
Landsat 8 Data as a Source of High Resolution Sea Surface Temperature Maps in the Baltic Sea

Abstract
:1. Introduction
2. Materials and Methods
2.1. Data
2.2. NLSST Formula
2.3. Cloud and Ice Masking
2.4. SST Algorithm Calibration
3. Results
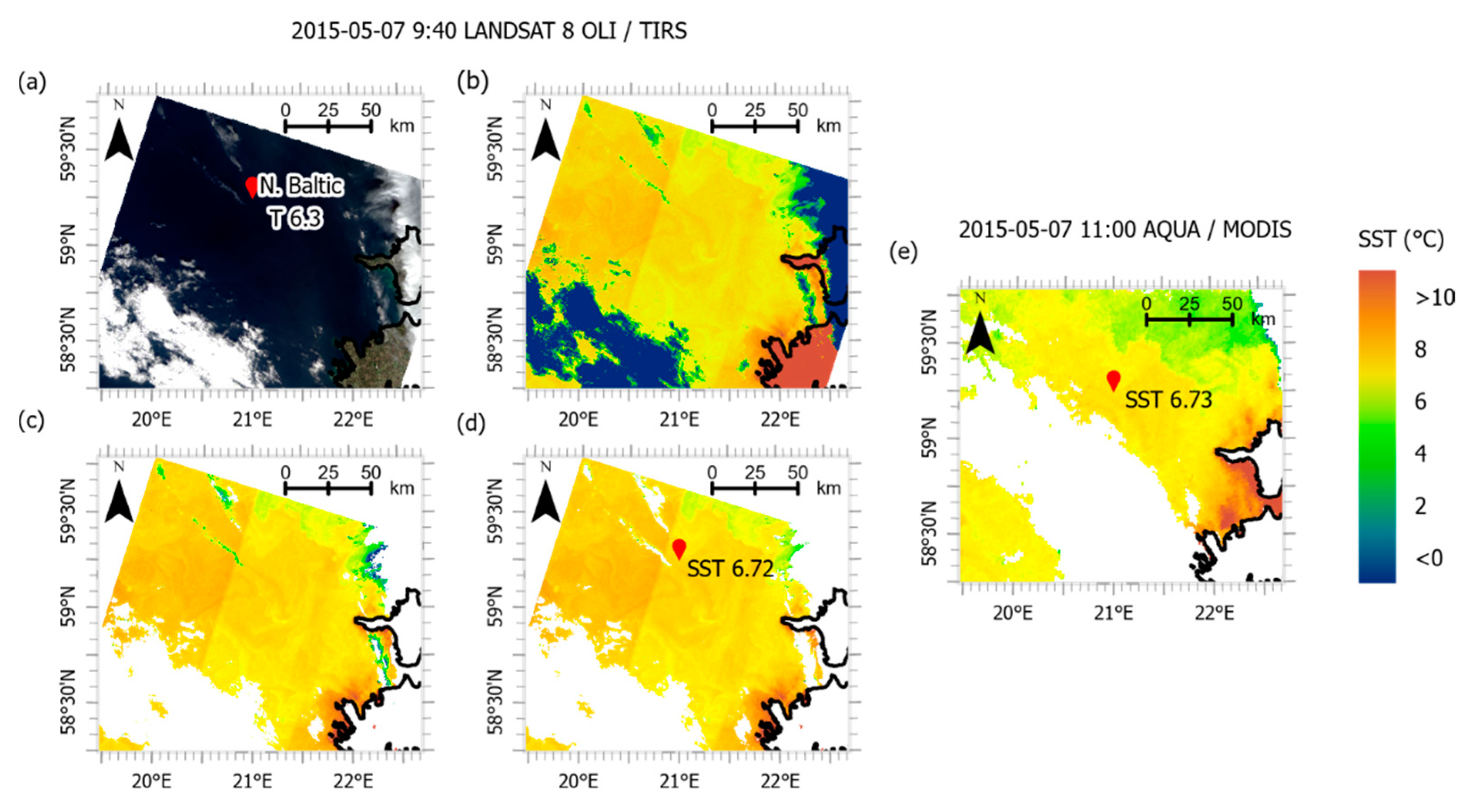
3.1. Improvement of Contaminated Pixel Masking
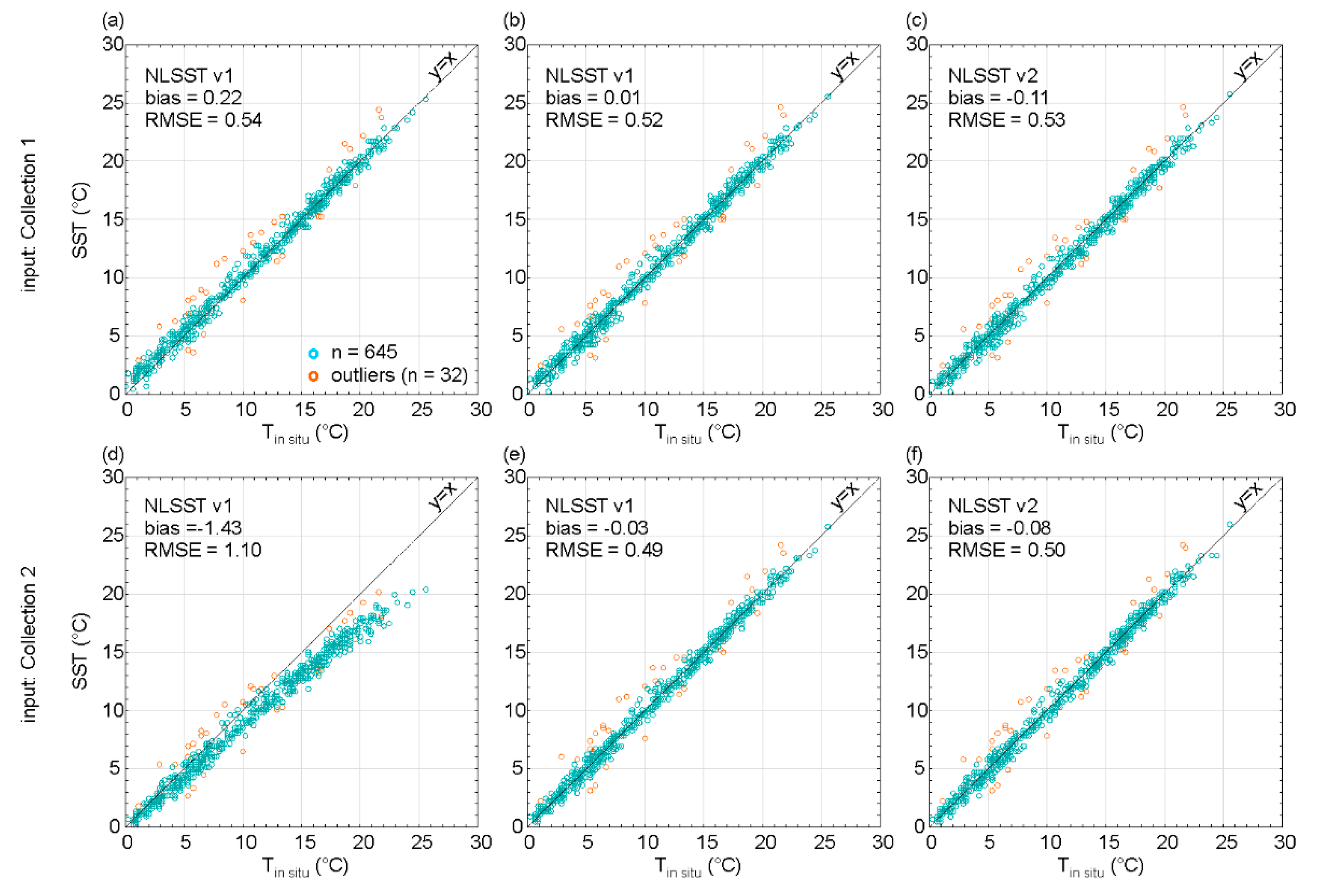
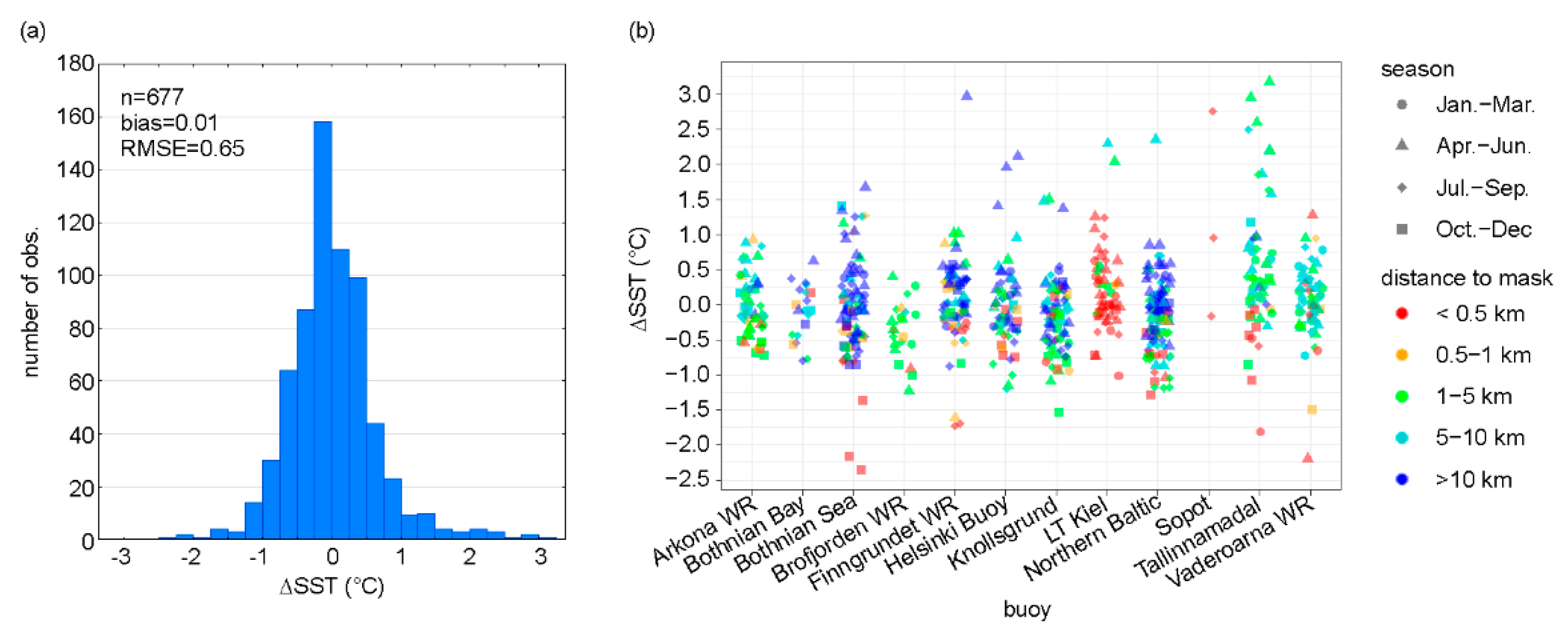
3.2. Calibration of the SST Equations
4. Summary and Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Høyer, J.L.; Karagali, I. Sea Surface Temperature Climate Data Record for the North Sea and Baltic Sea. J. Clim. 2016, 29, 2529–2541. [Google Scholar] [CrossRef]
- Leppäranta, M.; Myrberg, K. Physical Oceanography of the Baltic Sea; Series in Geophysical Sciences; Springer: Chichester, UK, 2009; ISBN 978-3-540-79702-9. [Google Scholar]
- Kniebusch, M.; Meier, H.E.M.; Neumann, T.; Börgel, F. Temperature Variability of the Baltic Sea since 1850 and Attribution to Atmospheric Forcing Variables. J. Geophys. Res. Ocean. 2019, 124, 4168–4187. [Google Scholar] [CrossRef]
- Stramska, M.; Białogrodzka, J. Spatial and Temporal Variability of Sea Surface Temperature in the Baltic Sea Based on 32-Years (1982–2013) of Satellite Data. Oceanologia 2015, 57, 223–235. [Google Scholar] [CrossRef] [Green Version]
- Gurova, E.; Chubarenko, B. Remote-Sensing Observations of Coastal Sub-Mesoscale Eddies in the South-Eastern Baltic. Oceanologia 2012, 54, 631–654. [Google Scholar] [CrossRef] [Green Version]
- Lehmann, A.; Myrberg, K.; Höflich, K. A Statistical Approach to Coastal Upwelling in the Baltic Sea Based on the Analysis of Satellite Data for 1990–2009. Oceanologia 2012, 54, 369–393. [Google Scholar] [CrossRef] [Green Version]
- O’Carroll, A.G.; Armstrong, E.M.; Beggs, H.M.; Bouali, M.; Casey, K.S.; Corlett, G.K.; Dash, P.; Donlon, C.J.; Gentemann, C.L.; Høyer, J.L.; et al. Observational Needs of Sea Surface Temperature. Front. Mar. Sci. 2019, 6, 420. [Google Scholar] [CrossRef]
- Kahru, M.; Elmgren, R.; Kaiser, J.; Wasmund, N.; Savchuk, O. Cyanobacterial Blooms in the Baltic Sea: Correlations with Environmental Factors. Harmful Algae 2020, 92, 101739. [Google Scholar] [CrossRef]
- Kahru, M.; Leppánen, J.-M.; Rud, O. Cyanobacterial Blooms Cause Heating of the Sea Surface. Mar. Ecol. Prog. Ser. 1993, 101, 1–7. [Google Scholar] [CrossRef]
- Morel, A.; Antoine, D. Heating Rate within the Upper Ocean in Relation to Its Bio-Optical State. J. Phys. Geogr. 1994, 24, 1652–1655. [Google Scholar] [CrossRef] [Green Version]
- Matciak, M.; Wojtasiewicz, B. Field Investigation on Seawater Temperature Variability in Relation to Horizontal Optical Gradient. J. Mar. Res. 2007, 65, 737–757. [Google Scholar] [CrossRef]
- Konik, M. Remote Sensing of Cyanobacteria Blooms and Their Influence on the Remotely Sensed Physical Properties of the Water in the Baltic Sea. Ph.D. Thesis, Institute of Oceanology of the Polish Academy of Sciences, Sopot, Poland, 2021. [Google Scholar]
- Konik, M.; Kowalewski, M.; Bradtke, K.; Darecki, M. The Operational Method of Filling Information Gaps in Satellite Imagery Using Numerical Models. Int. J. Appl. Earth Obs. Geoinf. 2019, 75, 68–82. [Google Scholar] [CrossRef]
- Minnett, P.J.; Alvera-Azcárate, A.; Chin, T.M.; Corlett, G.K.; Gentemann, C.L.; Karagali, I.; Li, X.; Marsouin, A.; Marullo, S.; Maturi, E.; et al. Half a Century of Satellite Remote Sensing of Sea-Surface Temperature. Remote Sens. Environ. 2019, 233, 111366. [Google Scholar] [CrossRef]
- Karagali, I.; Høyer, J.; Hasager, C. SST Diurnal Variability in the North Sea and the Baltic Sea. Remote Sens. Environ. 2012, 121, 159–170. [Google Scholar] [CrossRef]
- Kozlov, I.; Dailidienė, I.; Korosov, A.; Klemas, V.; Mingėlaitė, T.T. MODIS-Based Sea Surface Temperature of the Baltic Sea Curonian Lagoon. J. Mar. Syst. 2014, 129, 157–165. [Google Scholar] [CrossRef]
- Losa, S.N.; Danilov, S.; Schröter, J.; Nerger, L.; Maβmann, S.; Jenssen, F. Assimilating NOAA SST Data into the BSH Operational Circulation Model for the North and Baltic Seas: Inference about the Data. J. Mar. Syst. 2012, 105–108, 152–162. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Fu, W. Assimilating High-Resolution Sea Surface Temperature Data Improves the Ocean Forecast Potential in the Baltic Sea. Ocean Sci. 2018, 14, 525–541. [Google Scholar] [CrossRef] [Green Version]
- Woźniak, B.; Krężel, A.; Darecki, M.; Woźniak, S.B.; Majchrowski, R.; Ostrowska, M.; Kozłowski, Ł.; Ficek, D.; Olszewski, J.; Dera, J. Algorithm for the Remote Sensing of the Baltic Ekosystem (DESAMBEM), Part 1: Mathematical Apparatus. Oceanologia 2008, 50, 451–508. [Google Scholar]
- Høyer, J.L.; She, J. Optimal Interpolation of Sea Surface Temperature for the North Sea and Baltic Sea. J. Mar. Syst. 2007, 65, 176–189. [Google Scholar] [CrossRef]
- Li, J.; Chen, B. Global Revisit Interval Analysis of Landsat-8-9 and Sentinel-2A-2B Data for Terrestrial Monitoring. Sensors 2020, 20, 6631. [Google Scholar] [CrossRef]
- Landsat 8 (L8) Data Users Handbook; LSDS-1574 v.5.0; Department of the Interior U.S. Geological Survey, EROS: Sioux Falls, SD, USA, 2019. Available online: https://www.usgs.gov/media/files/landsat-8-data-users-handbook (accessed on 1 September 2021).
- Kuroda, H.; Toya, Y. High-Resolution Sea Surface Temperatures Derived from Landsat 8: A Study of Submesoscale Frontal Structures on the Pacific Shelf off the Hokkaido Coast, Japan. Remote Sens. 2020, 12, 3326. [Google Scholar] [CrossRef]
- Brando, V.E.; Braga, F.; Zaggia, L.; Giardino, C.; Bresciani, M.; Matta, E.; Bellafiore, D.; Ferrarin, C.; Maicu, F.; Benetazzo, A.; et al. High-Resolution Satellite Turbidity and Sea Surface Temperature Observations of River Plume Interactions during a Significant Flood Event. Ocean Sci. 2015, 11, 909–920. [Google Scholar] [CrossRef] [Green Version]
- Xing, Q.; Braga, F.; Tosi, L.; Lou, M.; Zaggia, L.; Teatini, P.; Gao, X.; Yu, L.; Wen, X.; Shi, P. Detection of Low Salinity Groundwater Seeping into the Eastern Laizhou Bay (China) with the Aid of Landsat Thermal Data. J. Coast. Res. 2016, 74, 149–156. [Google Scholar] [CrossRef]
- Trinh, R.C.; Fichot, C.G.; Gierach, M.M.; Holt, B.; Malakar, N.K.; Hulley, G.; Smith, J. Application of Landsat 8 for Monitoring Impacts of Wastewater Discharge on Coastal Water Quality. Front. Mar. Sci. 2017, 4, 329. [Google Scholar] [CrossRef] [Green Version]
- Savari, A.; Dehmordi, L.M.; Dostshenas, A.; Asgari, H.M.; Abasi, A. Assessment of Chlorophyll-a, SST and Diffuse Attenuation Coefficient (Kd490) in Northwest of Persian Gulf Using Landsat 8 Satellite Data. Int. J. Sci. 2016, 5, 10–26. [Google Scholar] [CrossRef] [Green Version]
- Snyder, J.; Boss, E.; Weatherbee, R.; Thomas, A.C.; Brady, D.; Newell, C. Oyster Aquaculture Site Selection Using Landsat 8-Derived Sea Surface Temperature, Turbidity, and Chlorophyll a. Front. Mar. Sci 2017, 4, 190. [Google Scholar] [CrossRef] [Green Version]
- Cahyono, A.B.; Saptarini, D.; Pribadi, C.B.; Armono, H.D. Estimation of Sea Surface Temperature (SST) Using Split Window Methods for Monitoring Industrial Activity in Coastal Area. Appl. Mech. Mater. 2017, 862, 90–95. [Google Scholar] [CrossRef]
- She, J.; Meier, H.E.M.; Darecki, M.; Gorringe, P.; Huess, V.; Kouts, T.; Reissmann, J.H.; Tuomi, L. Baltic Sea Operational Oceanography—A Stimulant for Regional Earth System Research. Front. Earth Sci. 2020, 8, 7. [Google Scholar] [CrossRef]
- Syariz, M.A.; Jaelani, L.M.; Subehi, L.; Pamungkas, A.; Koenhardono, E.S.; Sulisetyono, A. Retrieval of Sea Surface Temperature over Poteran Island Water of Indonesia with Landsat 8 TIRS Image: A Preliminary Algorithm; The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences: Kuala Lumpur, Malaysia, 2015; Volume XL-2/W4, pp. 87–90. [Google Scholar]
- Susilo, E.; Hanintyo, R.; Wijaya, A. Retrieving Coastal Sea Surface Temperature from Landsat-8 TIRS for Wangi-Wangi Island, Wakatobi, Southeast Sulawesi, Indonesia. Int. J. Remote Sens. Earth Sci. 2019, 16, 13–22. [Google Scholar] [CrossRef]
- Vanhellemont, Q. Automated Water Surface Temperature Retrieval from Landsat 8/TIRS. Remote Sens. Environ. 2020, 237, 111518. [Google Scholar] [CrossRef]
- Barsi, J.A.; Schott, J.R.; Hook, S.J.; Raqueno, N.G.; Markham, B.L.; Radocinski, R.G. Landsat-8 Thermal Infrared Sensor (TIRS) Vicarious Radiometric Calibration. Remote Sens. 2014, 6, 11607–11626. [Google Scholar] [CrossRef] [Green Version]
- Gerace, A.; Montanaro, M. Derivation and Validation of the Stray Light Correction Algorithm for the Thermal Infrared Sensor Onboard Landsat 8. Remote Sens. Environ. 2017, 191, 246–257. [Google Scholar] [CrossRef]
- Jang, J.-C.; Park, K.-A. High-Resolution Sea Surface Temperature Retrieval from Landsat 8 OLI/TIRS Data at Coastal Regions. Remote Sens. 2019, 11, 2687. [Google Scholar] [CrossRef] [Green Version]
- Bayat, F.; Hasanlou, M. Feasibility Study of Landsat-8 Imagery for Retrieving Sea Surface Temperature (Case Study Persian Gulf); The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences: Prague, Czech Republic, 2016; Volume XLI-B8, pp. 1107–1110. [Google Scholar]
- Walton, C.C.; Pichel, W.G.; Sapper, F.; May, D.A. The Development and Operational Application of Nonlinear Algorithms for the Measurement of Sea Surface Temperatures with the NOAA Polar-Orbiting Environmental Satellites. J. Geophys. Res. 1998, 103, 27999–28012. [Google Scholar] [CrossRef]
- Appendix, G. (Ed.) NOAA KLM User’s Guide with NOAA-N, N Prime, and MetOp Supplements; U.S. Department of Commerce, National Oceanic and Atmospheric Administration, National Environmental Satellite, Data, and Information Service, National Climatic Data Center, Climate Services Division, Satellite Services Branch: Asheville, NC, USA, 2014.
- Kilpatrick, K.; Podestá, G.; Evans, R. Overview of the NOAA/NASA Pathfinder Version 4.2 Algorithm for Sea Surface Temperature and Associated Matchup Database. J. Geophys. Res. 2001, 106, 9179–9197. [Google Scholar] [CrossRef]
- Emery, W.J.; Yu, Y.; Wick, G.A.; Schlüssel, P.; Reynolds, R.W. Correcting Infrared Satellite Estimates of Sea Surface Temperature for Atmospheric Water Vapor Attenuation. J. Geophys. Res. 1994, 99, 5219–5236. [Google Scholar] [CrossRef]
- U.S. Geological Survey Landsat Collection 2 (Version 1.1, 15 January, 2021); U.S. Geological Survey Fact Sheet 2021-3002; U.S. Geological Survey: Washington, DC, USA, 2021; 4p. [CrossRef]
- Copernicus Marine In Situ TAC. Copernicus Marine In Situ TAC Quality Information Document for Near Real Time In Situ Products (QUID and SQO). V2.1; Copernicus Marine In Situ TAC: 2021. Available online: https://archimer.ifremer.fr/doc/00646/75807/ (accessed on 1 March 2021). [CrossRef]
- Liu, H.; Shah, S.; Jiang, W. On-Line Outlier Detection and Data Cleaning. Comput. Chem. Eng. 2004, 28, 1635–1647. [Google Scholar] [CrossRef]
- Landsat 8 Operational Land Imager (OLI)—Thermal Infrared Sensor (TIRS) Solar and View Angle Generation Algorithm de-Scription Document (Add). LSDS-1928 v.2.0. 2018. Available online: https://www.usgs.gov/media/files/lsds-1928-landsat-8-olitirs-solar-view-angle-generation-add (accessed on 1 September 2021).
- Zhu, Z.; Wang, S.; Woodcock, C.E. Improvement and Expansion of TheFmask Algorithm: Cloud, Cloud Shadow, and Snow Detection for Landsats 4–7,8, and Sentinel 2 Images. Remote Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Landsat 8–9 Operational Land Imager (OLI)—Thermal Infrared Sensor (TIRS) Collection 2 Level 1 (L1) Data Format Control Book (DFCB). LSDS-1822 Version 6.0. 2020. Available online: https://www.usgs.gov/media/files/landsat-8-9-olitirs-collection-2-level-1-data-format-control-book (accessed on 1 September 2021).
- Mahajan, S.; Fataniya, B. Cloud Detection Methodologies: Variants and Development—A Review. Complex Intell. Syst. 2020, 6, 251–261. [Google Scholar] [CrossRef] [Green Version]
- Minnett, P.J. Radiometric Measurements of the Sea-Surface Skin Temperature: The Competing Roles of the Diurnal Thermocline and the Cool Skin. Int. J. Remote Sens. 2003, 24, 5033–5047. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Type | Position | Sampling Interval (h) | Depth (m) Measurement/Bottom * | Number of Matchups All/Clear |
|---|---|---|---|---|---|
| Arkona WR | wave buoy | 13.87°E 54.88°N | 1 | 0.5/45 | 83/55 |
| Bothnian Bay | wave buoy | 23.24°E 64.68°N | 0.5 | 0.5/75 | 29/20 |
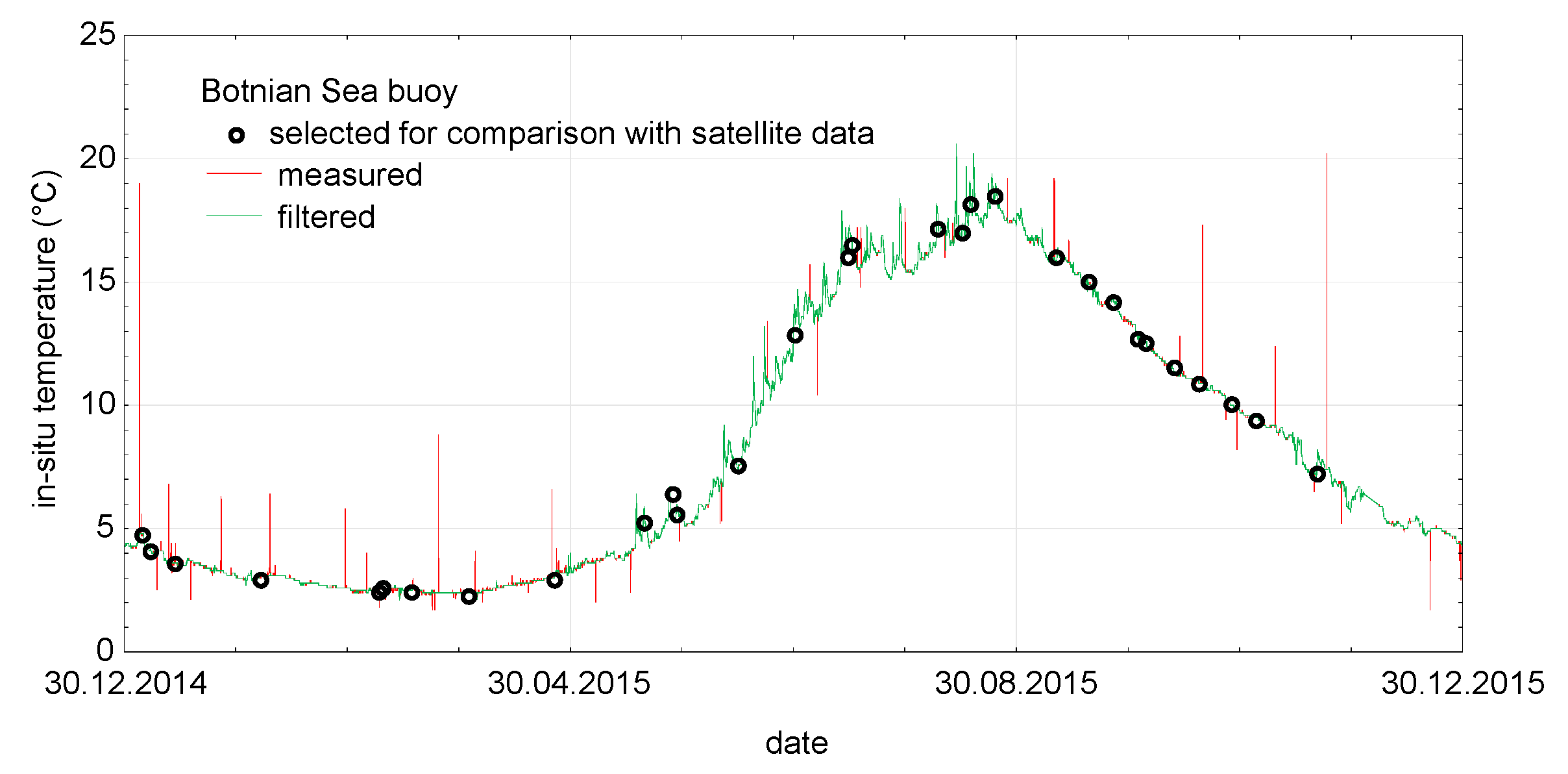
| Bothnian Sea | wave buoy | 20.23°E 61.80°N | 0.5 | 0.5/110 | 161/91 |
| Brofjorden WR | wave buoy | 11.22°E 58.25°N | 0.5 | 0.5/55 | 40/22 |
| Fingrundet WR | wave buoy | 18.61°E 60.9°N | 0.5 | 0.5/68 | 131/76 |
| Helsinki Buoy | wave buoy | 25.24°E 59.97°N | 0.5 | 0.5/50 | 97/57 |
| Knollsgrund | wave buoy | 17.62°E 57.52°N | 1 | 0.5/95 | 126/80 |
| LT Kiel | fixed platform | 10.27°E 54.50°N | 1 | 0.5/13 | 99/54 |
| Northern Baltic | wave buoy | 21.00°E 59.25°N | 0.5 | 0.5/95 | 173/100 |
| Sopot | fixed platform | 18.58°E 54.45°N | 1 | subsurface/8 | 42/3 |
| Tallinnamadal | fixed platform | 24.73°E 59.71°N | 1 | subsurface/10 | 140/59 |
| Vaderoarna | wave buoy | 10.93°E 58.50°N | 0.5 | 0.5/70 | 92/63 |
| Coefficient | Input Data: Collection 1 | Input Data: Collection 2 | ||||||
|---|---|---|---|---|---|---|---|---|
| Estimate | Std. Error | p-Value | R | Estimate | Std. Error | p-Value | R | |
| NLSST v1 (full): SST = a1T11 + a2(T11 − T12)MCSST + a3(T11 − T12)(secθsat − 1) + a4, MCSST = b1T11 + b2(T11 − T12) + b3(T11 − T12)(secθsat − 1) + b4 | ||||||||
| a1 | 0.922 | 0.009 | 0.000 | 0.996 | 0.939 | 0.006 | 0.000 | 0.997 |
| a2 | 0.086 | 0.004 | 0.000 | 0.092 | 0.005 | 0.000 | ||
| a3 | 18.915 | 7.474 | 0.009 | 36.554 | 10.406 | 0.000 | ||
| a4 | −250.829 | 2.391 | 0.000 | −254.753 | 1.759 | 0.000 | ||
| b1 | 0.998 | 0.006 | 0.000 | 0.996 | 0.990 | 0.005 | 0.000 | 0.996 |
| b2 | 1.348 | 0.064 | 0.000 | 1.291 | 0.071 | 0.000 | ||
| b3 | 12.399 | 7.447 | 0.097 | 18.525 | 11.541 | 0.109 | ||
| b4 | −272.468 | 1.578 | 0.000 | −268.961 | 1.411 | 0.000 | ||
| NLSST v2 (simplified): SST = a1T11 + a2(T11 − T12)MCSST + a3, MCSST = b1T11 + b2(T11 − T12) + b3 | ||||||||
| a1 | 0.920 | 0.009 | 0.000 | 0.996 | 0.937 | 0.006 | 0.000 | 0.997 |
| a2 | 0.090 | 0.004 | 0.000 | 0.101 | 0.004 | 0.000 | ||
| a3 | −250.369 | 2.389 | 0.000 | −254.220 | 1.779 | 0.000 | ||
| b1 | 0.999 | 0.006 | 0.000 | 0.996 | 0.990 | 0.005 | 0.000 | 0.996 |
| b2 | 1.387 | 0.059 | 0.000 | 1.355 | 0.059 | 0.000 | ||
| b3 | −272.647 | 1.577 | 0.000 | −269.117 | 1.410 | 0.000 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bradtke, K. Landsat 8 Data as a Source of High Resolution Sea Surface Temperature Maps in the Baltic Sea. Remote Sens. 2021, 13, 4619. https://doi.org/10.3390/rs13224619
Bradtke K. Landsat 8 Data as a Source of High Resolution Sea Surface Temperature Maps in the Baltic Sea. Remote Sensing. 2021; 13(22):4619. https://doi.org/10.3390/rs13224619
Chicago/Turabian StyleBradtke, Katarzyna. 2021. "Landsat 8 Data as a Source of High Resolution Sea Surface Temperature Maps in the Baltic Sea" Remote Sensing 13, no. 22: 4619. https://doi.org/10.3390/rs13224619
APA StyleBradtke, K. (2021). Landsat 8 Data as a Source of High Resolution Sea Surface Temperature Maps in the Baltic Sea. Remote Sensing, 13(22), 4619. https://doi.org/10.3390/rs13224619