
3D Imaging Algorithm of Directional Borehole Radar Based on Root-MUSIC


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
2.1.1. Two-Dimensional Model
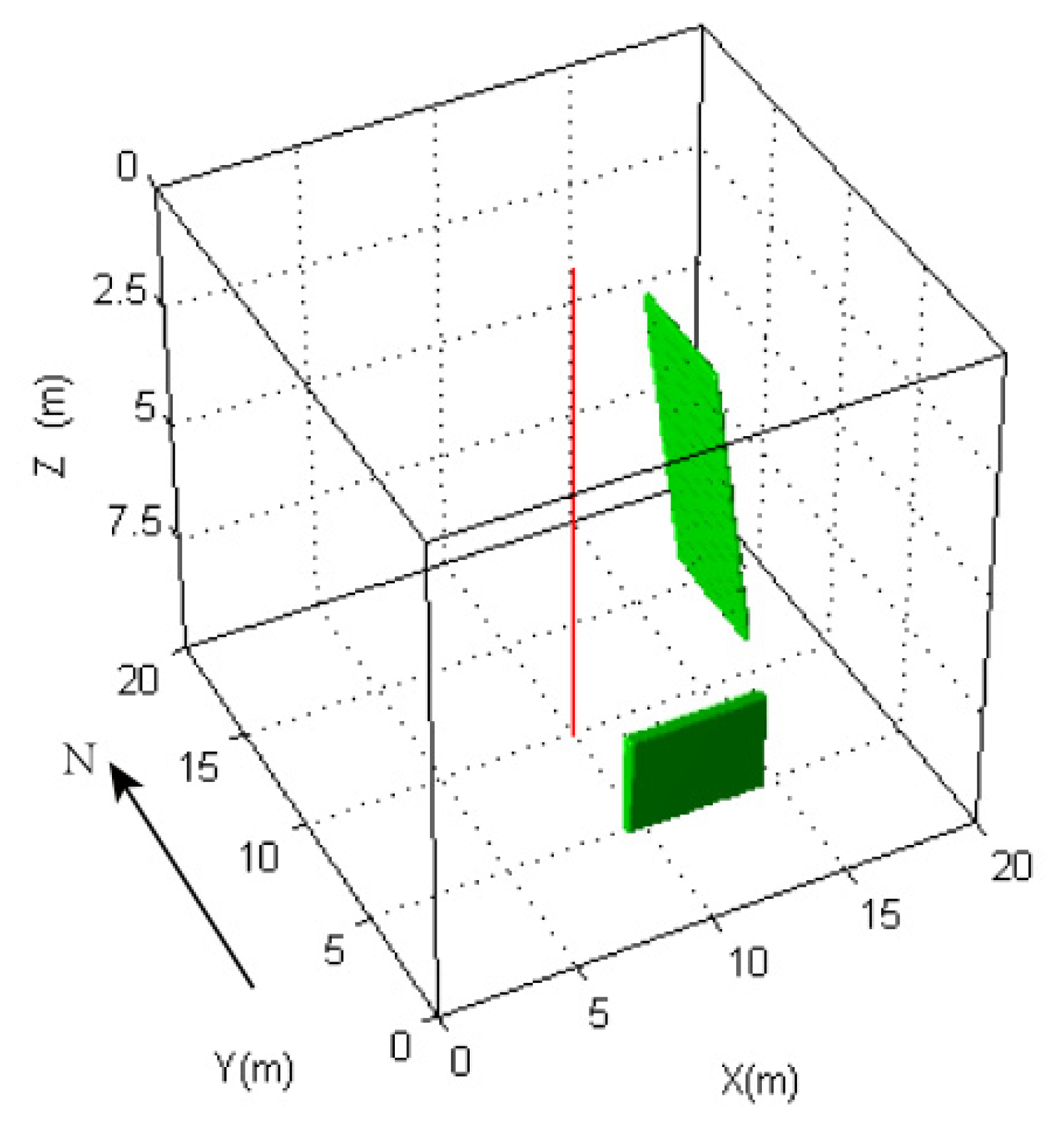
2.1.2. Three-Dimensional Model
2.2. Methods
2.2.1. Numerical Simulation Algorithm
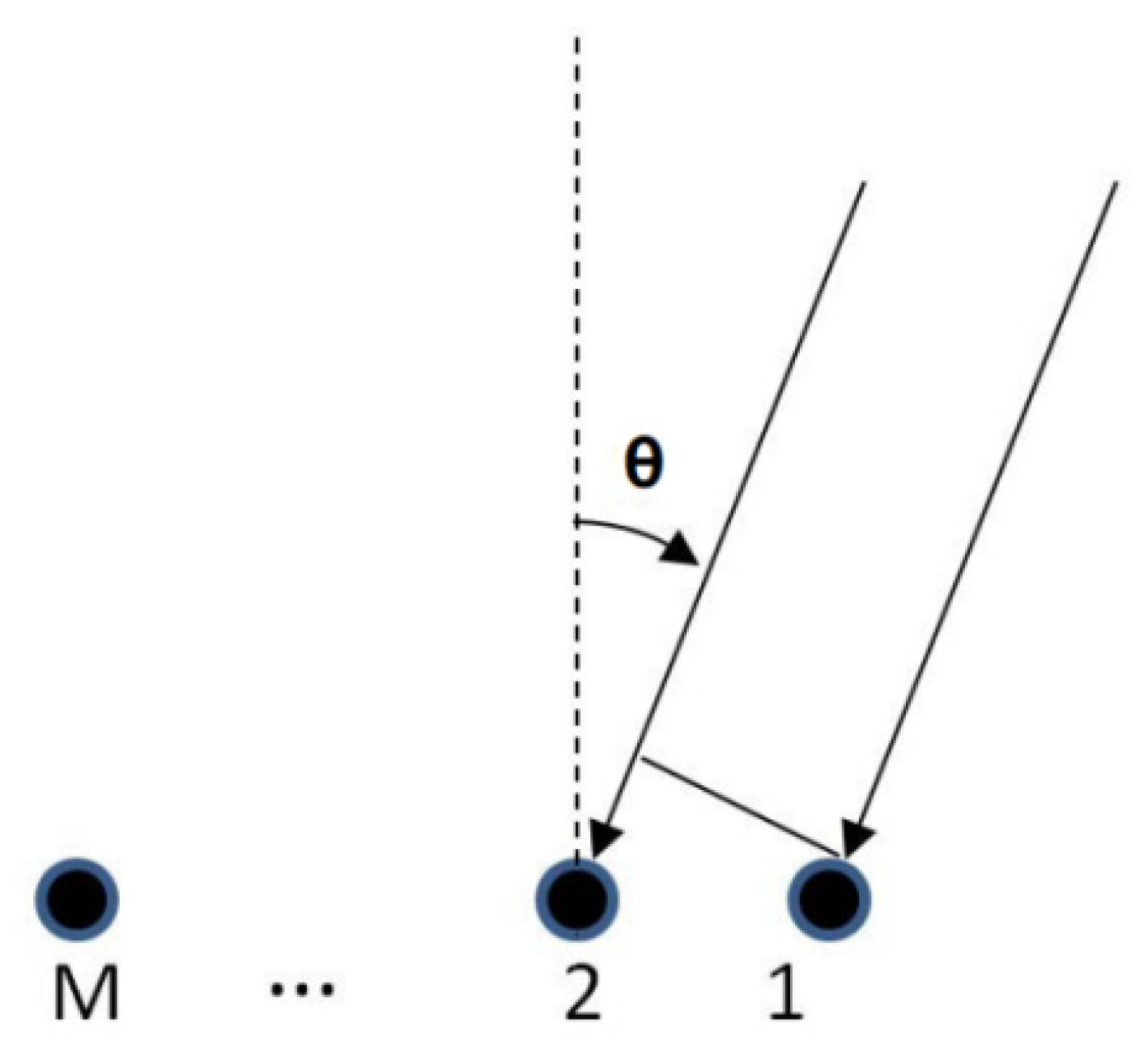
2.2.2. General Theory of Uniform Linear Array
- (1)
- The number of sources cannot be greater than the number of receiving antennas;
- (2)
- The noise is uniform random noise, and the signal is not correlated with the noise;
- (3)
- The signal sources are usually narrow-band far-field signals;
- (4)
2.2.3. Root-MUSIC Algorithm
- (1)
- The array element spacing is not less than half of the wavelength of the highest frequency signal;
- (2)
- The noise of the processor is additive Gaussian distribution;
- (3)
- The number of signal sources is less than the number of array elements, and the number of signal samples is greater than the number of array elements;
- (4)
- The source must be a random number with uniform distribution.
- (1)
- The covariance matrix is calculated according to the received data ;
- (2)
- The covariance matrix is eigen-decomposed to determine the noise subspace and the signal subspace ;
- (3)
- According to Equation (12), the root polynomial is constructed and the roots of the polynomial are found;
- (4)
- The roots near the unit circle are found, and the signal DOA is solved according to Equation (14).
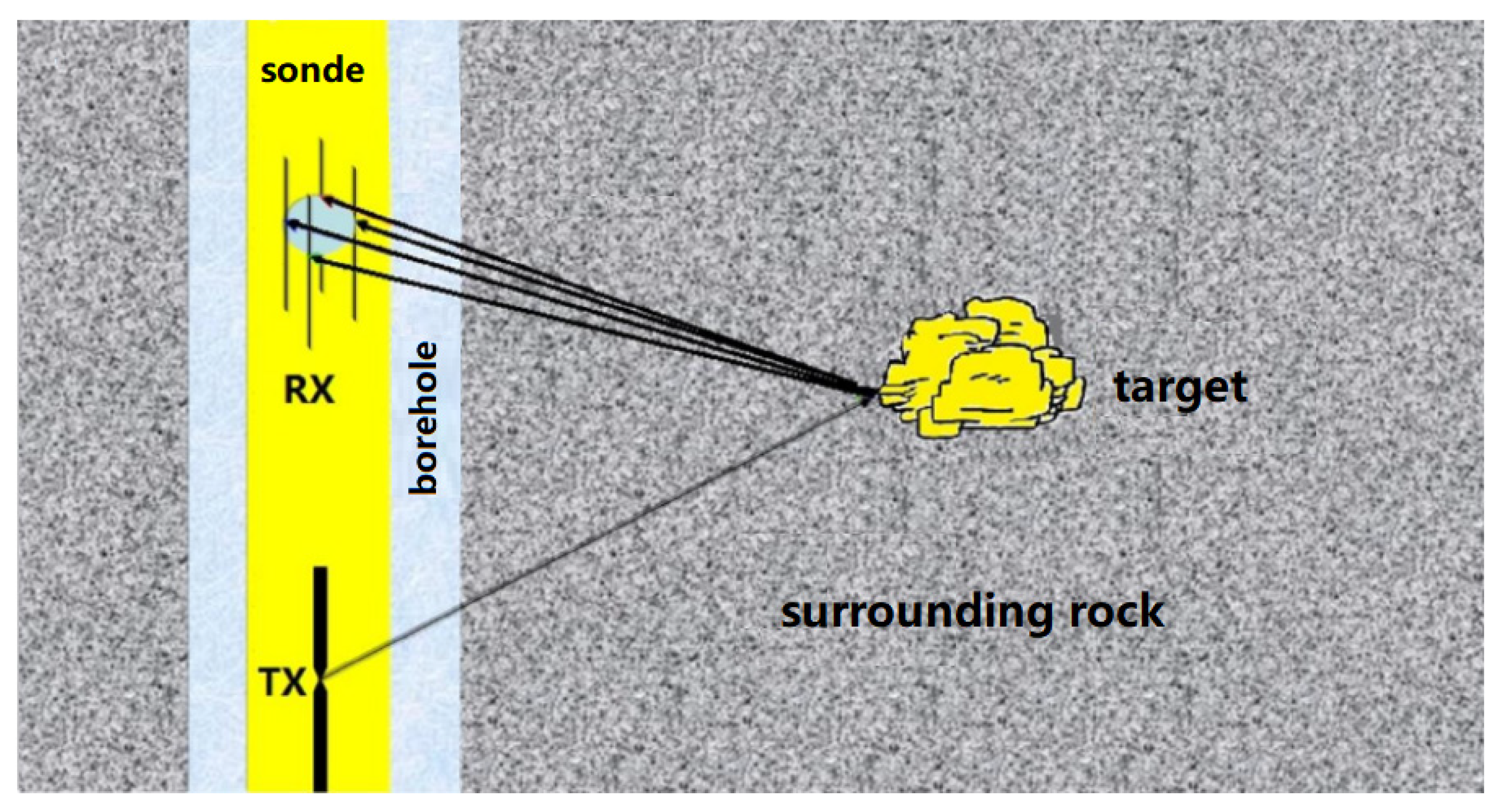
2.2.4. 3D Imaging Algorithm of Directional Borehole Radar Based on Root-MUSIC
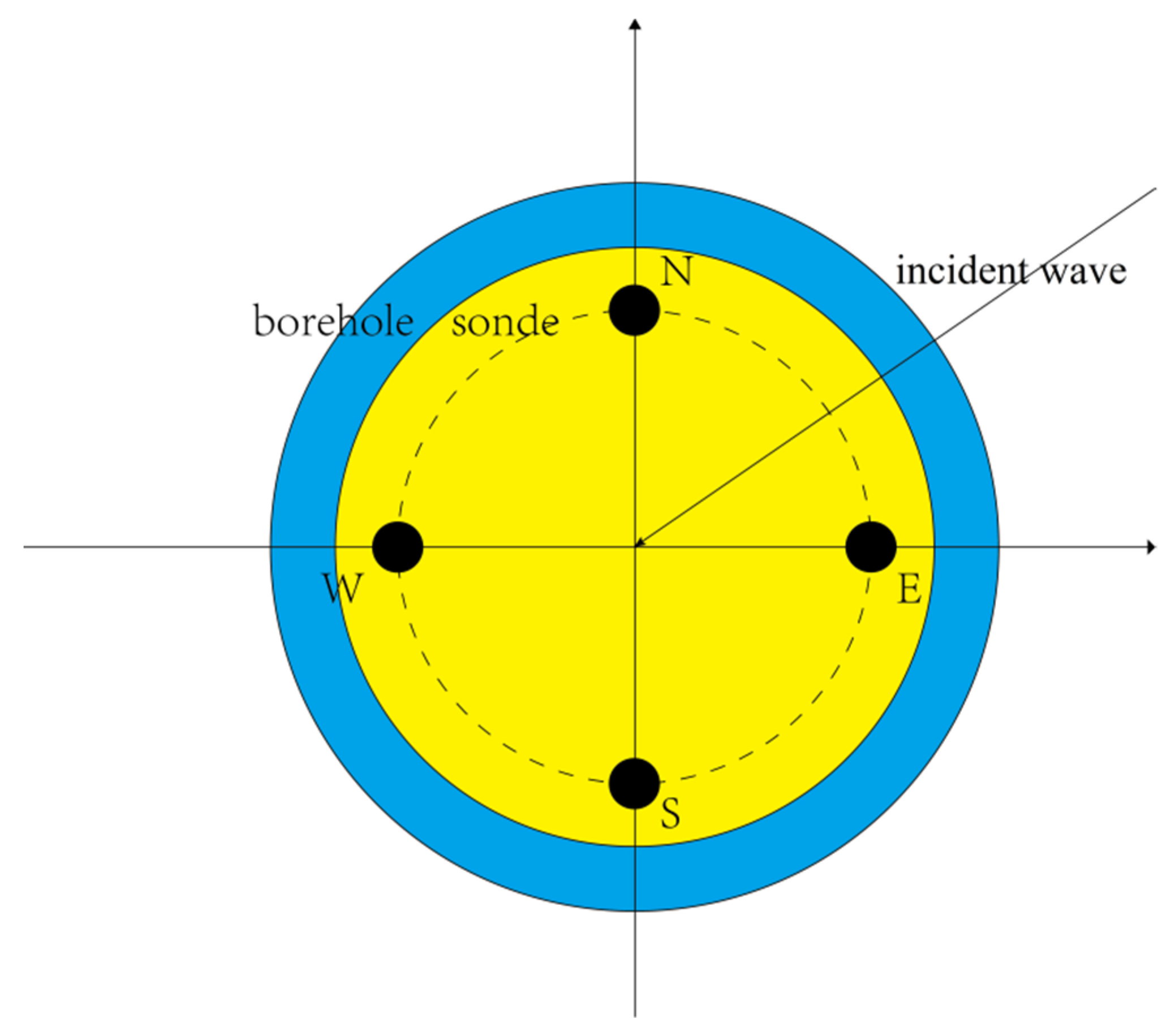
DOA Method Based on a Uniform Circular Array
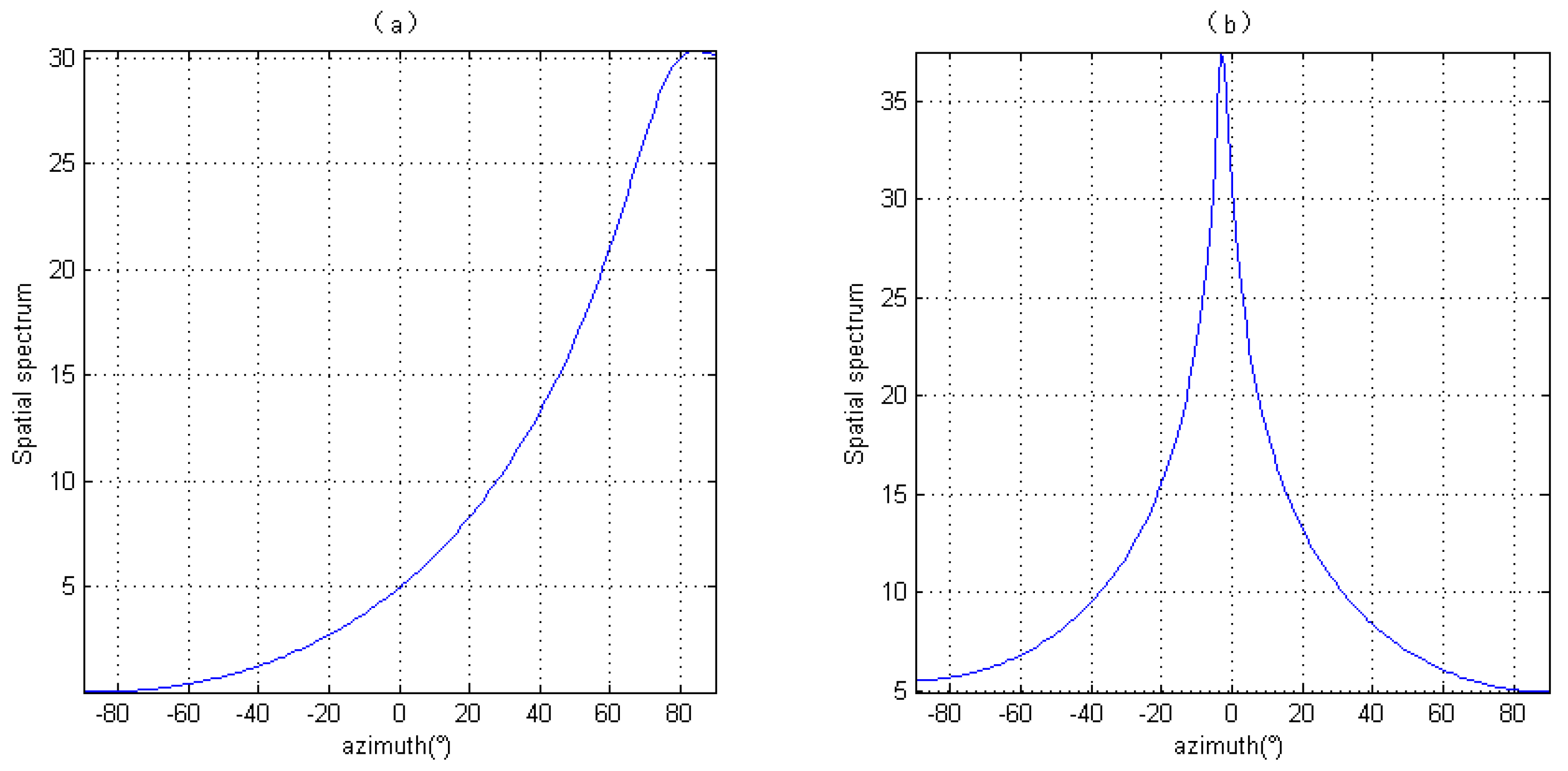
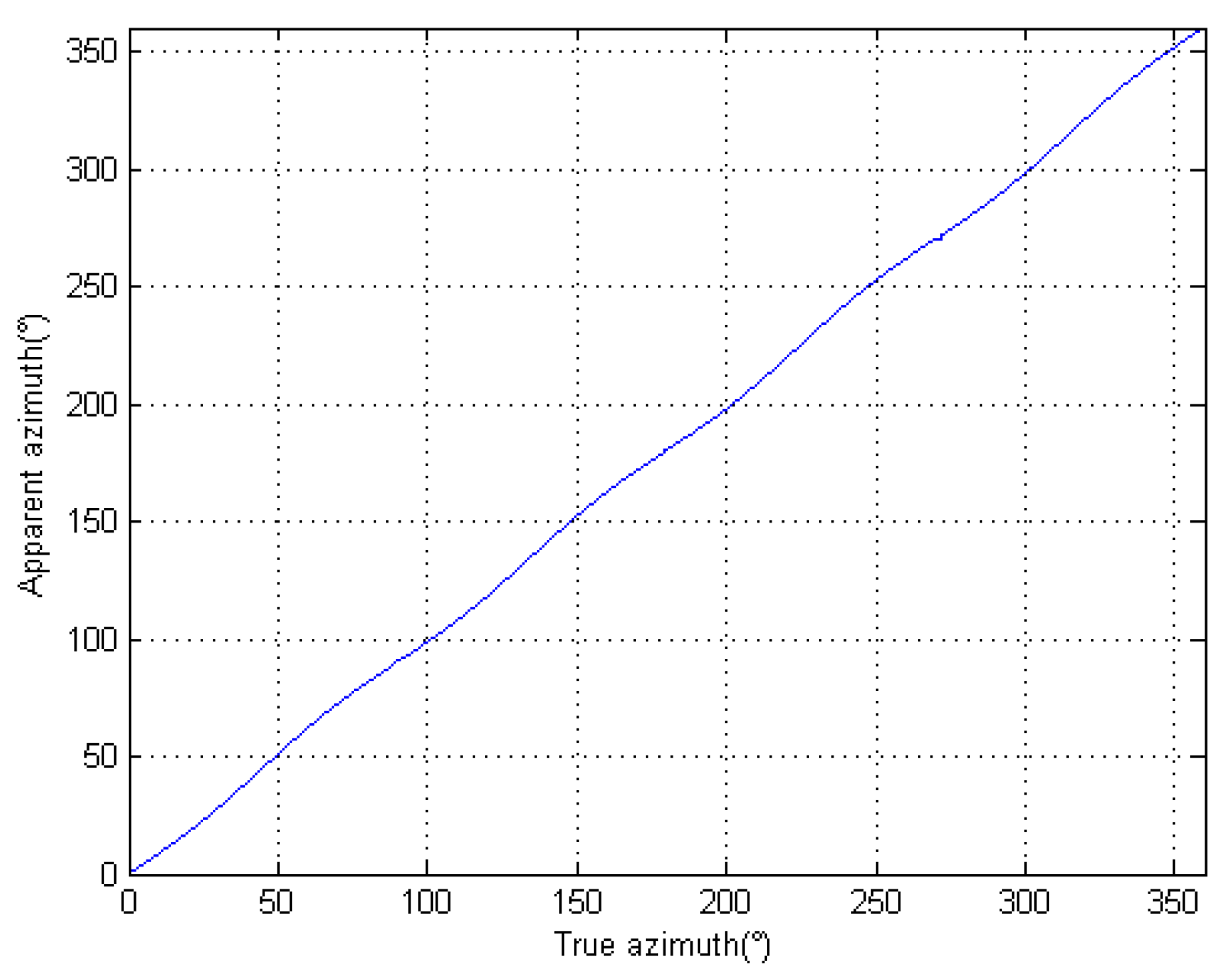
Borehole Effect and Correction
3D Imaging Algorithm
- (1)
- We input relevant parameters, including the receiving and transmitting distances, central frequency of the antenna, relative permittivity of the surrounding rock, relative permittivity of the borehole fluid, relative permittivity of the sonde, time sampling interval, channel spacing, and received signals of the four receiving antennas.
- (2)
- The original data are processed by direct wave.
- (3)
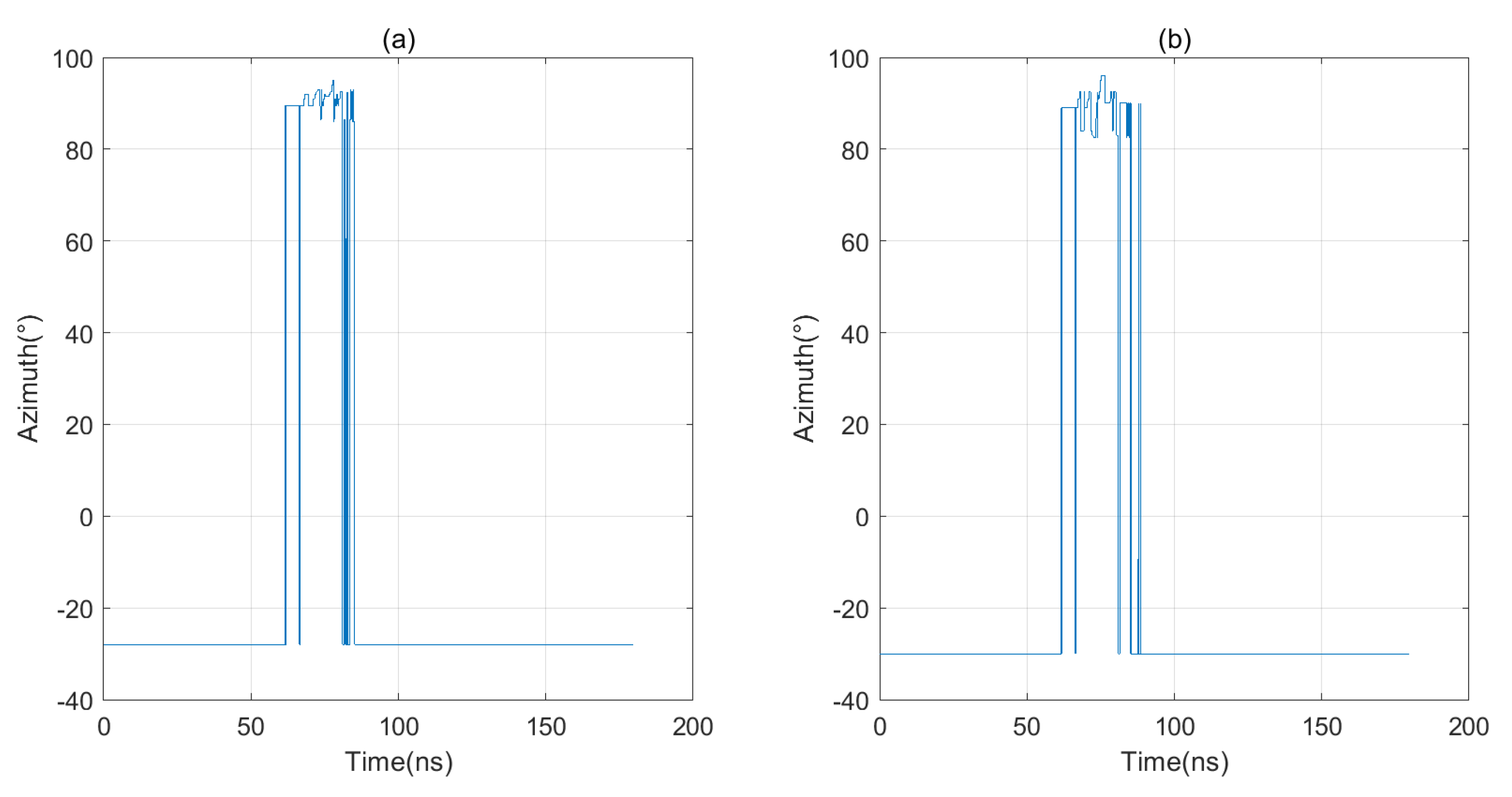
- For each depth, we choose an appropriate window to ensure that the signal of a certain direction in the window is dominant. At the same time, a threshold is selected. When the average value of the four signals in the window is lower than the threshold, the data in the window will be regarded as noise and will not be processed. If it is larger than the threshold, the apparent azimuth is calculated according to the azimuth recognition algorithm in the uniform medium. Move the window, point by point, until all points of the trace are corresponding to this depth point. The above treatment is applied to traces of all depths.
- (4)
- We filter the apparent azimuth to eliminate the burr.
- (5)
- Eliminate borehole effects by using the correspondence between the apparent azimuth and the true azimuth.
- (6)
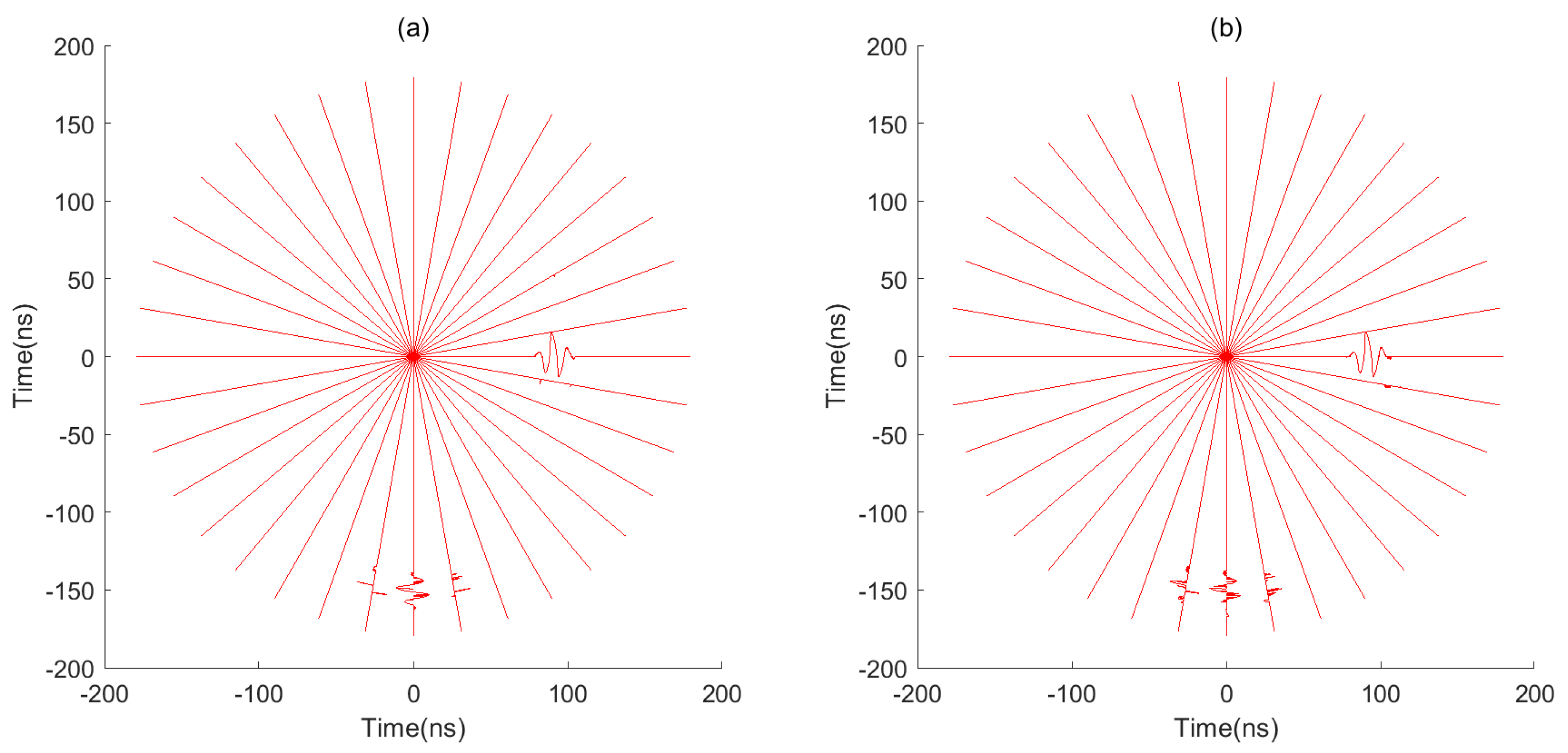
- For the data of each depth, we use the true azimuth and the original signal to calculate the transverse slice of the depth. The longitudinal slice is obtained by drawing the depth signals of each azimuth in the three-dimensional array.
- (7)
- For each longitudinal slice, migration imaging processing is performed to solve the elevation problem.
- (8)
- Vertical and horizontal slices after migration are used to construct three-dimensional arrays. The first dimension of the three-dimensional array is the number of traces; the second dimension is the azimuth from 0° to 360°. The angle interval is 10°. The third dimension is the number of sampling points. Then, we image the three-dimensional arrays.
3. Results
3.1. Calculation Results of Two-Dimensional Numerical Simulation
3.2. Calculation Results of Three-Dimensional Numerical Simulation
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Jia, Z.; Liu, S.; Zhang, L.; Hu, B.; Zhang, J. Weak Signal Extraction from Lunar Penetrating Radar Channel 1 Data Based on Local Correlation. Electronics 2019, 8, 573. [Google Scholar] [CrossRef] [Green Version]
- Bristow, C.S.; Jol, H.M. Ground Penetrating Radar in Sediments; The Geological Society Publishing House: London, UK, 2003. [Google Scholar]
- Daniels, D.J. Ground Penetrating Radar, 2nd ed.; The Institution of Electrical Engineers: London, UK, 2004. [Google Scholar]
- Jol, H.M. Ground Penetrating Radar: Theory and Applications; Elsevier Science: London, UK, 2009. [Google Scholar]
- Peters, L.; Daniels, J.J. Ground penetrating radar as a subsurface environmental sensing tool. Proc. IEEE 1994, 82, 1802–1822. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Hu, B.; Jia, Z.; Xu, Y. The Subsurface Structure on the CE-3 Landing Site: LPR CH-1 Data Processing by Shearlet Transform. Pure Appl. Geophys. 2020, 177, 3459–3474. [Google Scholar] [CrossRef]
- Sandberg, E.V.; Olsson, O.L.; Falk, L.R. Combined Interpretation of Fracture Zones in Crystalline Rock Using Single-hole, Crosshole Tomography and Directional Borehole-radar Data. Log Anal. Soc. Petrophys. Well-Log Anal. 1991, 32, 108–119. [Google Scholar]
- Liu, S.; Sato, M. Subsurface water-filled fracture detection by borehole radar: A case history. Prog. Geophys. 2004. [Google Scholar] [CrossRef]
- Olsson, O.; Falk, L.; Forslund, O.; Lundmark, L.; Sandberg, E. Borehole radar applied to the characterization of hydraulically conductive fracture zones in crystalline rock. Geophys. Prospect. 1992, 40, 109–142. [Google Scholar] [CrossRef]
- Takayama, T.; Sato, M. A Novel Direction-Finding Algorithm for Directional Borehole Radar. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2520–2528. [Google Scholar] [CrossRef]
- Jang, H.; Kuroda, S.; Kim, H.J. SVD Inversion of Zero-Offset Profiling Data Obtained in the Vadose Zone Using Cross-Borehole Radar. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3849–3855. [Google Scholar] [CrossRef]
- Liu, S.; Sato, M.; Takahashi, K. Application of borehole radar for subsurface physical measurement. J. Geophys. Eng. 2004, 1, 221–227. [Google Scholar] [CrossRef]
- van Dongen, K.W.; van Waard, R.; van der Baan, S.; van den Berg, P.M.; Fokkema, J.T. A Directional Borehole Radar System. Subsurf. Sens. Technol. Appl. 2002, 3, 327–346. [Google Scholar] [CrossRef]
- Ebihara, S.; Wada, K.; Karasawa, S.; Kawata, K. Probe rotation effects on direction of arrival estimation in array-type directional borehole radar. Near Surf. Geophys. 2017, 15, 286–297. [Google Scholar] [CrossRef]
- Liu, L. Fracture Characterization Using Borehole Radar: Numerical Modeling. Water Air Soil Pollut. Focus 2006, 6, 17–34. [Google Scholar] [CrossRef]
- Sato, M.; Tanimoto, T. A shielded loop array antenna for a directional borehole radar. In Proceedings of the Fourth International Conference on Ground Penetrating Radar, Rovaniemi, Finland, 8–13 June 1992. [Google Scholar]
- Lytle, R.J.; Laine, E.F. Design of a Miniature Directional Antenna for Geophysical Probing from Boreholes. IEEE Trans. Geosci. Electron. 1978, 16, 304–307. [Google Scholar] [CrossRef]
- Bradley, J.A.; Wright, D.L. Microprocessor-based data-acquisition system for a borehole radar. IEEE Trans. Geosci. Remote Sens. 1987, 4, 441–447. [Google Scholar] [CrossRef]
- Ebihara, S.; Kimura, Y.; Shimomura, T.; Uchimura, R.; Choshi, H. Coaxial-Fed Circular Dipole Array Antenna with Ferrite Loading for Thin Directional Borehole Radar Sonde. IEEE Trans. Geosci. Remote Sens. 2014, 53, 1842–1854. [Google Scholar] [CrossRef]
- Ebihara, S. Directional borehole radar with dipole antenna array using optical modulators. IEEE Trans. Geosci. Remote Sens. 2004, 42, 45–58. [Google Scholar] [CrossRef]
- Wright, D.L.; Watts, R.D.; Bramsoe, E. A short-pulse electromagnetic transponder for hole-to-hole use. IEEE Trans. Geosci. Remote Sens. 1984, 6, 720–725. [Google Scholar] [CrossRef]
- Ellefsen, K.J.; Wright, D.L. Radiation pattern of a borehole radar antenna. Geophysics 2005, 70, K1–K11. [Google Scholar] [CrossRef]
- Yamada, H.; Ohmiya, M. Superresolution techniques for time-domain measurements with a network analyzer. IEEE Trans. Antennas Propag. 1991, 39, 177–183. [Google Scholar] [CrossRef]
- Yee, K.S. Numerical solution of initial boundary value problems involving maxwell’s equations in isotropic media. IEEE Trans. Antennas Propag. 1966, 14, 302–307. [Google Scholar]
- Abe, T.; Sato, M. A cavity measurement by polarimetric borehole radar and a verification by FDTD. Tech. Rep. Ieice Sane 2001, 101, 57–64. [Google Scholar]
- Zivanovic, S.S.; Yee, K.S. A subgridding method for the time-domain finite-difference method to solve Maxwell’s equations. IEEE Trans. Microw. Theory Tech. 1991, 39, 471–479. [Google Scholar] [CrossRef]
- Chevalier, M.W.; Luebbers, R.J.; Cable, V.P. FDTD local grid with material traverse. IEEE Trans. Antennas Propag. 1997, 45, 411–421. [Google Scholar] [CrossRef]
- Sun, S.H.; Choi, C. A new subgridding scheme for two-dimensional FDTD and FDTD (2,4) methods. IEEE Trans. Magn. 2004, 40, 1041–1044. [Google Scholar] [CrossRef]
- Monk, P. Sub-gridding FDTD schemes. Appl. Comput. Electromagn. Soc. J. 1996, 11, 37–46. [Google Scholar]
- Chen, J.; Zhang, A. A Subgridding Scheme Based on the FDTD Method and HIE-FDTD Method. Appl. Comput. Electromagn. Soc. J. 2011, 26, 1. [Google Scholar]
- Huang, Y.J.; Wang, Y.W.; Meng, F.J.; Wang, G.L. A spatial spectrum estimation algorithm based on adaptive beamforming nulling. In Proceedings of the 2013 Fourth International Conference on Intelligent Control and Information Processing (ICICIP), Beijing, China, 9–11 June 2013. [Google Scholar]
- Schmidt, R.; Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Krim, B.H.; Viberg, M. Two decades of array signal processing research. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Ebihara, S.; Sato, M.; Niitsuma, H. Super-resolution of coherent targets by a directional borehole radar. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1725–1732. [Google Scholar] [CrossRef]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Liu, S.; Shen, X.; Zheng, W. 3D Imaging Algorithm of Directional Borehole Radar Based on Root-MUSIC. Remote Sens. 2021, 13, 2957. https://doi.org/10.3390/rs13152957
Wang W, Liu S, Shen X, Zheng W. 3D Imaging Algorithm of Directional Borehole Radar Based on Root-MUSIC. Remote Sensing. 2021; 13(15):2957. https://doi.org/10.3390/rs13152957
Chicago/Turabian StyleWang, Wentian, Sixin Liu, Xuzhang Shen, and Wenjun Zheng. 2021. "3D Imaging Algorithm of Directional Borehole Radar Based on Root-MUSIC" Remote Sensing 13, no. 15: 2957. https://doi.org/10.3390/rs13152957
APA StyleWang, W., Liu, S., Shen, X., & Zheng, W. (2021). 3D Imaging Algorithm of Directional Borehole Radar Based on Root-MUSIC. Remote Sensing, 13(15), 2957. https://doi.org/10.3390/rs13152957