
Characterizing Off-Highway Road Use with Remote-Sensing, Social Media and Crowd-Sourced Data: An Application to Grizzly Bear (Ursus Arctos) Habitat

 , , and
, , and
Abstract
:
1. Introduction
2. Materials and Methods
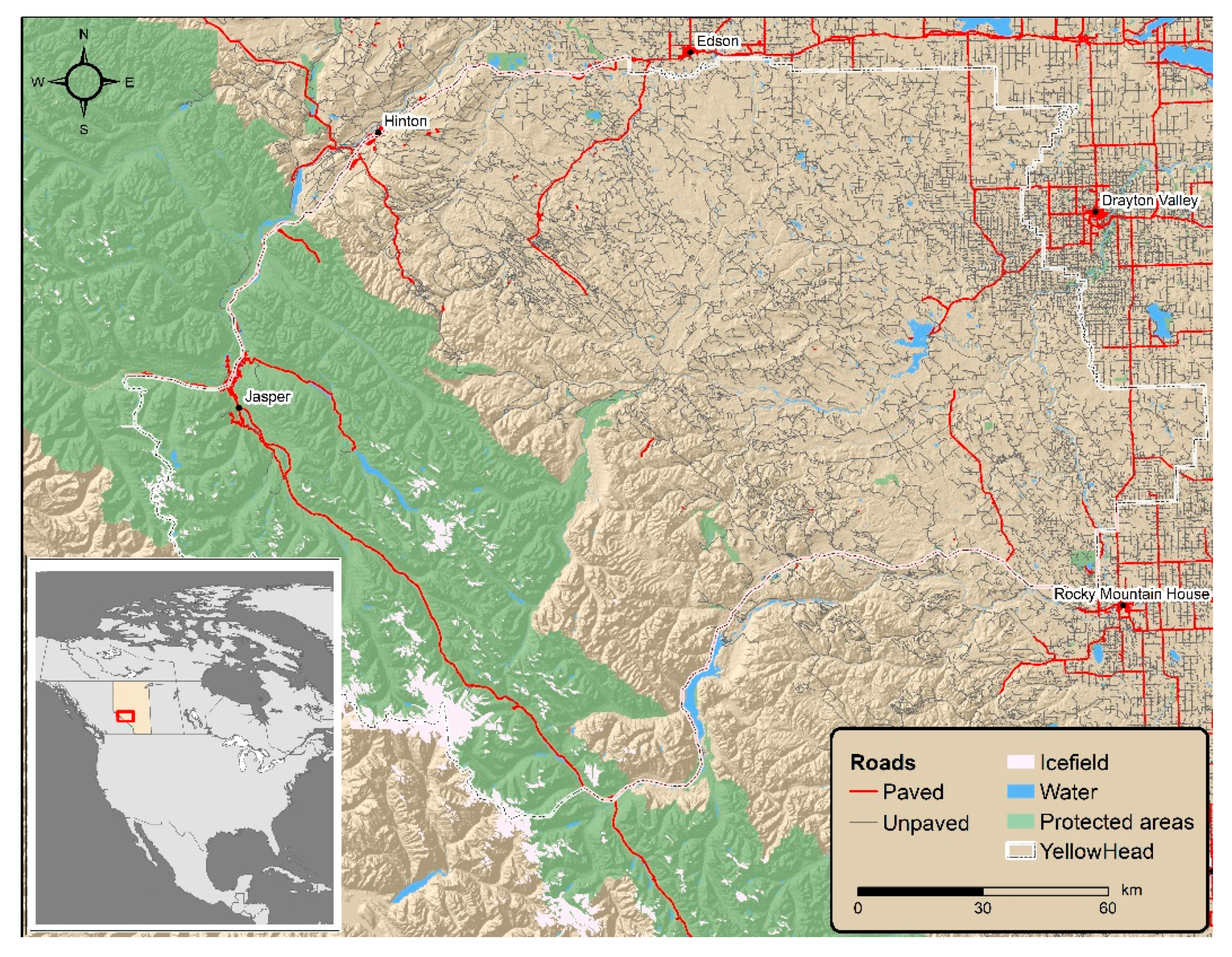
2.1. Study Area
2.2. Reference Classification
2.2.1. Provincial Road Data
2.2.2. Classification Method
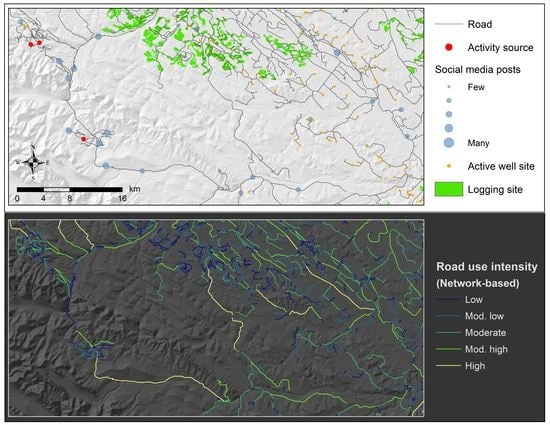
2.3. Network-Based Classification
2.3.1. Human Activity Data
2.3.2. Classification Method
2.4. Image-Based Classification
2.4.1. App-Based Road Data
2.4.2. Satellite Data
2.4.3. Classification Method
2.5. Statistical Analysis
2.5.1. Road Classification
2.5.2. Grizzly Bear Response to Roads
3. Results
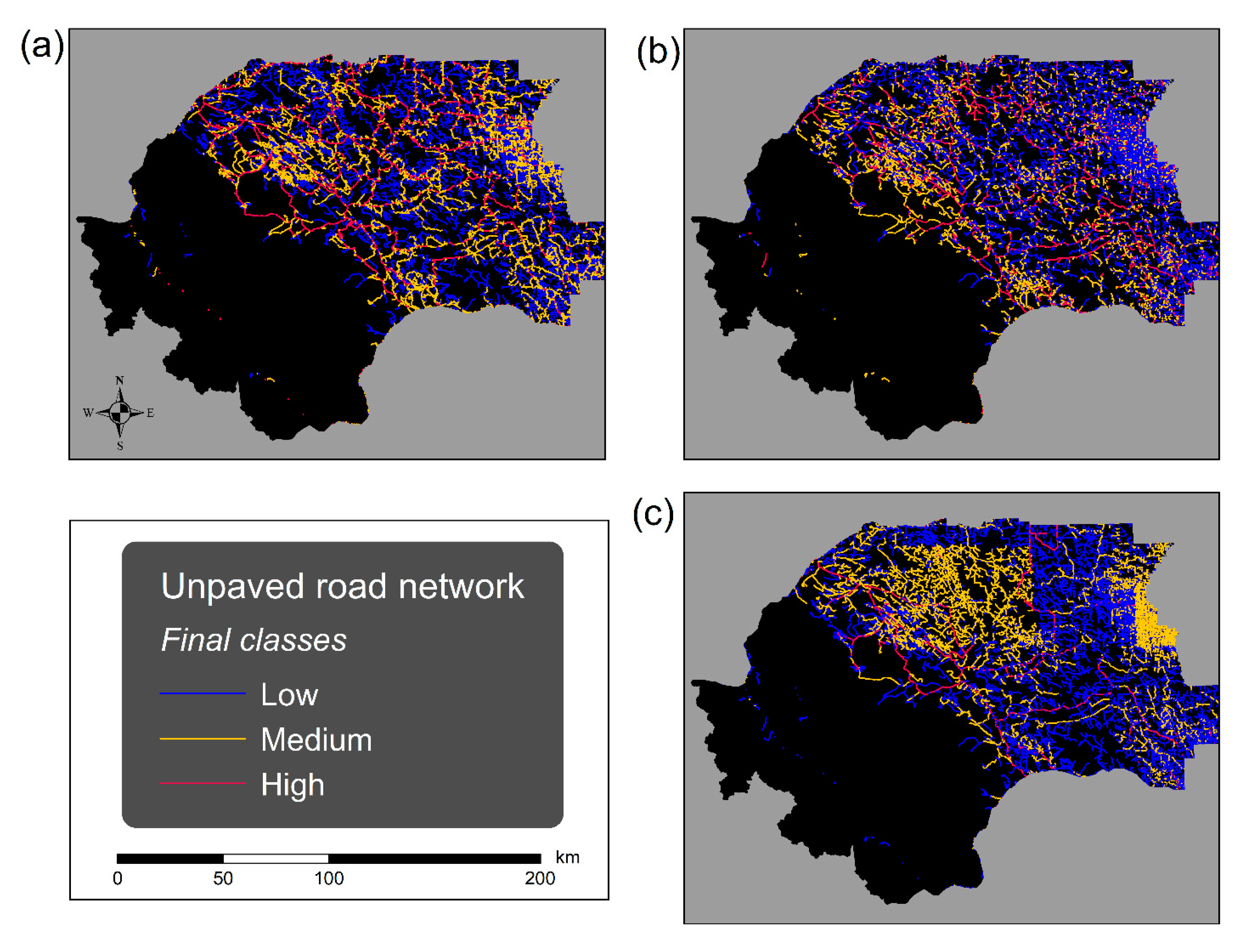
3.1. Road Classification
3.2. Grizzly Bear Response To Roads
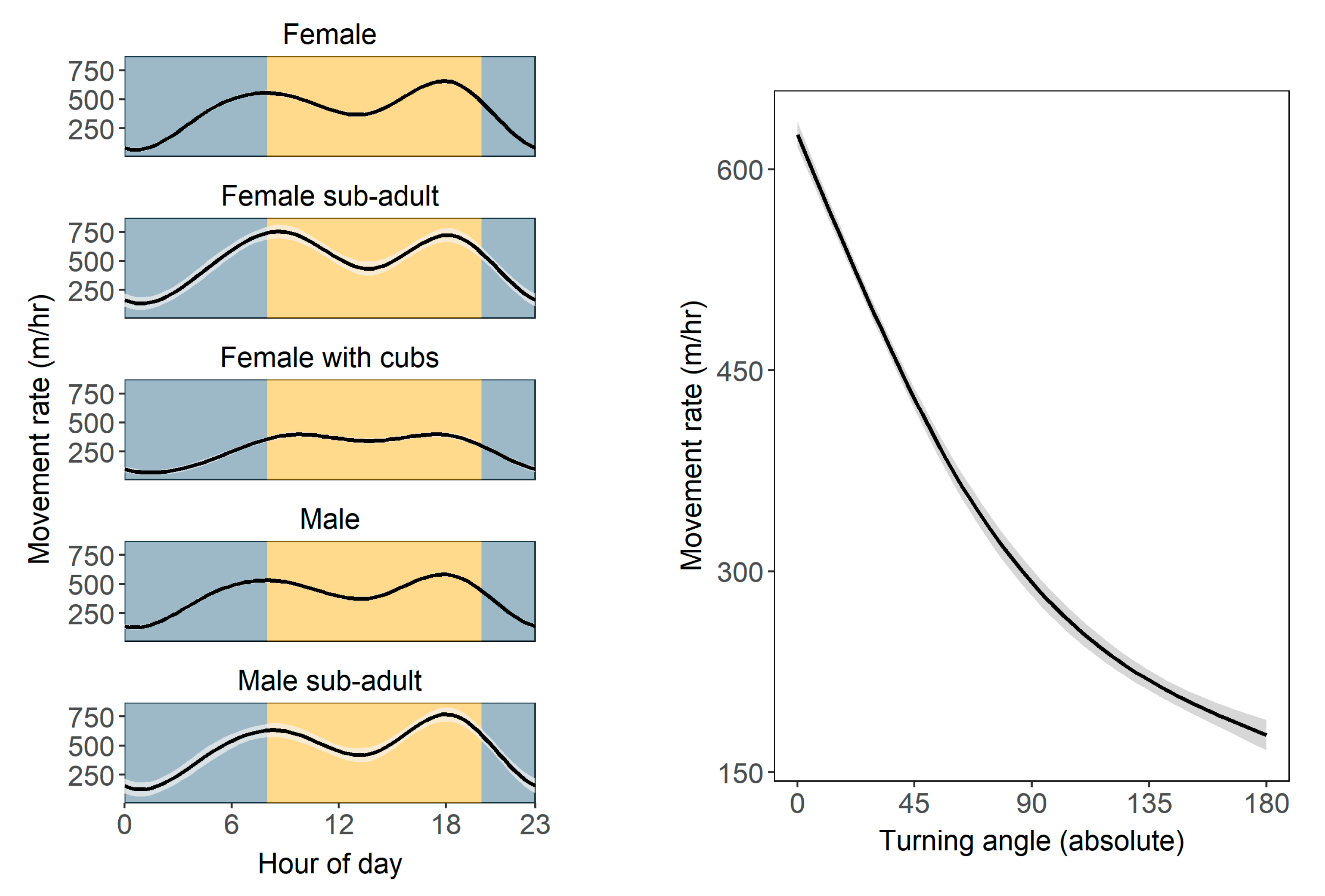
3.2.1. Grizzly Bear Movement
3.2.2. Grizzly Bear Selection
4. Discussion
4.1. Road Classification
4.2. Grizzly Bear Response to Roads
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Benítez-López, A.; Alkemade, R.; Verweij, P.A. The impacts of roads and other infrastructure on mammal and bird populations: A meta-analysis. Biol. Conserv. 2010, 143, 1307–1316. [Google Scholar] [CrossRef] [Green Version]
- Bennett, V.J.; Betts, M.G.; Smith, W.P. Toward Understanding the Ecological Impact of Transportation Corridors; U.S. Department of Agriculture, Forest Service, Pacific Northwest Research Station: Portland, OR, USA, 2011. [Google Scholar]
- Boulanger, J.; Stenhouse, G.B. The impact of roads on the demography of grizzly bears in Alberta. PLoS ONE 2014, 9, e115535. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Prokopenko, C.M.; Boyce, M.S.; Avgar, T. Characterizing wildlife behavioural responses to roads using integrated step selection analysis. J. Appl. Ecol. 2017, 54, 470–479. [Google Scholar] [CrossRef]
- Proctor, M.F.; McLellan, B.N.; Stenhouse, G.B.; Mowat, G.; Lamb, C.T.; Boyce, M.S. Effects of roads and motorized human access on grizzly bear populations in British Columbia and Alberta, Canada. Ursus 2019, 2019, 16–39. [Google Scholar] [CrossRef] [Green Version]
- Koen, E.L.; Bowman, J.; Sadowski, C.; Walpole, A.A. Landscape connectivity for wildlife: Development and validation of multispecies linkage maps. Methods Ecol. Evol. 2014, 5, 626–633. [Google Scholar] [CrossRef]
- Proctor, M.F.; Paetkau, D.; McLellan, B.N.; Stenhouse, G.B.; Kendall, K.C.; Mace, R.D.; Kasworm, W.F.; Servheen, C.; Lausen, C.L.; Gibeau, M.L.; et al. Population fragmentation and inter-ecosystem movements of grizzly bears in Western Canada and the northern United States. Wildl. Monogr. 2012, 1–46. [Google Scholar] [CrossRef]
- Moraes, A.M.; Ruiz-Miranda, C.R.; Galetti, P.M.; Niebuhr, B.B.; Alexandre, B.R.; Muylaert, R.L.; Grativol, A.D.; Ribeiro, J.W.; Ferreira, A.N.; Ribeiro, M.C. Landscape resistance influences effective dispersal of endangered golden lion tamarins within the Atlantic Forest. Biol. Conserv. 2018, 224, 178–187. [Google Scholar] [CrossRef] [Green Version]
- Boulanger, J.; Cattet, M.; Nielsen, S.E.; Stenhouse, G.; Cranston, J. Use of multi-state models to explore relationships between changes in body condition, habitat and survival of grizzly bears Ursus Arctos horribilis. Wildl. Biol. 2013, 19, 274–288. [Google Scholar] [CrossRef] [Green Version]
- Graham, K.; Boulanger, J.; Duval, J.; Stenhouse, G. Spatial and temporal use of roads by grizzly bears in west-central Alberta. Ursus 2010, 21, 43–56. [Google Scholar] [CrossRef]
- Roever, C.L.; Boyce, M.S.; Stenhouse, G.B. Grizzly bears and forestry. I: Road vegetation and placement as an attractant to grizzly bears. For. Ecol. Manage. 2008, 256, 1253–1261. [Google Scholar] [CrossRef]
- Mace, R.D.; Waller, J.S.; Manley, T.L.; Lyon, J.L.; Zuuring, H. Relationships among grizzly bears, roads and habitat in the Swan Mountains, Montana. J. Appl. Ecol. 1996, 33, 1395–1404. [Google Scholar] [CrossRef]
- Benn, B.; Herrero, S. Grizzly bear mortality and human access in Banff and Yoho National Parks, 1971–98. Ursus 2002, 13, 213–221. [Google Scholar]
- Nielsen, S.E.; Herrero, S.; Boyce, M.S.; Mace, R.D.; Benn, B.; Gibeau, M.L.; Jevons, S. Modelling the spatial distribution of human-caused grizzly bear mortalities in the Central Rockies ecosystem of Canada. Biol. Conserv. 2004, 120, 101–113. [Google Scholar] [CrossRef]
- Nielsen, S.E.; Stenhouse, G.B.; Boyce, M.S. A habitat-based framework for grizzly bear conservation in Alberta. Biol. Conserv. 2006, 130, 217–229. [Google Scholar] [CrossRef]
- Gibeau, M.L.; Herrero, S. Roads, rails and grizzly bears in the Bow River Valley, Alberta. In Proceedings of the State of Florida DOT Symposium, Fort Myers, FL, USA, 9–12 February 1998. [Google Scholar]
- Northrup, J.M.; Pitt, J.; Muhly, T.B.; Stenhouse, G.B.; Musiani, M.; Boyce, M.S. Vehicle traffic shapes grizzly bear behaviour on a multiple-use landscape. J. Appl. Ecol. 2012, 49, 1159–1167. [Google Scholar] [CrossRef] [Green Version]
- Hertel, A.G.; Swenson, J.E.; Bischof, R. A case for considering individual variation in diel activity patterns. Behav. Ecol. 2017, 28, 1524–1531. [Google Scholar] [CrossRef]
- Kite, R.; Nelson, T.; Stenhouse, G.; Darimont, C. A movement-driven approach to quantifying grizzly bear (Ursus arctos) near-road movement patterns in west-central Alberta, Canada. Biol. Conserv. 2016, 195, 24–32. [Google Scholar] [CrossRef]
- Scrafford, M.A.; Avgar, T.; Heeres, R.; Boyce, M.S. Roads elicit negative movement and habitat-selection responses by wolverines (Gulo gulo luscus). Behav. Ecol. 2018, 29, 534–542. [Google Scholar] [CrossRef]
- Kearney, S.P.; Coops, N.C.; Sethi, S.; Stenhouse, G.B. Maintaining accurate, current, rural road network data: An extraction and updating routine using RapidEye, participatory GIS and deep learning. Int. J. Appl. Earth Obs. Geoinf. 2020, 87, 102031. [Google Scholar] [CrossRef]
- Wang, W.; Yang, N.; Zhang, Y.; Wang, F.; Cao, T.; Eklund, P. A review of road extraction from remote sensing images. J. Traffic Transp. Eng. Engl. Ed. 2016, 3, 271–282. [Google Scholar] [CrossRef] [Green Version]
- Yan, Y.; Kuo, C.L.; Feng, C.C.; Huang, W.; Fan, H.; Zipf, A. Coupling maximum entropy modeling with geotagged social media data to determine the geographic distribution of tourists. Int. J. Geogr. Inf. Sci. 2018, 32, 1699–1736. [Google Scholar] [CrossRef]
- Wu, X.; Wood, S.A. Photos, tweets, and trails: Are social media proxies for urban trail use? J. Transp. Land Use 2017, 10, 789–804. [Google Scholar] [CrossRef] [Green Version]
- Mancini, F.; Coghill, G.M.; Lusseau, D. Using social media to quantify spatial and temporal dynamics of nature-based recreational activities. PLoS ONE 2018, 13, e0200565. [Google Scholar] [CrossRef] [Green Version]
- Tenkanen, H.; Di Minin, E.; Heikinheimo, V.; Hausmann, A.; Herbst, M.; Kajala, L.; Toivonen, T. Instagram, Flickr, or Twitter: Assessing the usability of social media data for visitor monitoring in protected areas. Sci. Rep. 2017, 7, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Wood, S.A.; Guerry, A.D.; Silver, J.M.; Lacayo, M. Using social media to quantify nature-based tourism and recreation. Sci. Rep. 2013, 3, 1–7. [Google Scholar] [CrossRef]
- Vich, G.; Marquet, O.; Miralles-Guasch, C. Suburban commuting and activity spaces: Using smartphone tracking data to understand the spatial extent of travel behaviour. Geogr. J. 2017, 183, 426–439. [Google Scholar] [CrossRef]
- Forslöf, L.; Jones, H. Roadroid: Continuous road condition monitoring with smart phones. J. Civ. Eng. Archit. 2015, 9, 485–496. [Google Scholar] [CrossRef] [Green Version]
- Cadamuro, G.; Muhebwa, A.; Taneja, J. Assigning a grade: Accurate measurement of road quality using satellite imagery. ArXiv 2018, arXiv:abs/1812.01699. [Google Scholar]
- Najjar, A.; Kaneko, S.; Miyanaga, Y. Combining satellite imagery and open data to map road safety. In Proceedings of the 31st AAAI Conference on Artificial Intelligence, AAAI, San Francisco, CA, USA, 4–9 February 2017; pp. 4524–4530. [Google Scholar]
- Roever, C.L.; Boyce, M.S.; Stenhouse, G.B. Grizzly bears and forestry. II: Grizzly bear habitat selection and conflicts with road placement. For. Ecol. Manag. 2008, 256, 1262–1269. [Google Scholar] [CrossRef]
- Achuff, P.L. Natural Regions, Subregions and Natural History Themes of Alberta: A Classification for Protected Areas Management—Updated and Revised; Alberta Environmental Protection, Parks Services: Edmonton, Alberta, 1994. [Google Scholar]
- ABMI. ABMI Human Footprint Inventory: Wall-to-Wall Human Footprint Inventory; ABMI: Edmonton, AB, Canada, 2016. [Google Scholar]
- Hermosilla, T.; Wulder, M.A.; White, J.C.; Coops, N.C.; Hobart, G.W. Regional detection, characterization, and attribution of annual forest change from 1984 to 2012 using Landsat-derived time-series metrics. Remote Sens. Environ. 2015, 170, 121–132. [Google Scholar] [CrossRef]
- McRae, B.H.; Dickson, B.G.; Keitt, T.H.; Shah, V.B. Using circuit theory to model connectivity in ecology, evolution, and conservation. Ecology 2008, 89, 2712–2724. [Google Scholar] [CrossRef] [PubMed]
- McRae, B.H.; Shah, V.B.; Mohapatra, T.K. Circuitscape 4 User Guide. The Nature Conservancy. 2013. Available online: http://www.circuitscape.org (accessed on 1 October 2019).
- Bezanson, J.; Edelman, A.; Karpinski, S.; Shah, V.B. Julia: A fresh approach to numerical computing. SIAM Rev. 2017, 59, 65–98. [Google Scholar] [CrossRef] [Green Version]
- Anantharaman, R.; Hall, K.; Shah, V.; Edelman, A. Circuitscape in Julia: High Performance Connectivity Modelling to Support Conservation Decisions. ArXiv 2019, arXiv:1906.03542. [Google Scholar]
- Tyc, G.; Tulip, J.; Schulten, D.; Krischke, M.; Oxfort, M. The RapidEye mission design. Acta Astronaut. 2005, 56, 213–219. [Google Scholar] [CrossRef]
- Hunt, E.R.; Doraiswamy, P.C.; McMurtrey, J.E.; Daughtry, C.S.T.; Perry, E.M.; Akhmedov, B. A visible band index for remote sensing leaf chlorophyll content at the Canopy scale. Int. J. Appl. Earth Obs. Geoinf. 2012, 21, 103–112. [Google Scholar] [CrossRef] [Green Version]
- Abdollahnejad, A.; Panagiotidis, D.; Surový, P. Forest canopy density assessment using different approaches—Review. J. For. Sci. 2017, 63, 107–116. [Google Scholar] [CrossRef]
- Ruiz, L.A.; Recio, J.A.; Fernández-Sarría, A.; Hermosilla, T. A feature extraction software tool for agricultural object-based image analysis. Comput. Electron. Agric. 2011, 76, 284–296. [Google Scholar] [CrossRef] [Green Version]
- Goodbody, T.R.H.; Coops, N.C.; Hermosilla, T.; Tompalski, P.; McCartney, G.; MacLean, D.A. Digital aerial photogrammetry for assessing cumulative spruce budworm defoliation and enhancing forest inventories at a landscape-level. ISPRS J. Photogramm. Remote Sens. 2018, 142, 1–11. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; Hermosilla, T.; Tompalski, P.; Crawford, P. Assessing the status of forest regeneration using digital aerial photogrammetry and unmanned aerial systems. Int. J. Remote Sens. 2018, 39, 5246–5264. [Google Scholar] [CrossRef]
- Kuhn, M.; Wing, J.; Weston, S.; Williams, A.; Keefer, C.; Engelhardt, A.; Cooper, T.; Mayer, Z.; Kenkel, B.; R Core Team; et al. Caret: Classification and Regression Training 2020. R Package Version 6.0-86. Available online: https://rdrr.io/cran/caret/ (accessed on 28 June 2021).
- Strobl, C.; Boulesteix, A.L.; Zeileis, A.; Hothorn, T. Bias in random forest variable importance measures: Illustrations, sources and a solution. BMC Bioinform. 2007, 8. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Van den Berg, R.A.; Hoefsloot, H.C.J.; Westerhuis, J.A.; Smilde, A.K.; van der Werf, M.J. Centering, scaling, and transformations: Improving the biological information content of metabolomics data. BMC Genom. 2006, 7, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Cattet, M.; Boulanger, J.; Stenhouse, G.; Powell, R.A.; Reynolds-Hogland, M.J. An evaluation of long-term capture effects in ursids: Implications for wildlife welfare and research. J. Mammal. 2008, 89, 973–990. [Google Scholar] [CrossRef]
- Signer, J.; Fieberg, J.; Avgar, T. Animal movement tools (amt): R package for managing tracking data and conducting habitat selection analyses. Ecol. Evol. 2019, 9, 880–890. [Google Scholar] [CrossRef] [PubMed]
- Graham, K.; Stenhouse, G.B. Home range, movements and denning chronology of the grizzly bear (Ursus arctos) in west-central Alberta. Can. Field Nat. 2014, 128, 223–234. [Google Scholar] [CrossRef] [Green Version]
- Munro, R.H.M.; Nielsen, S.E.; Price, M.H.; Stenhouse, G.B.; Boyce, M.S. Seasonal and diel patterns of grizzly bear diet and activity in west-central Alberta. J. Mammal. 2006, 87, 1112–1121. [Google Scholar] [CrossRef]
- Bates, D.; Mächler, M.; Bolker, B.; Walker, S. Fitting linear mixed-effects models using lme4. J. Stat. Softw. 2015, 1. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; Version 3.6.0.; R Foundation for Statistical Computing: Vienna, Austria, 2019; Available online: https://www.R-project.org/ (accessed on 28 June 2021).
- Gillies, C.S.; Hebblewhite, M.; Nielsen, S.E.; Krawchuk, M.A.; Aldridge, C.L.; Frair, J.L.; Saher, D.J.; Stevens, C.E.; Jerde, C.L. Application of random effects to the study of resource selection by animals. J. Anim. Ecol. 2006, 75, 887–898. [Google Scholar] [CrossRef]
- Burnham, K.P.; Anderson, D.R. Model Selection and Multi-Model Inference: A Practical Information-Theoretic Approach, 2nd ed.; Springer Science & Business Media: New York, NY, USA, 2002; ISBN 978-0-387-22456-5. [Google Scholar]
- Hausmann, A.; Toivonen, T.; Slotow, R.; Tenkanen, H.; Moilanen, A.; Heikinheimo, V.; Di Minin, E. Social media data can be used to understand tourists’ preferences for nature-based experiences in protected areas. Conserv. Lett. 2018, 11, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Hausmann, A.; Toivonen, T.; Heikinheimo, V.; Tenkanen, H.; Slotow, R.; Di Minin, E. Social media reveal that charismatic species are not the main attractor of ecotourists to sub-Saharan protected areas. Sci. Rep. 2017, 7, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Lamb, C.T.; Ford, A.T.; McLellan, B.N.; Proctor, M.F.; Mowat, G.; Ciarniello, L.; Nielsen, S.E.; Boutin, S. The ecology of human-carnivore coexistence. Proc. Natl. Acad. Sci. USA 2020, 117, 17876–17883. [Google Scholar] [CrossRef] [PubMed]
- Jacobson, S.L.; Bliss-Ketchum, L.L.; De Rivera, C.E.; Smith, W.P. A behavior-based framework for assessing barrier effects to wildlife from vehicle traffic volume. Ecosphere 2016, 7, 1–15. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description | Formula |
|---|---|---|
| Vegetation indices | ||
| NDVI | Normalized Difference Vegetation Index | |
| NGRDI | Normalized Green-Red Difference Index | |
| RECI | Red-Edge Chlorophyll Index | |
| RENDVI | Red-Edge Normalized Difference Vegetation Index | |
| RG-ratio | Red/Green Ratio | |
| SUM | Sum of visible bands | |
| BARESOIL | Bare Soil Index | |
| Terrain variables | ||
| DEM | Elevation (m) | |
| INSOL | Insolation | |
| SLOPE | Slope (degrees) | |
| TWI | Topographic Wetness Index | * |
| Roughness | Speed | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Observed | User’s Accuracy | Observed | User’s Accuracy | ||||||
| Predicted | Low | Med | High | Predicted | Low | Med | High | ||
| Low | 127.7 | 57.7 | 15.9 | 63% | Low | 23.3 | 23.0 | 5.0 | 45% |
| Med | 108.7 | 286.1 | 135.4 | 54% | Med | 89.5 | 389.6 | 118.2 | 65% |
| High | 8.6 | 38.3 | 38.2 | 45% | High | 0.0 | 44.4 | 122.9 | 73% |
| Producer’s Accuracy | 52% | 75% | 71% | 55% | Producer’s Accuracy | 21% | 85% | 48% | 66% |
| Network- Based | Reference | Image-Based | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Low | Med | High | Total | Agreement | Low | Med | High | Total | Agreement | |
| Low | 4436 | 1849 | 10 | 6295 | 70% | 4189 | 1710 | 396 | 6295 | 67% |
| Med | 2582 | 2645 | 321 | 5548 | 48% | 2687 | 1819 | 1043 | 5548 | 33% |
| High | 387 | 1079 | 507 | 1973 | 55% | 494 | 603 | 876 | 1973 | 31% |
| Total | 7405 | 5573 | 838 | 13,816 | 7370 | 4132 | 2314 | 13,816 | ||
| Agreement | 60% | 47% | 60% | 55% | 57% | 44% | 38% | 50% | ||
| Image- Based | ||||||||||
| Low | 4934 | 2391 | 45 | 7370 | 67% | |||||
| Med | 1989 | 1960 | 182 | 4132 | 47% | |||||
| High | 482 | 1221 | 611 | 2314 | 53% | |||||
| Total | 7405 | 5573 | 838 | 13,816 | ||||||
| Agreement | 67% | 35% | 73% | 54% | ||||||
| Time of Day | Scale | Model | AIC | ΔAIC | AICw |
|---|---|---|---|---|---|
| Night | 200 m | Network-based | 521,640.7 | 142.0 | 0.00 |
| Image-based | 521,704.5 | 78.2 | 0.00 | ||
| Reference | 521,562.5 | 0.0 | 1.00 | ||
| 2000 m | Network-based | 514,291.2 | 1636.5 | 0.00 | |
| Image-based | 514,291.2 | 1190.8 | 0.00 | ||
| Reference | 514,291.2 | 0.0 | 1.00 | ||
| Day | 200 m | Network-based | 1,135,300 | 116.9 | 0.00 |
| Image-based | 1,135,165 | 252.2 | 0.00 | ||
| Reference | 1,135,048 | 0.0 | 1.00 | ||
| 2000 m | Network-based | 1,123,326 | 984.5 | 0.00 | |
| Image-based | 1,123,326 | 1610.4 | 0.00 | ||
| Reference | 1,123,326 | 0.0 | 1.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kearney, S.P.; Larsen, T.A.; Goodbody, T.R.H.; Coops, N.C.; Stenhouse, G.B. Characterizing Off-Highway Road Use with Remote-Sensing, Social Media and Crowd-Sourced Data: An Application to Grizzly Bear (Ursus Arctos) Habitat. Remote Sens. 2021, 13, 2547. https://doi.org/10.3390/rs13132547
Kearney SP, Larsen TA, Goodbody TRH, Coops NC, Stenhouse GB. Characterizing Off-Highway Road Use with Remote-Sensing, Social Media and Crowd-Sourced Data: An Application to Grizzly Bear (Ursus Arctos) Habitat. Remote Sensing. 2021; 13(13):2547. https://doi.org/10.3390/rs13132547
Chicago/Turabian StyleKearney, Sean P., Terrence A. Larsen, Tristan R. H. Goodbody, Nicholas C. Coops, and Gordon B. Stenhouse. 2021. "Characterizing Off-Highway Road Use with Remote-Sensing, Social Media and Crowd-Sourced Data: An Application to Grizzly Bear (Ursus Arctos) Habitat" Remote Sensing 13, no. 13: 2547. https://doi.org/10.3390/rs13132547