In order to analyze the achievable positioning performance by multi-system and dual-frequency observations, especially the newly added L5/E5 frequency in Xiaomi Mi 8, the GNSS observations were processed by SPP and the time differenced filter for the cases of GPS-only (G), GPS/Galileo (GE), GPS/Galileo/QZSS (GEJ), and GPS/Galileo/QZSS/BeiDou (GEJC) with single-frequency and dual-frequency observations. The results are illustrated in
Figure 14 and
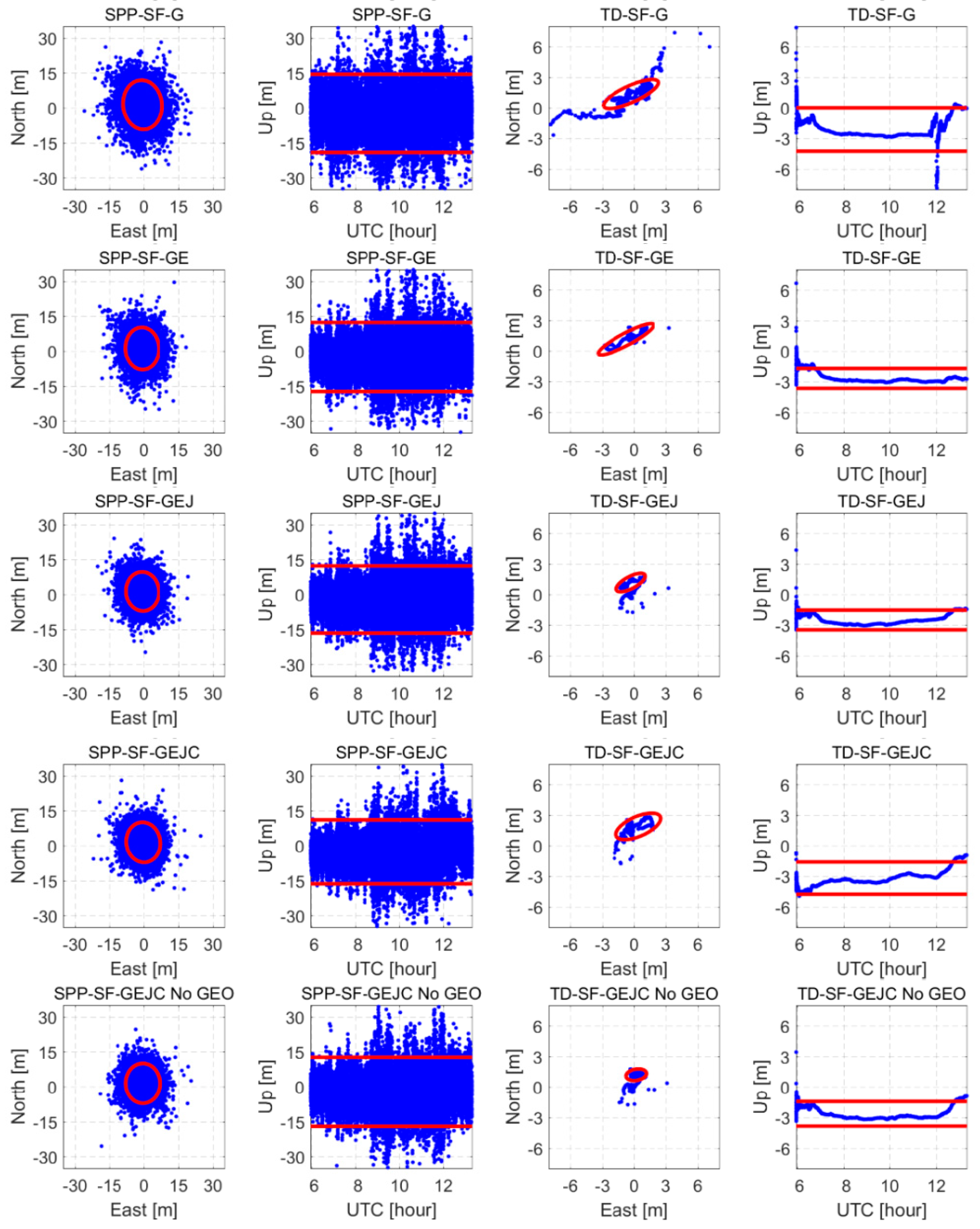
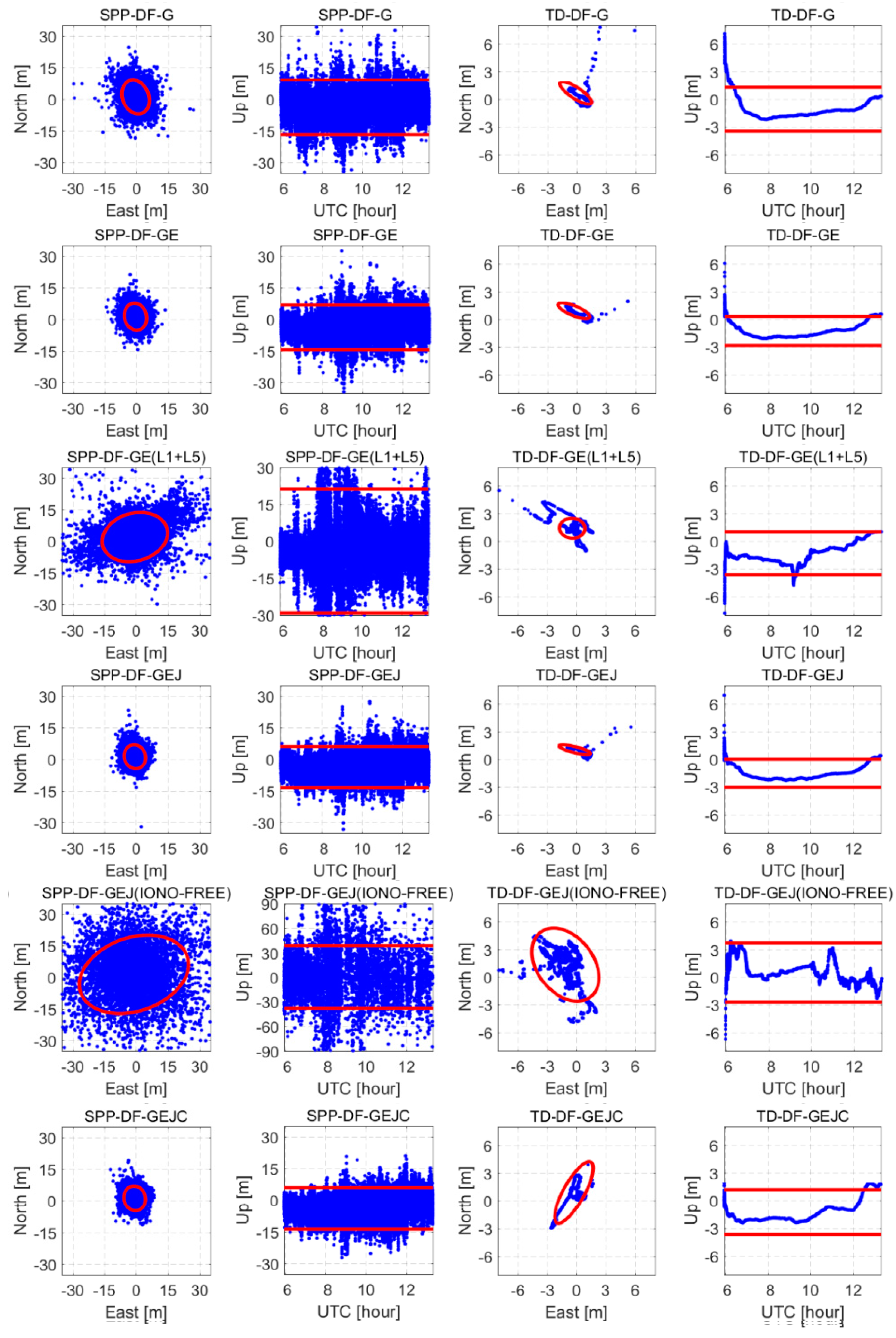
Figure 15. The horizontal position error scatters are shown in the odd columns while the vertical error scatters are shown in the even columns. The ellipses or straight lines inside each panel denote the 2σ domain of the scatters (95% confidence level). The smaller the ellipse is, the smaller the standard deviation, and the smoother the result. A comparison of the RMSs of the positioning errors is shown in
Table 4. We also calculated the solution availability, which is the percentage of solved positions that have a 3D error less than 20 m. Meanwhile, considering the advantage of the Galileo system and those GPS satellites with L5, we also conducted a positioning experiment using the Galileo and those GPS satellites with L5 measurements, labeled as ‘GE(L1+L5)’. Although,
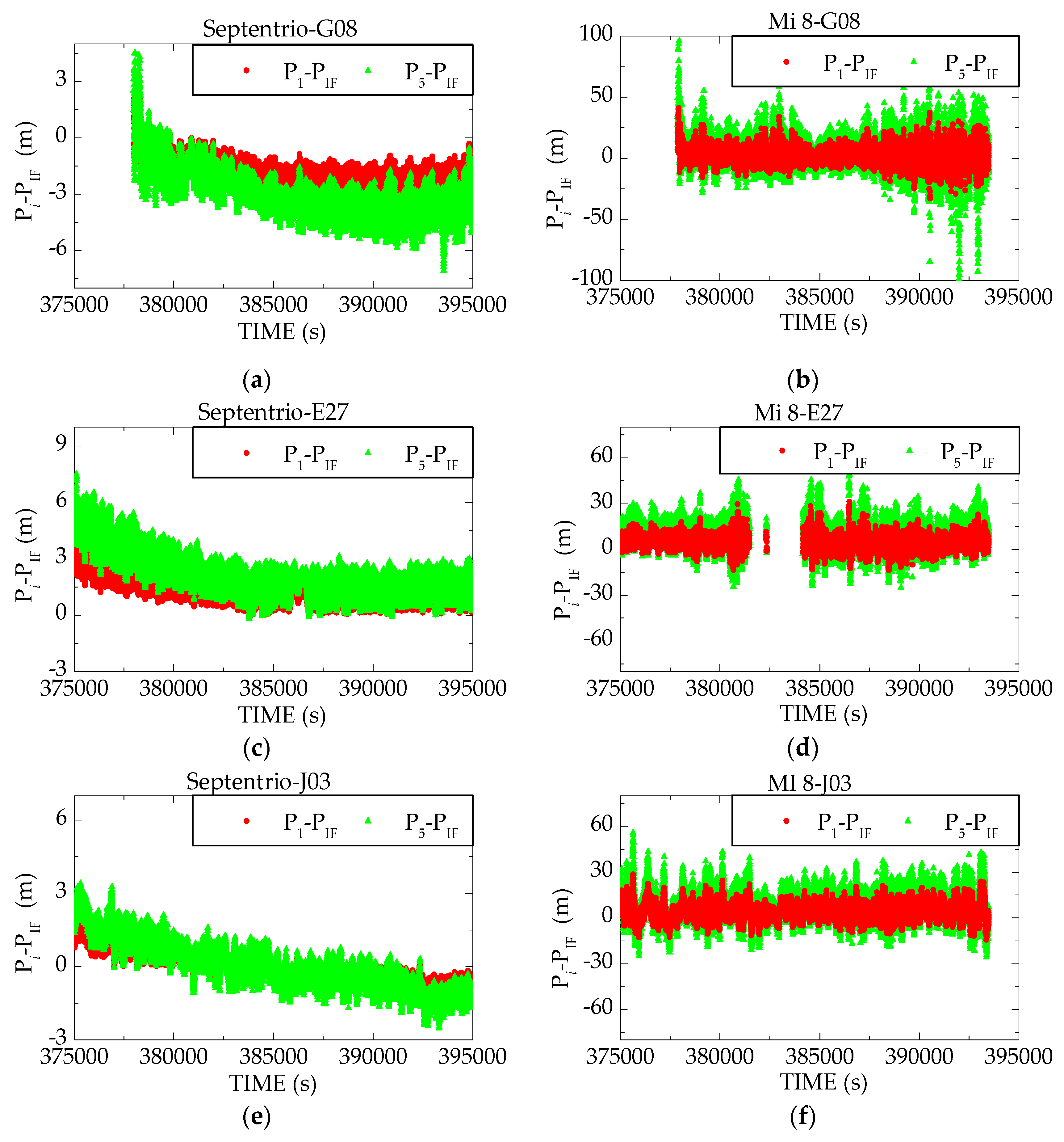
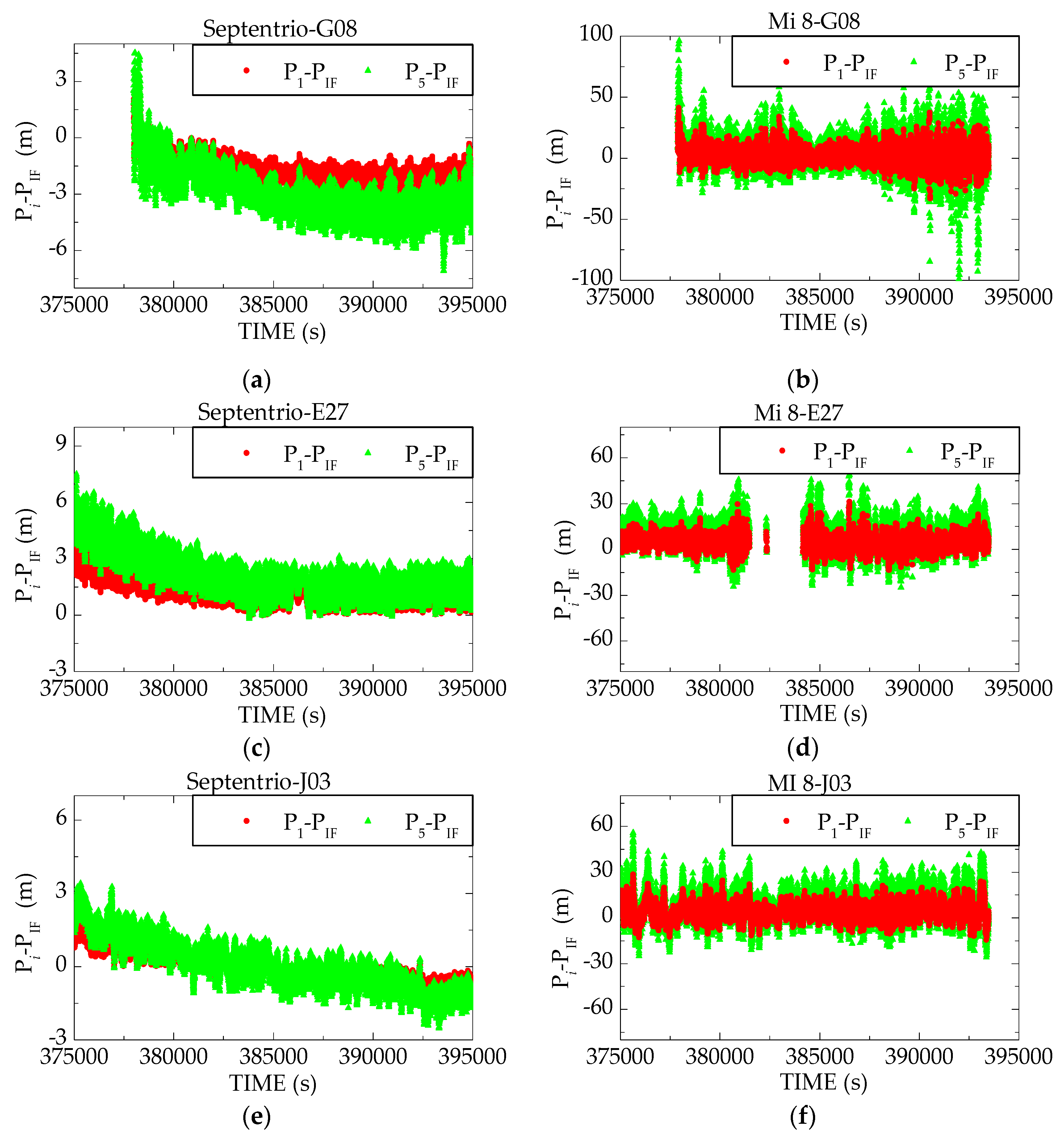
Figure 11 indicates that the ionosphere-free combination pseudorange may not be suitable for GNSS positioning with raw data from Xiaomi Mi 8 for its extreme large combined noise. Here we still conducted positing experiments with the dual-frequency ionosphere-free combined GPS, Galileo, and QZSS measurements to verify this, labeled as ‘GEJ(IONO-FREE)’.
It can be found that, for single-frequency SPP results, when the used navigation systems are increased, the RMS of the horizontal position errors decreases from 6 to 4 m, and 9 to 7 m for that of the vertical position errors. When using dual-frequency GNSS observations, the accuracy of SPP solutions improves slightly. The horizontal error RMS can be as good as 3.5 m, while the vertical error RMS is about 6.5 m. The increase in used navigation systems and inclusion of the second frequency have no obvious effect on the improvement of single-frequency SPP positioning accuracy, but the solution availability gets an effective boost. In the case of the single-frequency GEJC GNSS, the maximum solution availability can reach 98%. For dual-frequency GNSS cases, the positioning availability can be more than 99% when GPS and Galileo observations are used, and higher with the use of more systems. In short, the static data processing shows that, although the use of dual-frequency observations only has a slight improvement in the SPP accuracy, it strongly enhances the SPP solution availability.
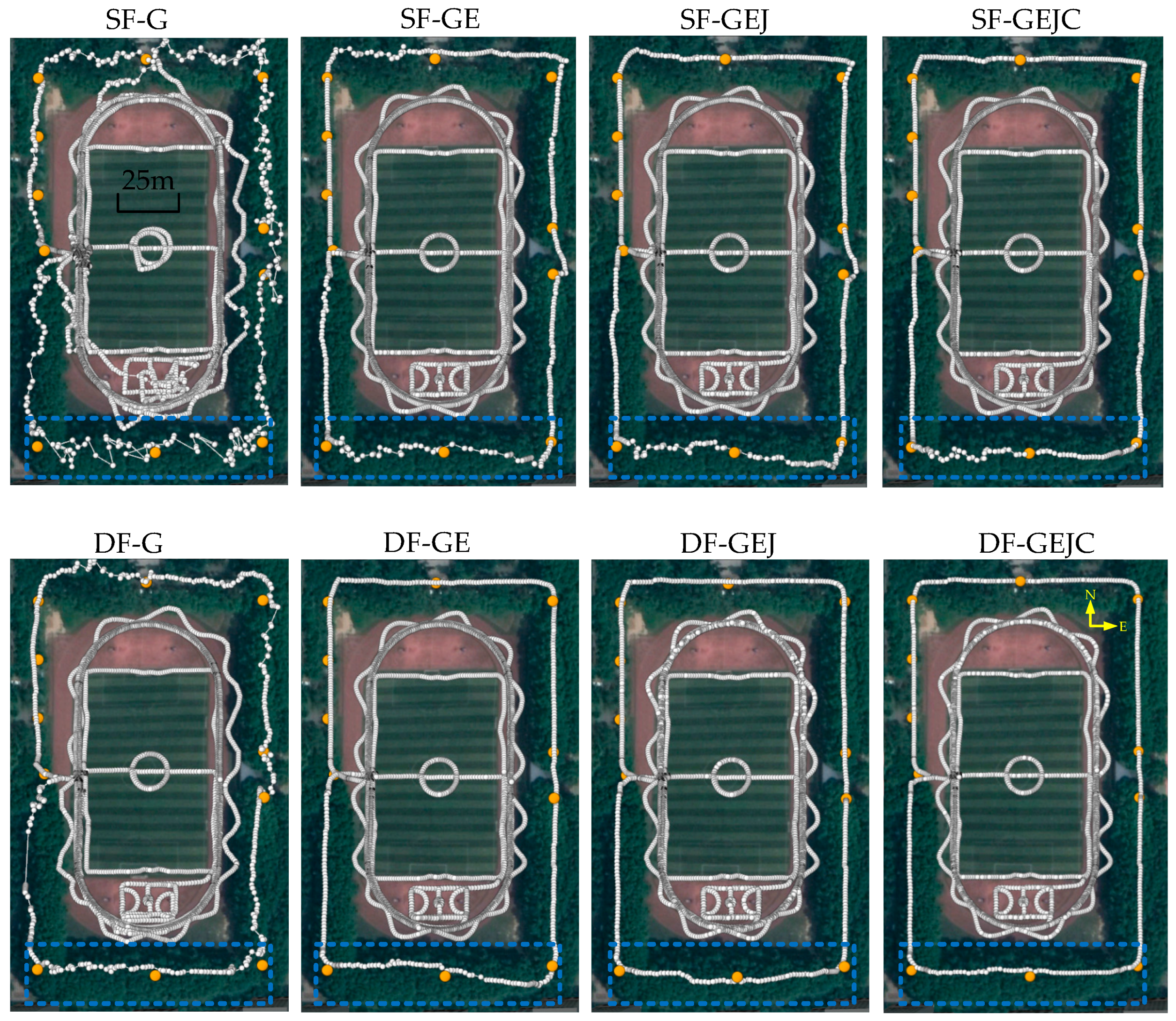
Looking into the results using the time differenced filter, we find that continuous and smooth positioning solutions are obtained for various observation combinations as shown in
Figure 14 and
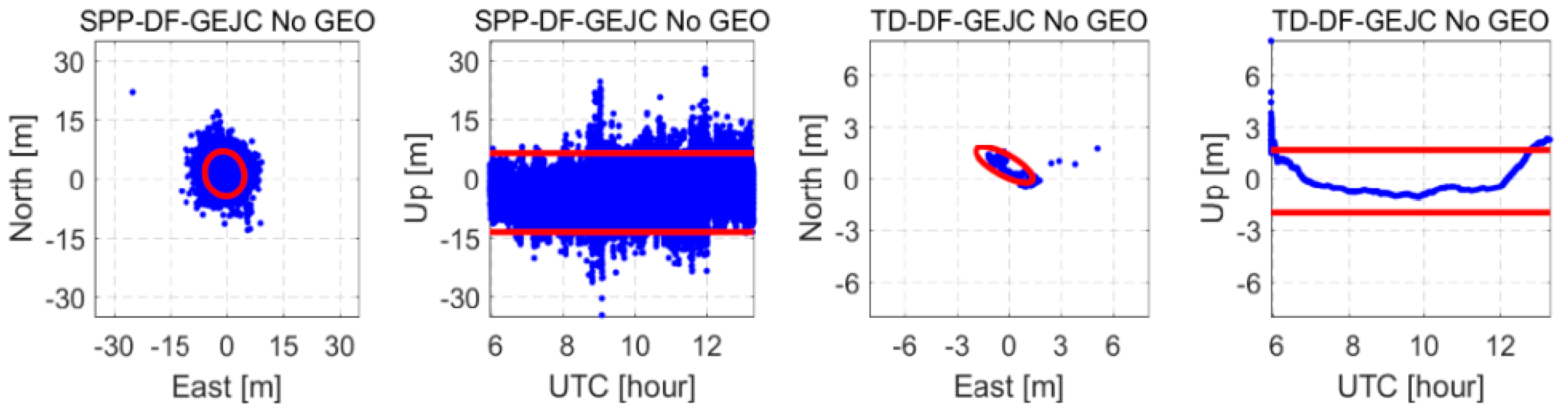
Figure 15. When only L1/E1 observations are used, the horizontal error RMS is 1.5–2.0 m and the vertical error RMS is about 2.5 m. The use of dual-frequency GNSS observations reduces the horizontal error RMS to about 1.0 m, and the vertical error RMS to about 1.5 m. For the dual-frequency positioning results with Galileo and GPS measurements, it can be seen that when positioning with all Galileo and GPS satellites, the time differenced filter algorithm positioning error RMS in East (E), North (N) and Up (U) directions is 0.67 m, 0.87 m, and 1.48 m, respectively. The SPP positioning error RMS in E, N, and U is 2.18 m, 2.95 m, and 6.53 m, respectively. The SPP availability is 99.3%. However, when conducting with only the Galileo and those GPS satellites with L5 measurements, the time differenced filter algorithm positioning error is 0.66 m, 1.07 m, and 1.70 m in E, N, and U directions, respectively, which is slightly worse than the positioning results with all Galileo and GPS satellites. The SPP positioning error increased to 4.62 m, 4.45 m, and 9.87 m, and the SPP availability decreased to 89.1%. Clearly, as only a subset of GPS satellites transmits L5 signals, if use only Galileo satellites and those GPS satellites with L5, the number of usable satellites rapidly reduced and the navigation performance degraded. As to the dual-frequency positioning results with GPS, Galileo, and QZSS measurements,
Figure 15 shows that the time differenced (TD) filter algorithm with a dual-frequency ionosphere-free combination positioning error RMS is 1.71 m, 2.04 m, and 1.63 m in E, N, and U directions, respectively; the SPP positioning error is 5.17 m, 5.32 m, and 8.67 m, respectively. These positioning errors are much larger than that of DF-GEJ results given by single-frequency positioning mode, as shown in
Table 4. Clearly, the dual-frequency ionosphere-free combined measurements greatly amplified the pseudorange noise, and the positioning performance degraded. Thus, the ionosphere-free combination pseudorange is not suitable for GNSS positioning with raw data from Xiaomi Mi 8. When conducting single-frequency positioning with L1/E1 measurements or dual-frequency positioning with the uncombined L1/E1 and L5/E5 measurements, interestingly, whether using single-frequency or dual-frequency GNSS observations, the GEJ combination has the best positioning accuracy. When the BeiDou observations are included, the positioning accuracy decreases, and the horizontal error RMS is about 2 m. As the time differenced filter algorithm can smooth the noise of pseudorange observations, its positioning accuracy is mainly affected by the broadcast ephemeris error, satellite position dilution of precision (PDOP), and ionospheric delay error. According to the error analysis of the broadcast ephemeris of various navigation systems by Oliver Montenbruck et al. [
37,
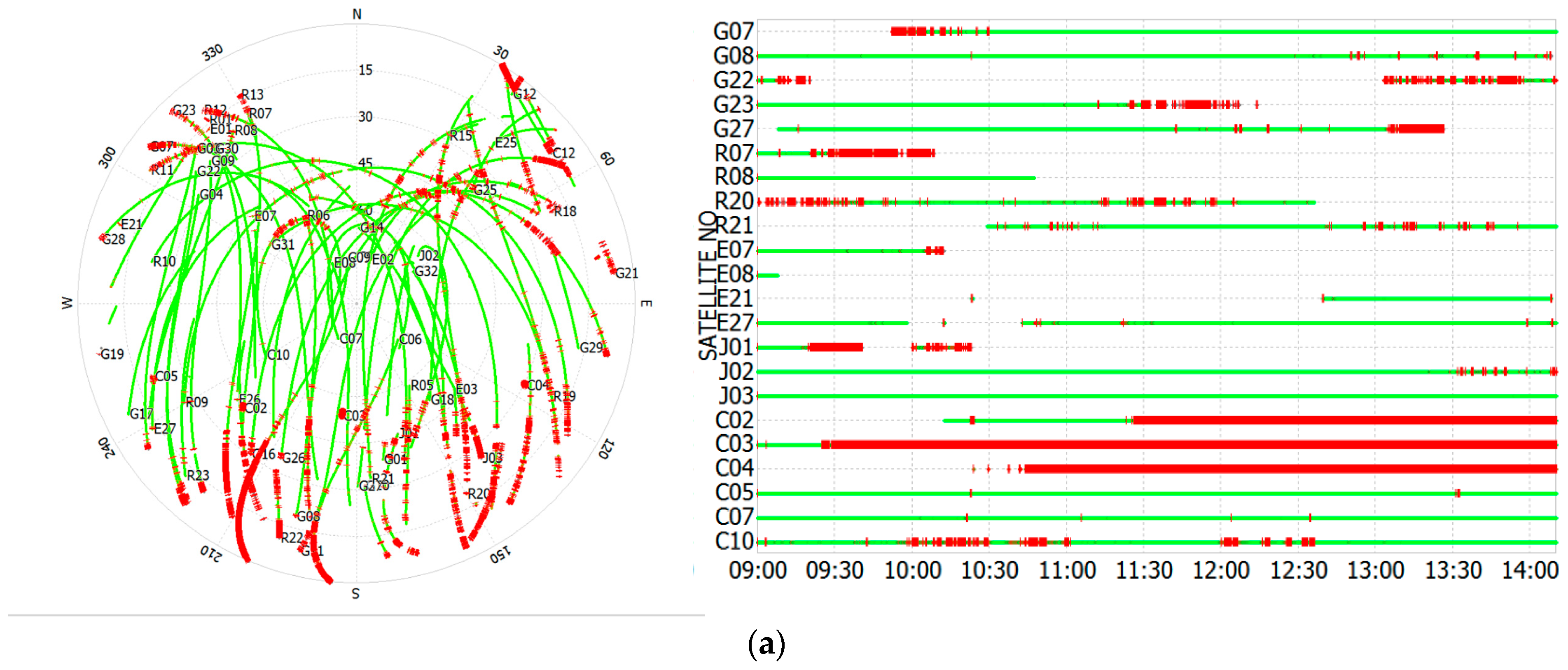
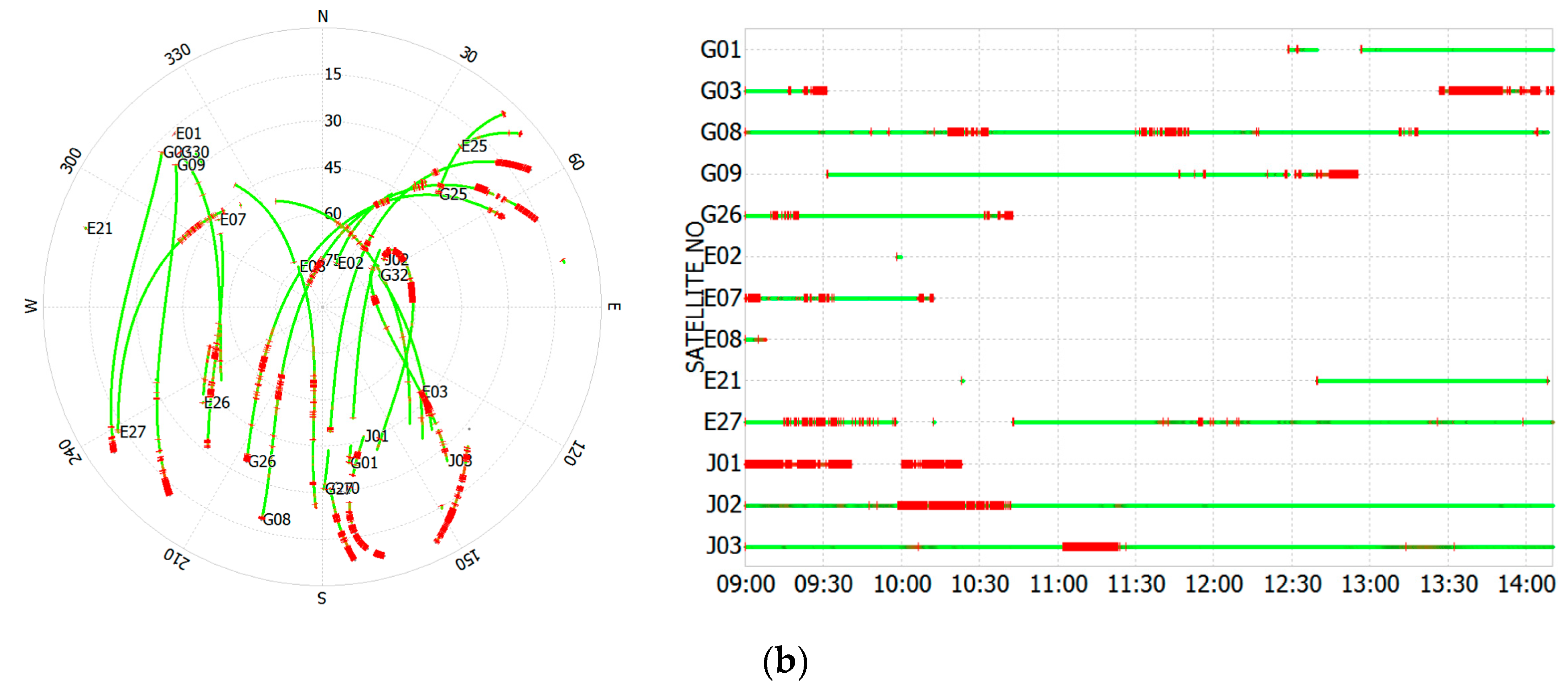
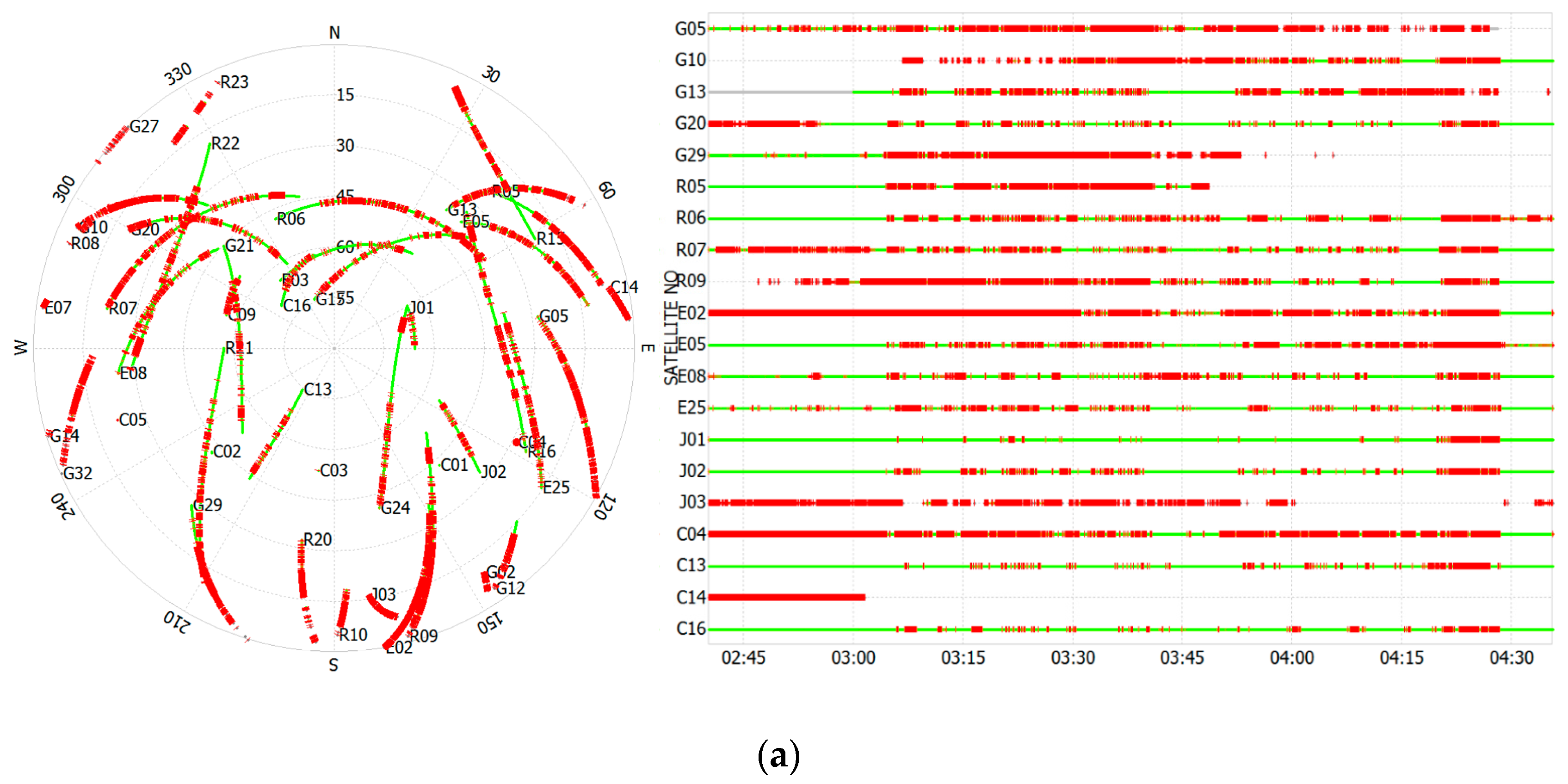
38], the near-static observation geometry for BeiDou GEO satellites results in a degraded orbit determination accuracy in comparison with Inclined GeoSynchronous Orbit (IGSO) and Medium Earth Orbit (MEO) satellites. Its along-track component of GEO satellite orbits is the least well determined, with errors up to tens of meters, and typical signal-in-space range errors reaching 3 m. In addition,
Figure 2 shows that, under static conditions, four GEO satellites are observed. Therefore, it is reasonable to conclude that the positioning error increment is due to the inclusion of the BeiDou GEO data. To verify this point, we re-processed the same data but excluded BeiDou GEO satellites. The results are shown in the fifth row of
Figure 14 and seventh row of
Figure 15. It is clear that the horizontal error RMS decreases rapidly. In addition, as illustrated in
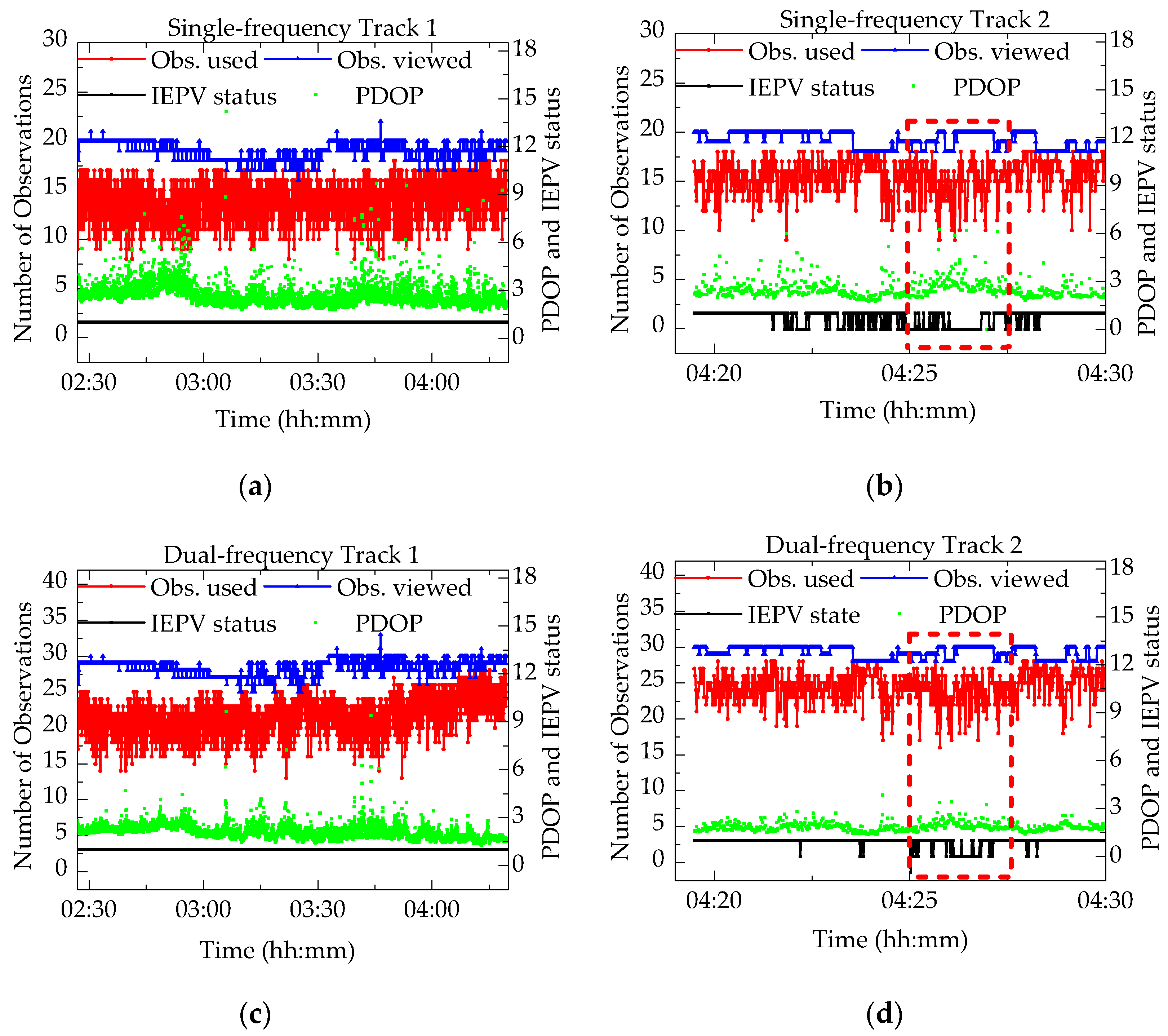
Figure 2, the carrier phase observations of the BeiDou GEO satellites are interrupted much more often than those of other satellites. Therefore, when there are sufficient visible satellites, it is suggested that, for Xiaomi Mi 8, Beidou GEO satellites should not be used. Comparing the TD filter results of C/N0-dependent weighting with that of the SISRE value based weighting in
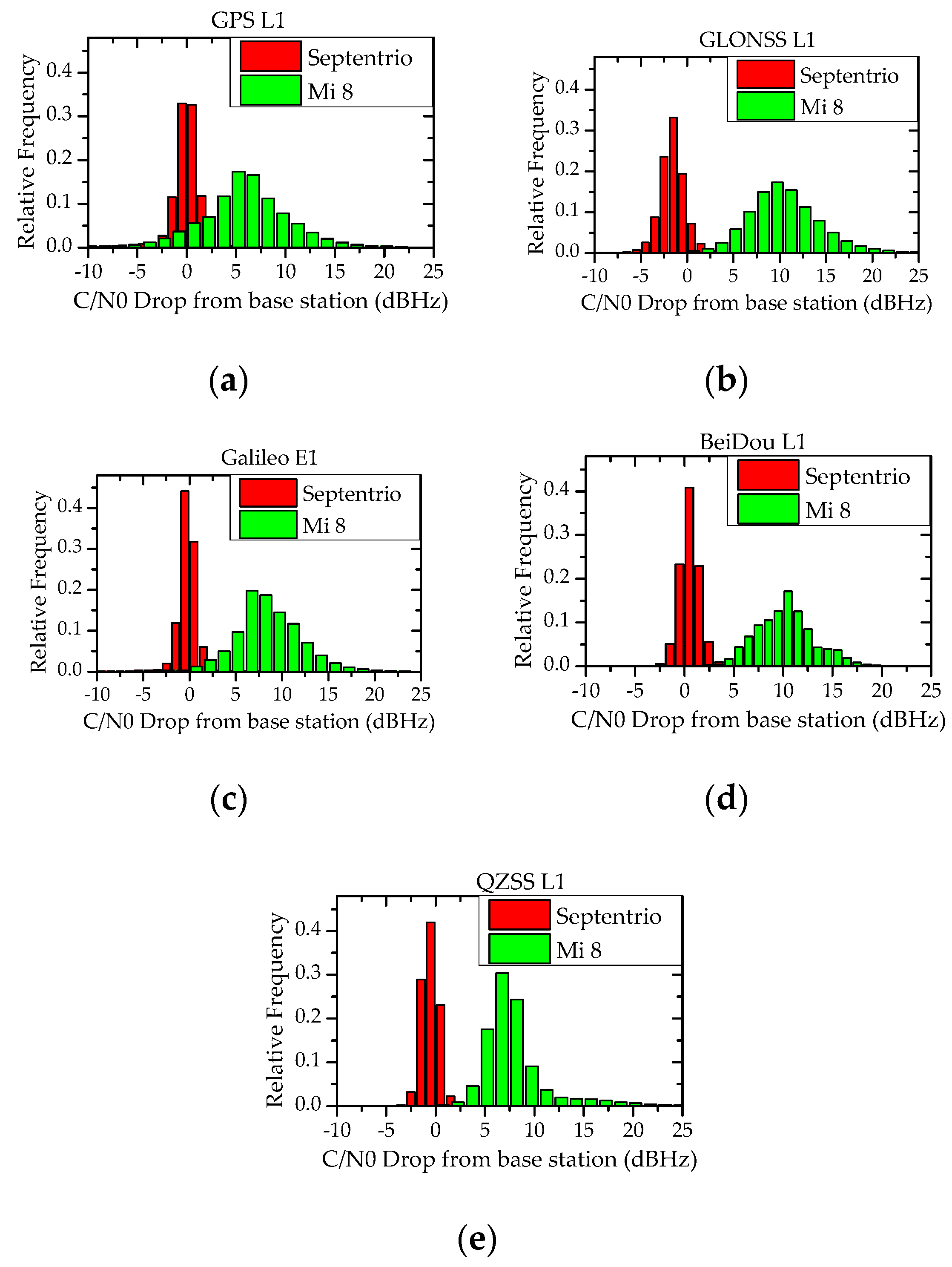
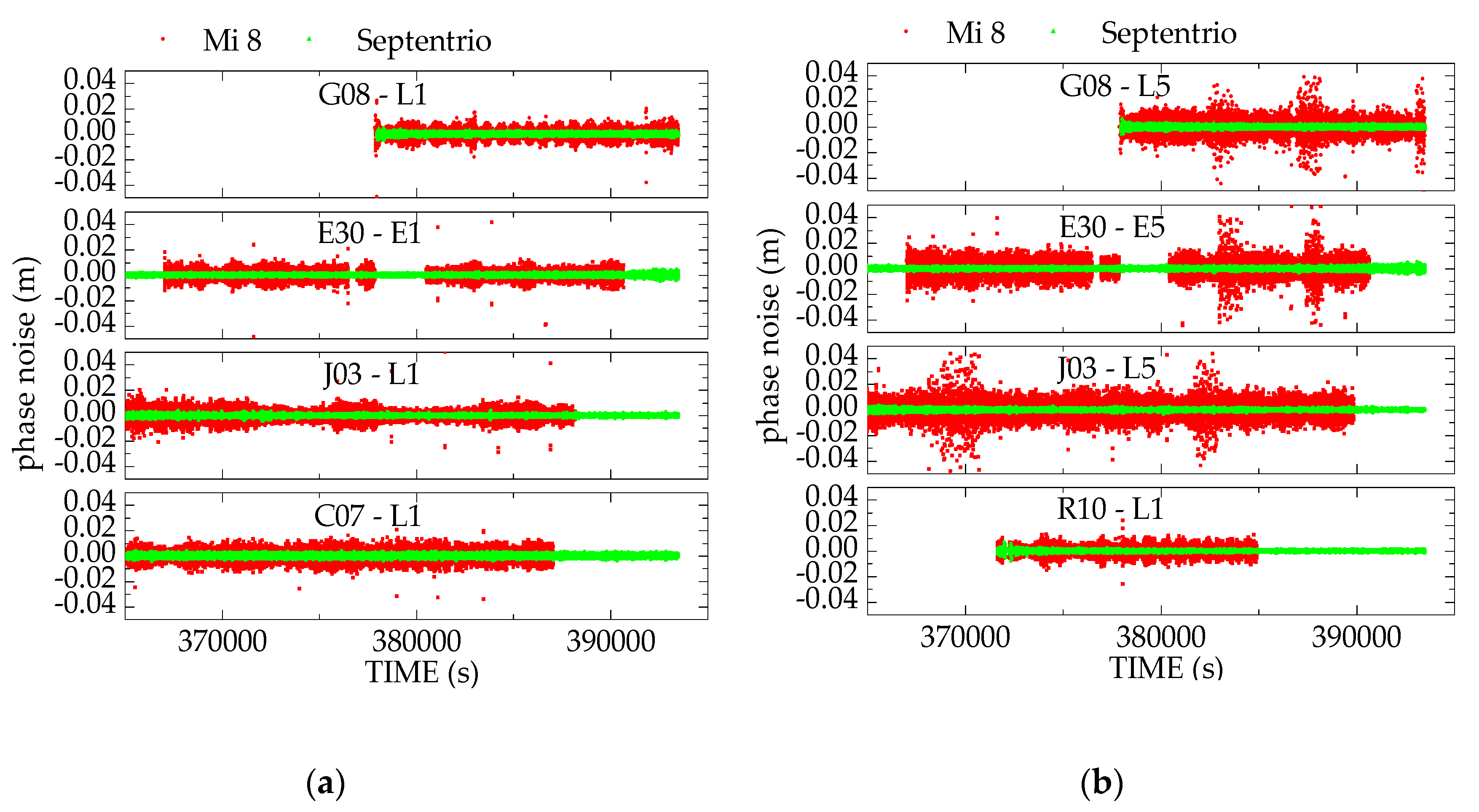
Table 4, it can be seen that, the positioning accuracy of the SISRE value-based weighting is worse than that of the C/N0-dependent weighting model. The pseudorange noise is the major one in all error sources, and much larger than the errors of GNSS satellite orbits and clocks. A reasonable weighting model should be set based on the noise level of pseudorange observations, as the pseudorange noise is clearly related to the C/N0 as shown in
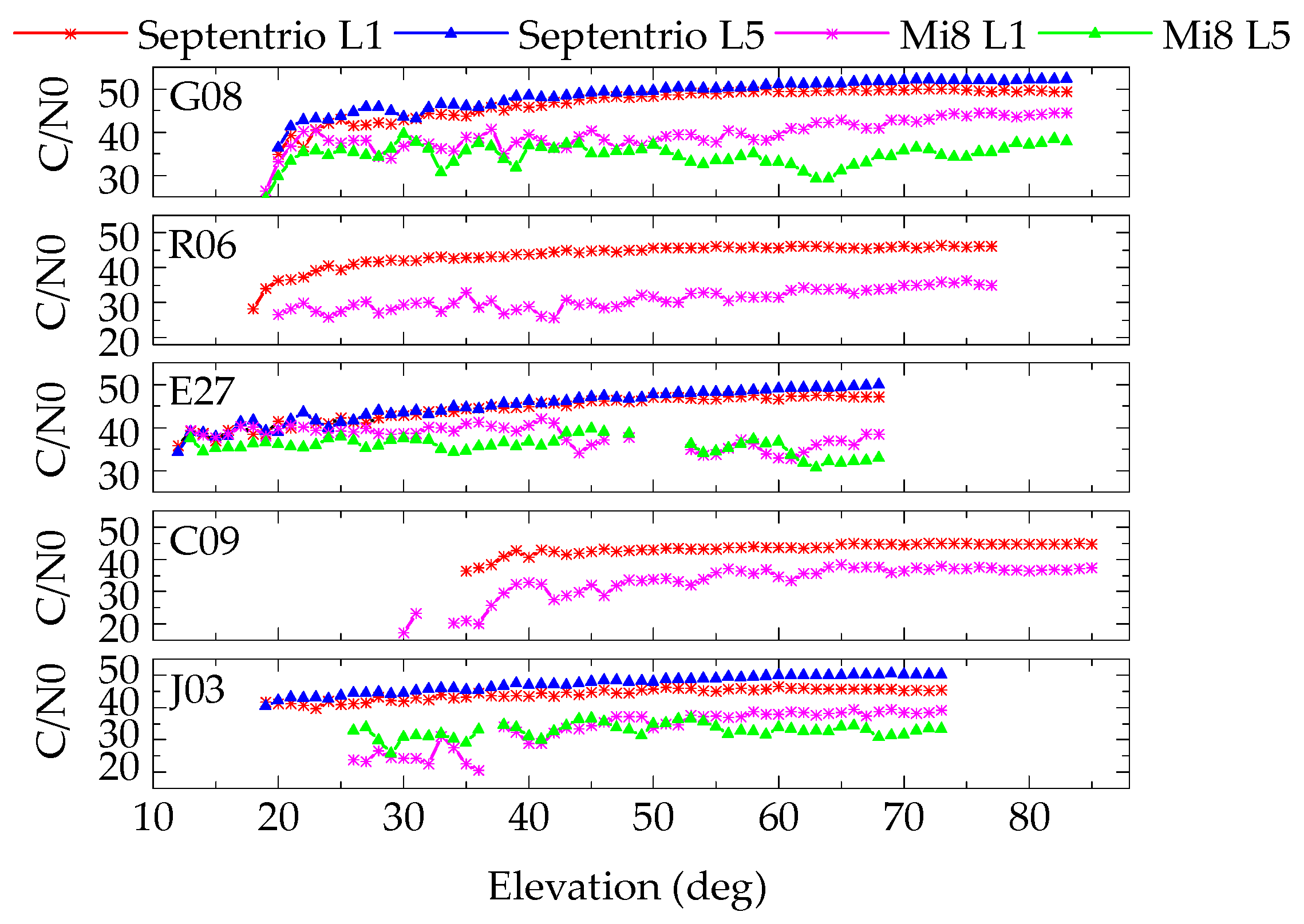
Figure 9. Therefore, the C/N0-dependent weighting model is more suitable.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}