
Detection of Outliers in LiDAR Data Acquired by Multiple Platforms over Sorghum and Maize

Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Setting
2.2. Experimental Data
2.2.1. Stationary Scanning of Plants
2.2.2. Image-Based Point Clouds for the Sorghum Training Dataset
2.2.3. LiDAR Remote Sensing Data
2.3. Methodology
2.3.1. Geometric Approach
2.3.2. PointCleanNet-Based Outlier Removal
2.3.3. LAI Estimation
3. Results and Discussion
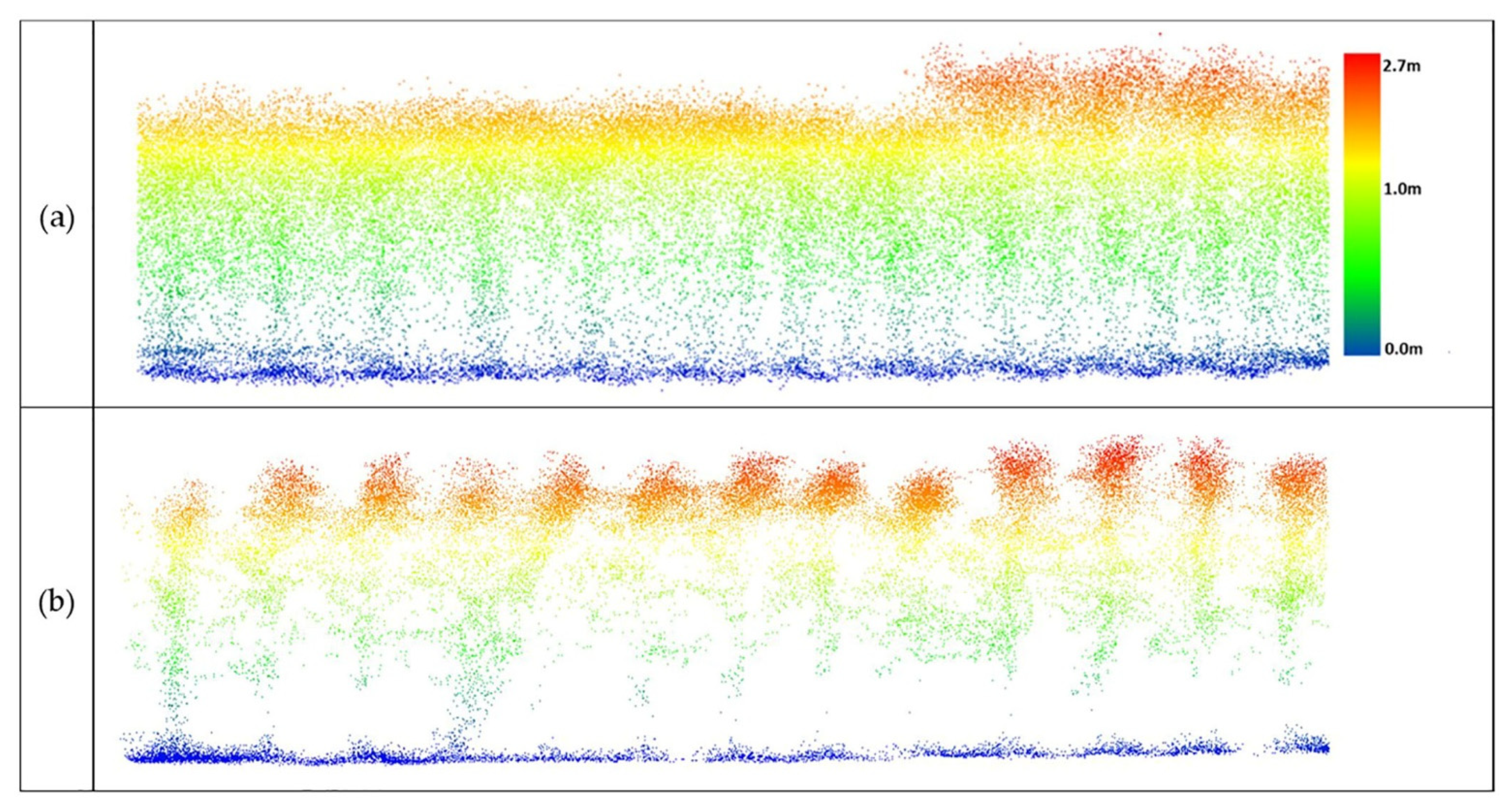
3.1. Geometric Outlier Removal from Individual Plants and Field Data
3.2. PointCleanNet Outlier Removal from Individual Plants and Field Data
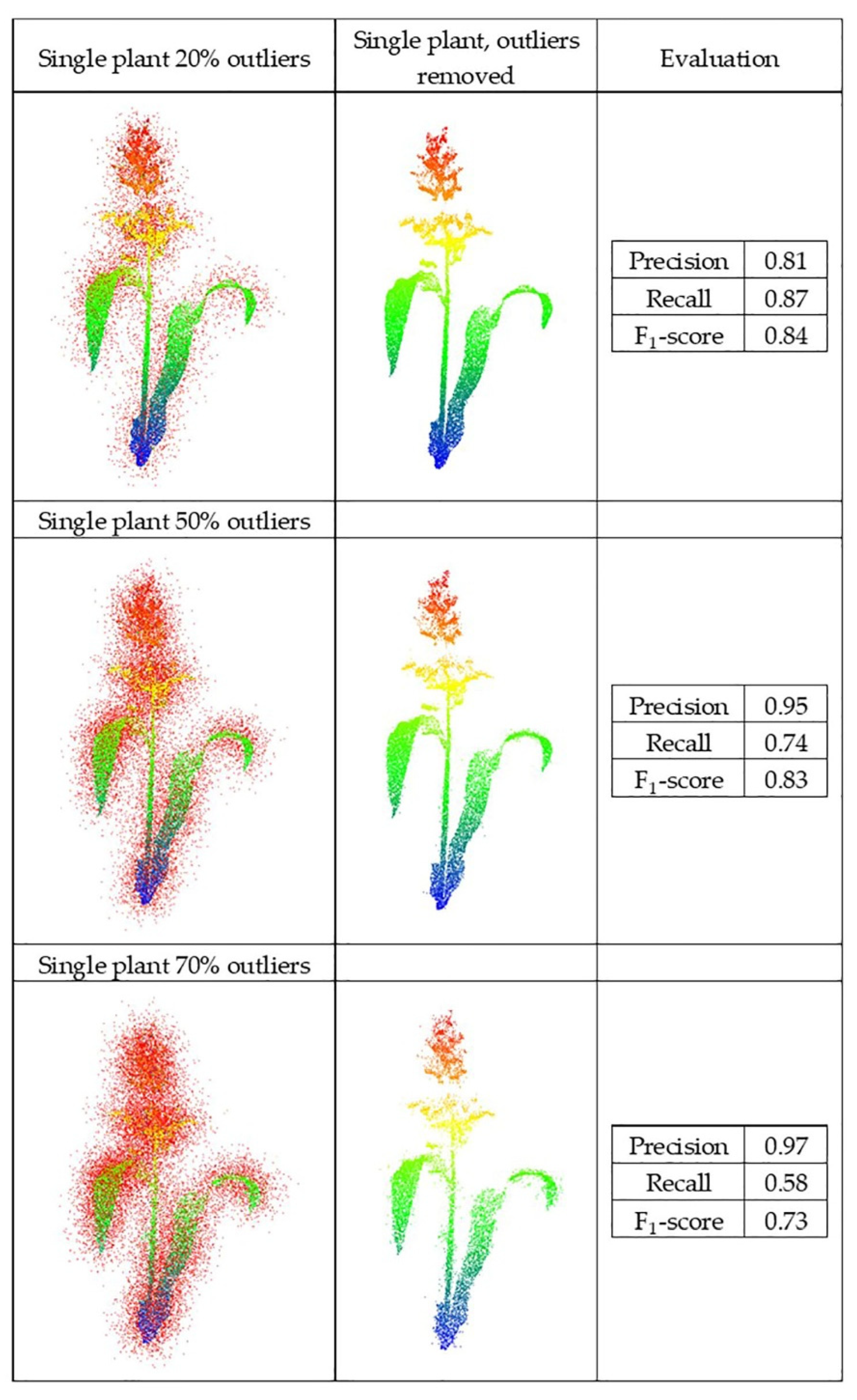
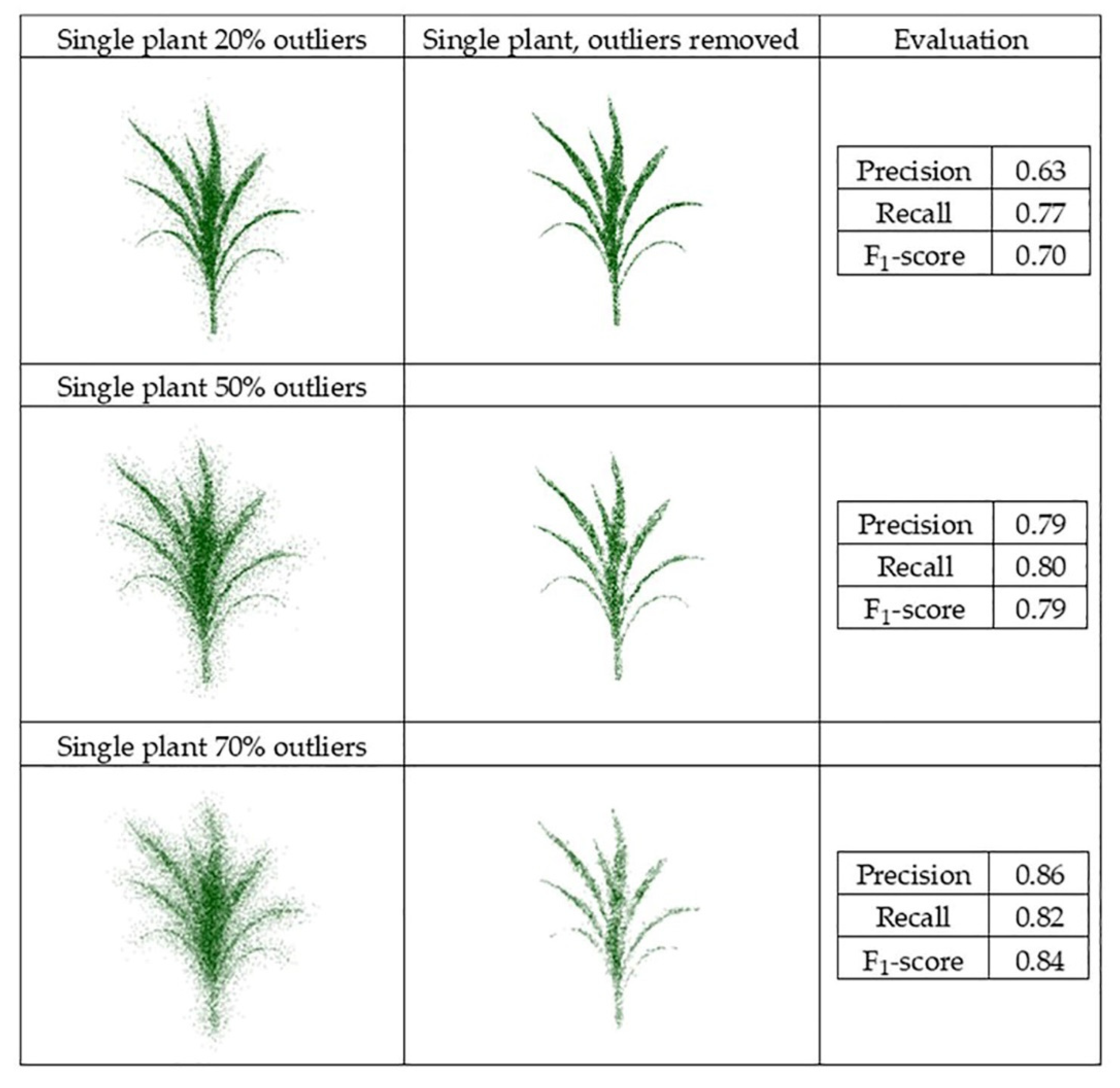
3.2.1. Single Plants
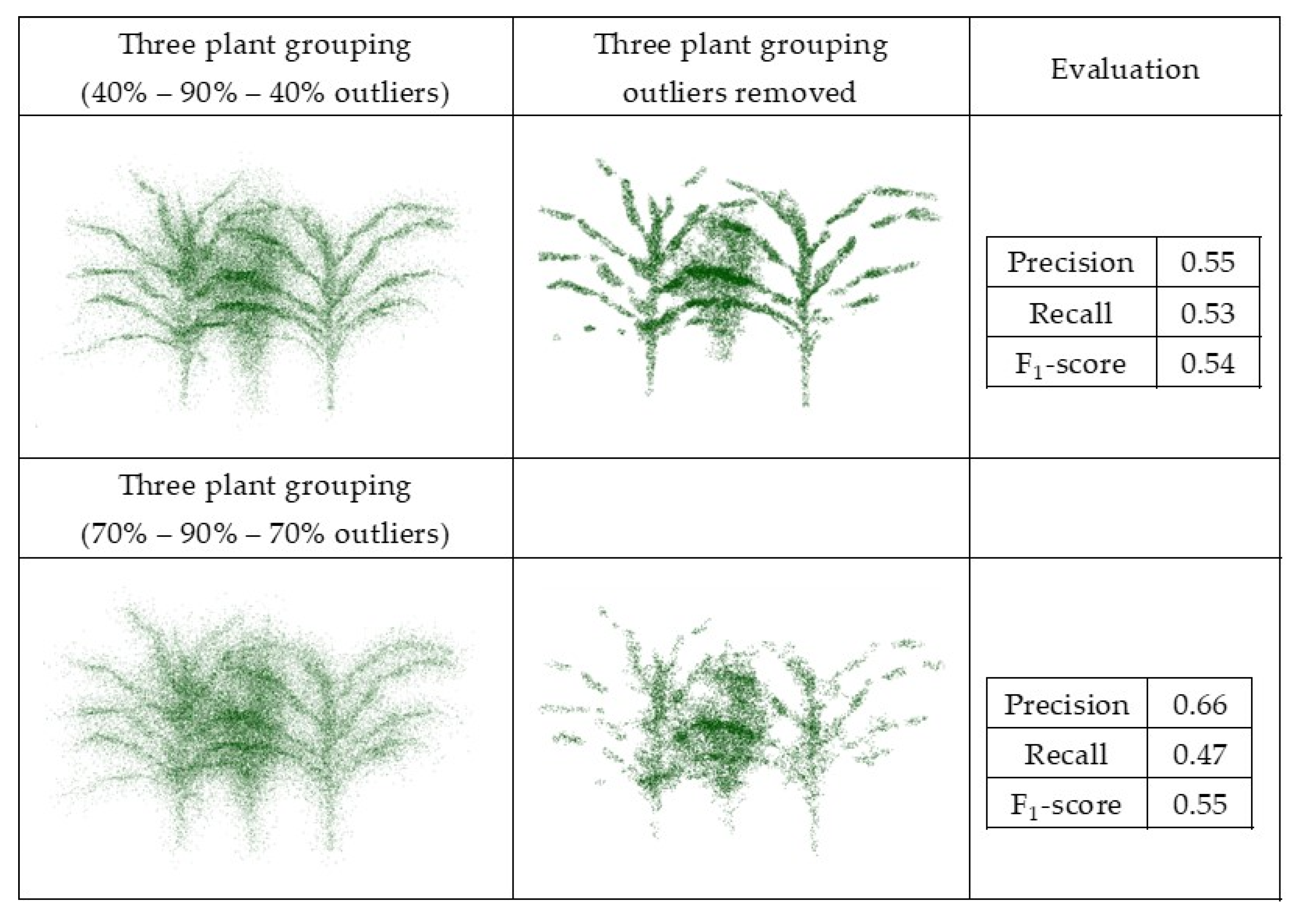
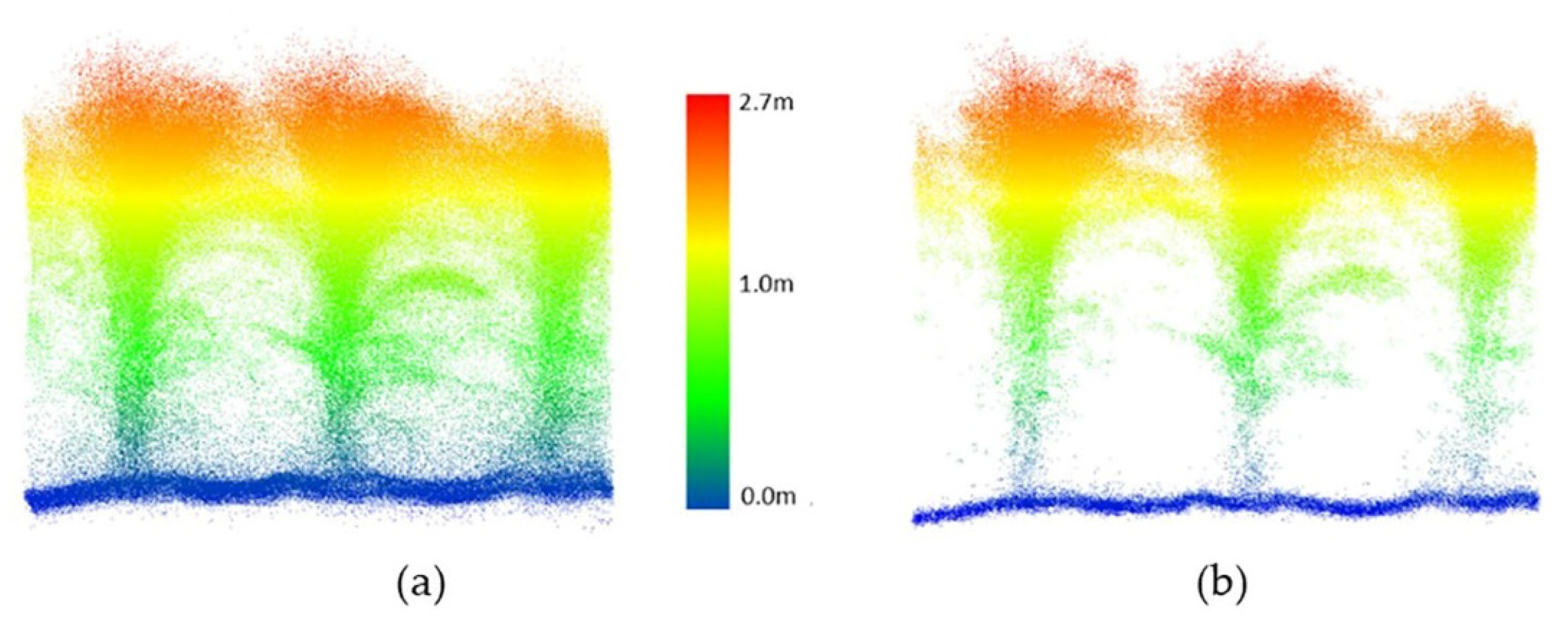
3.2.2. Outlier Removal from Maize and Sorghum Field Data
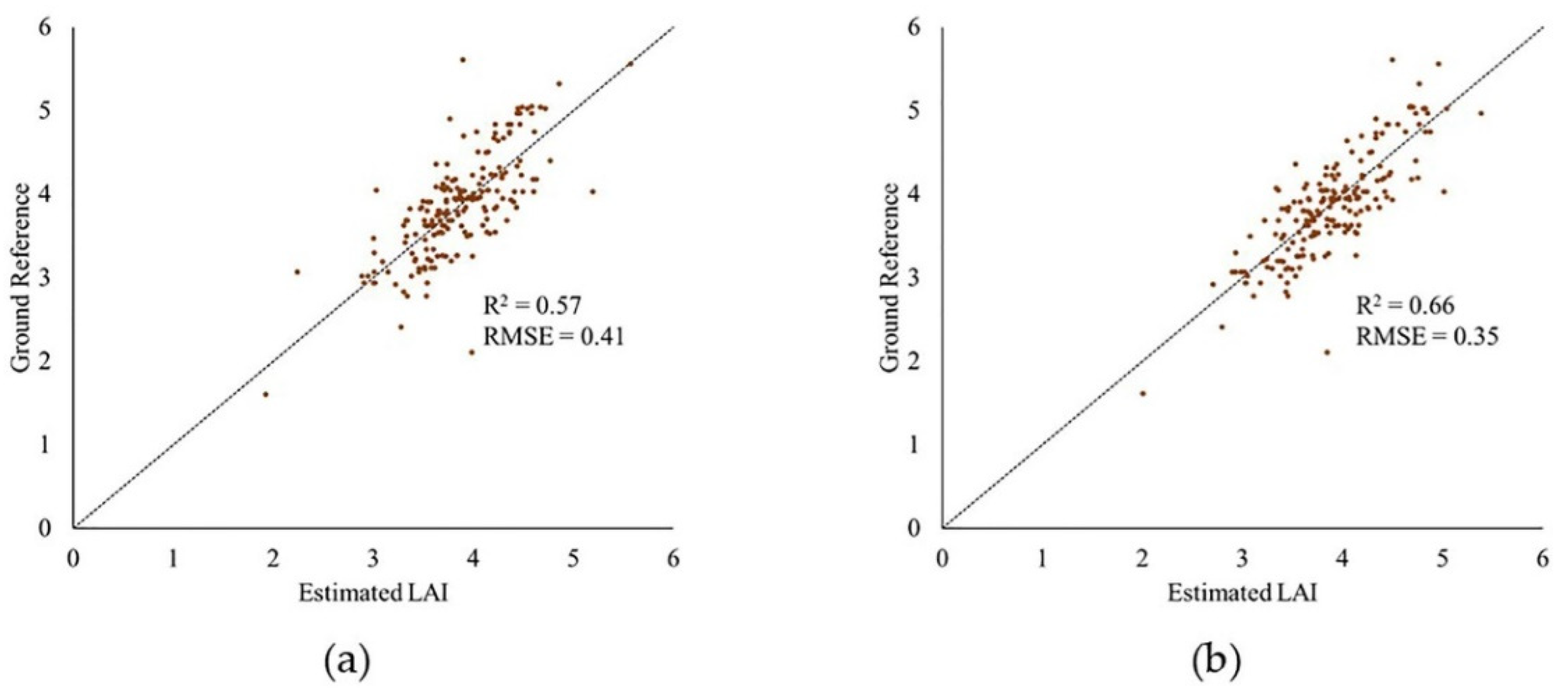
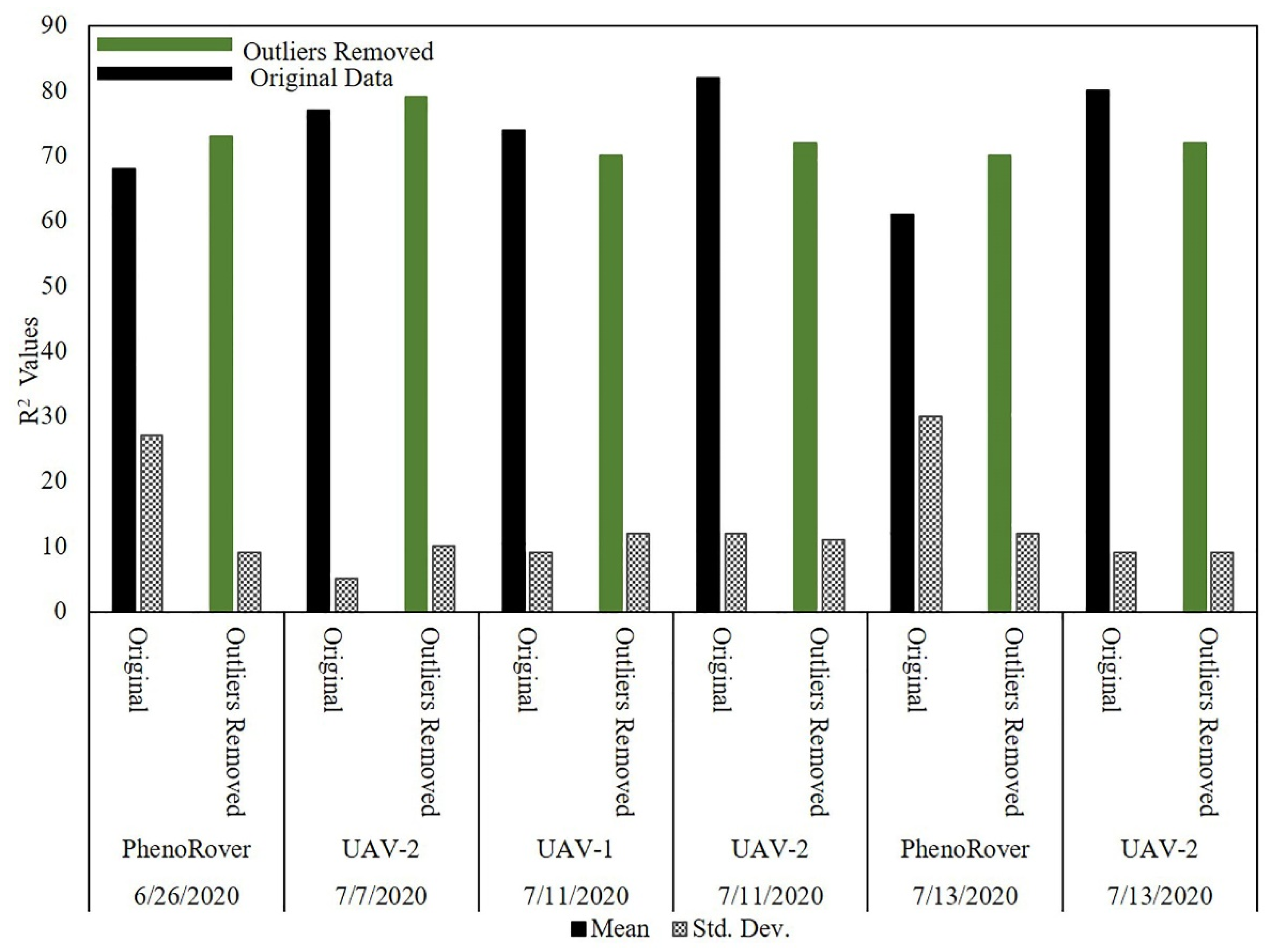
3.2.3. Impact of PointCleanNet Outlier Removal Method on LAI Estimation
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Deschaud, J.-E.; Goulette, F. Point Cloud Non Local Denoising Using Local Surface Descriptor Similarity. IAPRS 2010, 38, 109–114. [Google Scholar]
- Fleishman, S.; Drori, I.; Cohen-Or, D. Bilateral Mesh Denoising. In Proceedings of the ACM Transactions on Graphics (TOG); ACM: New York, NY, USA, 2003; Volume 22, pp. 950–953. [Google Scholar]
- Fan, H.; Yu, Y.; Peng, Q. Robust Feature-Preserving Mesh Denoising Based on Consistent Subneighborhoods. IEEE Trans. Vis. Comput. Graph. 2009, 16, 312–324. [Google Scholar]
- Nurunnabi, A.; West, G.; Belton, D. Outlier Detection and Robust Normal-Curvature Estimation in Mobile Laser Scanning 3D Point Cloud Data. Pattern Recognit. 2015, 48, 1404–1419. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Feng, H.-Y. Outlier Detection for Scanned Point Clouds Using Majority Voting. Comput.-Aided Des. 2015, 62, 31–43. [Google Scholar] [CrossRef]
- Bengio, Y. Deep Learning of Representations for Unsupervised and Transfer Learning. JMLR Workshop Conf. Proc. 2012, 27, 17–36. [Google Scholar]
- Lauzon, F.Q. An Introduction to Deep Learning. In Proceedings of the 2012 11th International Conference on Information Science, Signal Processing and their Applications (ISSPA), Montreal, QC, Canada, 2–5 July 2012; pp. 1438–1439. [Google Scholar]
- Zhang, L.; Zhang, L.; Du, B. Deep Learning for Remote Sensing Data: A Technical Tutorial on the State of the Art. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Cheng, G.; Yang, C.; Yao, X.; Guo, L.; Han, J. When Deep Learning Meets Metric Learning: Remote Sensing Image Scene Classification via Learning Discriminative CNNs. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2811–2821. [Google Scholar] [CrossRef]
- Ma, L.; Liu, Y.; Zhang, X.; Ye, Y.; Yin, G.; Johnson, B.A. Deep Learning in Remote Sensing Applications: A Meta-Analysis and Review. ISPRS J. Photogramm. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Petrovska, B.; Zdravevski, E.; Lameski, P.; Corizzo, R.; Štajduhar, I.; Lerga, J. Deep Learning for Feature Extraction in Remote Sensing: A Case-Study of Aerial Scene Classification. Sensors 2020, 20, 3906. [Google Scholar] [CrossRef]
- Boulch, A.; Marlet, R. Deep Learning for Robust Normal Estimation in Unstructured Point Clouds. Comput. Graph. Forum 2016, 35, 281–290. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Zhang, T.; Xia, T. Vehicle Detection from 3D Lidar Using Fully Convolutional Network. arXiv 2016, arXiv:1608.07916. [Google Scholar]
- Agresti, G.; Schaefer, H.; Sartor, P.; Zanuttigh, P. Unsupervised Domain Adaptation for ToF Data Denoising with Adversarial Learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 5584–5593. [Google Scholar]
- Agresti, G.; Minto, L.; Marin, G.; Zanuttigh, P. Deep Learning for Confidence Information in Stereo and Tof Data Fusion. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 697–705. [Google Scholar]
- Cheng, X.; Zhong, Y.; Dai, Y.; Ji, P.; Li, H. Noise-Aware Unsupervised Deep Lidar-Stereo Fusion. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 6339–6348. [Google Scholar]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. arXiv 2016, arXiv:1612.00593 [cs]. [Google Scholar]
- Garcia-Garcia, A.; Orts-Escolano, S.; Oprea, S.; Villena-Martinez, V.; Garcia-Rodriguez, J. A Review on Deep Learning Techniques Applied to Semantic Segmentation. arXiv 2017, arXiv:1704.06857. [Google Scholar]
- Jaderberg, M.; Simonyan, K.; Zisserman, A.; Kavukcuoglu, K. Spatial Transformer Networks. In Advances in Neural Information Processing Systems 28; Cortes, C., Lawrence, N.D., Lee, D.D., Sugiyama, M., Garnett, R., Eds.; Curran Associates, Inc.: Montreal, QC, Canada, 2015; pp. 2017–2025. [Google Scholar]
- Ge, L.; Cai, Y.; Weng, J.; Yuan, J. Hand Pointnet: 3d Hand Pose Estimation Using Point Sets. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 15–23 June 2018; pp. 8417–8426. [Google Scholar]
- Guerrero, P.; Kleiman, Y.; Ovsjanikov, M.; Mitra, N.J. PCPNet Learning Local Shape Properties from Raw Point Clouds. Comput. Graph. Forum 2018, 37, 75–85. [Google Scholar] [CrossRef] [Green Version]
- Rakotosaona, M.-J.; La Barbera, V.; Guerrero, P.; Mitra, N.J.; Ovsjanikov, M. POINTCLEANNET: Learning to Denoise and Remove Outliers from Dense Point Clouds. In Proceedings of the Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2019. [Google Scholar]
- Lobell, D.B.; Thau, D.; Seifert, C.; Engle, E.; Little, B. A Scalable Satellite-Based Crop Yield Mapper. Remote Sens. Environ. 2015, 164, 324–333. [Google Scholar] [CrossRef]
- Akinseye, F.M.; Adam, M.; Agele, S.O.; Hoffmann, M.P.; Traore, P.C.S.; Whitbread, A.M. Assessing Crop Model Improvements through Comparison of Sorghum (Sorghum bicolor L. Moench) Simulation Models: A Case Study of West African Varieties. Field Crop. Res. 2017, 201, 19–31. [Google Scholar] [CrossRef] [Green Version]
- Blancon, J.; Dutartre, D.; Tixier, M.-H.; Weiss, M.; Comar, A.; Praud, S.; Baret, F. A High-Throughput Model-Assisted Method for Phenotyping Maize Green Leaf Area Index Dynamics Using Unmanned Aerial Vehicle Imagery. Front. Plant Sci. 2019, 10, 685. [Google Scholar] [CrossRef] [PubMed]
- Fang, H.; Baret, F.; Plummer, S.; Schaepman-Strub, G. An Overview of Global Leaf Area Index (LAI): Methods, Products, Validation, and Applications. Rev. Geophys. 2019, 57, 739–799. [Google Scholar] [CrossRef]
- FARO Focus3D X 330. Available online: https://faro.app.box.com/s/8ilpeyxcuitnczqgsrgp5rx4a9lb3skq/file/441668110322 (accessed on 27 September 2020).
- Scharr, H.; Briese, C.; Embgenbroich, P.; Fischbach, A.; Fiorani, F.; Müller-Linow, M. Fast High Resolution Volume Carving for 3D Plant Shoot Reconstruction. Front. Plant Sci. 2017, 8, 1680. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gaillard, M.; Miao, C.; Schnable, J.C.; Benes, B. Voxel Carving Based 3D Reconstruction of Sorghum Identifies Genetic Determinants of Radiation Interception Efficiency. Plant Direct 2020, 4, e00255. [Google Scholar] [CrossRef] [PubMed]
- Velodyne VLP-Puck LITE. Available online: http://www.mapix.com/wp-content/uploads/2018/07/63-9286_Rev-H_Puck-LITE_Datasheet_Web.pdf (accessed on 1 November 2021).
- Velodyne VLP-32C. Available online: http://www.mapix.com/wp-content/uploads/2018/07/63-9378_Rev-D_ULTRA-Puck_VLP-32C_Datasheet_Web.pdf (accessed on 1 November 2021).
- Velodyne VLP-Puck Hi-Res. Available online: http://www.mapix.com/wp-content/uploads/2018/07/63-9318_Rev-E_Puck-Hi-Res_Datasheet_Web.pdf (accessed on 1 November 2021).
- Zhou, T.; Hasheminasab, S.M.; Habib, A. Tightly-Coupled Camera/LiDAR Integration for Point Cloud Generation from GNSS/INS-Assisted UAV Mapping Systems. ISPRS J. Photogramm. Remote Sens. 2021, 180, 336–356. [Google Scholar] [CrossRef]
- Ravi, R.; Habib, A. Fully Automated Profile-Based Calibration Strategy for Airborne and Terrestrial Mobile LiDAR Systems with Spinning Multi-Beam Laser Units. Remote Sens. 2020, 12, 401. [Google Scholar] [CrossRef] [Green Version]
- Richardson, J.J.; Moskal, L.M.; Kim, S.-H. Modeling Approaches to Estimate Effective Leaf Area Index from Aerial Discrete-Return LIDAR. Agric. For. Meteorol. 2009, 149, 1152–1160. [Google Scholar] [CrossRef]
- Pope, G.; Treitz, P. Leaf Area Index (LAI) Estimation in Boreal Mixedwood Forest of Ontario, Canada Using Light Detection and Ranging (LiDAR) and WorldView-2 Imagery. Remote Sens. 2013, 5, 5040–5063. [Google Scholar] [CrossRef] [Green Version]
- Nie, S.; Wang, C.; Dong, P.; Xi, X.; Luo, S.; Zhou, H. Estimating Leaf Area Index of Maize Using Airborne Discrete-Return LiDAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3259–3266. [Google Scholar] [CrossRef]
- Nazeri, B. Evaluation of Multi-Platform LiDAR-Based Leaf Area Index Estimates Over Row Crops. Ph.D. Thesis, Purdue University Graduate School, West Lafayette, IN, USA, 2021. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Farm | # of Plots | # of Varieties | Sowing Date | Harvest Date |
|---|---|---|---|---|
| SbDivTc_Cal | 160 | 80 | 13 May 2020 | 15 August 2020 |
| HIPS | 88 | 44 | 12 May 2020 | 1 October 2020 |
| Platform | Sensor | Unit | Description |
|---|---|---|---|
| UAV-1 | |||
| RGB camera | 1 | 36.4 MP Sony Alpha 7R (ILCE-7R) | |
| LiDAR sensor | 1 | Velodyne VLP 16-Puck Lite-range accuracy of ±3 cm | |
| GNSS/INS | 1 | Trimble APX-15 v2 | |
| Hyperspectral camera | 1 | Nano Hyperspectral (VNIR) | |
| UAV-2 | |||
| RGB camera | 1 | 36.4 MP Sony Alpha 7R (ILCE-7R) | |
| LiDAR sensor | 1 | Velodyne VLP 32-range accuracy of ±3 cm | |
| GNSS/INS | 1 | Trimble APX-15 v2 | |
| PhenoRover | |||
| RGB camera | 2 | 9.1 MP FLIR Grasshopper3 GigE | |
| Hyperspectral camera | 1 | Headwall Machine | |
| LiDAR sensors | 1 | Velodyne VLP-Puck Hi-Res | |
| GNSS/INS | 1 | Applanix POS-LV 125 | |
| Experiment | Platform | Flying Height | Sowing Date | LiDAR Data Collection Date | DAS 1 | Ground Reference Date | DAS 2 |
|---|---|---|---|---|---|---|---|
| Maize | PhenoRover | N/A | 05/12/2020 | 06/26/2020 | 45 | 06/29/2020 | 48 |
| UAV-2 | 20 m | 07/07/2020 | 56 | 07/06/2020 | 55 | ||
| UAV-1 | 20 m | 07/11/2020 | 60 | 07/13/2020 | 62 | ||
| UAV-2 | 20 m | 07/11/2020 | 60 | 07/13/2020 | 62 | ||
| UAV-2 | 20 m | 07/13/2020 | 62 | 07/13/2020 | 62 | ||
| PhenoRover | N/A | 07/13/2020 | 62 | 07/13/2020 | 62 | ||
| Sorghum | PhenoRover | N/A | 05/13/2020 | 06/26/2020 | 44 | 06/29/2020 | 47 |
| UAV-2 | 20 m | 07/07/2020 | 55 | 07/06/2020 | 54 | ||
| UAV-2 | 20 m | 07/13/2020 | 61 | 07/13/2020 | 61 | ||
| PhenoRover | N/A | 07/20/2020 | 68 | 07/20/2020 | 68 | ||
| UAV-2 | 20 m | 07/20/2020 | 68 | 07/20/2020 | 68 | ||
| PhenoRover | N/A | 07/24/2020 | 72 | 07/27/2020 | 75 | ||
| UAV-2 | 20 m | 07/28/2020 | 76 | 07/27/2020 | 75 |
| Date | Platform | Flying Height | DAS | Point Density (Points/m2) |
|---|---|---|---|---|
| 11 July 2020 | UAV-1 | 20 m | 60 | 244 |
| 11 July 2020 | UAV-2 | 20 m | 60 | 617 |
| 13 July 2020 | PhenoRover | N/A | 62 | 1500 |
| Date | Platform | Platform Height | DAS | Point Density (Points/m2) |
|---|---|---|---|---|
| 20 July 2020 | UAV-2 | 20 m | 68 | 500 |
| 20 July 2020 | PhenoRover | N/A | 68 | 1400 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nazeri, B.; Crawford, M. Detection of Outliers in LiDAR Data Acquired by Multiple Platforms over Sorghum and Maize. Remote Sens. 2021, 13, 4445. https://doi.org/10.3390/rs13214445
Nazeri B, Crawford M. Detection of Outliers in LiDAR Data Acquired by Multiple Platforms over Sorghum and Maize. Remote Sensing. 2021; 13(21):4445. https://doi.org/10.3390/rs13214445
Chicago/Turabian StyleNazeri, Behrokh, and Melba Crawford. 2021. "Detection of Outliers in LiDAR Data Acquired by Multiple Platforms over Sorghum and Maize" Remote Sensing 13, no. 21: 4445. https://doi.org/10.3390/rs13214445
APA StyleNazeri, B., & Crawford, M. (2021). Detection of Outliers in LiDAR Data Acquired by Multiple Platforms over Sorghum and Maize. Remote Sensing, 13(21), 4445. https://doi.org/10.3390/rs13214445