City-Scale Distance Sensing via Bispectral Light Extinction in Bad Weather

Abstract
:
1. Introduction
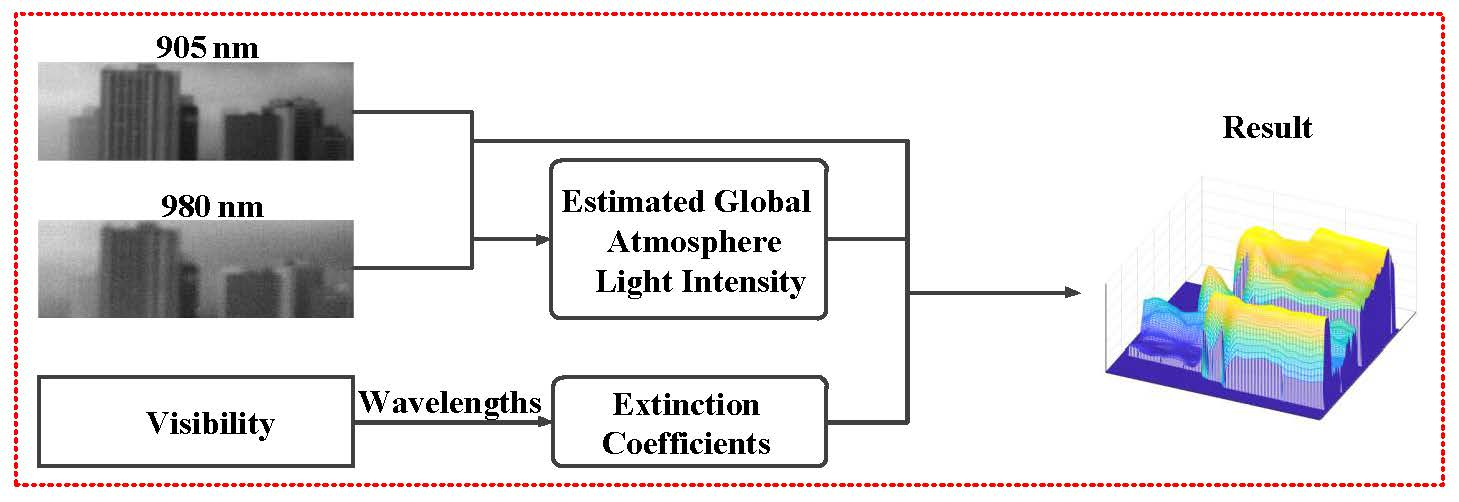
- We propose a novel framework to directly estimate the city-scale distance in bad weather by taking advantage of bispectral light extinction.
- We incorporate the visibility into our light attenuation model to account for the weather condition. By our knowledge, this is the first attempt to explicitly model the atmosphere interaction by visibility, an easily accessible meteorological data.
- We construct an actual bispectral imaging system and validate the superior performance of our method.
2. Related Works
3. Mechanisms of Light Scattering
4. A Bispectral Light Extinction Algorithm for Distance Sensing
4.1. Derivation of Distance Equation from Bispectral Light Imaging Theorem
4.2. Analysis of Spectral Reflectance of Material
4.3. Calculation of Extinction Coefficient
4.4. Wavelength Selection Strategy
- The reflectance spectrum difference should be minimised in two chosen near infrared wavelengths.
- The difference of the extinction coefficient should be maximised in two distinct near infrared wavelengths.
- The illumination intensity should be appropriate in the two selected near infrared wavelengths.
5. Experiment Results
5.1. System Configuration and Implementation Details
5.2. Error and Accuracy Metrics
- Average relative error (rel): ;
- Root mean squared error (rms):;
- Average error (): ;
- Accuracy with threshold : percentage (%) of s.t.:max ;
5.3. Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- He, K.; Sun, J.; Tang, X. Single image haze removal using dark channel prior. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 33, 2341–2353. [Google Scholar] [PubMed]
- Ancuti, C.O.; Ancuti, C. Single image dehazing by multi-scale fusion. IEEE Trans. Image Process. 2013, 22, 3271–3282. [Google Scholar] [CrossRef] [PubMed]
- Yin, S.; Wang, Y.; Yang, Y.H. A Novel Residual Dense Pyramid Network for Image Dehazing. Entropy 2019, 21, 1123. [Google Scholar] [CrossRef] [Green Version]
- Gu, Z.; Zhan, Z.; Yuan, Q.; Yan, L. Single Remote Sensing Image Dehazing Using a Prior-Based Dense Attentive Network. Remote Sens. 2019, 24, 3008. [Google Scholar] [CrossRef] [Green Version]
- Kim, M.; Yu, S.; Park, S.; Lee, S.; Paik, J. Image dehazing and enhancement using principal component analysis and modified haze features. Appl. Sci. 2018, 8, 1321. [Google Scholar] [CrossRef] [Green Version]
- Fu, X.; Huang, J.; Ding, X.; Liao, Y.; Paisley, J. Clearing the skies: A deep network architecture for single-image rain removal. IEEE Trans. Image Process. 2017, 26, 2944–2956. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nayar, S.K.; Narasimhan, S.G. Vision in bad weather. In Proceedings of the IEEE International Conference on Computer Vision, Kerkyra, Corfu, Greece, 20–25 September 1999; pp. 820–827. [Google Scholar]
- Cozman, F.; Krotkov, E. Depth from scattering. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Juan, PR, USA, 17–19 June 1997; pp. 801–806. [Google Scholar]
- Narasimhan, S.G.; Nayar, S.K. Chromatic framework for vision in bad weather. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Hilton Head, SC, USA, 13–15 June 2000; pp. 598–605. [Google Scholar]
- Narasimhan, S.G.; Nayar, S.K. Vision and the atmosphere. Int. J. Comput. Vis. 2002, 48, 233–254. [Google Scholar] [CrossRef]
- Asano, Y.; Zheng, Y.; Nishino, K.; Sato, I. Shape from water: Bispectral light absorption for depth recovery. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 635–649. [Google Scholar]
- Karsch, K.; Liu, C.; Kang, S.B. Depth transfer: Depth extraction from video using non-parametric sampling. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 2144–2158. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lenz, I.; Lee, H.; Saxena, A. Deep learning for detecting robotic grasps. Int. J. Robot. Res. 2015, 34, 705–724. [Google Scholar] [CrossRef] [Green Version]
- Zhao, D.; Gu, L.; Qian, K.; Zhou, H.; Yang, T.; Cheng, K. Target tracking from infrared imagery via an improved appearance model. Infrared Phys. Technol. 2020, 104, 103116. [Google Scholar] [CrossRef]
- Xie, J.; Girshick, R.; Farhadi, A. Deep3d: Fully automatic 2d-to-3d video conversion with deep convolutional neural networks. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 842–857. [Google Scholar]
- Zeng, H.; Wu, J.; Furukawa, Y. Neural procedural reconstruction for residential buildings. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 737–753. [Google Scholar]
- Karsch, K.; Sunkavalli, K.; Hadap, S.; Carr, N.; Jin, H.; Fonte, R.; Sittig, M.; Forsyth, D. Automatic scene inference for 3d object compositing. ACM Trans. Graph. 2014, 33, 32. [Google Scholar] [CrossRef]
- Cui, Y.; Schuon, S.; Chan, D.; Thrun, S.; Theobalt, C. 3D shape scanning with a time-of-flight camera. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 1173–1180. [Google Scholar]
- Seitz, S.M.; Curless, B.; Diebel, J.; Scharstein, D.; Szeliski, R. A comparison and evaluation of multi-view stereo reconstruction algorithms. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006; pp. 519–528. [Google Scholar]
- Batlle, J.; Mouaddib, E.; Salvi, J. Recent progress in coded structured light as a technique to solve the correspondence problem: A survey. Pattern Recognit. 1998, 31, 963–982. [Google Scholar] [CrossRef]
- Zhang, R.; Tsai, P.S.; Cryer, J.E.; Shah, M. Shape-from-shading: A survey. IEEE Trans. Pattern Anal. Mach. Intell. 1999, 21, 690–706. [Google Scholar] [CrossRef] [Green Version]
- Woodham, R.J. Photometric method for determining surface orientation from multiple images. Opt. Eng. 1980, 19, 191139. [Google Scholar] [CrossRef]
- Gu, L.; Robles-Kelly, A. Shadow detection via rayleigh scattering and mie theory. In Proceedings of the 21st International Conference on Pattern Recognition, Tsukuba, Japan, 11–15 November 2012; pp. 2165–2168. [Google Scholar]
- Tan, R.T. Visibility in bad weather from a single image. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Anchorage, Alaska, USA, 24–26 June 2008; pp. 1–8. [Google Scholar]
- Saxena, A.; Sun, M.; Ng, A.Y. Make3d: Learning 3d scene structure from a single still image. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 31, 824–840. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, B.; Shen, C.; Dai, Y.; Van Den Hengel, A.; He, M. Depth and surface normal estimation from monocular images using regression on deep features and hierarchical crfs. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1119–1127. [Google Scholar]
- Liu, F.; Shen, C.; Lin, G. Deep convolutional neural fields for depth estimation from a single image. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 5162–5170. [Google Scholar]
- Ladicky, L.; Shi, J.; Pollefeys, M. Pulling things out of perspective. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 89–96. [Google Scholar]
- Godard, C.; Mac Aodha, O.; Brostow, G.J. Unsupervised monocular depth estimation with left-right consistency. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 270–279. [Google Scholar]
- Flynn, J.; Neulander, I.; Philbin, J.; Snavely, N. Deepstereo: Learning to predict new views from the world’s imagery. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 5515–5524. [Google Scholar]
- Narasimhan, S.G.; Nayar, S.K.; Sun, B.; Koppal, S.J. Structured light in scattering media. In Proceedings of the IEEE International Conference on Computer Vision, Beijing, China, 17–20 October 2005; pp. 420–427. [Google Scholar]
- Middleton, W.E.K. Vision through the Atmosphere; University of Toronto Press: Toronto, ON, Canada, 1952. [Google Scholar]
- Horvath, H. On the applicability of the Koschmieder visibility formula. Atmos. Environ. 1971, 5, 177–184. [Google Scholar] [CrossRef]
- Nebuloni, R. Empirical relationships between extinction coefficient and visibility in fog. Appl. Opt. 2005, 44, 3795–3804. [Google Scholar] [CrossRef] [PubMed]
- Grabner, M.; Kvicera, V. The wavelength dependent model of extinction in fog and haze for free space optical communication. Opt. Express 2011, 19, 3379–3386. [Google Scholar] [CrossRef] [PubMed]
- Matsuzawa, M.; Takeuchi, M. A study of methods to estimate visibility based on weather conditions. J. Jpn. Soc. Snow Ice 2002, 64, 77–85. [Google Scholar] [CrossRef] [Green Version]
- Available online: https://www.jma.go.jp/jma/kishou/know/kansoku_guide/tebiki.pdf (accessed on 28 April 2020).
- Vaida, V.; Daniel, J.S.; Kjaergaard, H.G.; Goss, L.M.; Tuck, A.F. Atmospheric absorption of near infrared and visible solar radiation by the hydrogen bonded water dimer. Q. J. R. Meteorol. Soc. 2001, 127, 1627–1643. [Google Scholar] [CrossRef]
- Available online: https://www.google.co.jp/maps (accessed on 28 April 2020).
- Grosse, R.; Johnson, M.K.; Adelson, E.H.; Freeman, W.T. Ground truth dataset and baseline evaluations for intrinsic image algorithms. In Proceedings of the IEEE International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009; pp. 2335–2342. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenes/V = 6.4 km | Error (Lower is Better) | Accuracy (Higher is Better) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Our Method | Comparison Method | Our Method | Comparison Method | |||||||||
| rel | rms | rel | rms | |||||||||
| 1 | 0.094 | 0.039 | 0.518 | 0.354 | 0.132 | 1.999 | 0.941 | 0.979 | 0.985 | 0.428 | 0.746 | 0.903 |
| 2 | 0.078 | 0.033 | 0.439 | 0.125 | 0.051 | 0.706 | 0.949 | 0.981 | 0.986 | 0.801 | 0.931 | 0.976 |
| 3 | 0.066 | 0.030 | 0.391 | 0.326 | 0.123 | 1.843 | 0.953 | 0.982 | 0.988 | 0.482 | 0.784 | 0.913 |
| Average | 0.079 | 0.034 | 0.449 | 0.268 | 0.102 | 1.516 | 0.948 | 0.981 | 0.986 | 0.570 | 0.820 | 0.931 |
| Scenes/V = 3.2 km | Error (Lower is Better) | Accuracy (Higher is Better) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Our Method | Comparison Method | Our Method | Comparison Method | |||||||||
| rel | rms | rel | rms | |||||||||
| 4 | 0.077 | 0.033 | 0.251 | 0.402 | 0.147 | 1.311 | 0.946 | 0.978 | 0.986 | 0.415 | 0.731 | 0.901 |
| 5 | 0.087 | 0.037 | 0.271 | 0.175 | 0.070 | 0.543 | 0.948 | 0.980 | 0.987 | 0.718 | 0.899 | 0.962 |
| 6 | 0.063 | 0.028 | 0.163 | 0.218 | 0.086 | 0.565 | 0.950 | 0.983 | 0.990 | 0.679 | 0.891 | 0.929 |
| Average | 0.076 | 0.033 | 0.228 | 0.265 | 0.101 | 0.806 | 0.948 | 0.981 | 0.988 | 0.604 | 0.840 | 0.931 |
| Scenes/V = 6.4 km | Error (Lower is Better) | Accuracy (Higher is Better) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Our Method | Comparison Method | Our Method | Comparison Method | |||||||||
| rel | rms | rel | rms | |||||||||
| 1 | 0.095 | 0.040 | 0.534 | 0.342 | 0.129 | 1.932 | 0.945 | 0.978 | 0.986 | 0.458 | 0.756 | 0.911 |
| 2 | 0.072 | 0.030 | 0.409 | 0.152 | 0.063 | 0.859 | 0.949 | 0.981 | 0.989 | 0.782 | 0.921 | 0.974 |
| 3 | 0.063 | 0.028 | 0.353 | 0.314 | 0.120 | 1.742 | 0.951 | 0.983 | 0.990 | 0.497 | 0.805 | 0.923 |
| Average | 0.077 | 0.032 | 0.432 | 0.269 | 0.096 | 1.511 | 0.948 | 0.981 | 0.988 | 0.579 | 0.827 | 0.936 |
| Scenes/V = 3.2 km | Error (Lower is Better) | Accuracy (Higher is Better) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Our Method | Comparison Method | Our Method | Comparison Method | |||||||||
| rel | rms | rel | rms | |||||||||
| 4 | 0.076 | 0.032 | 0.249 | 0.391 | 0.146 | 1.273 | 0.948 | 0.979 | 0.987 | 0.423 | 0.735 | 0.901 |
| 5 | 0.085 | 0.035 | 0.261 | 0.171 | 0.069 | 0.531 | 0.949 | 0.982 | 0.989 | 0.721 | 0.901 | 0.964 |
| 6 | 0.062 | 0.026 | 0.161 | 0.204 | 0.081 | 0.529 | 0.951 | 0.983 | 0.991 | 0.686 | 0.895 | 0.949 |
| Average | 0.074 | 0.031 | 0.224 | 0.255 | 0.099 | 0.788 | 0.949 | 0.981 | 0.989 | 0.610 | 0.844 | 0.938 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, D.; Asano, Y.; Gu, L.; Sato, I.; Zhou, H. City-Scale Distance Sensing via Bispectral Light Extinction in Bad Weather. Remote Sens. 2020, 12, 1401. https://doi.org/10.3390/rs12091401
Zhao D, Asano Y, Gu L, Sato I, Zhou H. City-Scale Distance Sensing via Bispectral Light Extinction in Bad Weather. Remote Sensing. 2020; 12(9):1401. https://doi.org/10.3390/rs12091401
Chicago/Turabian StyleZhao, Dong, Yuta Asano, Lin Gu, Imari Sato, and Huixin Zhou. 2020. "City-Scale Distance Sensing via Bispectral Light Extinction in Bad Weather" Remote Sensing 12, no. 9: 1401. https://doi.org/10.3390/rs12091401