
PUMA Applied to Time Delay Estimation for Processing GPR Data over Debonded Pavement Structures


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
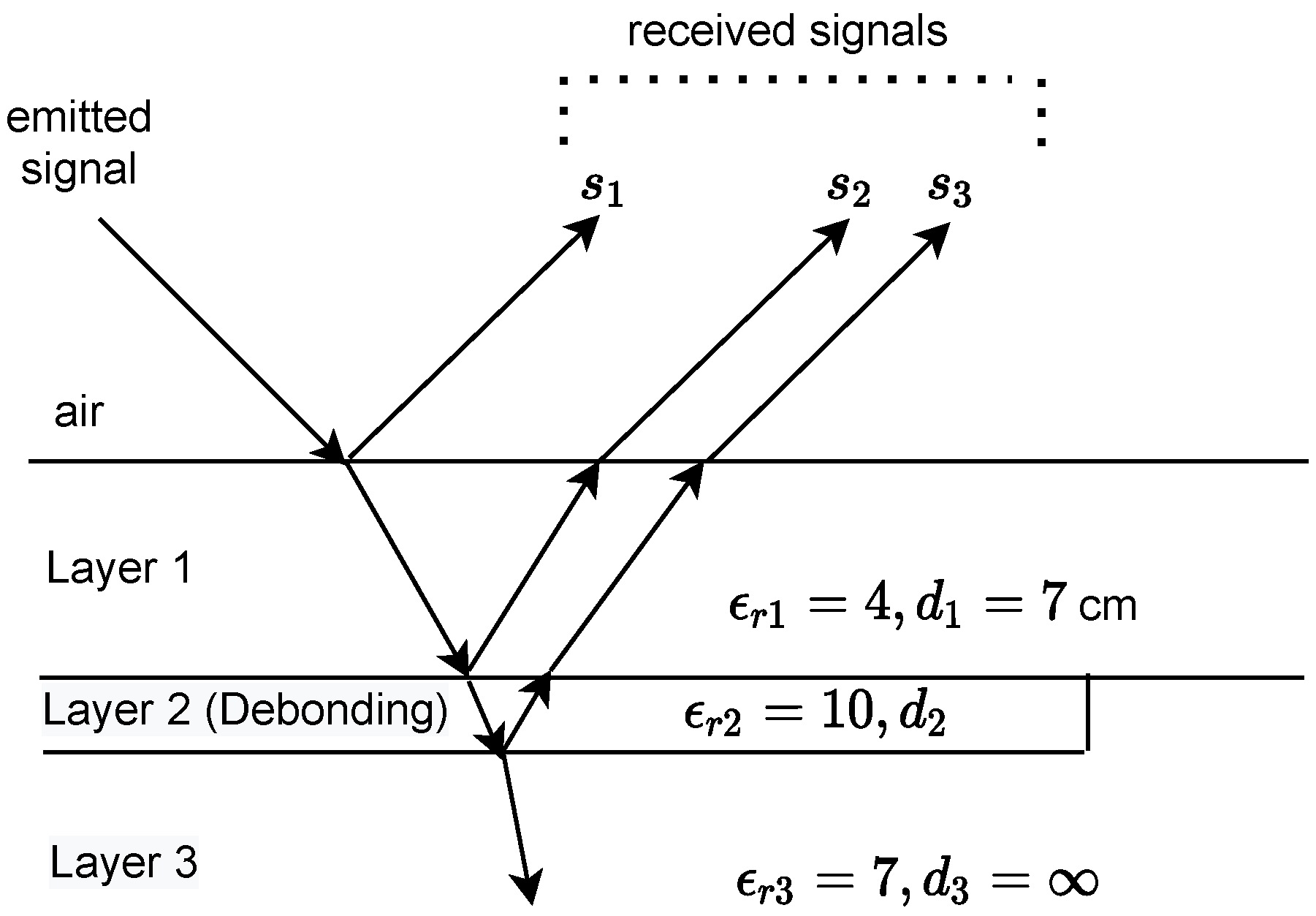
2. Data Model
- The road pavement is a stratified medium consisting of K smooth and homogeneous layers with low permittivity and negligible electrical conductivity;
- The impinging EM waves on the road pavement are assumed to be plane waves emitted from an antenna in the far field;
- Each layer contributes only one echo to the data model (single scattering assumption).
- : frequency data vector;
- : diagonal matrix whose elements are the Fourier transforms of the emitted pulse;
- : mode matrix;
- : steering vector of size ;
- : source vector containing the amplitudes of the echoes;
- : noise vector with zero mean and covariance matrix ;
- : the frequency samples where is the beginning of the bandwidth, is the frequency difference between two adjacent samples, and .
3. Time Delay Estimation Algorithms
3.1. Eigendecomposition
3.2. Root-MUSIC
3.3. PUMA for TDE
4. Simulated Data
4.1. Parameters for the Pavement Survey
4.2. Correlation Scenarios
4.2.1. Scenario 1: Uncorrelated Echoes
4.2.2. Scenario 2: Full Correlation between Overlapping Echoes
4.2.3. Scenario 3: Full Correlation between Echoes
4.3. Computed Data Covariance Matrix
5. Results
5.1. Evaluation Criteria
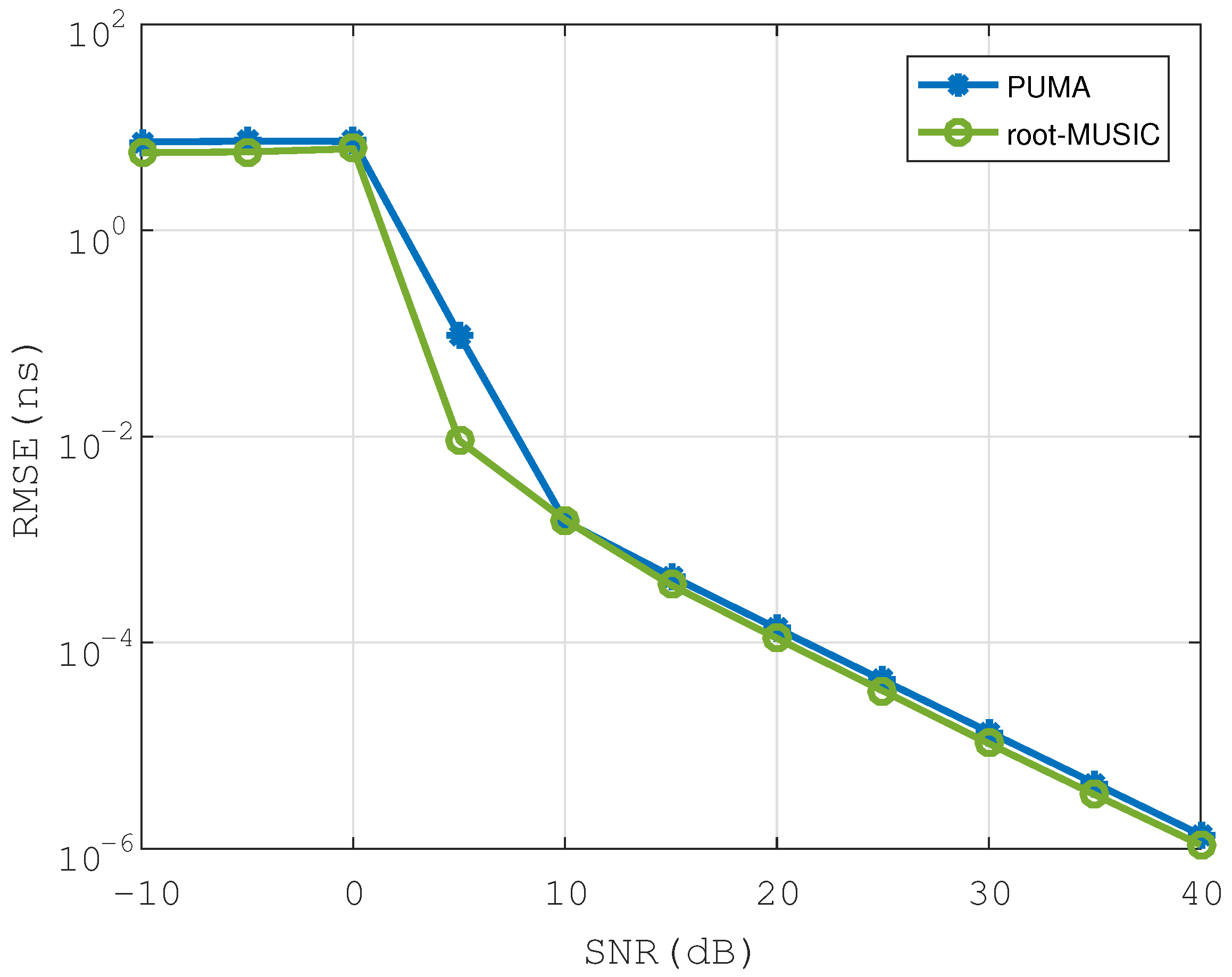
5.2. Scenario 1: Uncorrelated Echoes
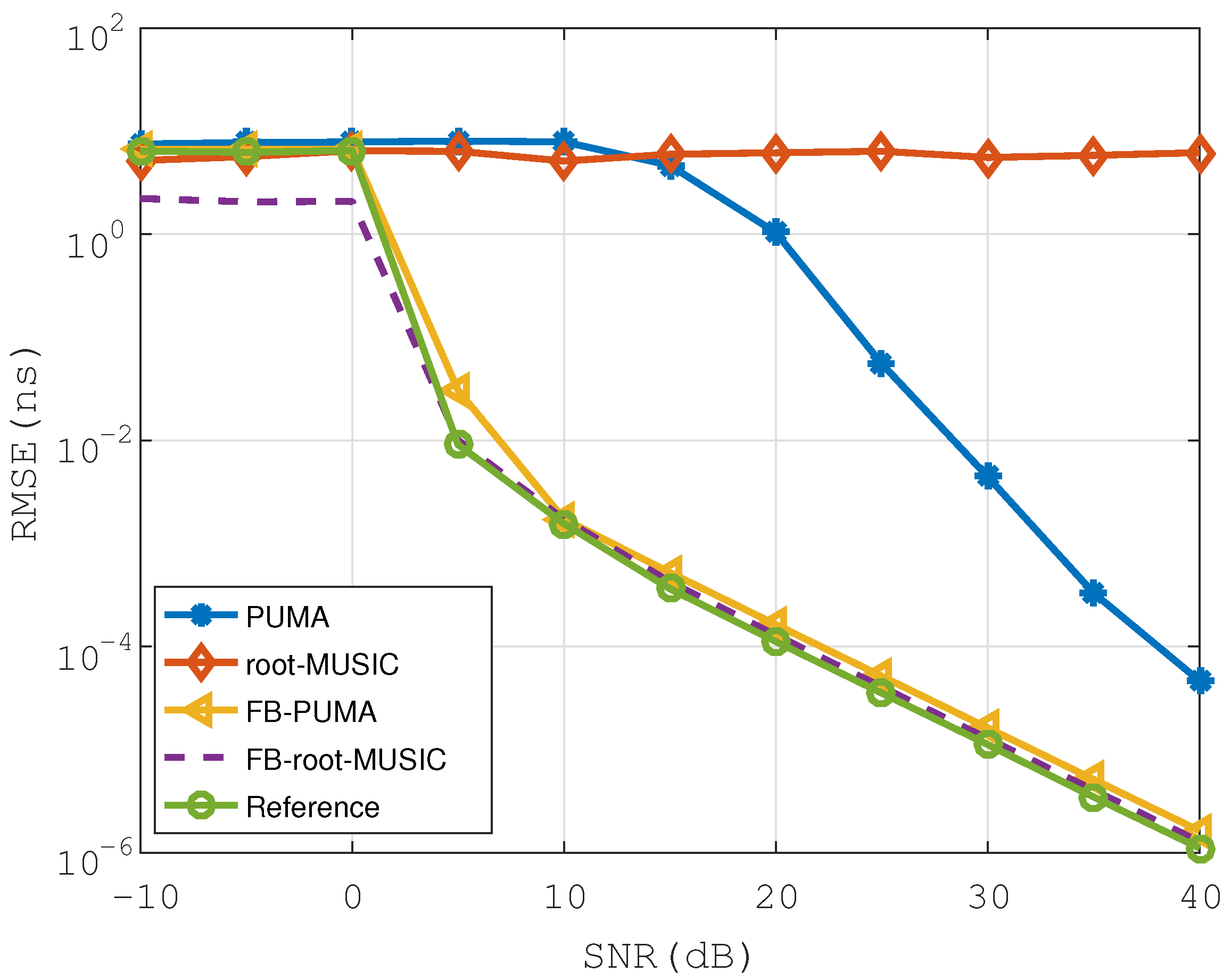
5.3. Scenario 2: Full Correlation between the Overlapping Echoes
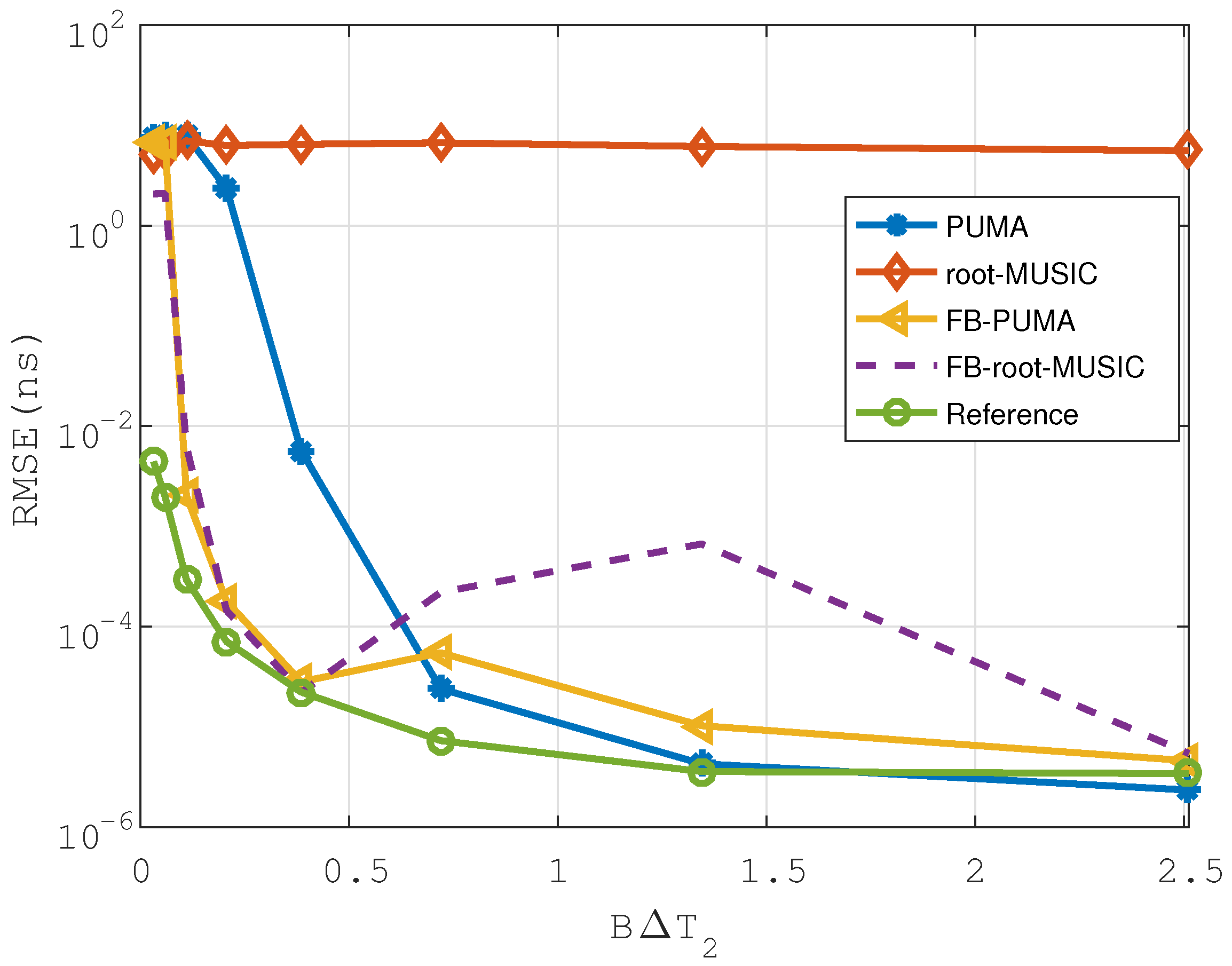
5.4. Scenario 3: Full Correlation between Echoes
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Modified FB Covariance Matrix
Appendix B. Modified MSSP Covariance Matrix
References
- Solla, M.; Pérez-Gracia, V.; Fontul, S. A Review of GPR Application on Transport Infrastructures: Troubleshooting and Best Practices. Remote Sens. 2021, 13, 672. [Google Scholar] [CrossRef]
- Saarenketo, T.; Scullion, T. Road evaluation with ground penetrating radar. J. Appl. Geophys. 2000, 43, 119–138. [Google Scholar] [CrossRef]
- Le Bastard, C.; Baltazart, V.; Wang, Y.; Saillard, J. Thin-pavement thickness estimation using GPR with high-resolution and superresolution methods. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2511–2519. [Google Scholar] [CrossRef]
- Batrakov, D.O.; Antyufeyeva, M.S.; Antyufeyev, O.V.; Batrakova, A.G. GPR application for the road pavements surveys. In Proceedings of the 2017 IEEE Microwaves, Radar and Remote Sensing Symposium (MRRS), Kiev, Ukraine, 29–31 August 2017; pp. 81–84. [Google Scholar] [CrossRef]
- Marecos, V.; Fontul, S.; Solla, M.; de Lurdes Antunes, M. Evaluation of the feasibility of Common Mid-Point approach for air-coupled GPR applied to road pavement assessment. Measurement 2018, 128, 295–305. [Google Scholar] [CrossRef]
- Bianchini Ciampoli, L.; Tosti, F.; Economou, N.; Benedetto, F. Signal processing of GPR data for road surveys. Geosciences 2019, 9, 96. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.; Xie, X.; Huang, H. Application of ground penetrating radar in grouting evaluation for shield tunnel construction. Tunn. Undergr. Space Technol. 2010, 25, 99–107. [Google Scholar] [CrossRef]
- Alani, A.M.; Tosti, F. GPR applications in structural detailing of a major tunnel using different frequency antenna systems. Constr. Build. Mater. 2018, 158, 1111–1122. [Google Scholar] [CrossRef]
- Kilic, G.; Eren, L. Neural network based inspection of voids and karst conduits in hydro–electric power station tunnels using GPR. J. Appl. Geophys. 2018, 151, 194–204. [Google Scholar] [CrossRef]
- Lyu, Y.Z.; Wang, H.H.; Gong, J.B. GPR detection of tunnel lining cavities and reverse-time migration imaging. Appl. Geophys. 2020, 2020, 1–7. [Google Scholar] [CrossRef]
- Qin, H.; Zhang, D.; Tang, Y.; Wang, Y. Automatic recognition of tunnel lining elements from GPR images using deep convolutional networks with data augmentation. Autom. Constr. 2021, 130, 103830. [Google Scholar] [CrossRef]
- Solla, M.; Lorenzo, H.; Riveiro, B.; Rial, F. Non-destructive methodologies in the assessment of the masonry arch bridge of Traba, Spain. Eng. Fail. Anal. 2011, 18, 828–835. [Google Scholar] [CrossRef]
- Fauchard, C.; Antoine, R.; Bretar, F.; Lacogne, J.; Fargier, Y.; Maisonnave, C.; Guilbert, V.; Marjerie, P.; Thérain, P.F.; Dupont, J.P.; et al. Assessment of an ancient bridge combining geophysical and advanced photogrammetric methods: Application to the Pont De Coq, France. J. Appl. Geophys. 2013, 98, 100–112. [Google Scholar] [CrossRef]
- Morris, I.; Abdel-Jaber, H.; Glisic, B. Quantitative attribute analyses with ground penetrating radar for infrastructure assessments and structural health monitoring. Sensors 2019, 19, 1637. [Google Scholar] [CrossRef] [Green Version]
- Alsharqawi, M.; Zayed, T.; Shami, A. Ground Penetrating Radar-Based Deterioration Assessment of RC Bridge Decks; Construction Innovation: Bingley, UK, 2020. [Google Scholar] [CrossRef]
- Gagarin, N.; Goulias, D.; Mekemson, J.; Cutts, R.; Andrews, J. Development of Novel Methodology for Assessing Bridge Deck Conditions Using Step Frequency Antenna Array Ground Penetrating Radar. J. Perform. Constr. Facil. 2020, 34, 04019113. [Google Scholar] [CrossRef]
- Manacorda, G.; Morandi, D.; Sarri, A.; Staccone, G. Customized GPR system for railroad track verification. In Proceedings of the Ninth International Conference on Ground Penetrating Radar, Santa Barbara, CA, USA, 29 April–2 May 2002; Volume 4758, pp. 719–723. [Google Scholar] [CrossRef]
- Xiao, J.; Liu, L. Permafrost subgrade condition assessment using extrapolation by deterministic deconvolution on multifrequency GPR data acquired along the Qinghai-Tibet railway. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 9, 83–90. [Google Scholar] [CrossRef]
- De Bold, R.; O’connor, G.; Morrissey, J.; Forde, M. Benchmarking large scale GPR experiments on railway ballast. Constr. Build. Mater. 2015, 92, 31–42. [Google Scholar] [CrossRef] [Green Version]
- Bianchini Ciampoli, L.; Calvi, A.; D’Amico, F. Railway ballast monitoring by GPR: A test-site investigation. Remote Sens. 2019, 11, 2381. [Google Scholar] [CrossRef] [Green Version]
- Ranalli, D.; Scozzafava, M.; Tallini, M. Ground penetrating radar investigations for the restoration of historic buildings: The case study of the Collemaggio Basilica (L’Aquila, Italy). J. Cult. Herit. 2004, 5, 91–99. [Google Scholar] [CrossRef]
- Masini, N.; Persico, R.; Rizzo, E. Some examples of GPR prospecting for monitoring of the monumental heritage. J. Geophys. Eng. 2010, 7, 190–199. [Google Scholar] [CrossRef]
- Leucci, G.; Masini, N.; Persico, R. Time–frequency analysis of GPR data to investigate the damage of monumental buildings. J. Geophys. Eng. 2012, 9, S81–S91. [Google Scholar] [CrossRef]
- Pérez-Gracia, V.; Solla, M. Inspection procedures for effective GPR surveying of buildings. In Civil Engineering Applications of Ground Penetrating Radar; Springer: Berlin/Heidelberg, Germany, 2015; pp. 97–123. [Google Scholar]
- Hugenschmidt, J.; Kalogeropoulos, A. The inspection of retaining walls using GPR. J. Appl. Geophys. 2009, 67, 335–344. [Google Scholar] [CrossRef]
- Ukleja, J.; Bęben, D.; Anigacz, W. Determination of the railway retaining wall dimensions and its foundation in difficult terrain and utility. AGH J. Min. Geoengin. 2012, 36, 299–308. [Google Scholar]
- Solla, M.; González-Jorge, H.; Álvarez, M.X.; Arias, P. Application of non-destructive geomatic techniques and FDTD modeling to metrical analysis of stone blocks in a masonry wall. Constr. Build. Mater. 2012, 36, 14–19. [Google Scholar] [CrossRef]
- Beben, D.; Anigacz, W.; Ukleja, J. Diagnosis of bedrock course and retaining wall using GPR. NDT E Int. 2013, 59, 77–85. [Google Scholar] [CrossRef]
- Spagnolini, U. Permittivity measurements of multilayered media with monostatic pulse radar. IEEE Trans. Geosci. Remote Sens. 1997, 35, 454–463. [Google Scholar] [CrossRef] [Green Version]
- Simonin, J.M.; Baltazart, V.; Le Bastard, C.; Derobert, X. Progress in monitoring the debonding within pavement structures during accelerated pavement testing on the fatigue carousel. In Proceedings of the 8th RILEM International Conference on Mechanisms of Cracking and Debonding in Pavements, Nantes, France, 7–9 June 2016; pp. 749–755. [Google Scholar]
- Lai, W.W.L.; Derobert, X.; Annan, P. A review of Ground Penetrating Radar application in civil engineering: A 30-year journey from Locating and Testing to Imaging and Diagnosis. NDT E Int. 2018, 96, 58–78. [Google Scholar]
- Al-Qadi, I.L.; Lahouar, S. Measuring layer thicknesses with GPR–Theory to practice. Constr. Build. Mater. 2005, 19, 763–772. [Google Scholar] [CrossRef]
- Sun, M.; Pan, J.; Le Bastard, C.; Wang, Y.; Li, J. Advanced signal processing methods for ground-penetrating radar: Applications to civil engineering. IEEE Signal Process. Mag. 2019, 36, 74–84. [Google Scholar] [CrossRef] [Green Version]
- Barabell, A. Improving the resolution performance of eigenstructure-based direction-finding algorithms. In Proceedings of the ICASSP’83, IEEE International Conference on Acoustics, Speech, and Signal Processing, Boston, MA, USA, 14–16 April 1983; Volume 8, pp. 336–339. [Google Scholar] [CrossRef]
- Qian, C.; Huang, L.; Cao, M.; Xie, J.; So, H.C. PUMA: An improved realization of MODE for DOA estimation. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2128–2139. [Google Scholar] [CrossRef]
- Chan, F.K.; So, H.C.; Sun, W. Subspace approach for two-dimensional parameter estimation of multiple damped sinusoids. Signal Process. 2012, 92, 2172–2179. [Google Scholar] [CrossRef] [Green Version]
- So, H.C.; Chan, F.K.; Lau, W.H.; Chan, C.F. An efficient approach for two-dimensional parameter estimation of a single-tone. IEEE Trans. Signal Process. 2009, 58, 1999–2009. [Google Scholar] [CrossRef] [Green Version]
- Qian, C.; Huang, L.; Sidiropoulos, N.D.; So, H.C. Enhanced PUMA for direction-of-arrival estimation and its performance analysis. IEEE Trans. Signal Process. 2016, 64, 4127–4137. [Google Scholar] [CrossRef]
- Shahimaeen, A.; Dehghani, M.J.; Dodangeh, M. Two-dimensional DOA estimation for noncoherent and coherent signals using subspace approach. Trans. Emerg. Telecommun. Technol. 2019, 30, 3752. [Google Scholar] [CrossRef]
- Haardt, M.; Nossek, J.A. Unitary ESPRIT: How to obtain increased estimation accuracy with a reduced computational burden. IEEE Trans. Signal Process. 1995, 43, 1232–1242. [Google Scholar] [CrossRef]
- Pesavento, M.; Gershman, A.B.; Haardt, M. Unitary root-MUSIC with a real-valued eigendecomposition: A theoretical and experimental performance study. IEEE Trans. Signal Process. 2000, 48, 1306–1314. [Google Scholar] [CrossRef]
- Yamada, H.; Ohmiya, M.; Ogawa, Y.; Itoh, K. Superresolution techniques for time-domain measurements with a network analyzer. IEEE Trans. Antennas Propag. 1991, 39, 177–183. [Google Scholar] [CrossRef]
- Dérobert, X.; Baltazart, V.; Simonin, J.M.; Todkar, S.S.; Norgeot, C.; Hui, H.Y. GPR Monitoring of Artificial Debonded Pavement Structures throughout Its Life Cycle during Accelerated Pavement Testing. Remote Sens. 2021, 13, 1474. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tchana Tankeu, B.; Baltazart, V.; Wang, Y.; Guilbert, D. PUMA Applied to Time Delay Estimation for Processing GPR Data over Debonded Pavement Structures. Remote Sens. 2021, 13, 3456. https://doi.org/10.3390/rs13173456
Tchana Tankeu B, Baltazart V, Wang Y, Guilbert D. PUMA Applied to Time Delay Estimation for Processing GPR Data over Debonded Pavement Structures. Remote Sensing. 2021; 13(17):3456. https://doi.org/10.3390/rs13173456
Chicago/Turabian StyleTchana Tankeu, Bachir, Vincent Baltazart, Yide Wang, and David Guilbert. 2021. "PUMA Applied to Time Delay Estimation for Processing GPR Data over Debonded Pavement Structures" Remote Sensing 13, no. 17: 3456. https://doi.org/10.3390/rs13173456