) | WLD Footprint (ha) | Surveyed Area (ha) | Disturbance Area (%) | Processing Time (minutes) | |
|---|---|---|---|---|---|---|
| Kirby | 344.66 | 130.69 | 176.05 | 4,416.30 | 7 | 23.2 |
| LiDEA I | 86.25 | 37.44 | 54.77 | 827.88 | 11 | 8.7 |
| LiDEA II | 244.72 | 142.47 | 0.00 | 9,972.06 | 1 | 15.5 |
| ID | Group | Sample Size |
|---|---|---|
| 1 | Legacy CWD | 38 |
| 2 | Legacy Mounding * | 14 |
| 3 | Legacy Untreated | 734 |
| 4 | Low-impact CWD | 165 |
| 5 | Low-impact Mounding | 95 |
| 6 | Low-impact Untreated | 2024 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Queiroz, G.L.; McDermid, G.J.; Rahman, M.M.; Linke, J. The Forest Line Mapper: A Semi-Automated Tool for Mapping Linear Disturbances in Forests. Remote Sens. 2020, 12, 4176. https://doi.org/10.3390/rs12244176
Queiroz GL, McDermid GJ, Rahman MM, Linke J. The Forest Line Mapper: A Semi-Automated Tool for Mapping Linear Disturbances in Forests. Remote Sensing. 2020; 12(24):4176. https://doi.org/10.3390/rs12244176
Chicago/Turabian StyleQueiroz, Gustavo Lopes, Gregory J. McDermid, Mir Mustafizur Rahman, and Julia Linke. 2020. "The Forest Line Mapper: A Semi-Automated Tool for Mapping Linear Disturbances in Forests" Remote Sensing 12, no. 24: 4176. https://doi.org/10.3390/rs12244176
APA StyleQueiroz, G. L., McDermid, G. J., Rahman, M. M., & Linke, J. (2020). The Forest Line Mapper: A Semi-Automated Tool for Mapping Linear Disturbances in Forests. Remote Sensing, 12(24), 4176. https://doi.org/10.3390/rs12244176