1. Introduction
This study uses observation data from the Latvian CORS network, after post processing with the Bernese GNSS Software v5.2 in kinematic mode with a sampling interval of 90 s. These results are used for the study of the Latvian CORS vulnerability control and for the statistical analysis of discrepancies in relation to the TEC and the ROTI levels. The objective of this study is to assess the risks of the CORS reliability for RTK measurements, and the publicly available TEC and ROTI reliability in connection with ionospheric irregularities in the midlatitude region of Latvia.
The term space weather refers to conditions on the sun, solar wind, and Earth’s magnetosphere, ionosphere, and thermosphere that can affect the performance and reliability of space- and ground-based technological systems and can endanger human life or health [
1]. Improving the understanding and characterization of the effects of space weather phenomena on the Earth and in the space can increase situational awareness, inform decision making, and enable missions to be carried out that depend on technologies and services susceptible to disruption from space weather [
2].
Ionospheric disturbances on a small scale can lead to fluctuations in the received satellite signal, so-called signal scintillations. Within GNSS, this reduces the positioning accuracy. Particularly strong events can even lead to a Loss-of-Lock between satellite and receiver, which can delay or completely invalidate a positioning solution. Every GNSS user is affected, especially users with high demands on accuracy, integrity, availability, and continuity [
3].
Multiple studies of ionospheric scintillations have been performed. However, the global climate is evolving, and atmosphere irregularities are changing. The use of GNSS positioning is increasing in various applications and the awareness of space weather impact on GNSS observations is increasing.
Spogli et al. [
4] discussed the possibility of investigating the dynamics of ionospheric irregularities causing scintillation by combining the information coming from a wide range of latitudes. The authors analyzed the data of ionospheric scintillation from latitudes 44–88° N during October, November and December 2003.
Similar work was carried out in Belgium by Stankov et al. [
5] by studying GPS signal delay during geomagnetic storms of 29 October and 20 November 2003. The anomalous movement of ionosphere walls was studied [
5]. Similar ionospheric gradients were found. Instead of the traditional Instrument Landing System (ILS), several prototype airports have used systems for GNSS landings and takeoffs. These prototype airports are in areas in which the occurrence of scintillation is negligible [
6,
7,
8]. Stankov et al. [
5] suggest that one important objective is to assess the integrity risk to GBAS/ SBAS services.
Liu et al. [
9] studied the variation characteristics of the GPS-based TEC fluctuations over 21 regions of China. They studied the fluctuation intensity at various latitudes, in daytime and nighttime, during winter and summer. The ROTI indices were used to investigate the characteristics of the ionospheric TEC fluctuations during 11-year solar cycle 2002–2012 [
9].
To classify the relevant orders of the magnitude and the occurrence rates Hlubek et al. [
3] employed a statistical approach and large amounts of measured data were aggregated. The research by Hlubek et al. [
3] concluded that a double-peak structure with the greatest scintillation intensity was observed during the spring and autumn equinoxes.
Research on the correlation between GNSS-derived ionospheric spatial de-correlation and space weather intensity for safety-critical differential GNSS systems was carried out by Lee and Lee [
8]. Space weather events that occurred in 2015 have been extensively analyzed by the research society around the world. Cherniak et al. [
10] investigated the dynamics of the high-latitude ionospheric irregularities during 17 March 2015 (St. Patrick’s Day Storm), using ground-based GPS measurements. The St. Patrick’s Day geomagnetic storm has been widely considered [
10,
11,
12,
13,
14,
15].
The results reveal interhemispheric differences in the occurrence of ionospheric irregularities. Research on variations of the TEC over the Iberian Peninsula in 2015 was performed by Morozova et al. [
11], highlighting the effects of geomagnetic storms, solar flares, and solar eclipses. These authors showed that no definitive conclusions about the dependence of the TEC variation during geomagnetic storms on the season or start time can be made.
At high latitudes, the dynamic behavior of the ionosphere is dominated by the solar wind and electron precipitation (aurora borealis and aurora australis). In mid latitudes, ionospheric dynamics are dominated by the inner magnetosphere and neutral winds, the knowledge of which is incomplete [
16].
Advanced studies are carried out by using space-borne exploration techniques like ionosondes, LiDAR, radio waves [
17]. The geomagnetic field of the upper atmosphere, the ionospheric plasma and the GPS signal propagation in line of sight from explorer satellite to the GPS vehicle were studied in, for example, the ESA Swarm mission [
18].
In high latitudes, Park et al. [
19] presented the morphology of GPS TEC “perturbations” with emphasis on the orientation of plasma structures with respect to the line-of-sight direction (CHAMP mission).
Jin et al. and Park et al. [
18,
19] present the first comprehensive statistical results of high latitude ionospheric plasma irregularities and their dependence on the interplanetary magnetic field (IMF) configurations.
The impact of space weather on the GNSS positioning, navigation, and timing has been recognized as a serious threat [
20] to the operational quality of GBAS and SBAS, and for many other positioning and navigation applications as well, such as for remote sensing vehicles, satellites, aviation, cars, trucks, farming, construction, snow removal, etc. Distortion of GNSS signals is of concern for many applications, especially those related to Safety-of-Life. However, despite the fact that the studies of the space weather are developed, not so many research activities are devoted to study the infallibility of the CORS depending on the size of the network and the covered territory.
In our study, performed at the Institute of Geodesy and Geoinformatics, University of Latvia (GGI), the Latvian CORS ground-based GPS observations were collected during the 24th solar cycle. Latvian CORS data is regularly post-processed by the GGI for the Permanent GNSS Network densification of the Regional Reference Frame Sub-Commission for Europe (EUREF), as well as for the EPOS (European Plate Observing System) program [
21].
The statistical data of the results of the space weather impact on GPS observations are presented in this study. Conclusions on the security level of the Latvian CORS will be drawn on the basis of these statistics. At the end of this study, Pearson’s correlation analysis is performed on the relation characteristics of both the TEC and the ROTI to the impacted GPS positioning discrepancies. The assessment of the TEC and ROTI irregularities will be discussed.
4. Discussion
The impact of space weather on GNSS positioning, navigation and timing has been recognized by many authors as a threat [
5,
20] to the operational quality of SBAS and GBAS, as well as to many other positioning and navigation applications. The Latvian CORS serves as a basis for the RTK measurements which are used for the land surveying, cadaster and many other branches of engineering, including remote sensing and mapping. So far, no studies have been conducted on the impact of space weather on CORS in Latvia. The researchers of the GGI are working on national geoid improvement and on the application of the digital zenith camera, where short-term GNSS positioning and timing is used [
29]. After this study, attention will be paid to the information on space weather and solar activities in the validation of GNSS high quality applications. Faulty solutions in the current study are caused by ionospheric irregularities which are discovered in a specific manner by the application of Bernese GNSS Software v5.2. Other methods, used in the studies of the ionospheric irregularities are reported in most of the references mentioned above.
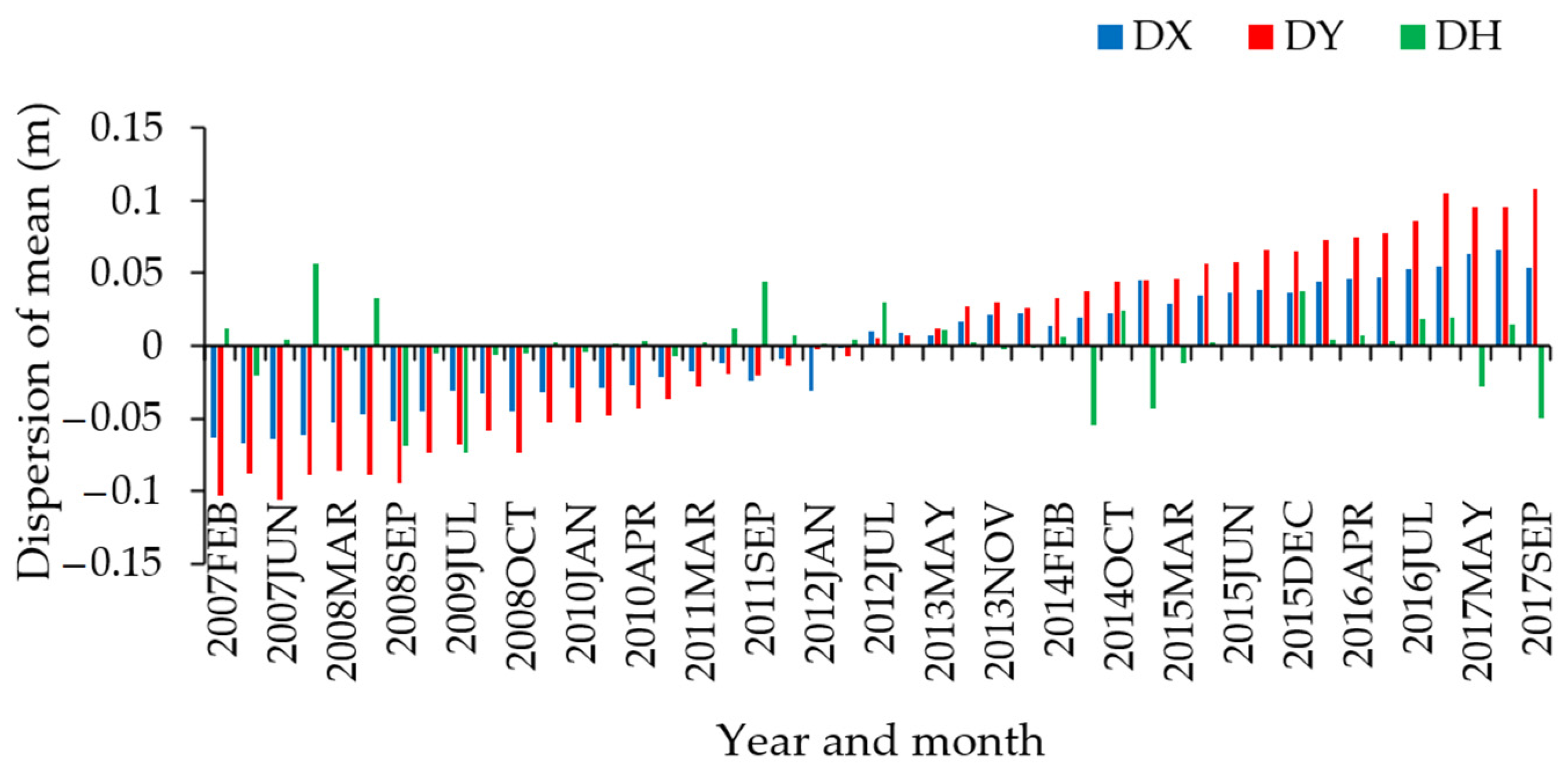
This study shows that there exists a weak correlation between faulty positioning results and the applied TEC and even ROTI information on ionospheric irregularities caused by solar activity. However, the highest sun activity of the 24th solar cycle occurred in years 2013–2015. The largest positioning disturbances and the frequency of faults appeared in March 2015.
Many research papers are devoted to the studies of the ionospheric irregularities, the TEC fluctuation [
19,
30,
31,
32] and the impact on GNSS and their correlation with GNSS positioning errors [
4]. The current research results are, in principle, in agreement with them (Belgium 2002–2012 [
30], Northern Europe 2009 [
31], China [
32]), but the approach of this study is different. However, Norwegian researchers have carried out the positioning tests with 5-minute resolution in a much shorter time span than 11 years, and they concluded that there is a good correlation of the ROTI and the GNSS positioning errors in the high geographical latitudes of Norway [
4]. The results in China show significant regional differences at different latitudes [
9]. Liu et al. concluded that “relevant discussions of this phenomenon are still relatively rare, so our results contribute to the development of a more in-depth understanding of irregular ionospheric activities, specifically the characteristics and features that occur over China” [
9].
5. Conclusions
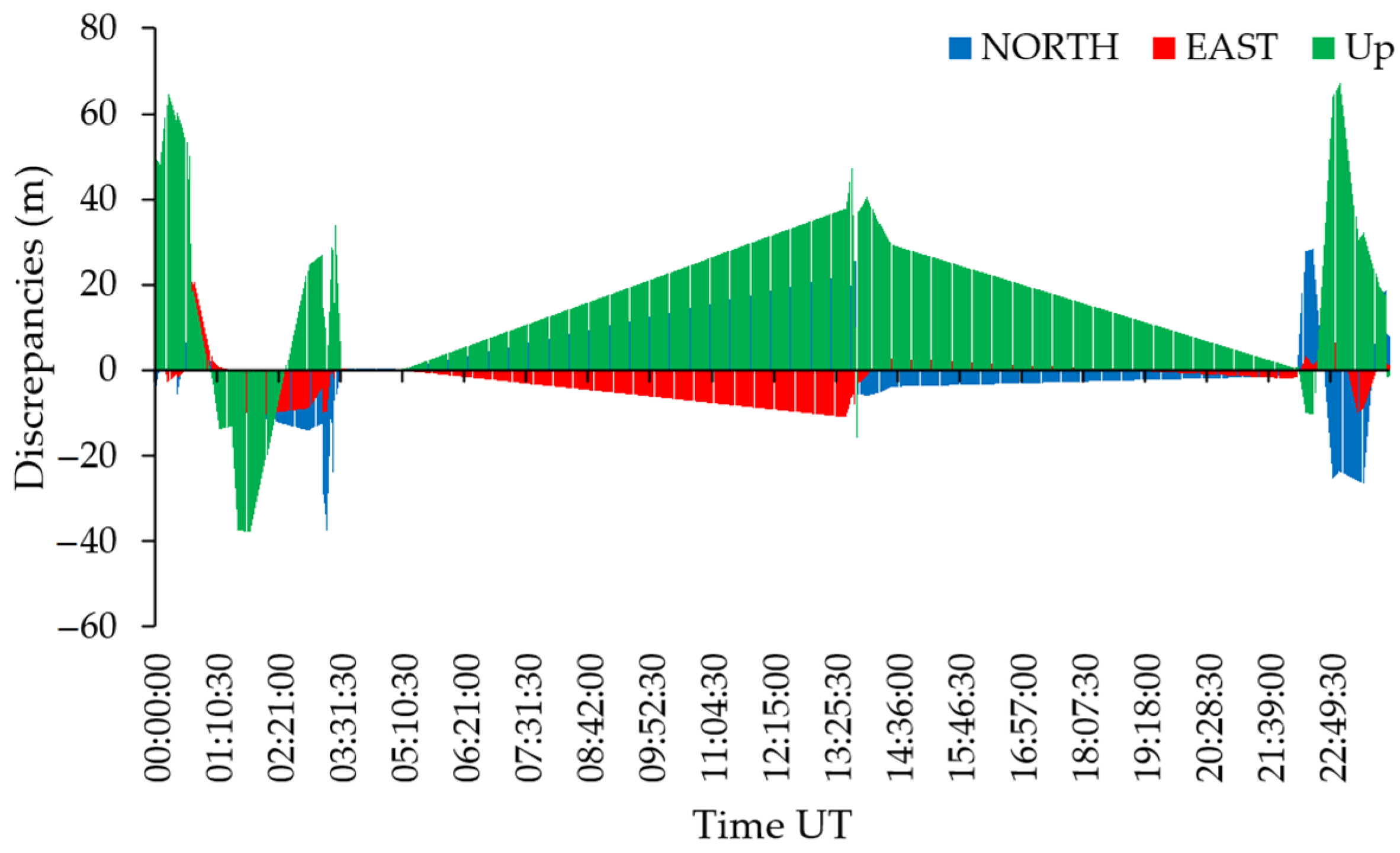
The results show that 0.6% of the solutions appeared with discrepancies in position greater than 10 cm. The largest positioning disturbances and their frequency appeared in March 2015 during the highest sun activity of the 24th solar cycle in years 2013–2015. A very strong geomagnetic storm with Kp index 8 occurred on 6–8 September 2017over the territory of Canada and USA, but this geomagnetic storm did not cover the territory of Latvia. Geomagnetic storm of 17 March 2015 was the only solar activity event that created significant (~500 m) positioning disturbances in the Latvian CORS stations.
The Pearson’s correlation coefficients were computed in order to validate the relation between the TEC maximum values over the territory of Latvia. Positioning discrepancies of the Bernese GNSS Software v5.2 solutions discovers that correlation is weak. The ROTI analysis also demonstrated a weak correlation. Even the sum of CSLP and faulty solutions showed a weak correlation between the TEC and the ROTI as well. The performed correlation analysis revealed that the global TEC approximation models are not suitable for the study of the local TEC anomalies. The GPS receiver onboard the ESA Swarm satellite provided the TEC between Swarm and GPS satellite. These electron high-density plasma patches are highly structured with significantly enhanced density fluctuation [
18]. This could probably confirm the eventually significant small fluctuation of the TEC that are not included in the global TEC and ROTI models.
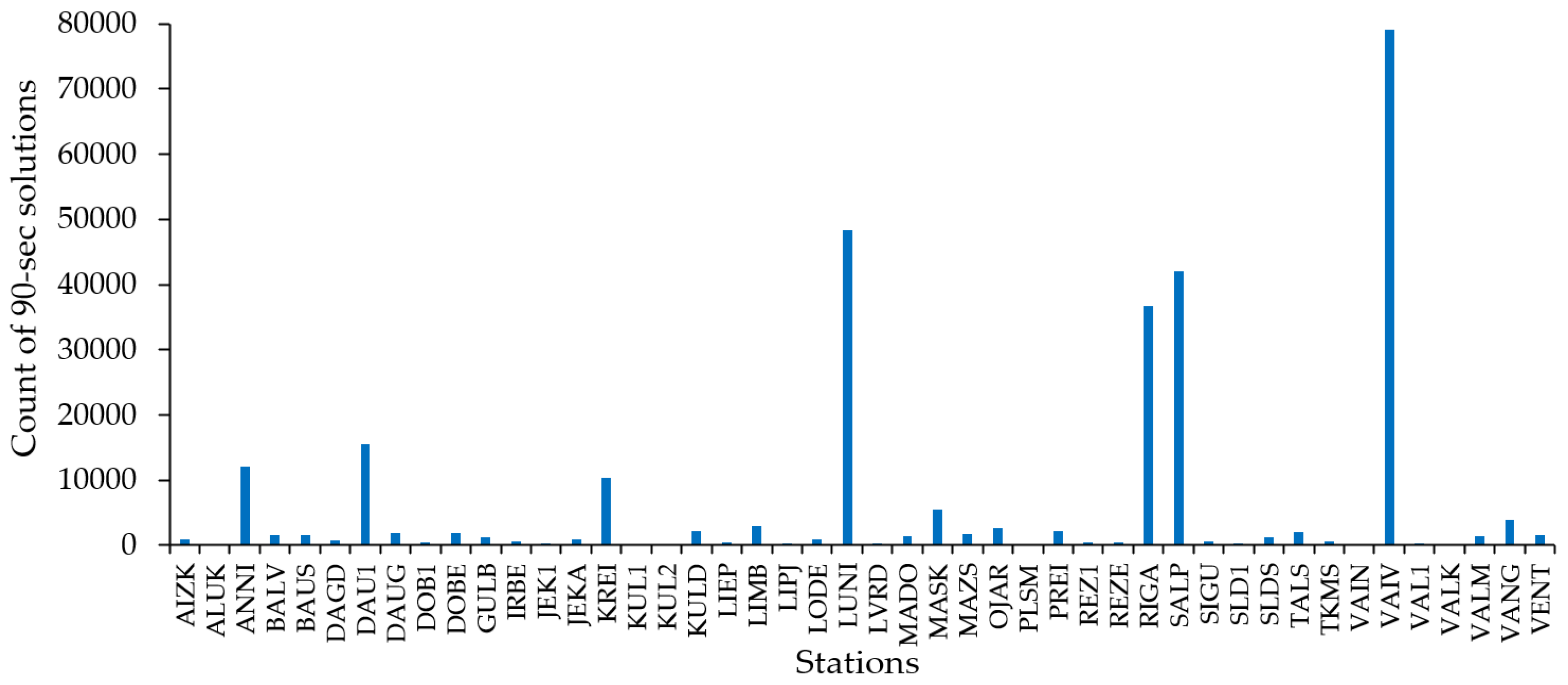
The monthly discrepancy diagrams revealed simultaneous discrepancies at numerous individual stations. The output was analyzed, and it was identified that for several stations, the disturbed solutions usually appeared more than 150–200 times. This is assumed to be the Loss-of-Lock of GNSS receivers. The conclusion arises on the dependency between the Loss-of-Lock of GNSS receivers and the GNSS receivers’ network geometry and the size of the territorial coverage.
The Loss-of-Lock affected a single operating GNSS receiver the most, which is not included in any network.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}