
A Fast Hyperspectral Anomaly Detection Algorithm Based on Greedy Bilateral Smoothing and Extended Multi-Attribute Profile



Abstract
:1. Introduction
2. Related Work
2.1. Low-Rank and Sparse Matrix Decomposition
2.2. Extended Morphological Attribute Profile
3. Proposed Method
3.1. GBSAED Method Flowchart
3.2. Fast Extraction of Abnormal Spectral Features Using Greedy Bilateral Smoothing
3.3. Extracting Abnormal Spatial Features Based on the Extended Multi-Attribute Profile
3.4. Proposed GBSAED Algorithm
| Algorithm 1. GBSAED framework for hyperspectral anomaly detection |
| Input: Hyperspectral image; rank rank step ; power ; soft thresholding ; tolerance ; |
Output: A two-dimensional detection result.
|
4. Experimental Results and Analysis
4.1. Experiment Setup
4.2. Hyperspectral Datasets
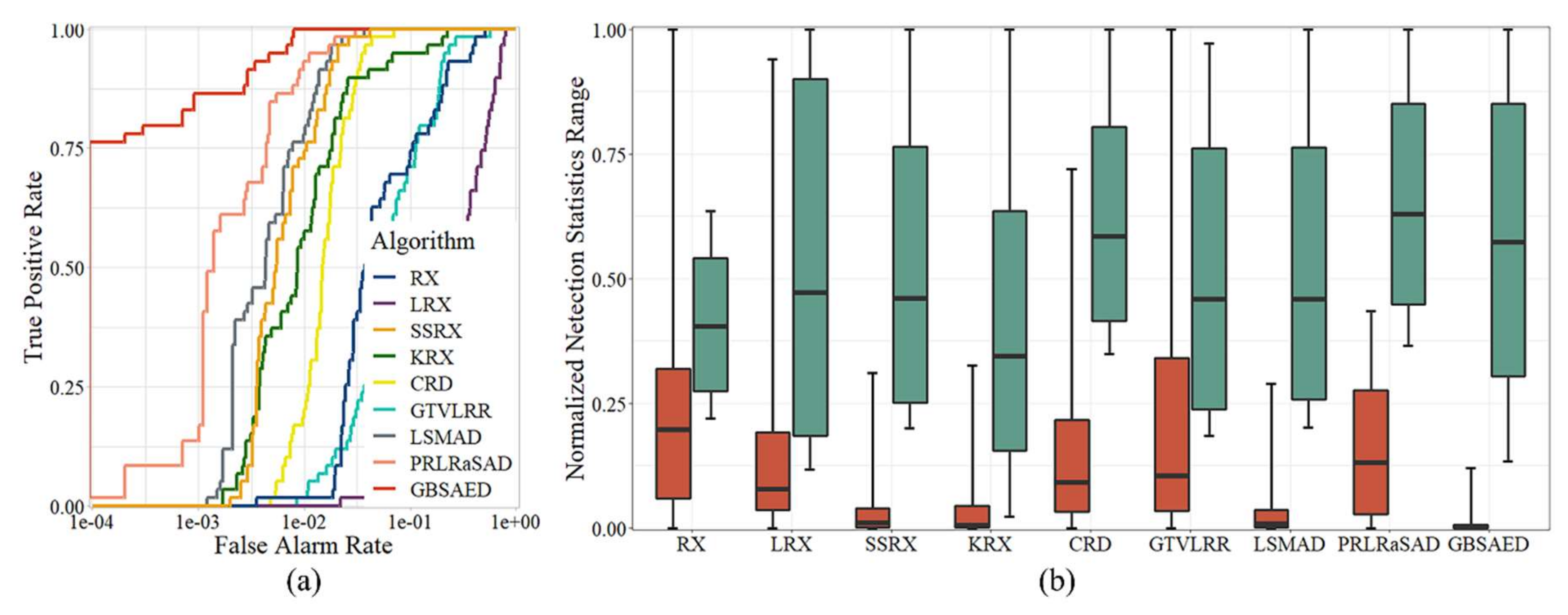
4.3. Detection Performance
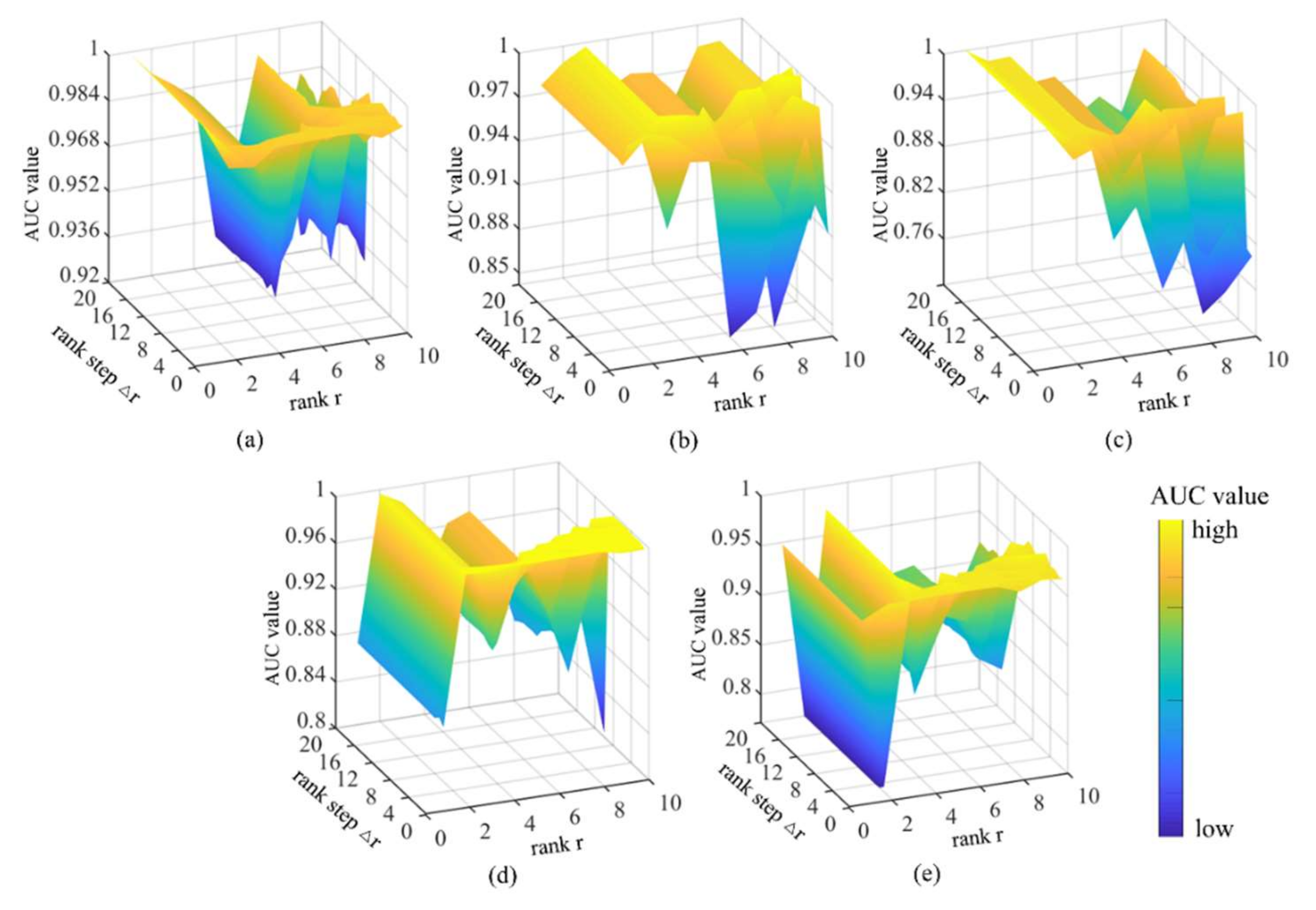
4.4. Parameter Setting Considerations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bioucas-Dias, J.M.; Plaza, A.; Camps-Valls, G.; Scheunders, P.; Nasrabadi, N.; Chanussot, J. Hyperspectral Remote Sensing Data Analysis and Future Challenges. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–36. [Google Scholar] [CrossRef] [Green Version]
- Stein, D.; Beaven, S.G.; Hoff, L.E.; Winter, E.M.; Stocker, A.D. Anomaly detection from hyperspectral imagery. IEEE Signal Process. Mag. 2002, 19, 58–69. [Google Scholar] [CrossRef] [Green Version]
- Plaza, A.; Benediktsson, J.A.; Boardman, J.W.; Brazile, J.; Bruzzone, L.; Camps-Valls, G.; Chanussot, J.; Fauvel, M.; Gamba, P.; Gualtieri, A.; et al. Recent advances in techniques for hyperspectral image processing. Remote Sens. Environ. 2009, 113, S110–S122. [Google Scholar] [CrossRef]
- Zhang, Y.; Fan, Y.; Xu, M.; Li, W.; Zhang, G.; Liu, L.; Yu, D. An Improved Low Rank and Sparse Matrix Decomposition-Based Anomaly Target Detection Algorithm for Hyperspectral Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 2663–2672. [Google Scholar] [CrossRef]
- Chang, C.I.; Chiang, S.S. Anomaly detection and classification for hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1314–1325. [Google Scholar] [CrossRef] [Green Version]
- Nasrabadi, N. Hyperspectral Target Detection: An Overview of Current and Future Challenges. IEEE Signal Process. Mag. 2013, 31, 34–44. [Google Scholar] [CrossRef]
- Jia, S.; Deng, X.; Zhu, J.; Xu, M.; Zhou, J.; Jia, X. Collaborative Representation-Based Multiscale Superpixel Fusion for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Senss. 2019, 57, 7770–7784. [Google Scholar] [CrossRef]
- Yang, W.; Peng, J.; Sun, W.; Du, Q. Log-Euclidean Kernel-Based Joint Sparse Representation for Hyperspectral Image Classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 12, 5023–5034. [Google Scholar] [CrossRef]
- Zhang, Y.; Fan, Y.; Xu, M. A Background-Purification-Based Framework for Anomaly Target Detection in Hyperspectral Imagery. IEEE Geosci. Remote Sens. Lett. 2019, 17, 1–5. [Google Scholar] [CrossRef]
- Manolakis, D.; Truslow, E.; Pieper, M.; Cooley, T. Detection Algorithms in Hyperspectral Imaging Systems: An Overview of Practical Algorithms. IEEE Signal Process. Mag. 2014, 31, 24–33. [Google Scholar] [CrossRef]
- Eismann, M.T.; Stocker, A.D.; Nasrabadi, N.M. Automated Hyperspectral Cueing for Civilian Search and Rescue. Proc. IEEE 2009, 97, 1031–1055. [Google Scholar] [CrossRef]
- Ma, D.; Yuan, Y.; Wang, Q. Hyperspectral Anomaly Detection Based on Separability-Aware Sample Cascade. Remote Sens. 2019, 11, 2537. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Zhang, Y. A New Hyperspectral Anomaly Detection Method Based on Higher Order Statistics and Adaptive Cosine Estimator. IEEE Geosci. Remote Sens. Lett. 2019, 17, 1–5. [Google Scholar] [CrossRef]
- Cheng, T.; Wang, B. Graph and Total Variation Regularized Low-Rank Representation for Hyperspectral Anomaly Detection. IEEE Trans. Geosci. Remote Sens. 2020, 58, 391–406. [Google Scholar] [CrossRef]
- Taghipour, A.; Ghassemian, H. Visual attention-driven framework to incorporate spatial-spectral features for hyperspectral anomaly detection. Int. J. Remote Sens. 2021, 42, 7454–7488. [Google Scholar] [CrossRef]
- Li, L.; Li, W.; Du, Q.; Tao, R. Low-Rank and Sparse Decomposition With Mixture of Gaussian for Hyperspectral Anomaly Detection. IEEE Trans. Cybern. 2021, 51, 4363–4372. [Google Scholar] [CrossRef]
- Ma, Y.; Fan, G.H.; Jin, Q.W.; Huang, J.; Mei, X.G.; Ma, J.Y. Hyperspectral Anomaly Detection via Integration of Feature Extraction and Background Purification. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1436–1440. [Google Scholar] [CrossRef]
- Huang, Z.; Kang, X.; Li, S.; Hao, Q. Game Theory-Based Hyperspectral Anomaly Detection. IEEE Trans. Geosci. Remote Sens. 2019, 58, 1–12. [Google Scholar] [CrossRef]
- Reed, I.S.; Yu, X. Adaptive multiple-band CFAR detection of an optical pattern with unknown spectral distribution. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1760–1770. [Google Scholar] [CrossRef]
- Schaum, A. Joint Subspace Detection of hyperspectral targets. In Proceedings of the IEEE Aerospace Conference 2004, Big Sky, MT, USA, 6–13 March 2004. [Google Scholar]
- Nasrabadi, N.M. Regularization for spectral matched filter and RX anomaly detector. In Proceedings of the Conference on Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery, Orlando, FL, USA, 11 April 2008. [Google Scholar]
- Kwon, H.; Nasrabadi, N.M. Kernel RX-algorithm: A nonlinear anomaly detector for hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 388–397. [Google Scholar] [CrossRef]
- Zhou, J.; Kwan, C.; Ayhan, B.; Eismann, M.T. A Novel Cluster Kernel RX Algorithm for Anomaly and Change Detection Using Hyperspectral Images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6497–6504. [Google Scholar] [CrossRef]
- Carlotto, M.J. A cluster-based approach for detecting man-made objects and changes in imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 374–387. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, B.; Ran, Q.; Gao, L.; Li, J.; Plaza, A. Weighted-RXD and Linear Filter-Based RXD: Improving Background Statistics Estimation for Anomaly Detection in Hyperspectral Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2351–2366. [Google Scholar] [CrossRef]
- Billor, N.; Hadi, A.S.; Velleman, P.F. BACON: Blocked adaptive computationally efficient outlier nominators. Comput. Stat. Data Anal. 2000, 34, 279–298. [Google Scholar] [CrossRef]
- Li, W.; Du, Q. Collaborative Representation for Hyperspectral Anomaly Detection. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1463–1474. [Google Scholar] [CrossRef]
- Li, J.; Zhang, H.; Zhang, L.; Ma, L. Hyperspectral Anomaly Detection by the Use of Background Joint Sparse Representation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 2523–2533. [Google Scholar] [CrossRef]
- Yang, X.; Wu, Z.; Li, J.; Plaza, A.; Wei, Z. Anomaly Detection in Hyperspectral Images Based on Low-Rank and Sparse Representation. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1990–2000. [Google Scholar]
- Rui, Z.; Bo, D.; Zhang, L. Hyperspectral Anomaly Detection via A Sparsity Score Estimation Framework. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3208–3222. [Google Scholar]
- Ling, Q.; Guo, Y.; Lin, Z.; An, W. A Constrained Sparse Representation Model for Hyperspectral Anomaly Detection. IEEE Trans. Geosci. Remote Sens. 2018, 57, 1–14. [Google Scholar] [CrossRef]
- Vafadar, M.; Ghassemian, H. Anomaly Detection of Hyperspectral Imagery Using Modified Collaborative Representation. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1–5. [Google Scholar] [CrossRef]
- Xi, C.; Liang, X.; Schneider, J. direct robust matrix factorizatoin for anomaly detection. In Proceedings of the 11th IEEE International Conference on Data Mining, ICDM 2011, Vancouver, BC, Canada, 11–14 December 2011. [Google Scholar]
- Sun, W.; Liu, C.; Li, J.; Lai, Y.M.; Li, W. Low-rank and sparse matrix decomposition-based anomaly detection for hyperspectral imagery. J. Appl. Remote Sens. 2014, 8, 083641. [Google Scholar] [CrossRef]
- Cui, X.; Yuan, T.; Weng, L.; Yang, Y. Anomaly detection in hyperspectral imagery based on low-rank and sparse decomposition. Int. Soc. Opt. Photonics 2014, 9069. [Google Scholar] [CrossRef]
- Zhang, Y.X.; Du, B.; Zhang, L.P.; Wang, S.G. A Low-Rank and Sparse Matrix Decomposition-Based Mahalanobis Distance Method for Hyperspectral Anomaly Detection. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1376–1389. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, J.; Song, S.; Zhang, C.; Liu, D. Low-Rank and Sparse Matrix Decomposition with Orthogonal Subspace Projection-Based Background Suppression for Hyperspectral Anomaly Detection. IEEE Geosci. Remote Sens. Lett. 2019, 17, 1–5. [Google Scholar] [CrossRef]
- Zhu, L.; Wen, G.; Qiu, S. Low-Rank and Sparse Matrix Decomposition with Cluster Weighting for Hyperspectral Anomaly Detection. Remote Sens. 2018, 10, 707. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Wei, H.; Zhang, L.; Shen, H.; Yuan, Q. Hyperspectral Image Restoration Using Low-Rank Matrix Recovery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4729–4743. [Google Scholar] [CrossRef]
- Zhou, T.; Tao, D. GoDec: Randomized low-rank & sparse matrix decomposition in noisy case. In Proceedings of Proceedings of the 28th International Conference on International Conference on Machine Learning, Bellevue, WA, USA, 28 June–2 July 2011; pp. 33–40. [Google Scholar]
- Pesaresi, M.; Benediktsson, J.A. A new approach for the morphological segmentation of high-resolution satellite imagery. IEEE Trans. Geosci. Remote Sens. 2002, 39, 309–320. [Google Scholar] [CrossRef] [Green Version]
- Dalla Mura, M.; Atli Benediktsson, J.; Waske, B.; Bruzzone, L. Extended profiles with morphological attribute filters for the analysis of hyperspectral data. Int. J. Remote Sens. 2010, 31, 5975–5991. [Google Scholar] [CrossRef]
- Mura, D.; Benediktsson, M.; Atli, J.; Bjrn, W.; Bruzzone, L. Morphological Attribute Profiles for the Analysis of Very High Resolution Images. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3747–3762. [Google Scholar] [CrossRef]
- Zhou, T.; Tao, D. Greedy Bilateral Sketch, Completion & Smoothing. JMLR ORG 2013, 31, 650–658. [Google Scholar]
- Kang, X.; Zhang, X.; Li, S.; Li, K.; Li, J.; Benediktsson, J.A. Hyperspectral Anomaly Detection With Attribute and Edge-Preserving Filters. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5600–5611. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detector | Parameter | Texas Coast | Belcher Bay | PaviaC | San Diego | Xiong’an |
|---|---|---|---|---|---|---|
| LRX | (Win, Wout) | (19, 21) | (19, 21) | (7, 9) | (11, 25) | (19, 21) |
| KRX | Wlength | 9 | 9 | 9 | 9 | 5 |
| Kernel function | Polynomial | Polynomial | Polynomial | Polynomial | Polynomial | |
| Kernel variance | 1 | 0.6 | 1.6 | 0.1 | 3 | |
| CRD | (Win, Wout) | (5, 9) | (15, 17) | (7, 9) | (15, 17) | (15, 17) |
| GTVLRR | Beta | 1000 | 0.01 | 1000 | 0.01 | 100 |
| Lambda | 0.01 | 0.01 | 0.001 | 0.1 | 0.1 | |
| Gamma | 0.01 | 0.001 | 0.01 | 0.01 | 0.01 | |
| LSMAD | r | 1 | 3 | 1 | 2 | 3 |
| Card | 3 | 1 | 1 | 1 | 5 | |
| Power | 1 | 9 | 1 | 10 | 1 | |
| PRLRaSAD | r | 2 | 2 | 1 | 2 | 2 |
| Card | 0.21 | 0.25 | 0.475 | 0.125 | 0.272 | |
| a | 100 | 100 | 100 | 100 | 100 | |
| GBSAED | r | 1 | 3 | 1 | 2 | 3 |
| 1 | 20 | 1 | 20 | 30 | ||
| K | 1 | 1 | 1 | 10 | 5 | |
| 0.001 | 0.001 | 0.001 | 0.001 | 0.001 | ||
| 1 | 1 | 1 | 1 | 1 |
| Detector | Texas Coast | Belcher Bay | PaviaC | San Diego | Xiong’an | Average (All Scenes) |
|---|---|---|---|---|---|---|
| RX | 0.9946 | 0.9617 | 0.9984 | 0.9112 | 0.9026 | 0.9537 |
| LRX | 0.9463 | 0.9975 | 0.9430 | 0.9461 | 0.9276 | 0.9521 |
| SSRX | 0.9801 | 0.9723 | 0.9877 | 0.9918 | 0.4482 | 0.8760 |
| KRX | 0.9938 | 0.9802 | 0.9993 | 0.979 | 0.9469 | 0.9798 |
| CRD | 0.9460 | 0.9929 | 0.9894 | 0.9821 | 0.9400 | 0.9701 |
| GTVLRR | 0.9799 | 0.9670 | 0.9975 | 0.9090 | 0.9402 | 0.9587 |
| LSMAD | 0.9988 | 0.9914 | 0.9998 | 0.9936 | 0.9735 | 0.9914 |
| PRLRaSAD | 0.9978 | 0.9057 | 0.9998 | 0.9964 | 0.9757 | 0.9751 |
| GBSAED | 0.9993 | 0.9999 | 0.9998 | 0.9993 | 0.9840 | 0.9965 |
| Detector | Texas Coast | Belcher Bay | PaviaC | San Diego | Xiong’an | Average (All Scenes) |
|---|---|---|---|---|---|---|
| RX | 0.094 | 0.154 | 0.051 | 0.079 | 0.138 | 0.103 |
| LRX | 38.937 | 49.081 | 8.417 | 49.263 | 83.620 | 45.864 |
| SSRX | 0.159 | 0.232 | 0.098 | 0.166 | 0.208 | 0.173 |
| KRX | 21.751 | 49.611 | 19.447 | 23.059 | 6.389 | 24.051 |
| CRD | 5.943 | 17.357 | 2.618 | 7.539 | 12.678 | 9.227 |
| GTVLRR | 127.234 | 278.054 | 95.241 | 96.602 | 212.809 | 161.988 |
| LSMAD | 8.527 | 17.018 | 4.380 | 7.847 | 14.190 | 10.392 |
| PRLRaSAD | 15.413 | 16.428 | 5.362 | 9.321 | 18.952 | 13.059 |
| GBSAED | 0.115 | 0.243 | 0.118 | 0.117 | 0.165 | 0.152 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, S.; Zhang, L.; Cen, Y.; Chen, L.; Wang, Y. A Fast Hyperspectral Anomaly Detection Algorithm Based on Greedy Bilateral Smoothing and Extended Multi-Attribute Profile. Remote Sens. 2021, 13, 3954. https://doi.org/10.3390/rs13193954
Liu S, Zhang L, Cen Y, Chen L, Wang Y. A Fast Hyperspectral Anomaly Detection Algorithm Based on Greedy Bilateral Smoothing and Extended Multi-Attribute Profile. Remote Sensing. 2021; 13(19):3954. https://doi.org/10.3390/rs13193954
Chicago/Turabian StyleLiu, Senhao, Lifu Zhang, Yi Cen, Likun Chen, and Yibo Wang. 2021. "A Fast Hyperspectral Anomaly Detection Algorithm Based on Greedy Bilateral Smoothing and Extended Multi-Attribute Profile" Remote Sensing 13, no. 19: 3954. https://doi.org/10.3390/rs13193954
APA StyleLiu, S., Zhang, L., Cen, Y., Chen, L., & Wang, Y. (2021). A Fast Hyperspectral Anomaly Detection Algorithm Based on Greedy Bilateral Smoothing and Extended Multi-Attribute Profile. Remote Sensing, 13(19), 3954. https://doi.org/10.3390/rs13193954