
Sequential Ambiguity Resolution Method for Poorly-Observed GNSS Data


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Satellite Selection Criteria for an Initial Ambiguity Resolution
2.2. The Correcting Method for DD Equation
2.3. Evaluation for the Proposed Method
- Set the SPP float solution as the initial solution .
- Substitute the initial fixed solution for the initial solution if the selected ambiguities are fixed. Otherwise, apply the Kalman filter to the initial solution and substitute its solution for the initial solution .
- Apply the generalized least square method to correct the DD equations and update the RTK parameters.
- Set the fixed solution for the sequential fixed solution if the ambiguities for all satellites are fixed. Otherwise, apply the Kalman filter to the initial fixed solution and substitute its solution for the sequential float solution .
- Calculate the solution difference . If , the sequential fixed solution is output as the final fixed solution . Otherwise, set the sequential fixed solution as the sequential float solution and return to step 3.
- Obtain the residual difference . If the , the sequential float solution will be output as the final float solution . Otherwise, return to step 3.
3. Experiments
3.1. Experiment for Satellite Selection Criteria
3.2. Experiment for the DD Iterative Correction Equation
3.3. Experiment for Feasibility and Superiority
3.3.1. Feasibility Experiment
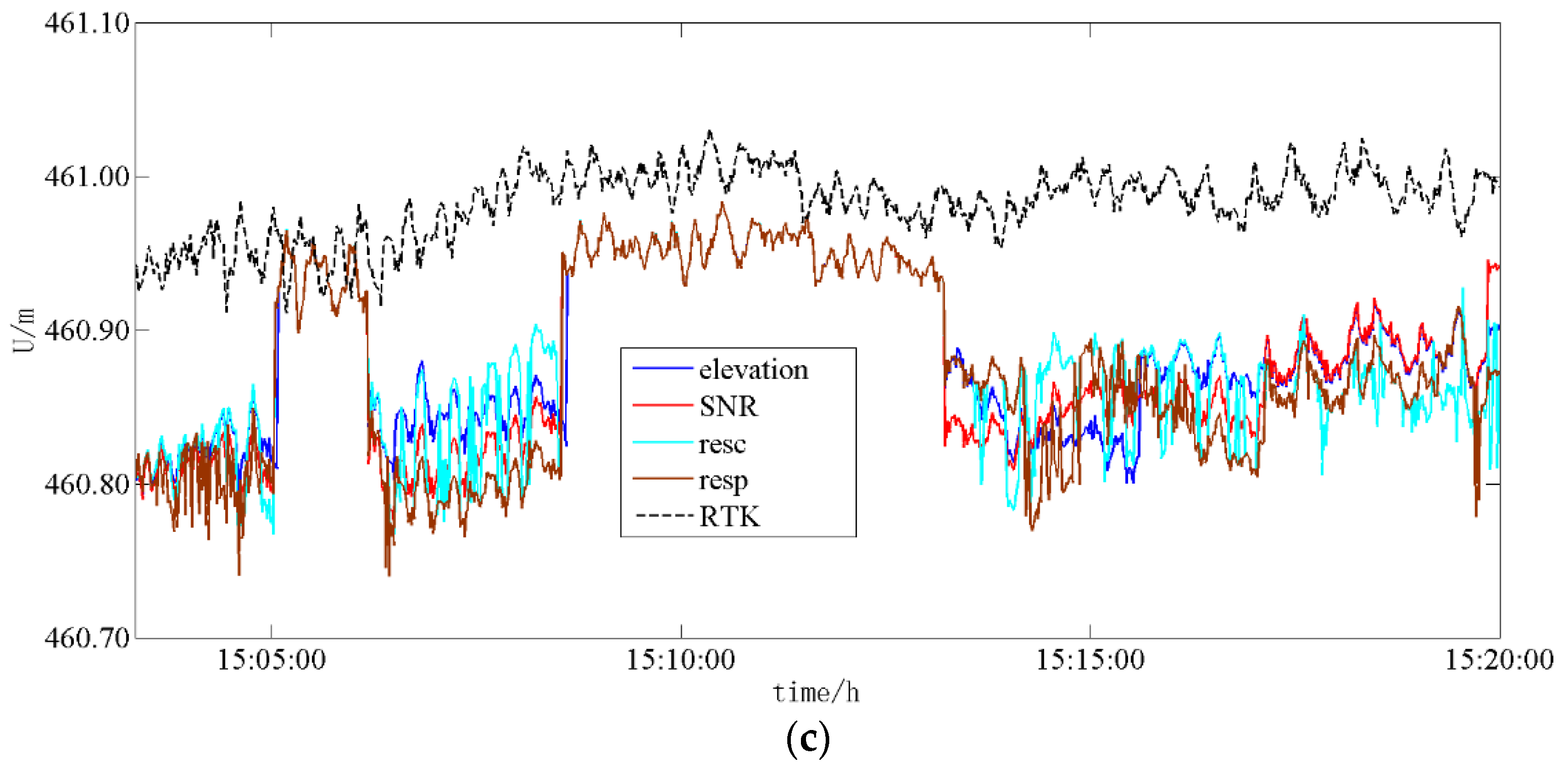
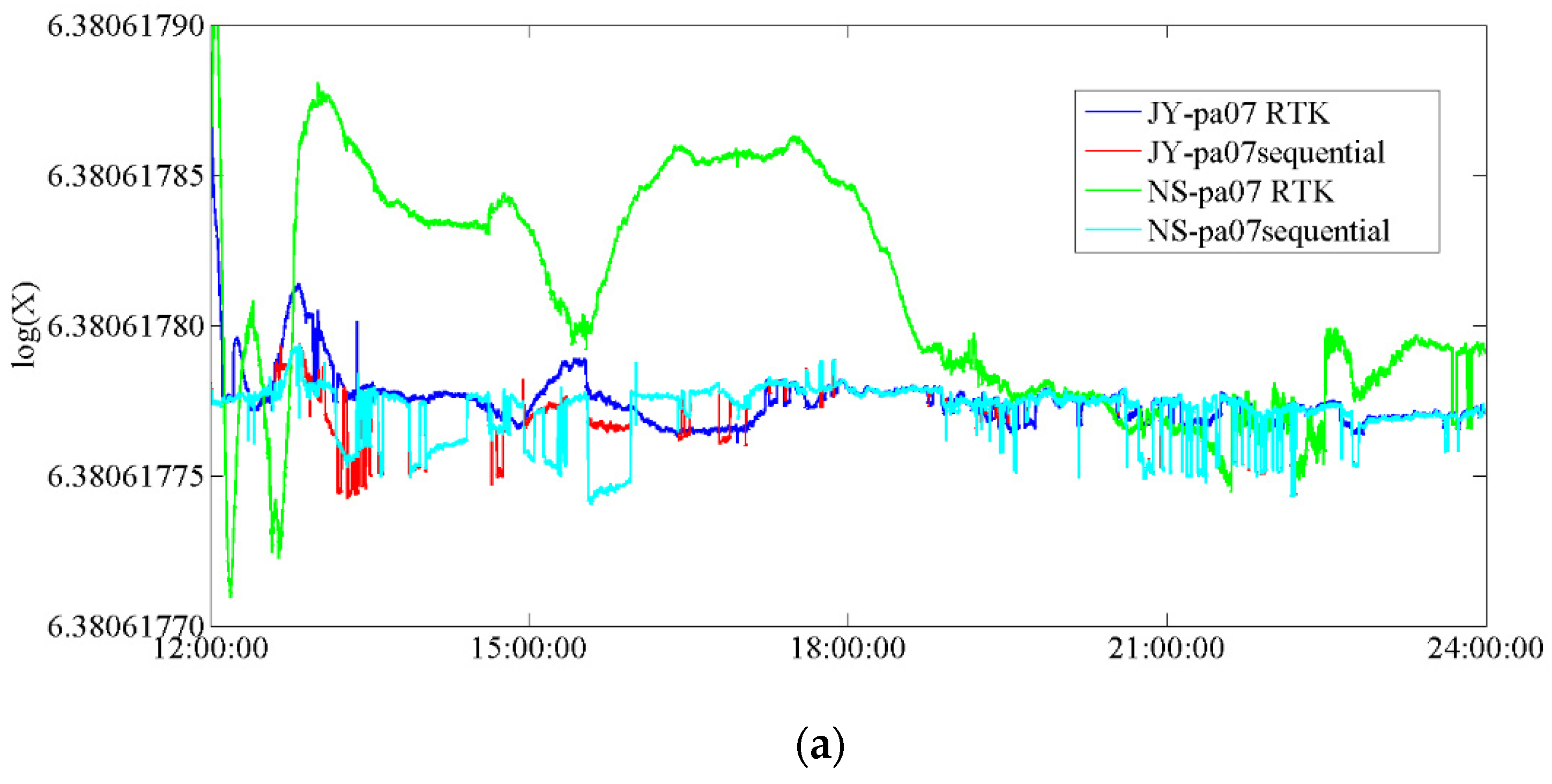
3.3.2. Superiority Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Teunissen, P.J.G. A New Method for Fast Carrier Phase Ambiguity Estimation. In Proceedings of the Position Location and Navigation Symposium, Las Vegas, NV, USA, 11–15 April 1994. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Dick, G.; Zhang, F. Improving carrier-phase ambiguity resolution in global GPS network solutions. J. Geod. 2005, 79, 103–110. [Google Scholar] [CrossRef]
- Feng, Y. GNSS three carrier ambiguity resolution using ionosphere-reduced virtual signals. J. Geod. 2008, 82, 847–862. [Google Scholar] [CrossRef]
- Xu, P.; Sh, C.; Liu, J. Integer estimation methods for GPS ambiguity resolution: An applications oriented review and improvement. Survey Rev. 2012, 44, 59–71. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Gao, C.; Pan, S. Single-Epoch Integer Ambiguity Resolution for Long-Baseline RTK with Ionosphere and Troposphere Estimation; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Gong, X.; Lou, Y.; Liu, W.; Zheng, F.; Gu, S.; Wang, H. Rapid ambiguity resolution over medium-to-long baselines based on GPS/BDS multi-frequency observables. Adv. Space Res. 2016, 59, 794–803. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, X. New Technology of Satellite Navigation and Positioning and High Precision Data Processing Method; Wuhan University Press: Wuhan, China, 2009. [Google Scholar]
- Parkins, A. Increasing GNSS RTK availability with a new single-epoch batch partial ambiguity resolution algorithm. Gps Solut. 2011, 15, 391–402. [Google Scholar] [CrossRef]
- Brack, A. Reliable GPS + BDS RTK positioning with partial ambiguity resolution. Gps Solut. 2017, 21, 1083–1092. [Google Scholar] [CrossRef]
- Gao, W.; Gao, C.; Pan, S. A method of GPS/BDS/GLONASS combined RTK positioning for middle-long baseline with partial ambiguity resolution. Emp. Surv. Rev. 2015, 49, 212–220. [Google Scholar] [CrossRef]
- Wang, J.; Xu, C.; Wang, J. Applications of robust Kalman filtering schemes in GNSS navigation. In Proceedings of the International Symposium on GPS/GNSS 2008, Tokyo, Japan, 11–14 November 2008; pp. 308–316. [Google Scholar]
- Barreau, V.; Vigneau, W.; Macabiau, C.; Deambrogio, L. Kalman Filter based robust GNSS signal tracking algorithm in presence of ionospheric scintillations. In Proceedings of the Satellite Navigation Technologies & European Workshop on Gnss Signals & Signal Processing, Noordwijk, The Netherlands, 5–7 December 2012. [Google Scholar]
- Su, Y.; Liu, H.; Yue, J.; Yang, Y. Characterization of ionospheric amplitude scintillations using wavelet entropy detrended GNSS data. Adv. Space Res. 2014, 54, 2172–2183. [Google Scholar] [CrossRef]
- Ruan, H.; Zhang, L.; Luo, Y.; Long, T. GNSS Carrier Phase Tracking with Discrete Wavelet Transform Filtering under Ionospheric Scintillation. IEEE Commun. Lett. 2016, 21, 394–397. [Google Scholar] [CrossRef]
- Dogatovic, M.; Stanojevic, M. Multipath mitigation of GPS signal using sequential Monte-Carlo filter. In Proceedings of the 2009 9th International Conference on Telecommunication in Modern Satellite, Cable, and Broadcasting Services, Nis, Serbia, 7–9 October 2009. [Google Scholar] [CrossRef]
- Zhang, S.; Zhao, L.; Li, X.; Bing, C. A sequential and partial ambiguity resolution strategy for improving the initialization performance of medium-baseline relative positioning. Earth Planets Space 2016. [Google Scholar] [CrossRef] [Green Version]
- Ronald, H. Method and Apparatus for Precision Attitude Determination and Kinematic Positioning. U.S. Patent 4,963,889, 16 October 1990. [Google Scholar]
- Klobuchar, J.A. Ionospheric time-delay algorithms for single-frequency GPS users. IEEE Trans. Aerosp. Electron. Syst. 1987, 23, 325–331. [Google Scholar] [CrossRef]
- Sastamoinen, J. Atmospheric correction for troposphere and stratosphere in radio ranging of satellites, in the use of artifical satellites for geodesy. Geophys. Monogr. Ser. 1972, 52, 485. [Google Scholar]
- Brunini, C.; Azpilicueta, F. GPS slant total electron content accuracy using the single layer model under different geomagnetic regions and ionospheric conditions. J. Geod. 2010, 84, 293–304. [Google Scholar] [CrossRef]
- Chen, D. Research on Fast Ambiguity Fixing and Regional Error Modeling Method of Beidou Medium and Long-Distance Reference Station; Wuhan University: Wuhan, China, 2016. [Google Scholar]
- Li, Z. GPS Measurement and Data Processing; Wuhan University Press: Wuhan, China, 2016. [Google Scholar]
- Teunissen, P.J.G. An optimality property of the integer least-squares estimator. J. Geod. 1999, 73, 587–593. [Google Scholar] [CrossRef]
- Baltagi, B.H. Generalized Least Squares; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Integer aperture GNSS ambiguity resolution. Artif. Satell. 2003, 38, 79–88. [Google Scholar]
- Teunissen, P.J.G.; Verhagen, S. Integer Aperture Estimation—A Framework for GNSS Ambiguity Acceptance Testing. Inside Gnss 2011, March/April, 66–73. [Google Scholar]
- Teunissen, P.J.G.; Verhagen, S. The GNSS ambiguity ratio-test revisited: A better way of using it. Emp. Surv. Rev. 2009, 41, 138–151. [Google Scholar] [CrossRef]
- Li, H.; Nie, G.; Chen, D.; Wu, S.; Wang, K. Constrained MLAMBDA Method for Multi-GNSS Structural Health Monitoring. Sensors 2019, 19, 4462. [Google Scholar] [CrossRef] [PubMed] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station | Receiver (Type) | Antenna (Type) |
|---|---|---|
| Base | TRIMBLE NETR9 (4.43) | TRIMBLE TRM55971.00 (NONE) |
| Rover | NSC200 | HXCCSX601A |
| Processing Model | Ambiguity Success Rate (%) | Internal Precision (mm) | |||
|---|---|---|---|---|---|
| RTK model | 36.1 | 142.4 | 139.5 | 786.9 | 811.7 |
| elevation model | 78.5 | 131.6 | 124.6 | 736.6 | 758.6 |
| SNR model | 82.5 | 133.2 | 126.1 | 747.1 | 769.3 |
| resc model | 80.8 | 132.9 | 126.1 | 745.0 | 767.2 |
| resp model | 81.6 | 132.2 | 125.9 | 742.8 | 764.9 |
| Station | Receiver (Type) | Antenna (Type) |
|---|---|---|
| Base | ComNav (55.0) | Trimble Zephyr Geodetic 2 |
| Rover | ComNav (55.0) | Trimble Zephyr Geodetic 2 |
| Satellite System | Process Model | Ambiguity Success Rate (%) | Epoch-to-First Fixed Ambiguity |
|---|---|---|---|
| GPS | Elevation model | 99.5 | 1 |
| RTK model | 87.2 | 36 | |
| BDS | Elevation model | 100 | 1 |
| RTK model | 99.7 | 47 | |
| GLONASS | Elevation model | 96.2 | 37 |
| RTK model | 83.1 | 2234 | |
| GPS+BDS+GLONASS | Elevation model | 96.2 | 115 |
| RTK model | 28.4 | 147 |
| Station | Receiver (Type) | Antenna (Type) |
|---|---|---|
| Base | TRIMBLE NETR9 (4.81) | TRIMBLE TRM55971.00 (NONE) |
| Rover | TRIMBLE NETR9 (4.43) | TRIMBLE TRM55971.00 (NONE) |
| Station | Receiver (Type) | Antenna (Type) |
|---|---|---|
| Base JY | TRIMBLE NETR9 (4.43) | TRIMBLE TRM55971.00 (NONE) |
| Base NS | TRIMBLE NETR9 (4.43) | TRIMBLE TRM55971.00 (NONE) |
| Rover | NSC200 | HXCCSX601A |
| Items | MP1 1 | MP2 2 |
|---|---|---|
| mean rms(m) | 0.194438 | 0.177474 |
| obs | 1470842 | 1470842 |
| slips | 179 | 200 |
| rvr L1 slips | 927 | 927 |
| rvr L2 slips | 2192 | 2192 |
| Base Station | Processing Model | Ambiguity Success Rate (%) | The Average Coordinate of the Solution (m) | ||
|---|---|---|---|---|---|
| X | Y | Z | |||
| JY | RTK model | 36.1 | −24****7.4964 | 53****1.3489 | 24****5.0622 |
| sequential model | 83.6 | −24****7.5914 | 53****1.3758 | 24****5.0416 | |
| NS | RTK model | 16.4 | −24****7.6341 | 53****1.2684 | 24****5.0562 |
| sequential model | 67.6 | −24****7.5921 | 53****1.3778 | 24****5.0427 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Nie, G.; Wu, S.; He, Y. Sequential Ambiguity Resolution Method for Poorly-Observed GNSS Data. Remote Sens. 2021, 13, 2106. https://doi.org/10.3390/rs13112106
Li H, Nie G, Wu S, He Y. Sequential Ambiguity Resolution Method for Poorly-Observed GNSS Data. Remote Sensing. 2021; 13(11):2106. https://doi.org/10.3390/rs13112106
Chicago/Turabian StyleLi, Haiyang, Guigen Nie, Shuguang Wu, and Yuefan He. 2021. "Sequential Ambiguity Resolution Method for Poorly-Observed GNSS Data" Remote Sensing 13, no. 11: 2106. https://doi.org/10.3390/rs13112106
APA StyleLi, H., Nie, G., Wu, S., & He, Y. (2021). Sequential Ambiguity Resolution Method for Poorly-Observed GNSS Data. Remote Sensing, 13(11), 2106. https://doi.org/10.3390/rs13112106