Automated Feature-Based Down-Sampling Approaches for Fine Registration of Irregular Point Clouds




Abstract
:1. Introduction
- The derived laser-based/image-based point clouds usually include an excessive number of points [31]. Therefore, for these datasets, the conventional ICP-based registration, which utilizes the entirety of the available points, is time-consuming and even unnecessary. For example, there are usually thousands of points acquired along with a given planar feature within a high point density area. However, only a portion of them is required to represent a reliable planar surface, whereas the remaining points are redundant.
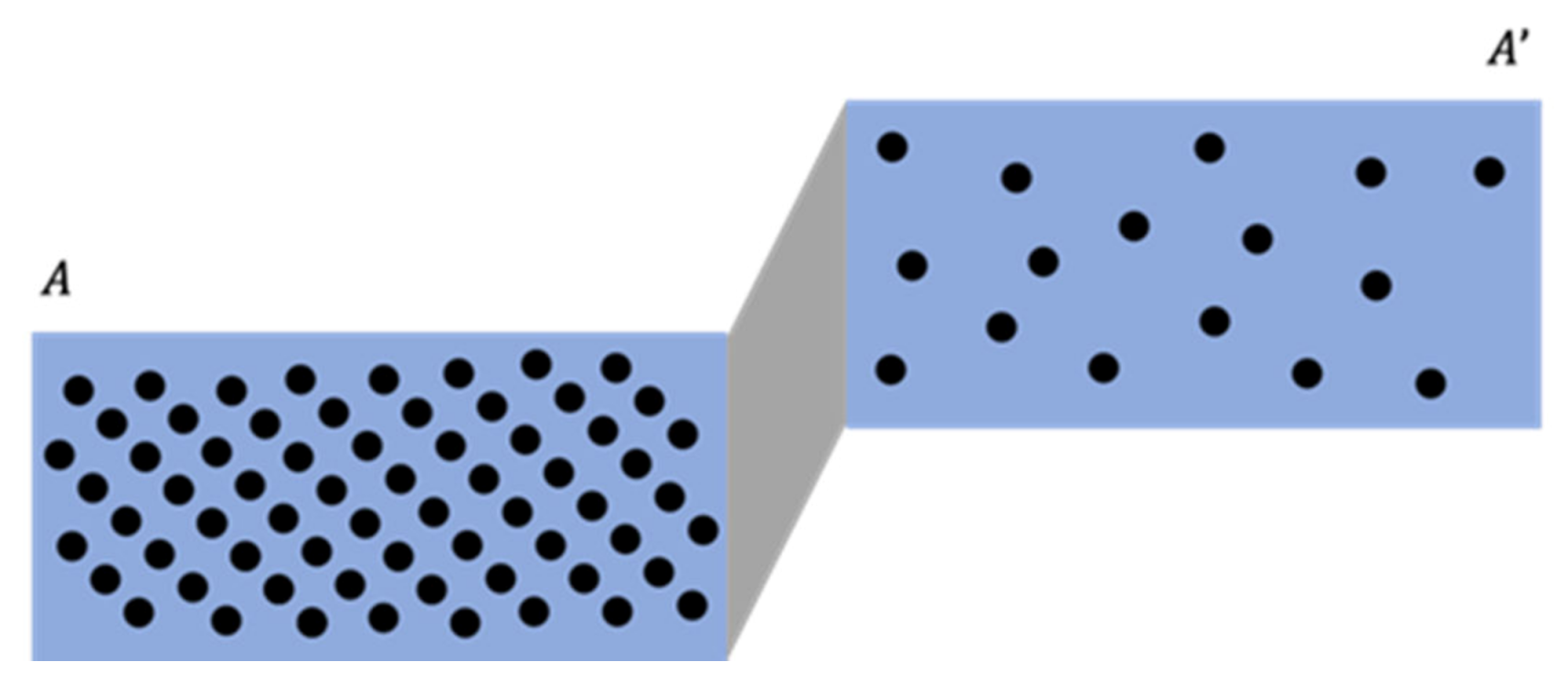
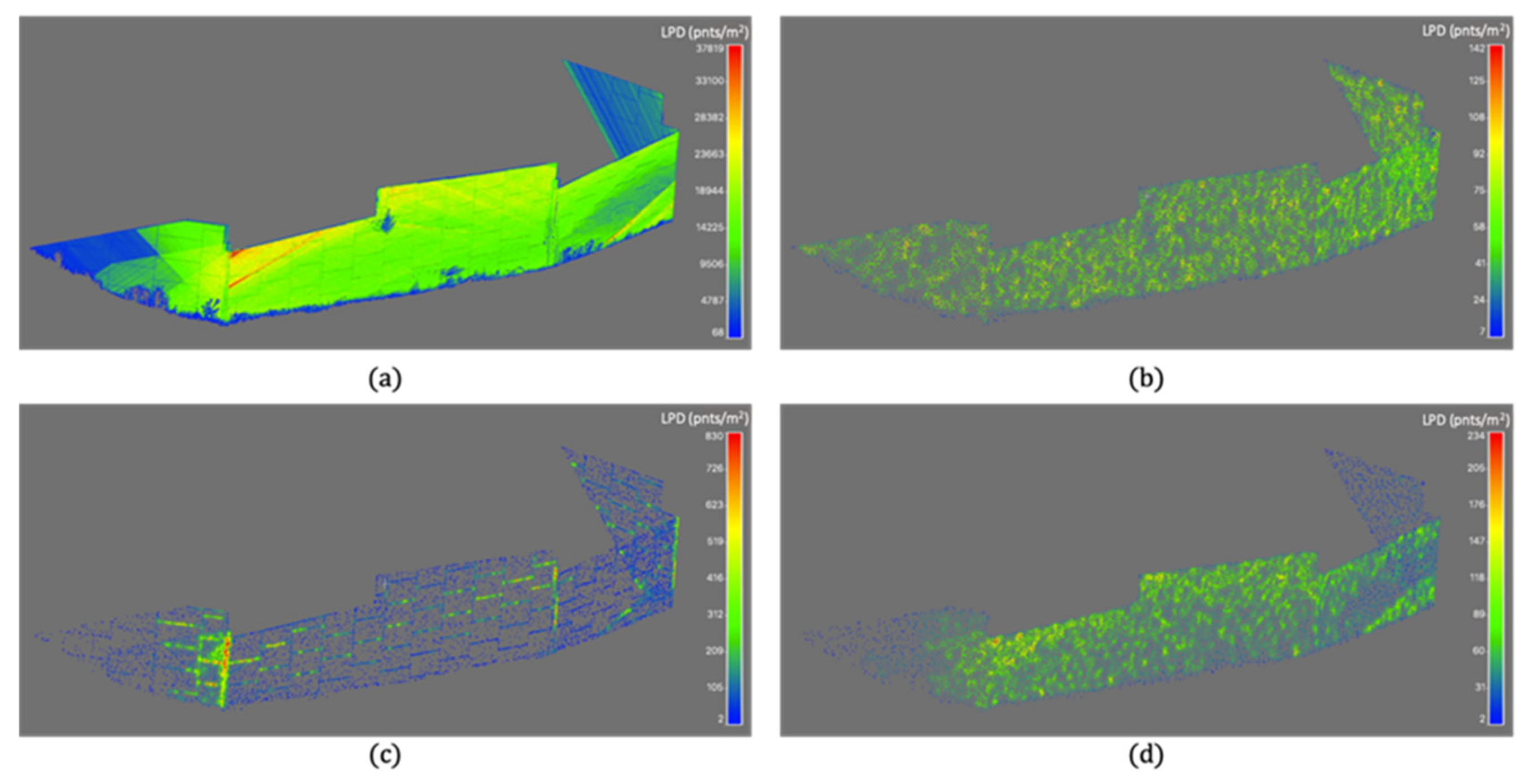
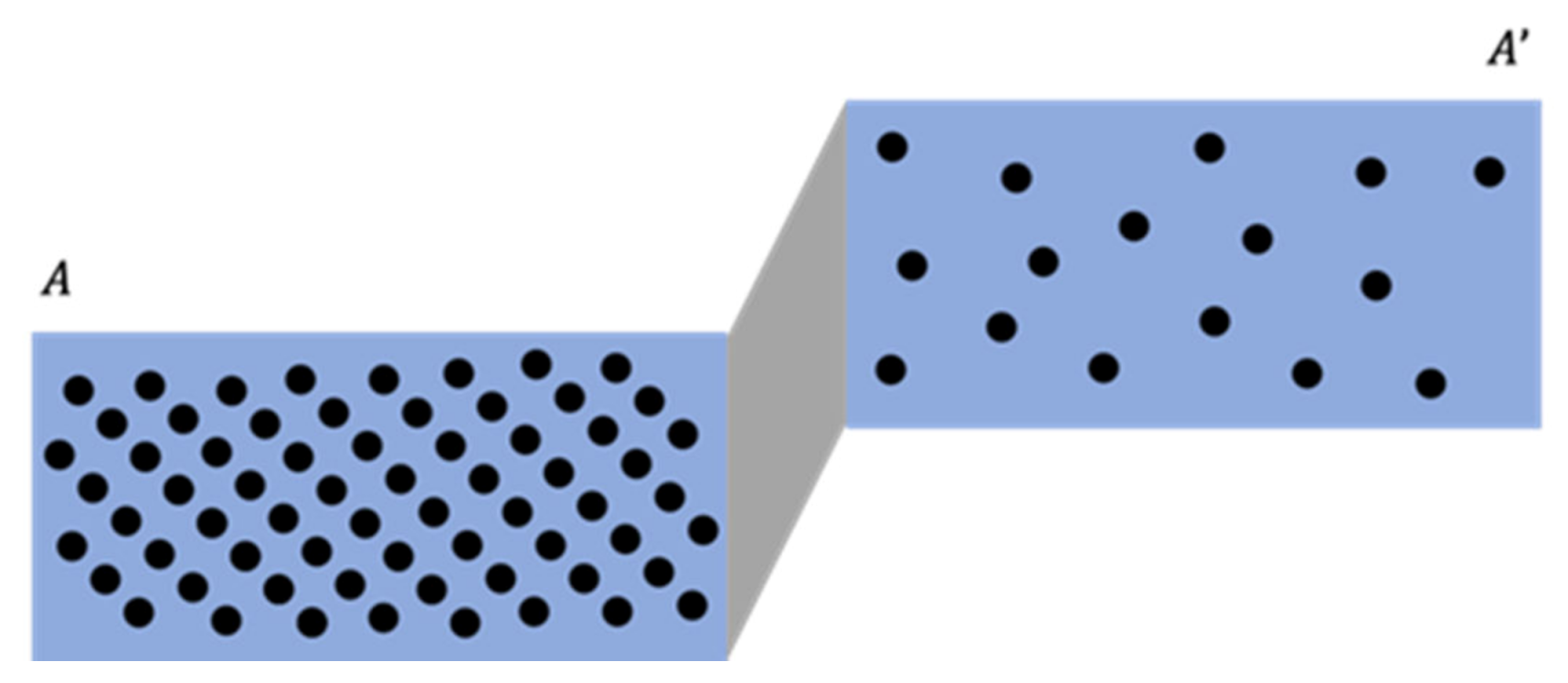
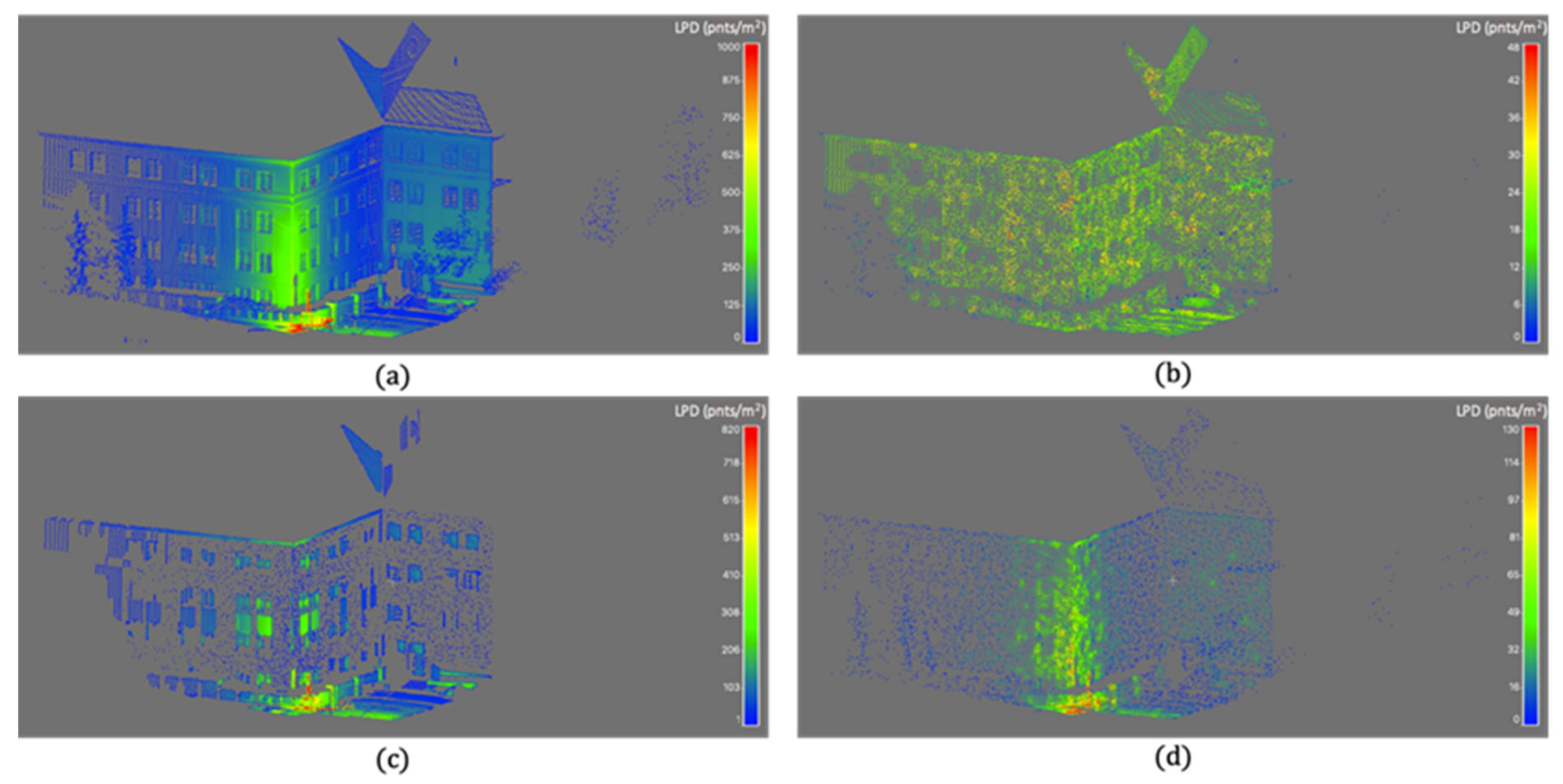
- Due to the nature of the utilized sensors, the acquired point clouds do not have a uniform point density. For example, the point clouds acquired by a TLS have a higher point density at locations closer to the scanner. Such variations in point density will negatively impact the accuracy of the registration procedure as they can lead to over-weighting of the points in high-density areas.
- The ICP method requires large overlapping areas among the datasets and a reasonable initial approximation of the transformation parameters in order to establish the primitive correspondence (i.e., a point to its nearest point in another scan or a point to its nearest patch) [31,32]. Nevertheless, even with considerable overlap and its initial high-quality parameters, the ICP algorithm and its variants can fail to reliably estimate the registration parameters due to the negative impact from linear/cylindrical objects and rough surfaces, which are usually partially represented by point clouds (i.e., neither a laser scanning nor an imaging system can capture/derive points that completely cover such neighborhood) [33].
1.1. Related Work for Existing Down-Sampling Approaches
1.2. Aim of the Study
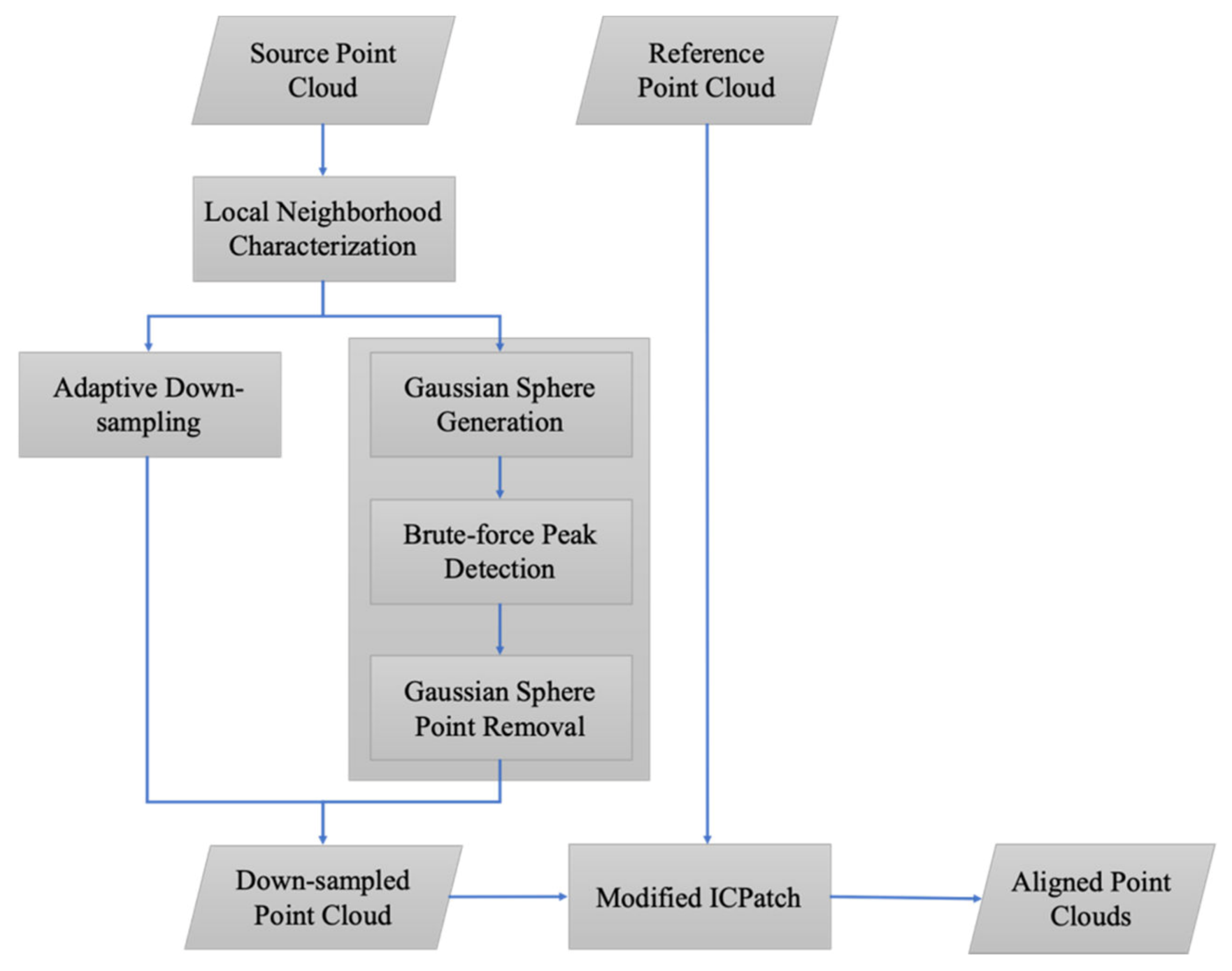
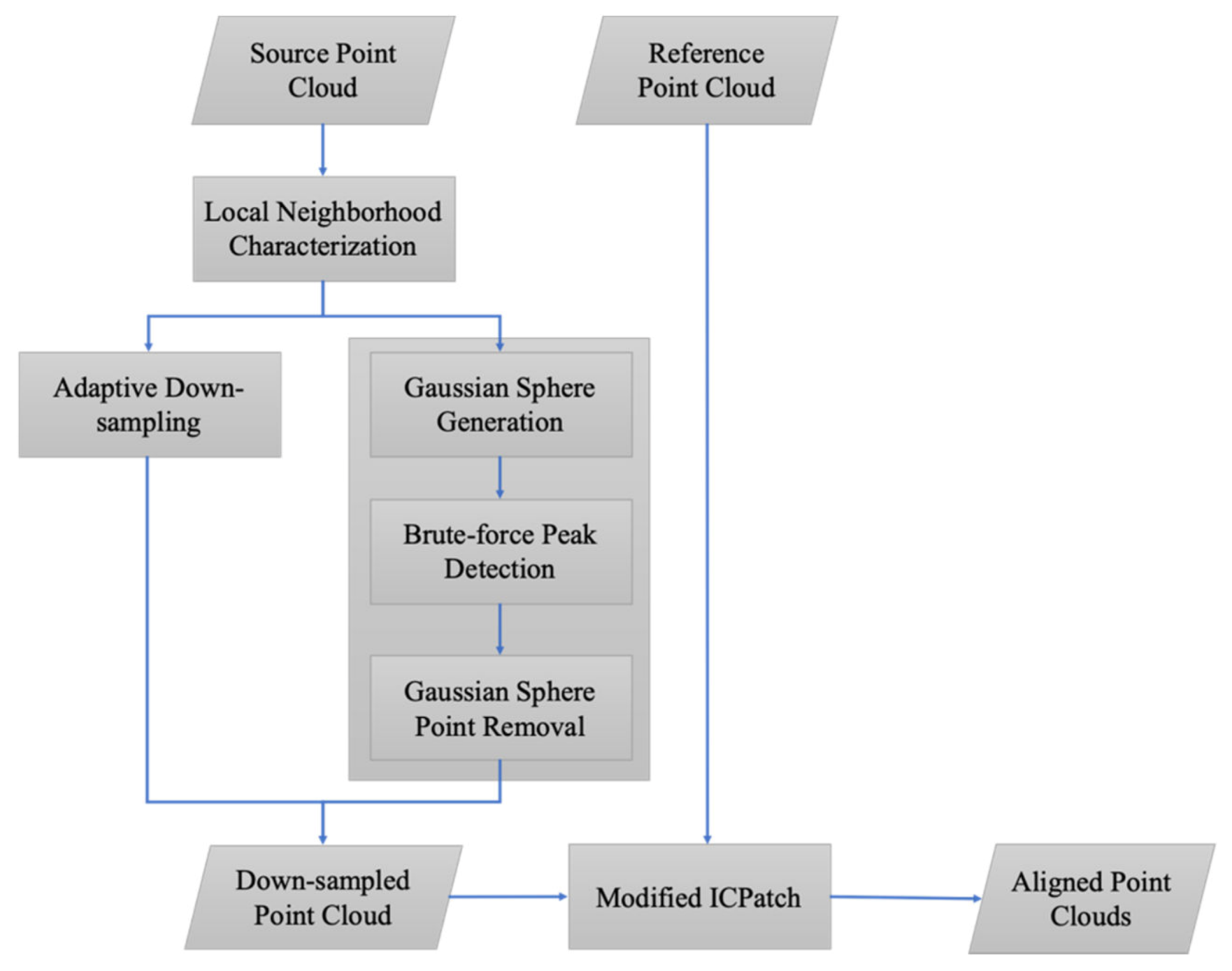
2. Methodology
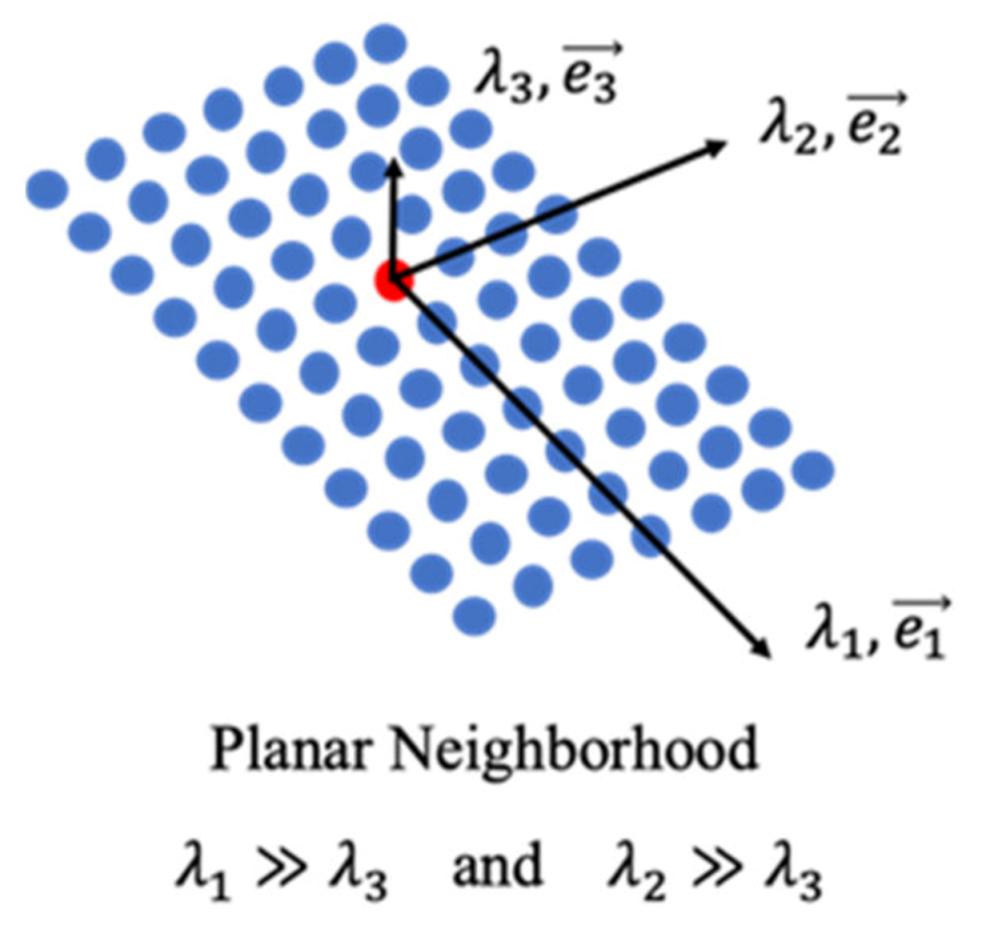
2.1. Local Neighborhood Characterization
2.2. Point Cloud Down-Sampling
2.2.1. Adaptive Down-Sampling
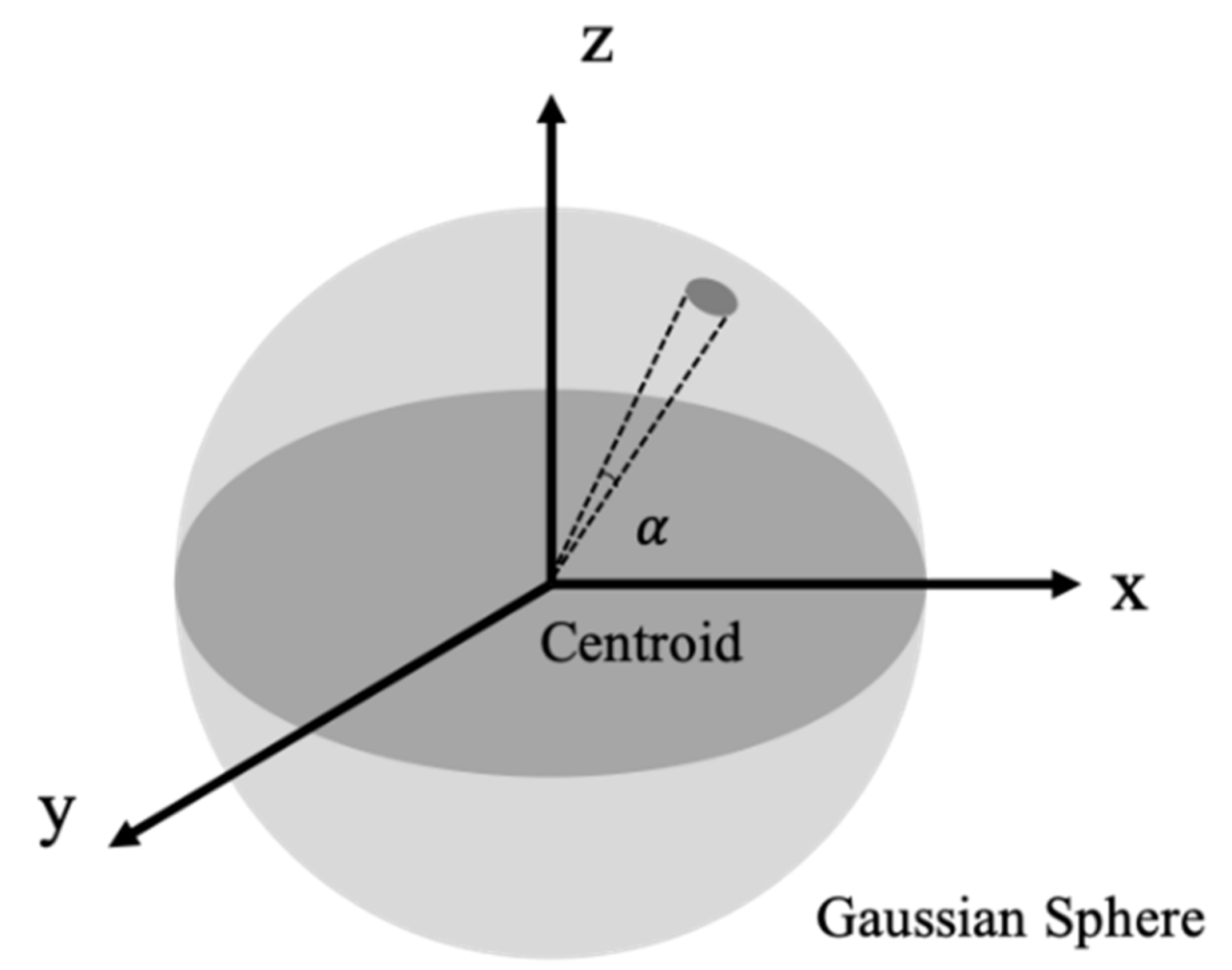
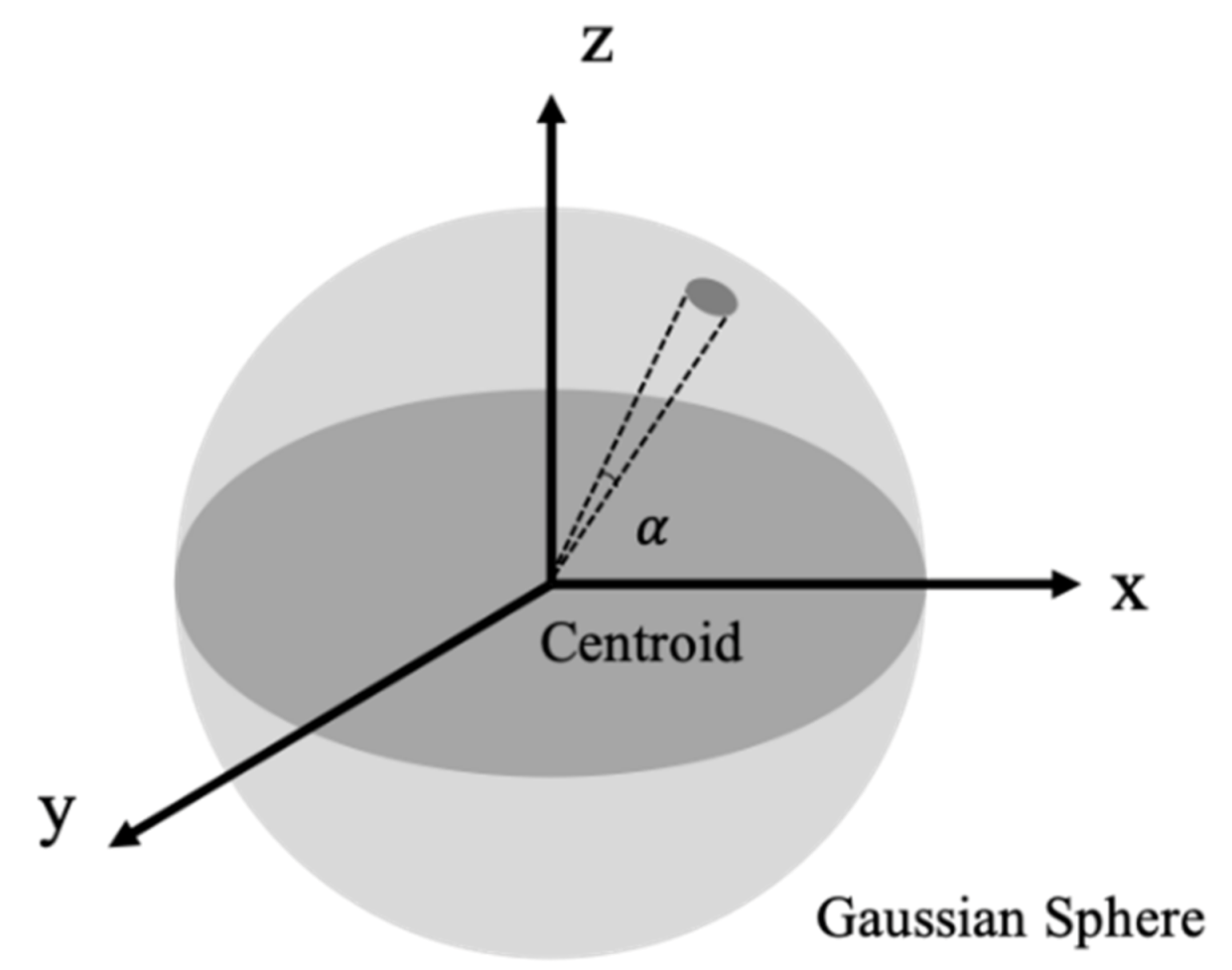
2.2.2. Gaussian Sphere-Based Down-Sampling
- A distance threshold for the Euclidean clustering is first specified.
- Given the set of points belonging to the same peak, one point is randomly selected as the initial seed for the Euclidean clustering. Afterwards, this initial seed point is added to a list of temporary seed points , and removed from .
- If is not empty, the first point in the list is picked up as the current seed for the region-growing process. is then removed from .
- Now that the current seed is determined, all points, which belong to and are within the distance threshold to , have to be added to the list of current clusters and the list of seed points . In the meantime, these selected points have to be removed from .
- Steps 3 and 4 are repeated until is empty. Then, the group of points from the list are labeled to the same cluster.
- The process from Step 2 to 5 is repeated until no more clusters can be detected (i.e., is empty).
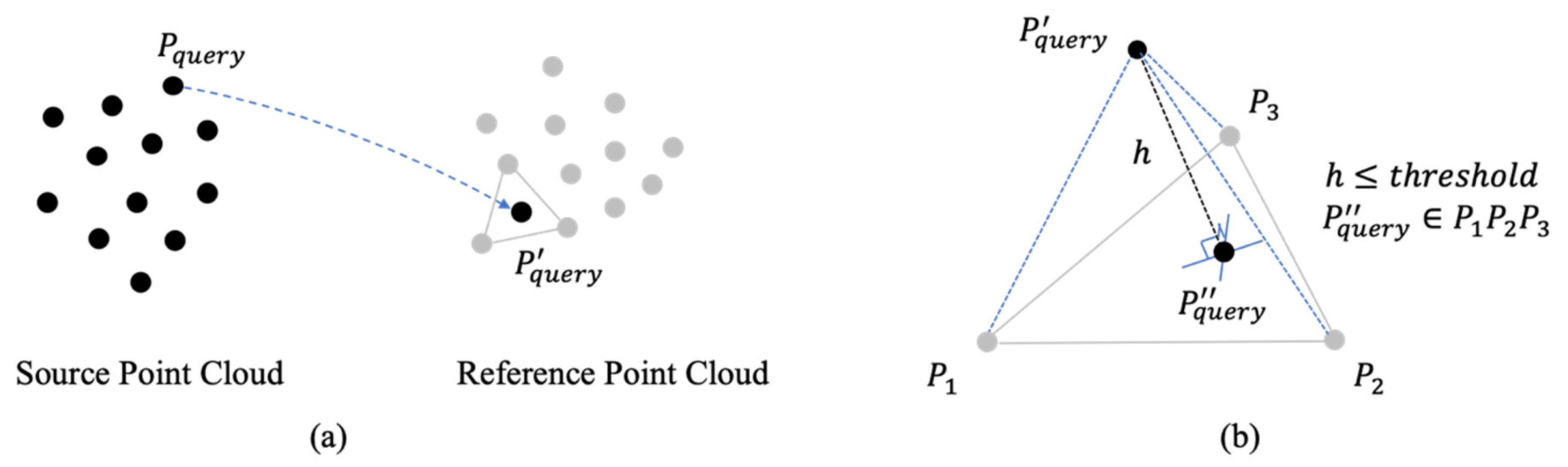
2.3. Improved ICPatch Registration
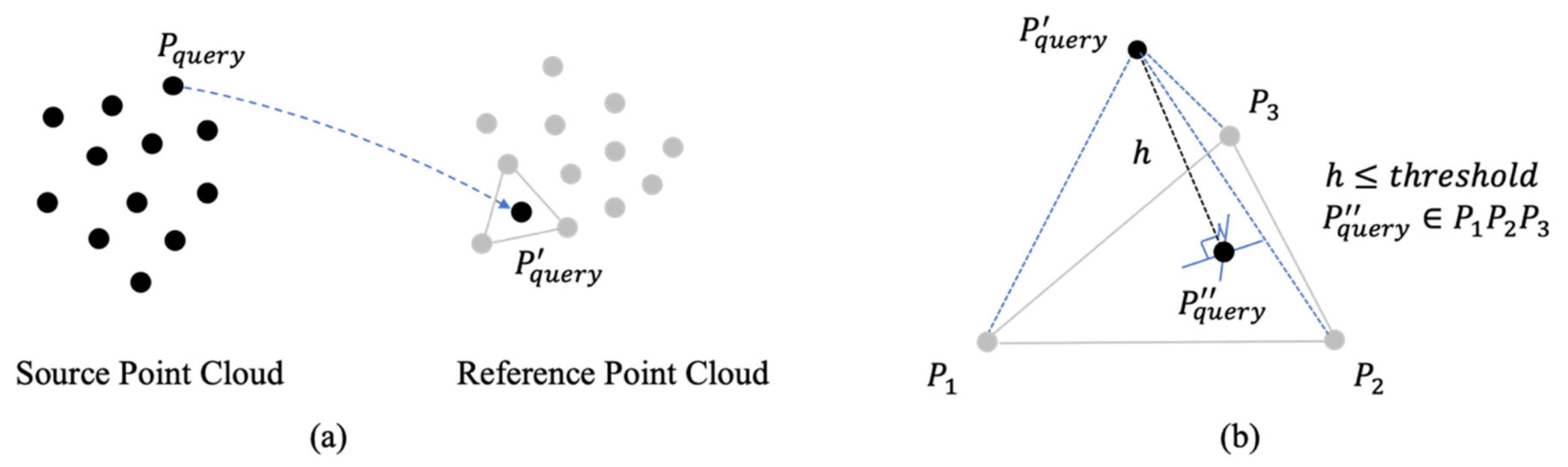
- The normal distance from the transformed query point to the corresponding triangular patch , which is composed of the three closest points , , and in the reference point cloud, must be less than the pre-defined threshold.
- The projection of the transformed query point onto the triangular patch ,, must be inside the patch.where, is the coordinates for the query point , is the coordinates for the transformed query point , is the rotation matrix relating the query and reference coordinate systems defined by the three rotation angles , , and , is the translation vector relating the source and reference point clouds, and is the scale factor.
3. Experimental Results
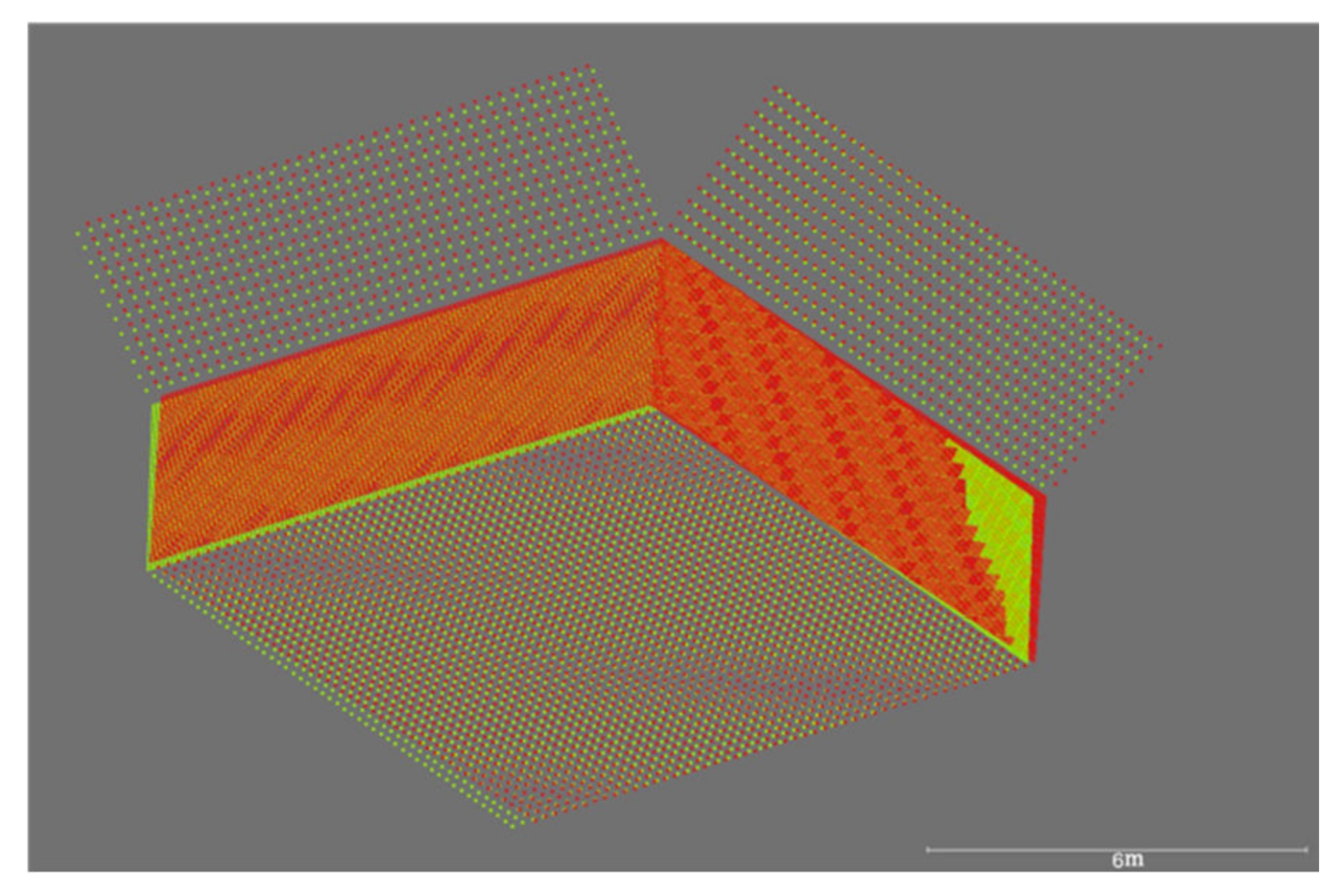
3.1. Simulated Dataset
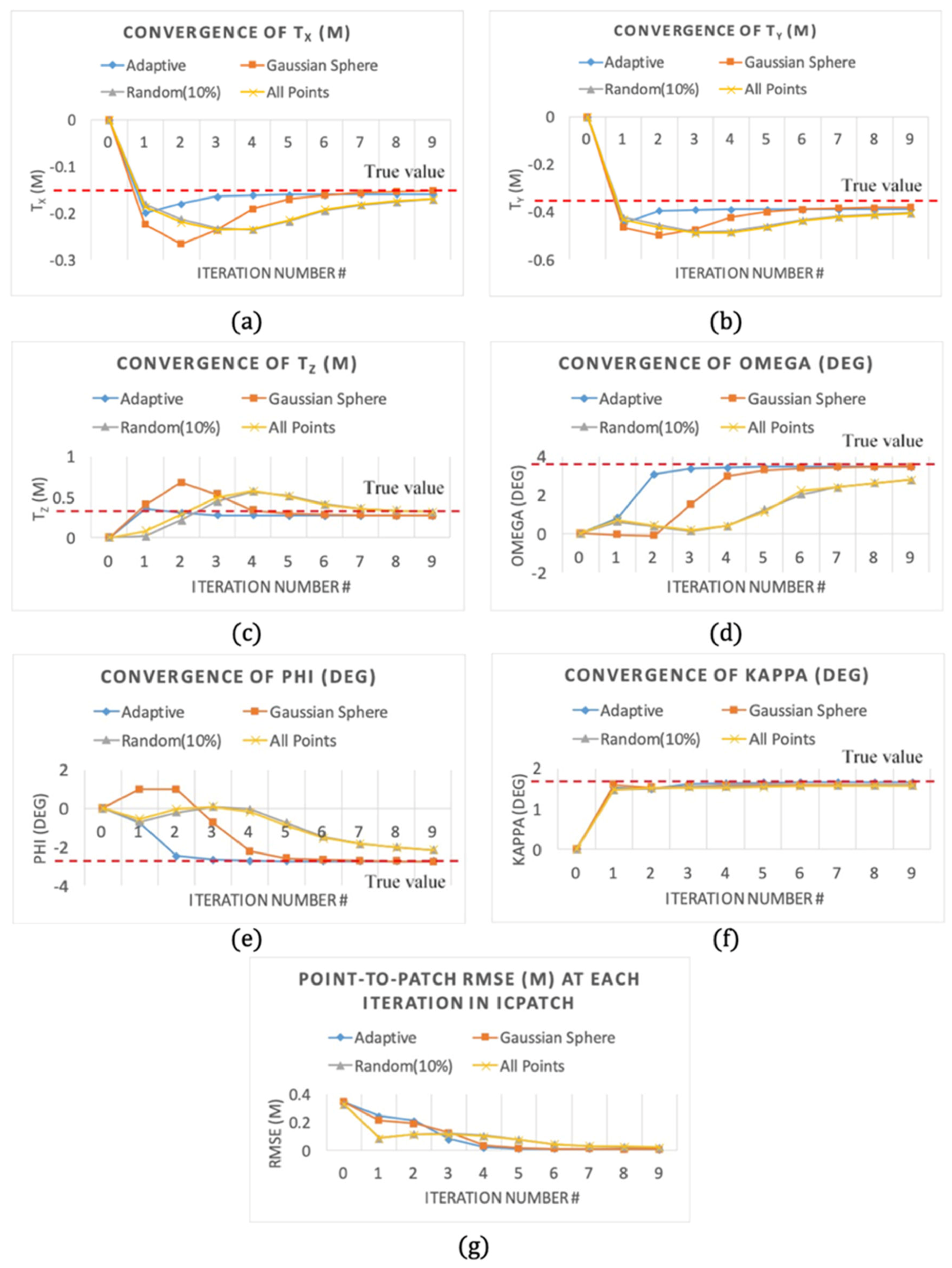
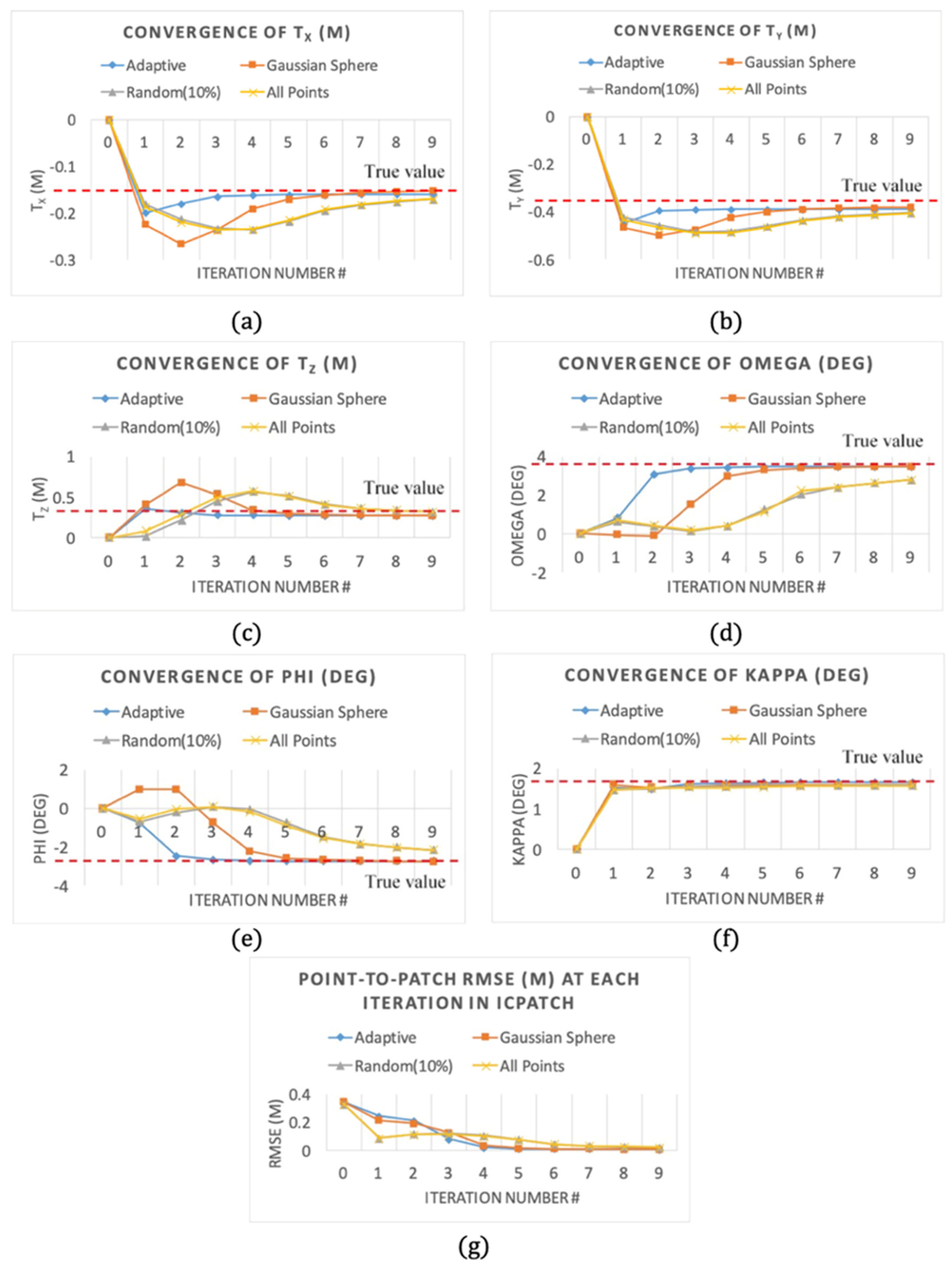
- For the simulated dataset with a gradually increasing noise level with a standard deviation up to m, the maximum absolute rotation and translation errors derived from the two proposed adaptive and Gaussian sphere down-sampling approaches were and and 0.0022 and 0.0025 m, respectively (highlighted in Table 2). This result indicates that both the adaptive and Gaussian sphere-based down-sampling approaches provided an accurate estimate for the transformation parameters.
- Compared to the two conventional strategies (random down-sampling or using all points), the two implemented proposed approaches exhibited a much faster convergence, which demonstrated that they were more efficient for the fine registration.
- The ICPatch registration using either a set of randomly selected points or all possible points demonstrated similar performance in terms of their convergence rate because the random down-sampling did not change the distribution of the utilized point clouds (i.e., after applying the random down-sampling, there were more points in the high point density area while there were fewer points in the low point density regions).
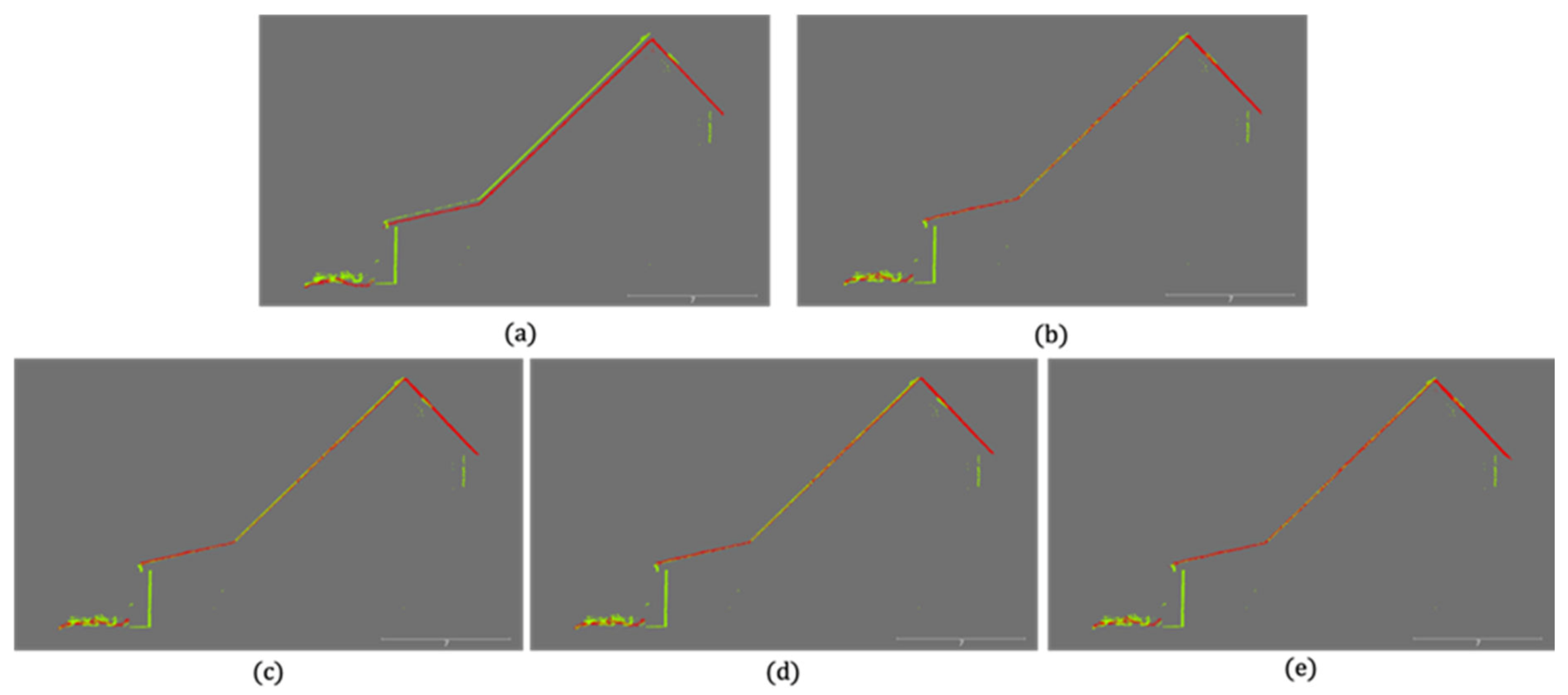
- As mentioned earlier, one may expect to see a faster convergence for the Gaussian sphere-based down-sampling approach as it is designed to maintain a similar number of points on each of the detected planar surfaces with a given orientation (i.e., better distribution of the points). However, as shown in Figure 9a–f, the proposed adaptive down-sampling approach exhibited a better convergence rate on both the estimated translation and rotation parameters. One possible explanation for the superior performance of the adaptive approach is it has less sensitivity to the noise level when compared to the Gaussian sphere-based approach.
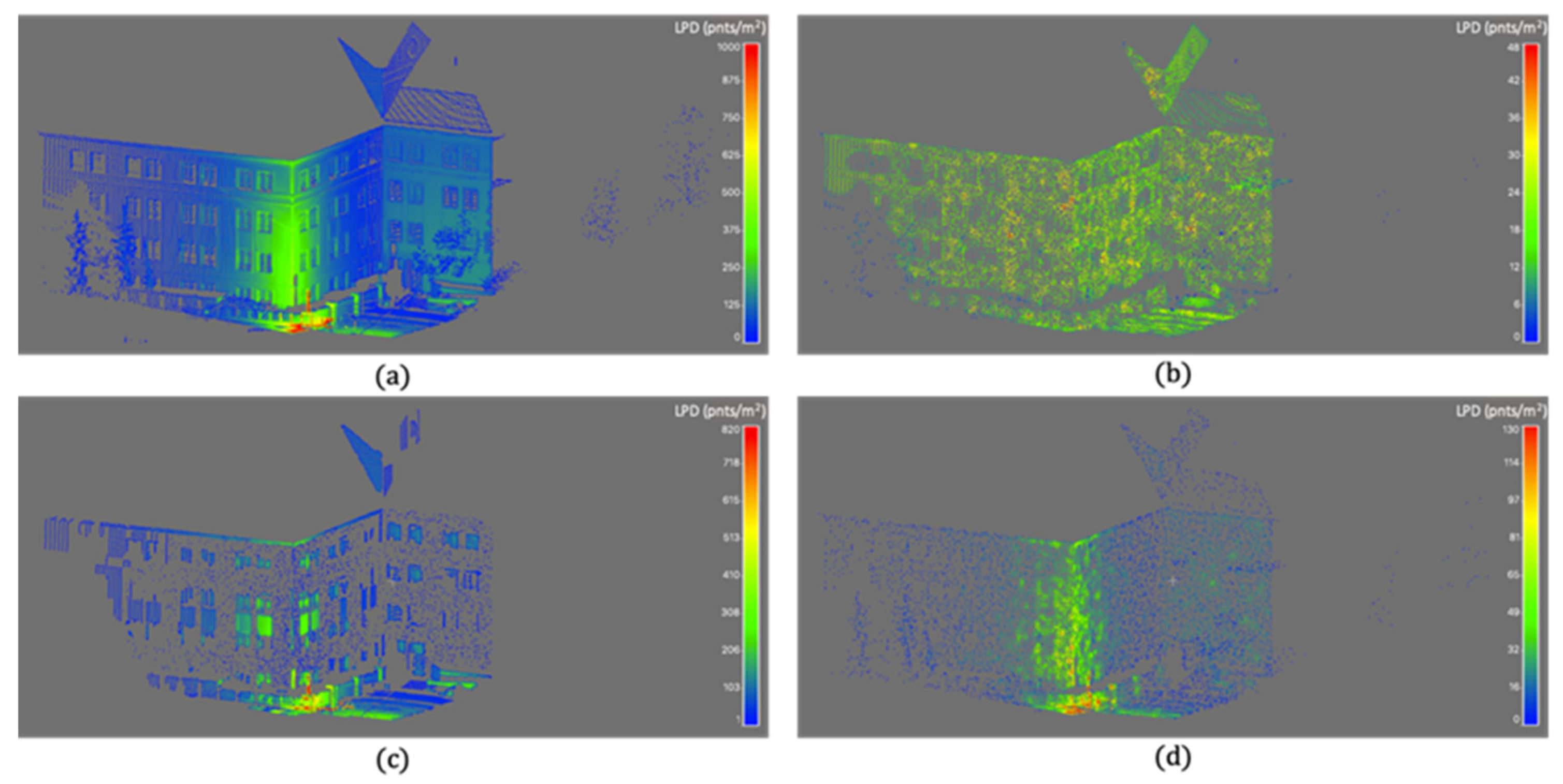
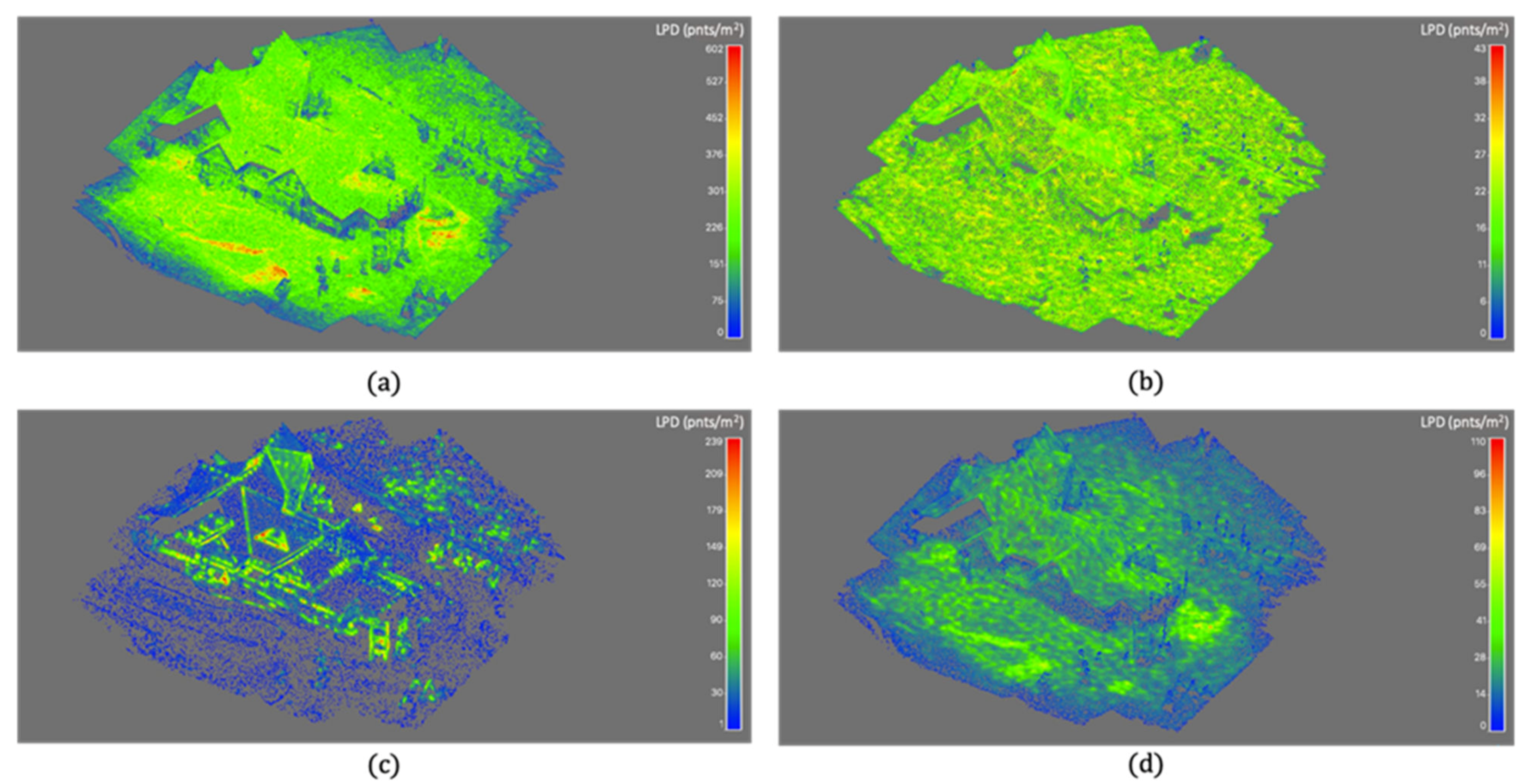
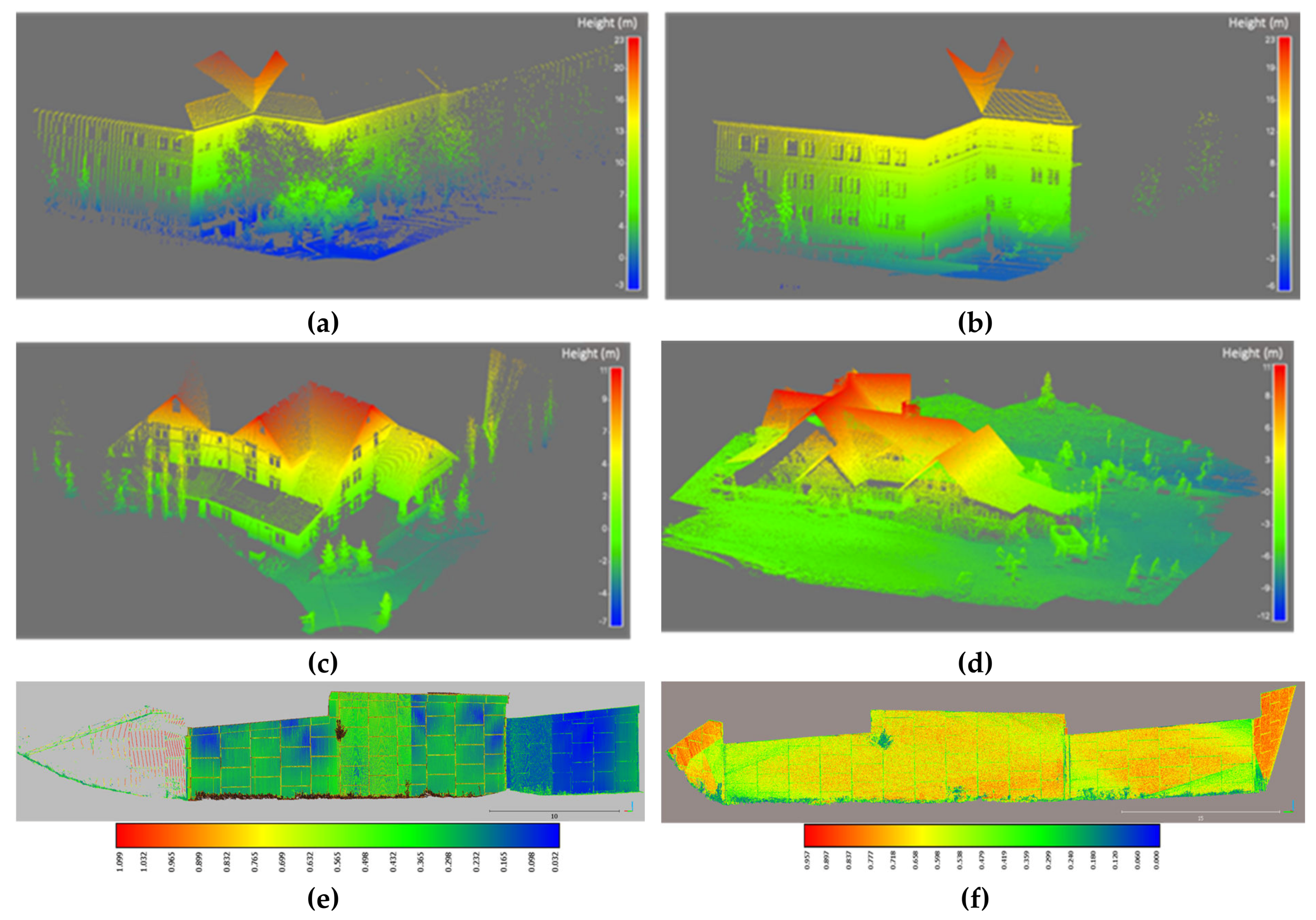
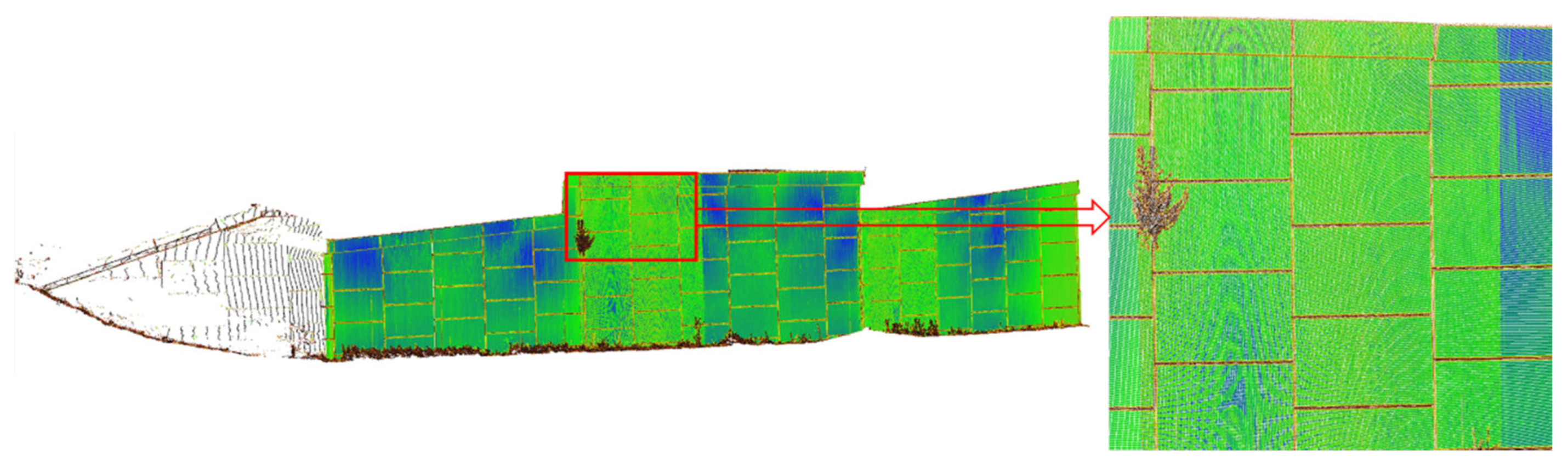
3.2. Real Dataset
Data Description
4. Conclusions and Recommendations for Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Arayici, Y. An approach for real world data modelling with the 3D terrestrial laser scanner for built environment. Autom. Constr. 2007, 16, 816–829. [Google Scholar] [CrossRef] [Green Version]
- Boardman, C.; Bryan, P. 3D Laser Scanning for Heritage: Advice and Guidance on the Use of Laser Scanning in Archaeology and Architecture; Historic England: London, UK, 2018. [Google Scholar]
- El Nabbout, K. Terrestrial Laser Scan Application in Urban Planning. In Intrue-3d Cartogr; Springer: Berlin/Heidelberg, Germany, 2011; pp. 259–264. [Google Scholar]
- Aldosari, M.; Al-Rawabdeh, A.; Bullock, D.; Habib, A. A Mobile LiDAR for Monitoring Mechanically Stabilized Earth Walls with Textured Precast Concrete Panels. Remote Sens. 2020, 12, 306. [Google Scholar] [CrossRef] [Green Version]
- Shao, X.; Zhao, H.; Shibasaki, R.; Shi, Y.; Sakamoto, K. 3D crowd surveillance and analysis using laser range scanners. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; IEEE: Piscataway, NJ, USA; pp. 2036–2043. [Google Scholar]
- Al-Rawabdeh, A.; He, F.; Moussa, A.; El-Sheimy, N.; Habib, A. Using an unmanned aerial vehicle-based digital imaging system to derive a 3D point cloud for landslide scarp recognition. Remote Sens. 2016, 8, 95. [Google Scholar] [CrossRef] [Green Version]
- Lari, Z.; Habib, A. A new approach for segmentation-based texturing of laser scanning data. The International Archives of Photogrammetry. Remote Sens. Spat. Inf. Sci. 2015, 40, 115. [Google Scholar]
- González-Aguilera, D.; Rodríguez-Gonzálvez, P.; Gómez-Lahoz, J. An automatic procedure for co-registration of terrestrial laser scanners and digital cameras. Isprs J. Photogramm. Remote Sens. 2009, 64, 308–316. [Google Scholar] [CrossRef]
- He, F.; Habib, A.F. A closed-form solution for coarse registration of point clouds using linear features. J. Surv. Eng. 2016, 142, 04016006. [Google Scholar]
- Al-Durgham, K.; Habib, A. Association-matrix-based sample consensus approach for automated registration of terrestrial laser scans using linear features. Photogramm. Eng. Remote Sens. 2014, 80, 1029–1039. [Google Scholar] [CrossRef]
- Habib, A.F.; Alruzouq, R.I. Line-based modified iterated Hough transform for automatic registration of multi-source imagery. Photogramm. Rec. 2004, 19, 5–21. [Google Scholar] [CrossRef]
- Matabosch, C.; Salvi, J.; Fofi, D.; Meriaudeau, F. Range image registration for industrial inspection. In Machine Vision Applications in Industrial Inspection XIII.; International Society for Optics and Photonics: Bellingham, WA, USA, 2005; Volume 5679, pp. 216–227. [Google Scholar]
- Dutagaci, H.; Cheung, C.P.; Godil, A. Evaluation of 3D interest point detection techniques via human-generated ground truth. Vis. Comput. 2012, 28, 901–917. [Google Scholar] [CrossRef]
- Tombari, F.; Salti, S.; Di Stefano, L. Performance evaluation of 3D keypoint detectors. Int. J. Comput. Vis. 2013, 102, 198–220. [Google Scholar] [CrossRef]
- Kim, H.; Hilton, A. Evaluation of 3D feature descriptors for multi-modal data registration. In Proceedings of the 2013 International Conference on 3D Vision-3DV 2013, Seattle, WA, USA, 29 June–1 July 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 119–126. [Google Scholar]
- Johnson, A.E.; Hebert, M. Using spin images for efficient object recognition in cluttered 3D scenes. IEEE Trans. Pattern Anal. Mach. Intell. 1999, 21, 433–449. [Google Scholar] [CrossRef] [Green Version]
- Frome, A.; Huber, D.; Kolluri, R.; Bülow, T.; Malik, J. Recognizing Objects in Range Data Using Regional Point Descriptors, In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; Springer: Berlin, Germany, 2004; pp. 224–237. [Google Scholar]
- Tombari, F.; Salti, S.; Di Stefano, L. Unique Signatures of Histograms for Local Surface Description, In Proceedings of the European Conference on Computer Vision, Crete, Greece, 5–11 September 2010; Springer: Berlin, Germany, 2010; pp. 356–369. [Google Scholar]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast point feature histograms (FPFH) for 3D registration. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 3212–3217. [Google Scholar]
- Jaw, J.; Chuang, T. Feature-based registration of terrestrial lidar point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 303–308. [Google Scholar]
- Stamos, I.; Leordeanu, M. Automated feature-based range registration of urban scenes of large scale. In Proceedings of the 2003 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Madison, WI, USA, 18–20 June 2003; IEEE: Piscataway, NJ, USA, 2003; Volume 2, pp. II–Ii. [Google Scholar]
- Yao, J.; Ruggeri, M.R.; Taddei, P.; Sequeira, V. Automatic scan registration using 3D linear and planar features. 3D Research 2010, 1, 6. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. Method for registration of 3-D shapes. In Sensor Fusion IV: Control Paradigms and Data Structures; International Society for Optics and Photonics: Bellingham, WA, USA, 1992; Volume 1611, pp. 586–606. [Google Scholar]
- Chen, Y.; Medioni, G. Object modelling by registration of multiple range images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Habib, A.; Detchev, I.; Bang, K. A comparative analysis of two approaches for multiple-surface registration of irregular point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38. Available online: https://pdfs.semanticscholar.org/611e/5c7afe7c00529de2642c058e95871e210f73.pdf (accessed on 25 March 2020).
- Al-Durgham, M.; Detchev, I.; Habib, A. Analysis of two triangle-based multi-surface registration algorithms of irregular point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38. Available online: https://pdfs.semanticscholar.org/f153/ee5a9e306fe8d345f97be67a042c1eeb9bcb.pdf (accessed on 25 March 2020).
- Rusinkiewicz, S.; Levoy, M. Efficient variants of the ICP algorithm. In Proceedings of the Third International Conference on 3-D Digital Imaging and Modeling, Quebec City, QC, Canada, 28 May–1 June 2001; pp. 145–152. [Google Scholar]
- Hyyppä, J.; Wagner, W.; Hollaus, M.; Hyyppä, H. Airborne Laser Scanning; SAGE Publications Ltd.: London, UK, 2009. [Google Scholar]
- Rusu, R.B.; Blodow, N.; Marton, Z.C.; Beetz, M. Aligning point cloud views using persistent feature histograms. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 3384–3391. [Google Scholar]
- Pomerleau, F.; Colas, F.; Siegwart, R. A review of point cloud registration algorithms for mobile robotics. Found. Trends® Robot. 2015, 4, 1–104. [Google Scholar] [CrossRef] [Green Version]
- Al-Rawabdeh, A.; Al-Gurrani, H.; Al-Durgham, K.; Detchev, I.; He, F.; El-Sheimy, N.; Habib, A. A robust registration algorithm for point clouds from UAV images for change detection. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 765. [Google Scholar] [CrossRef]
- Al-Rawabdeh, A.; Moussa, A.; Foroutan, M.; El-Sheimy, N.; Habib, A. Time series UAV image-based point clouds for landslide progression evaluation applications. Sensors 2017, 17, 2378. [Google Scholar] [CrossRef] [Green Version]
- Lin, Y.-J.; Benziger, R.R.; Habib, A. Planar-based adaptive down-sampling of point clouds. Photogramm. Eng. Remote Sens. 2016, 82, 955–966. [Google Scholar] [CrossRef]
- Mandow, A.; Martínez, J.L.; Reina, A.J.; Morales, J. Fast range-independent spherical subsampling of 3D laser scanner points and data reduction performance evaluation for scene registration. Pattern Recognit. Lett. 2010, 31, 1239–1250. [Google Scholar] [CrossRef]
- Puttonen, E.; Lehtomäki, M.; Kaartinen, H.; Zhu, L.; Kukko, A.; Jaakkola, A. Improved sampling for terrestrial and mobile laser scanner point cloud data. Remote Sens. 2013, 5, 1754–1773. [Google Scholar] [CrossRef] [Green Version]
- Cabo, C.; Ordoñez, C.; García-Cortés, S.; Martínez, J. An algorithm for automatic detection of pole-like street furniture objects from Mobile Laser Scanner point clouds. Isprs J. Photogramm. Remote Sens. 2014, 87, 47–56. [Google Scholar] [CrossRef]
- Fan, L.; Atkinson, P.M. An iterative coarse-to-fine sub-sampling method for density reduction of terrain point clouds. Remote Sens. 2019, 11, 947. [Google Scholar] [CrossRef] [Green Version]
- Girardeau-Montaut, D. Cloudcompare-Open Source Project. Opensource Proj. 2011. Available online: https://www.danielgm.net/cc/ (accessed on 25 March 2020).
- Al-Durgham, M.M. The Registration and Segmentation of Heterogeneous Laser Scanning Data. Ph.D Thesis, The University of Calgary, Calgary, AB, Canada, 2014. [Google Scholar]
- Masuda, T.; Sakaue, K.; Yokoya, N. Registration and integration of multiple range images for 3-D model construction. In Proceedings of the 13th International Conference on Pattern Recognition, Vienna, Austria, 25–29 August 1996; IEEE: Piscataway, NJ, USA, 1996; Volume 1, pp. 879–883. [Google Scholar]
- Turk, G.; Levoy, M. Zippered Polygon Meshes from Range Images, In Proceedings of the 21st annual Conference on Computer Graphics and Interactive Techniques, Orlando, FL, USA, 24–29 July; ACM: New York, NY, USA, 1994; pp. 311–318. [Google Scholar]
- Weik, S. Registration of 3-D partial surface models using luminance and depth information. In Proceedings of the International Conference on Recent Advances in 3-D Digital Imaging and Modeling (Cat. No. 97TB100134), Ottawa, ON, USA, 12–15 May 1997; IEEE: Piscataway, NJ, USA, 1997; pp. 93–100. [Google Scholar]
- Lari, Z.; Habib, A. An adaptive approach for the segmentation and extraction of planar and linear/cylindrical features from laser scanning data. Isprs J. Photogramm. Remote Sens. 2014, 93, 192–212. [Google Scholar] [CrossRef]
- Belton, D.; Lichti, D.D. Classification and segmentation of terrestrial laser scanner point clouds using local variance information. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2006, 36, 44–49. [Google Scholar]
- Jutzi, B.; Gross, H. Nearest neighbour classification on laser point clouds to gain object structures from buildings. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2009, 38, 4–7. [Google Scholar]
- Weinmann, M.; Jutzi, B.; Mallet, C. Semantic 3D scene interpretation: A framework combining optimal neighborhood size selection with relevant features. Isprs Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 181. [Google Scholar] [CrossRef] [Green Version]
- Friedman, J.H.; Bentley, J.L.; Finkel, R.A. An algorithm for finding best matches in logarithmic expected time. Acm Trans. Math. Softw. 1977, 3, 209–226. [Google Scholar] [CrossRef]
- Demantké, J.; Mallet, C.; David, N.; Vallet, B. Dimensionality based scale selection in 3D lidar point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2011, 38, W12. [Google Scholar] [CrossRef] [Green Version]
- Horn, B.K.P. Extended gaussian images. Proc. IEEE 1984, 72, 1671–1686. [Google Scholar] [CrossRef]
- He, F.; Habib, A. Automated relative orientation of UAV-based imagery in the presence of prior information for the flight trajectory. Photogramm. Eng. Remote Sens. 2016, 82, 879–891. [Google Scholar] [CrossRef]
- He, F.; Zhou, T.; Xiong, W.; Hasheminnasab, S.M.; Habib, A. Automated aerial triangulation for UAV-based mapping. Remote Sens. 2018, 10, 1952. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| −0.15 | −0.38 | 0.27 | 3.5 | −2.8 | 1.6 |
| Noise (m) | ||||||
|---|---|---|---|---|---|---|
| Adaptive down-sampling | ||||||
| 0.01 | 0.002 | 0.001 | 0.002 | 0.002 | 0.003 | 0.001 |
| 0.02 | 0.001 | 0.002 | 0.002 | 0.004 | 0.005 | 0.002 |
| 0.03 | 0.001 | 0.010 | 0.012 | 0.011 | 0.002 | 0.010 |
| 0.04 | 0.011 | 0.001 | 0.014 | 0.010 | 0.008 | 0.019 |
| 0.05 | 0.003 | 0.022 | 0.006 | 0.005 | 0.019 | 0.011 |
| Gaussian sphere-based down-sampling | ||||||
| 0.01 | 0.004 | 0.003 | 0.001 | 0.002 | 0.001 | 0.001 |
| 0.02 | 0.007 | 0.010 | 0.002 | 0.003 | 0.006 | 0.004 |
| 0.03 | 0.009 | 0.011 | 0.011 | 0.007 | 0.003 | 0.007 |
| 0.04 | 0.009 | 0.004 | 0.006 | 0.012 | 0.016 | 0.028 |
| 0.05 | 0.004 | 0.025 | 0.007 | 0.011 | 0.027 | 0.031 |
| Number of Planar Point Features | Number of Down-Sampled Points for ICPatch | |
|---|---|---|
| Adaptive | 99,977 | 3944 |
| Gaussian Sphere | 99,977 | 3950 |
| Random | --- | 3944 |
| All Points | --- | 100,709 |
| Desired Point Density (pts/m2) | Total Number of Points | Number of Down-Sampled Points | |
|---|---|---|---|
| Real Dataset 1 | 20 | 143,779 | 23,059 |
| Real Dataset 2 | 50 | 1,983,108 | 184,912 |
| Real Dataset 3 | 20 | 5,812,514 | 20,420 |
| All Points | Adaptive | Gaussian Sphere | Random | |
|---|---|---|---|---|
| Real Dataset 1 | ||||
| RMSE (m) | 0.060 | 0.044 | 0.048 | 0.071 |
| Execution time (s) | 193.56 | 113.27 | 895.61 | 34.52 |
| Real Dataset 2 | ||||
| RMSE (m) | 0.050 | 0.029 | 0.033 | 0.050 |
| Execution time (s) | 3286.81 | 629.84 | 1617.63 | 334.76 |
| Real Dataset 3 | ||||
| RMSE (m) | 0.020 | 0.016 | 0.022 | 0.018 |
| Execution time (s) | 5425.13 | 300.44 | 1115.98 | 131.61 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Rawabdeh, A.; He, F.; Habib, A. Automated Feature-Based Down-Sampling Approaches for Fine Registration of Irregular Point Clouds. Remote Sens. 2020, 12, 1224. https://doi.org/10.3390/rs12071224
Al-Rawabdeh A, He F, Habib A. Automated Feature-Based Down-Sampling Approaches for Fine Registration of Irregular Point Clouds. Remote Sensing. 2020; 12(7):1224. https://doi.org/10.3390/rs12071224
Chicago/Turabian StyleAl-Rawabdeh, Abdulla, Fangning He, and Ayman Habib. 2020. "Automated Feature-Based Down-Sampling Approaches for Fine Registration of Irregular Point Clouds" Remote Sensing 12, no. 7: 1224. https://doi.org/10.3390/rs12071224
APA StyleAl-Rawabdeh, A., He, F., & Habib, A. (2020). Automated Feature-Based Down-Sampling Approaches for Fine Registration of Irregular Point Clouds. Remote Sensing, 12(7), 1224. https://doi.org/10.3390/rs12071224