
Landsat and Sentinel-2 Based Burned Area Mapping Tools in Google Earth Engine



Abstract
:
1. Introduction
2. BAMT Tools
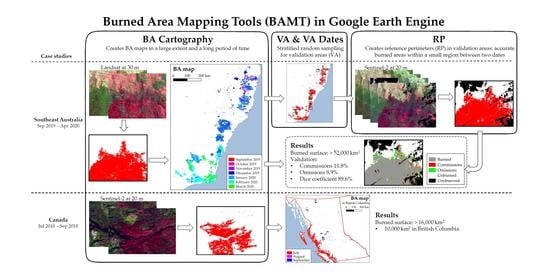
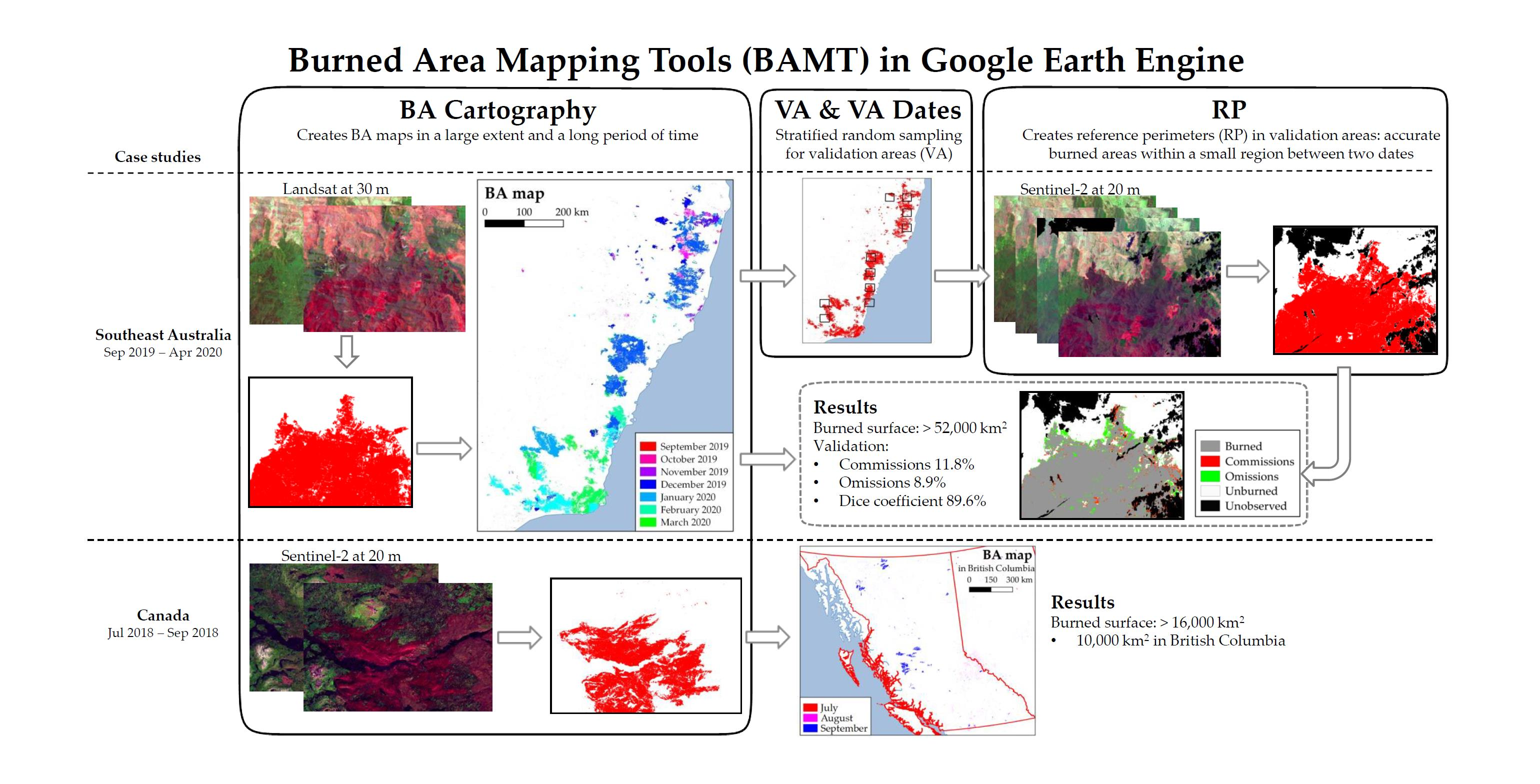
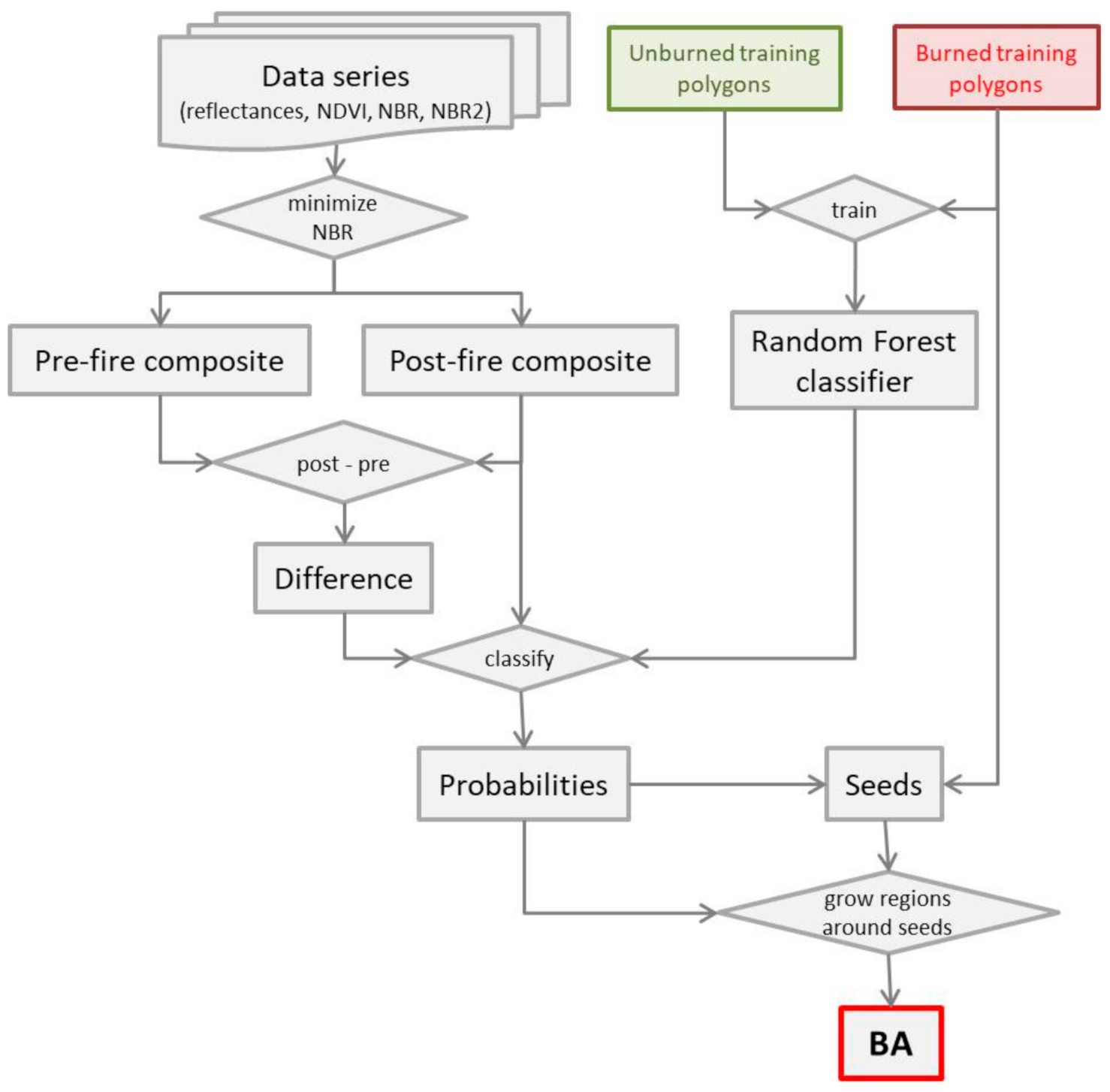
- BA Cartography: The user can create a BA product over a large region and a long period of time, from changes between two temporal images via a supervised classification.
- VA: for validation area (VA) selection based on several strata, in accordance with an existing stratified random sampling methodology.
- VA Dates: This tool serves as a bridge between VA and RP tools, providing the user with information about which dates to use to generate RP, after having sampled the best validation areas, i.e., identifying cloud-free dates.
- RP: creates accurate burned areas within a small region, from changes between two dates via a supervised classification. It is mostly oriented towards generating reference perimeters (RPs) for a BA product’s assessment.
2.1. Datasets and Preprocessing
2.2. BA Cartography Tool
2.3. VA Tool
- Sentinel-2 data were incorporated into the analysis, as these offer better spatial and temporal resolutions than Landsat data and should improve reference data created for the BA validation. The user may thus choose between S2 or Landsat data (with the ‘dataset’ parameter).
- Landsat or S2 scene extents are considered as sampling units instead of TSAs. Despite using whole TSAs when applying the stratified random sampling methodology, most studies have only created reference data in a central window of about 20–30 km wide and high [6,14,16,37], which the fire activity cover value used in the analysis might not properly represent. Therefore, the user can define the dimension of a square window (‘dimension’ parameter), located at the center of the scene, so that the analysis may be carried out in that specific window.
- Either the MCD64A1 [5] or the FireCCI51 [6] can be used to estimate global fire activity to select the samples (‘globalBA’ parameter). Both products are available in GEE. The latter has a higher spatial resolution (250 m), but was only processed between January 2001 and December 2019, while the MCD64A1 at 500 m has been systematically processed from November 2000 up to the present.
- Optionally, several criteria of data availability are considered when creating long sampling units: minimum length of the unit in days, minimum frequency of available images in days and maximum cloud cover in each available image (‘minLength’, ‘minFreq’ and ‘maxCloud’ parameters, respectively).
2.4. VA Dates Tool
2.5. RP Tool
- Spatially, BA detection is limited to a window located at the center of a Landsat or Sentinel-2 scene. The user defines the width and height of the window (‘region_dimension’ parameter).
- Temporally, two single scenes are used for BA detection instead of temporal composites, defined by two dates. The VA Dates tool can be used to identify the dates with available images.
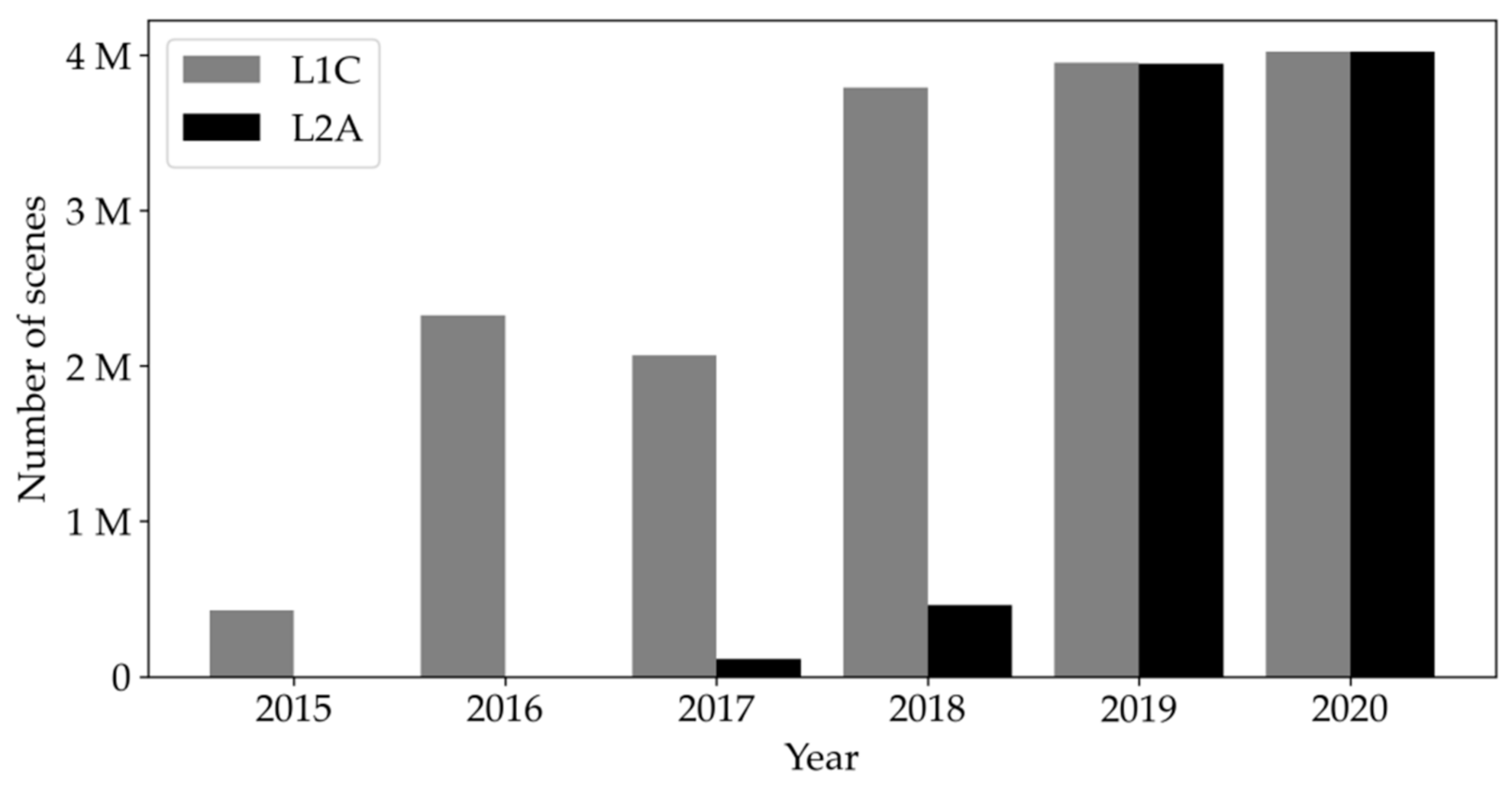
- For Sentinel-2 derived RP, the SCL image is selected to mask clouds and cloud shadows due to its higher accuracy, if an L2A scene is available on the corresponding date; if there is no L2A scene, QA60 and B1 bands are used. L1C TOA reflectance is used to map BA in both cases.
- A more permissive probability threshold defines the burned seeds because the region of interest is smaller and both burned and unburned areas have greater homogeneity across the image. Instead of the average of mean probabilities used in the BA Cartography tool, the minimum among mean probabilities in each burned training polygon is used as the threshold.
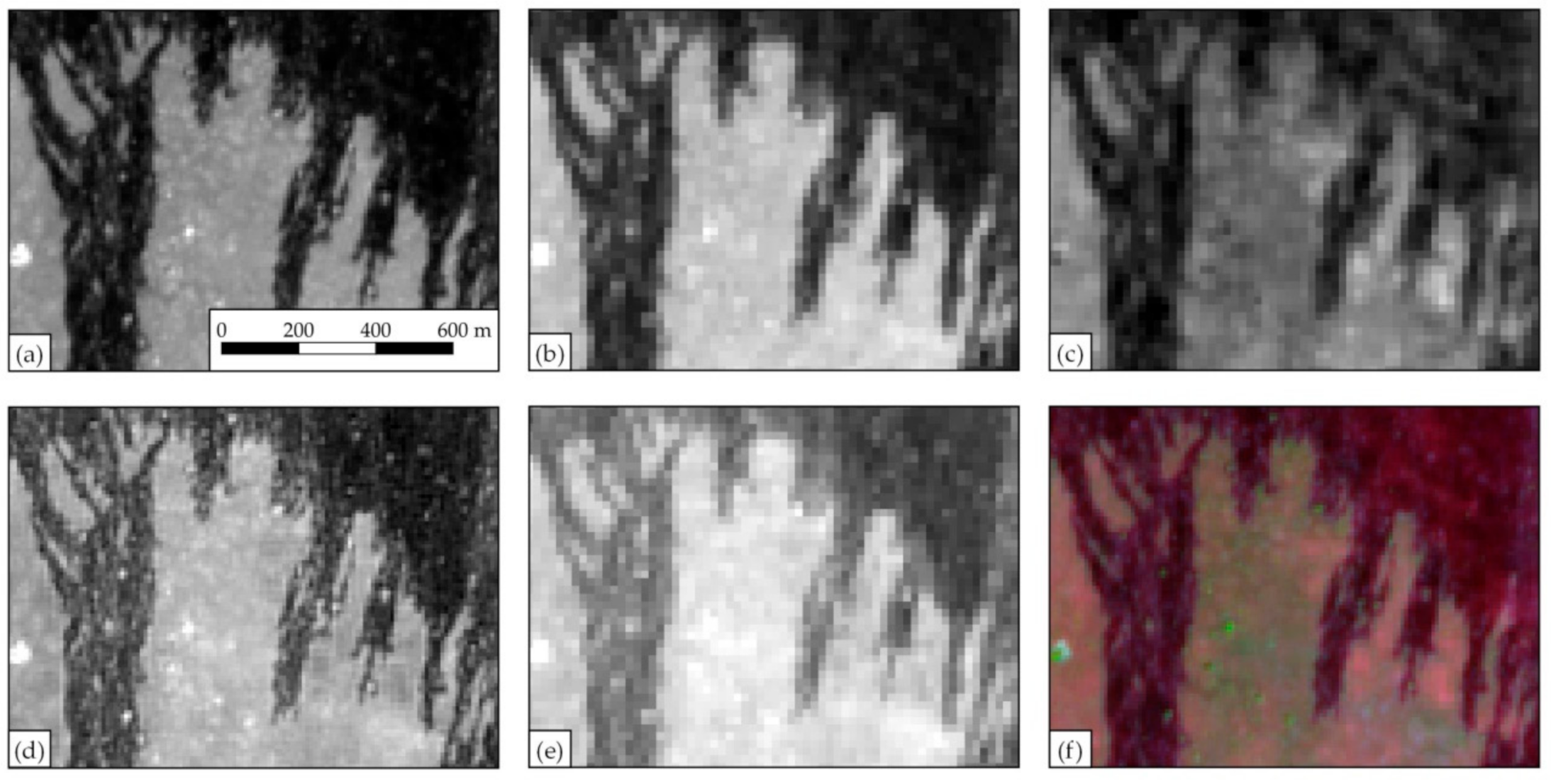
- RP from Landsat data are obtained at 30 m, but Sentinel-2 based RP can be obtained at both 20 and 10 m (depending on the ‘resolution’ parameter). If a 10 m output resolution is selected, the B8 band is used instead of B8A (at 20 m) in the NIR region, and this is joined to the visible bands at 10 m (blue, red and green) and both SWIR bands at 20 m. If the 20 m output resolution is selected, the B8A is used as the NIR band. Figure 5 shows how bands at different resolution can be combined, where the NBR index at 10 m is significantly more accurate than the same index at 20 m, despite both indices deriving from the same SWIR band at 20 m.
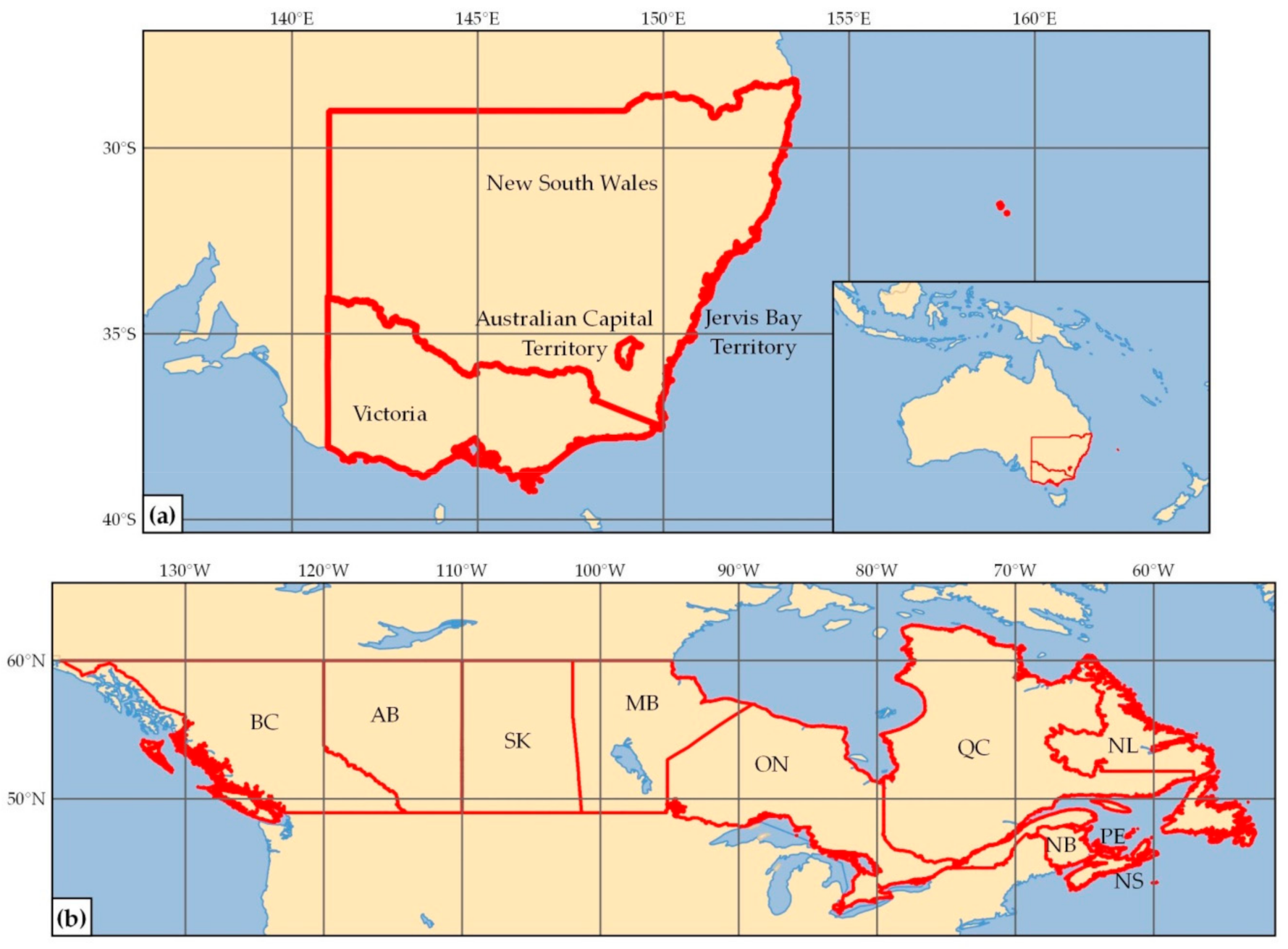
2.6. Case Studies in Southeast Australia and Canada
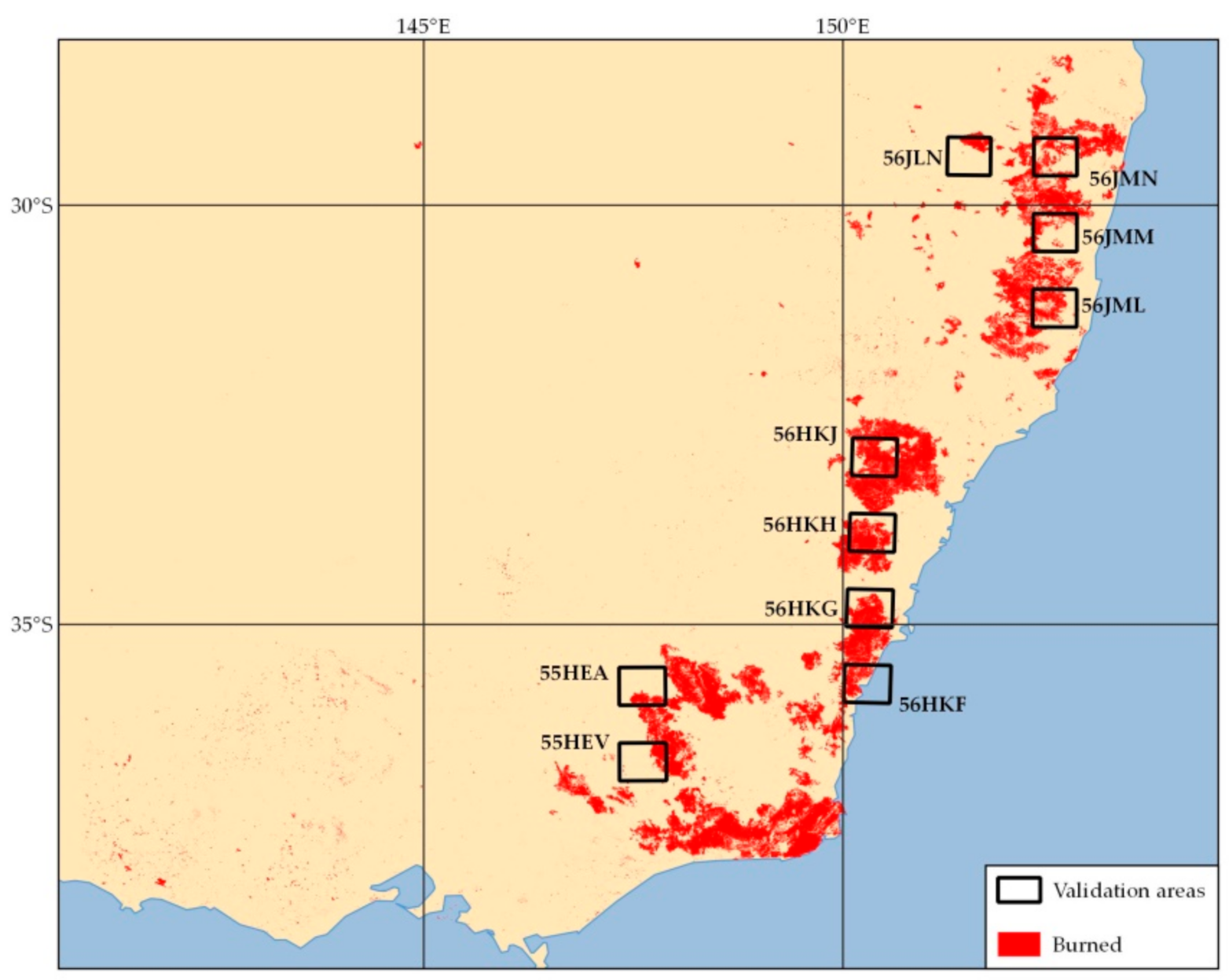
2.6.1. Southeast Australia
2.6.2. Canada
3. Results
3.1. Southeast Australia
3.1.1. BA Cartography
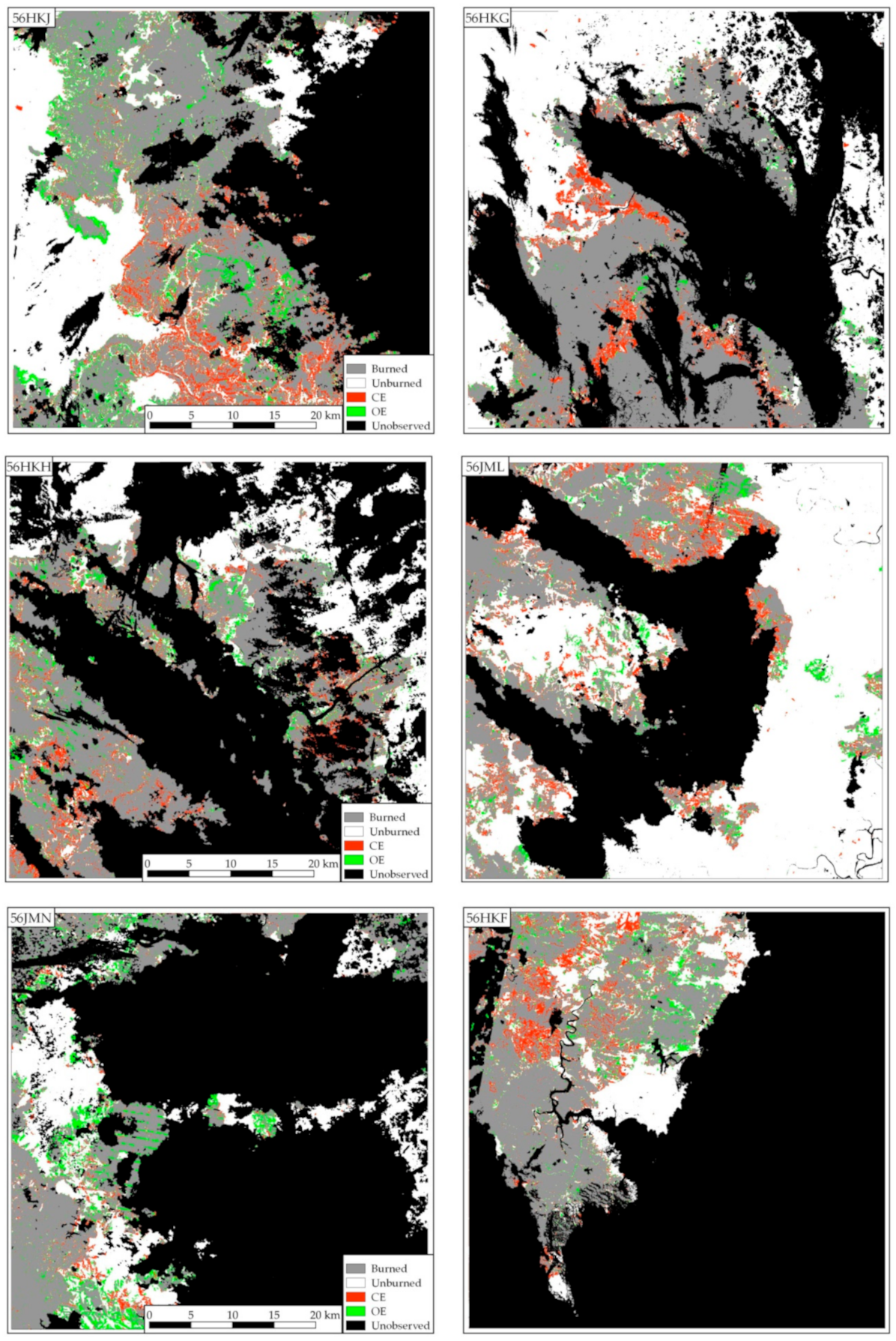
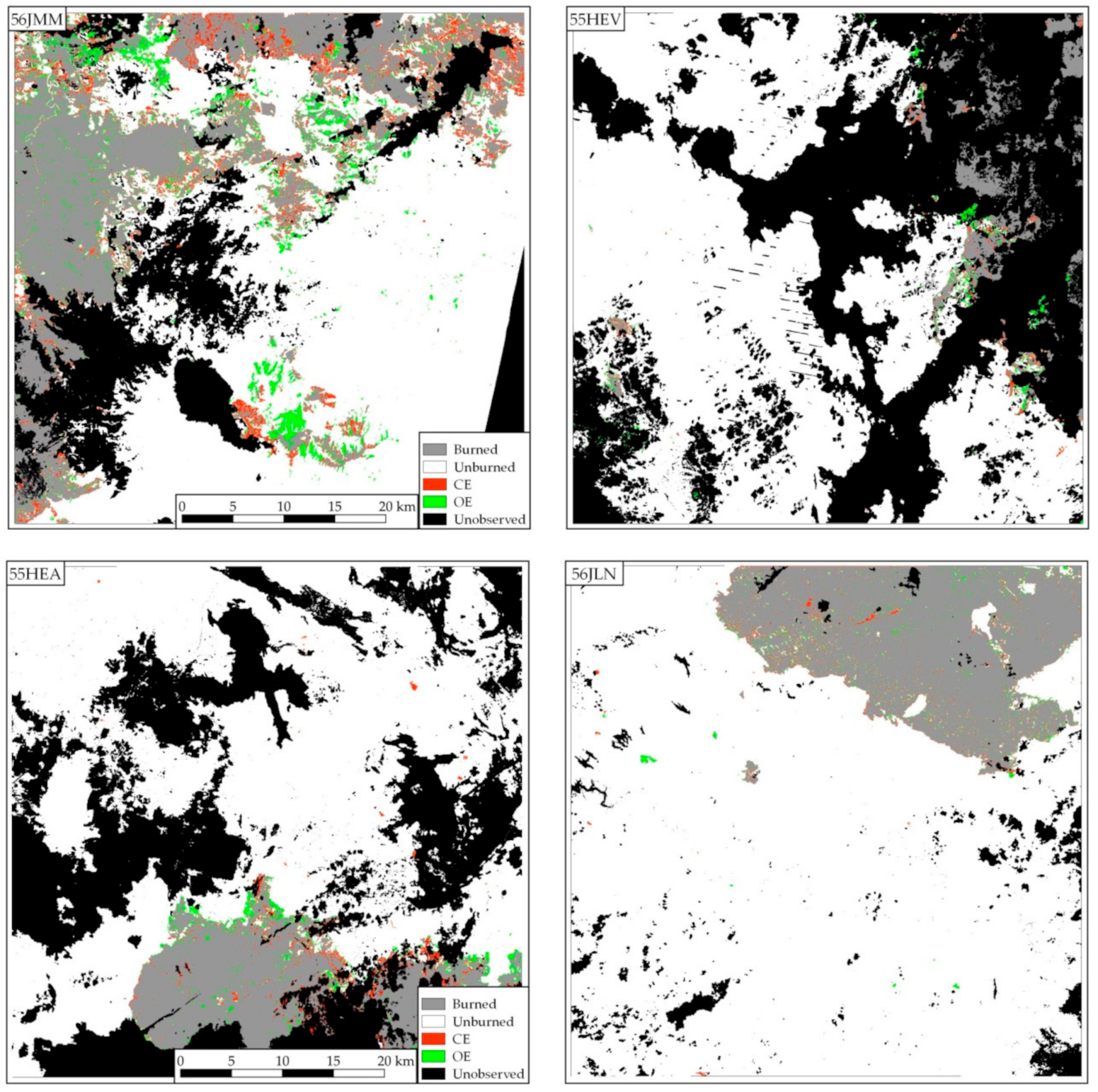
3.1.2. Validation
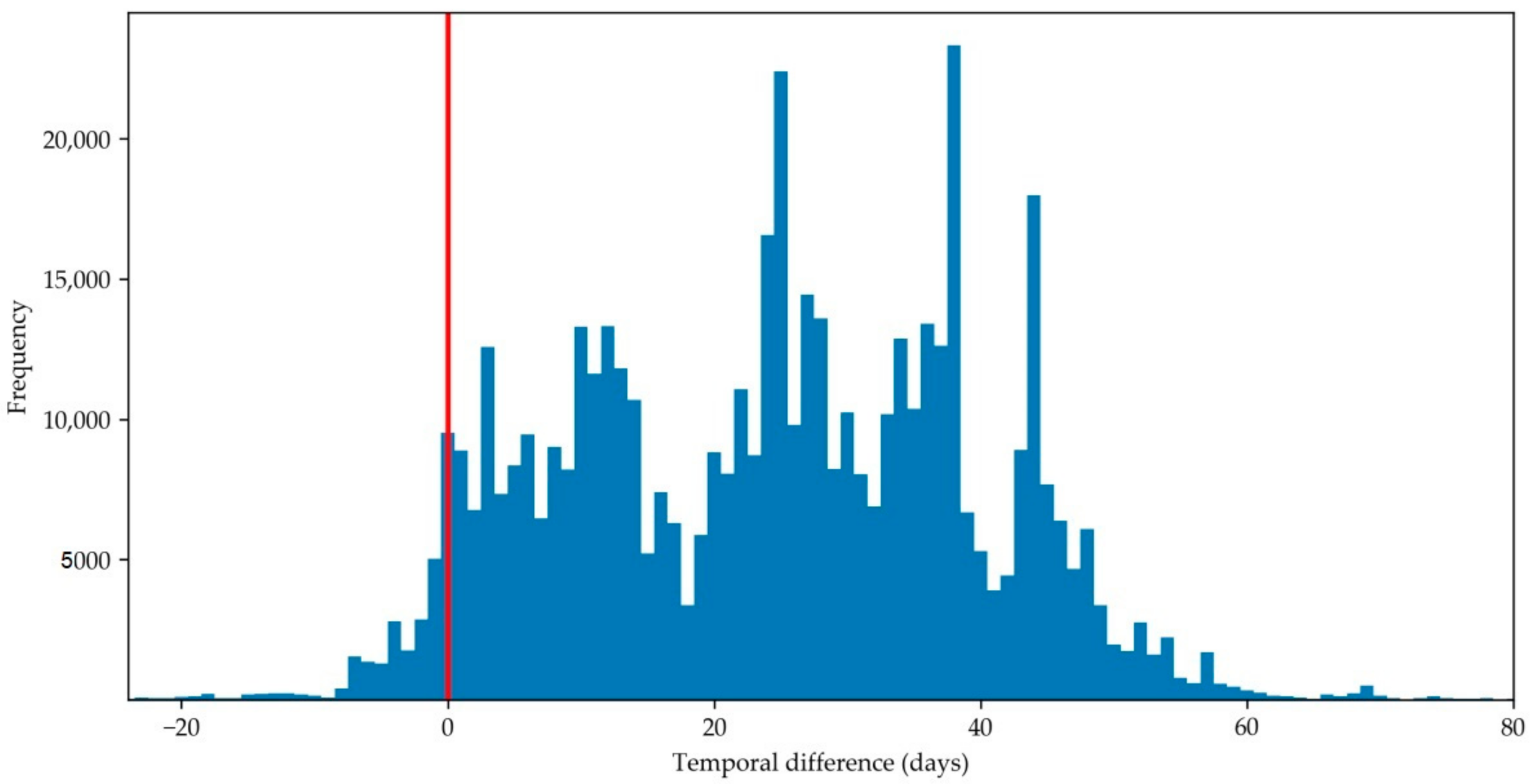
3.1.3. Temporal Accuracy
3.2. Canada
4. Discussion
Known Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A


References
- Van Der Werf, G.R.; Randerson, J.T.; Giglio, L.; Van Leeuwen, T.T.; Chen, Y.; Rogers, B.M.; Mu, M.; Van Marle, M.J.E.; Morton, D.C.; Collatz, G.J.; et al. Global fire emissions estimates during 1997–2016. Earth Syst. Sci. Data 2017, 9, 697–720. [Google Scholar] [CrossRef] [Green Version]
- Goldammer, J.G.; Statheropoulos, M.; Andreae, M.O. Impacts of Vegetation Fire Emissions on the Environment, Human Health, and Security: A Global Perspective. In Wildland Fires and Air Pollution; Bytnerowicz, A., Arbaugh, M.J., Riebau, A.R., Andersen, C.B.T.-D., Eds.; Elsevier: Amsterdam, The Netherlands, 2008; Volume 8, pp. 3–36. ISBN 1474–8177. [Google Scholar]
- Roos, C.I.; Scott, A.C.; Belcher, C.M.; Chaloner, W.G.; Aylen, J.; Bird, R.B.; Coughlan, M.R.; Johnson, B.R.; Johnston, F.H.; McMorrow, J.; et al. Living on a flammable planet: Interdisciplinary, cross-scalar and varied cultural lessons, prospects and challenges. Philos. Trans. R. Soc. B Biol. Sci. 2016, 371, 20150469. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Randerson, J.T.; Chen, Y.; Van Der Werf, G.R.; Rogers, B.M.; Morton, D.C. Global burned area and biomass burning emissions from small fires. J. Geophys. Res. Space Phys. 2012, 117. [Google Scholar] [CrossRef]
- Giglio, L.; Boschetti, L.; Roy, D.P.; Humber, M.L.; Justice, C.O. The Collection 6 MODIS burned area mapping algorithm and product. Remote Sens. Environ. 2018, 217, 72–85. [Google Scholar] [CrossRef] [PubMed]
- Lizundia-Loiola, J.; Otón, G.; Ramo, R.; Chuvieco, E. A spatio-temporal active-fire clustering approach for global burned area mapping at 250 m from MODIS data. Remote Sens. Environ. 2020, 236, 111493. [Google Scholar] [CrossRef]
- Tansey, K.; Grégoire, J.; Stroppiana, D.; Sousa, A.; Silva, J.; Pereira, J.M.C.; Boschetti, L.; Maggi, M.; Brivio, P.A.; Fraser, R.; et al. Vegetation burning in the year 2000: Global burned area estimates from SPOT VEGETATION data. J. Geophys. Res. Space Phys. 2004, 109, D14S03. [Google Scholar] [CrossRef] [Green Version]
- Simon, M.; Plummer, S.; Fierens, F.; Hoelzemann, J.J.; Arino, O. Burnt area detection at global scale using ATSR-2: The GLOBSCAR products and their qualification. J. Geophys. Res. Space Phys. 2004, 109, D14S02. [Google Scholar] [CrossRef]
- Tansey, K.; Grégoire, J.-M.; Defourny, P.; Leigh, R.; Pekel, J.-F.; Van Bogaert, E.; Bartholomé, E. A new, global, multi-annual (2000–2007) burnt area product at 1 km resolution. Geophys. Res. Lett. 2008, 35, 35. [Google Scholar] [CrossRef]
- Tansey, K.; Bradley, A.; Smets, B.; van Best, C.; Lacaze, R. The Geoland2 BioPar Burned Area Product. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 22–27 April 2012; p. 4727. [Google Scholar]
- Roy, D.; Boschetti, L.; Justice, C.; Ju, J. The collection 5 MODIS burned area product—Global evaluation by comparison with the MODIS active fire product. Remote Sens. Environ. 2008, 112, 3690–3707. [Google Scholar] [CrossRef]
- Giglio, L.; Loboda, T.; Roy, D.P.; Quayle, B.; Justice, C.O. An active-fire based burned area mapping algorithm for the MODIS sensor. Remote Sens. Environ. 2009, 113, 408–420. [Google Scholar] [CrossRef]
- Alonso-Canas, I.; Chuvieco, E. Global burned area mapping from ENVISAT-MERIS and MODIS active fire data. Remote Sens. Environ. 2015, 163, 140–152. [Google Scholar] [CrossRef]
- Chuvieco, E.; Lizundia-Loiola, J.; Pettinari, M.L.; Ramo, R.; Padilla, M.; Tansey, K.; Mouillot, F.; Laurent, P.; Storm, T.; Heil, A.; et al. Generation and analysis of a new global burned area product based on MODIS 250 m reflectance bands and thermal anomalies. Earth Syst. Sci. Data 2018, 10, 2015–2031. [Google Scholar] [CrossRef] [Green Version]
- Padilla, M.; Stehman, S.V.; Ramo, R.; Corti, D.; Hantson, S.; Oliva, P.; Alonso-Canas, I.; Bradley, A.V.; Tansey, K.; Mota, B.; et al. Comparing the accuracies of remote sensing global burned area products using stratified random sampling and estimation. Remote Sens. Environ. 2015, 160, 114–121. [Google Scholar] [CrossRef] [Green Version]
- Roteta, E.; Bastarrika, A.; Padilla, M.; Storm, T.; Chuvieco, E. Development of a Sentinel-2 burned area algorithm: Generation of a small fire database for sub-Saharan Africa. Remote Sens. Environ. 2019, 222, 1–17. [Google Scholar] [CrossRef]
- Hantson, S.; Padilla, M.; Corti, D.; Chuvieco, E. Strengths and weaknesses of MODIS hotspots to characterize global fire occurrence. Remote Sens. Environ. 2013, 131, 152–159. [Google Scholar] [CrossRef]
- Boschetti, L.; Roy, D.P.; Giglio, L.; Huang, H.; Zubkova, M.; Humber, M.L. Global validation of the collection 6 MODIS burned area product. Remote Sens. Environ. 2019, 235, 111490. [Google Scholar] [CrossRef]
- Garcia, M.J.L.; Caselles, V. Mapping burns and natural reforestation using thematic Mapper data. Geocarto Int. 1991, 6, 31–37. [Google Scholar] [CrossRef]
- Koutsias, N.; Karteris, M. Burned area mapping using logistic regression modeling of a single post-fire Landsat-5 Thematic Mapper image. Int. J. Remote Sens. 2000, 21, 673–687. [Google Scholar] [CrossRef]
- Chuvieco, E.; Mouillot, F.; van der Werf, G.R.; Miguel, J.S.; Tanase, M.; Koutsias, N.; García, M.; Yebra, M.; Padilla, M.; Gitas, I.; et al. Historical background and current developments for mapping burned area from satellite Earth observation. Remote Sens. Environ. 2019, 225, 45–64. [Google Scholar] [CrossRef]
- Boschetti, L.; Roy, D.P.; Justice, C.O.; Humber, M.L. MODIS–Landsat fusion for large area 30 m burned area mapping. Remote Sens. Environ. 2015, 161, 27–42. [Google Scholar] [CrossRef]
- Long, T.; Zhang, Z.; He, G.; Jiao, W.; Tang, C.; Wu, B.; Zhang, X.; Wang, G.; Yin, R. 30 m Resolution Global Annual Burned Area Mapping Based on Landsat Images and Google Earth Engine. Remote Sens. 2019, 11, 489. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Heiskanen, J.; Maeda, E.E.; Pellikka, P.K. Burned area detection based on Landsat time series in savannas of southern Burkina Faso. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 210–220. [Google Scholar] [CrossRef] [Green Version]
- Hawbaker, T.J.; Vanderhoof, M.K.; Beal, Y.-J.; Takacs, J.D.; Schmidt, G.L.; Falgout, J.T.; Williams, B.; Fairaux, N.M.; Caldwell, M.K.; Picotte, J.J.; et al. Mapping burned areas using dense time-series of Landsat data. Remote Sens. Environ. 2017, 198, 504–522. [Google Scholar] [CrossRef]
- Filipponi, F. Exploitation of Sentinel-2 Time Series to Map Burned Areas at the National Level: A Case Study on the 2017 Italy Wildfires. Remote Sens. 2019, 11, 622. [Google Scholar] [CrossRef] [Green Version]
- Roy, D.P.; Huang, H.; Boschetti, L.; Giglio, L.; Yan, L.; Zhang, H.H.; Li, Z. Landsat-8 and Sentinel-2 burned area mapping—A combined sensor multi-temporal change detection approach. Remote Sens. Environ. 2019, 231. [Google Scholar] [CrossRef]
- Hawbaker, T.J.; Vanderhoof, M.K.; Schmidt, G.L.; Beal, Y.-J.; Picotte, J.J.; Takacs, J.D.; Falgout, J.T.; Dwyer, J.L. The Landsat Burned Area algorithm and products for the conterminous United States. Remote Sens. Environ. 2020, 244, 111801. [Google Scholar] [CrossRef]
- Goodwin, N.R.; Collett, L.J. Development of an automated method for mapping fire history captured in Landsat TM and ETM+ time series across Queensland, Australia. Remote Sens. Environ. 2014, 148, 206–221. [Google Scholar] [CrossRef]
- Roy, D.P.; Frost, P.G.H.; Justice, C.O.; Landmann, T.; Le Roux, J.L.; Gumbo, K.; Makungwa, S.; Dunham, K.; Du Toit, R.; Mhwandagaraii, K.; et al. The Southern Africa Fire Network (SAFNet) regional burned-area product-validation protocol. Int. J. Remote Sens. 2005, 26, 4265–4292. [Google Scholar] [CrossRef]
- Boschetti, L.; Roy, D.P.; Justice, C.O. International Global Burned Area Satellite Product Validation Protocol Part I-Production and Standardization of Validation Reference Data (to be Followed by Part II-Accuracy Reporting); Committee on Earth Observation Satellites: Silver Spring, MD, USA, 2009. [Google Scholar]
- Roy, D.; Boschetti, L. Southern Africa Validation of the MODIS, L3JRC, and GlobCarbon Burned-Area Products. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1032–1044. [Google Scholar] [CrossRef]
- Boschetti, L.; Stehman, S.V.; Roy, D.P. A stratified random sampling design in space and time for regional to global scale burned area product validation. Remote Sens. Environ. 2016, 186, 465–478. [Google Scholar] [CrossRef]
- Padilla, M.; Stehman, S.V.; Chuvieco, E. Validation of the 2008 MODIS-MCD45 global burned area product using stratified random sampling. Remote Sens. Environ. 2014, 144, 187–196. [Google Scholar] [CrossRef]
- Chen, D.; Pereira, J.M.; Masiero, A.; Pirotti, F. Mapping fire regimes in China using MODIS active fire and burned area data. Appl. Geogr. 2017, 85, 14–26. [Google Scholar] [CrossRef]
- Bastarrika, A.; Alvarado, M.; Artano, K.; Martinez, M.P.; Mesanza, A.; Torre, L.; Ramo, R.; Chuvieco, E. BAMS: A Tool for Supervised Burned Area Mapping Using Landsat Data. Remote Sens. 2014, 6, 12360–12380. [Google Scholar] [CrossRef] [Green Version]
- Franquesa, M.; Vanderhoof, M.K.; Stavrakoudis, D.; Gitas, I.Z.; Roteta, E.; Padilla, M.; Chuvieco, E. Development of a standard database of reference sites for validating global burned area products. Earth Syst. Sci. Data 2020, 12, 3229–3246. [Google Scholar] [CrossRef]
- Padilla, M.; Stehman, S.V.; Litago, J.; Chuvieco, E. Assessing the Temporal Stability of the Accuracy of a Time Series of Burned Area Products. Remote Sens. 2014, 6, 2050–2068. [Google Scholar] [CrossRef] [Green Version]
- Valencia, G.M.; Anaya, J.A.; Velásquez, É.A.; Ramo, R.; Caro-Lopera, F.J. About Validation-Comparison of Burned Area Products. Remote Sens. 2020, 12, 3972. [Google Scholar] [CrossRef]
- Alva-Álvarez, G.I.; Reyes-Hernández, H.; Palacio-Aponte, Á.G.; Núñez-López, D.; Muñoz-Robles, C. Cambios en el paisaje ocasionados por incendios forestales en la región de Madera, Chihuahua. Madera Bosques 2018, 24. [Google Scholar] [CrossRef]
- Vanderhoof, M.K.; Fairaux, N.; Beal, Y.-J.G.; Hawbaker, T.J. Validation of the USGS Landsat Burned Area Essential Climate Variable (BAECV) across the conterminous United States. Remote Sens. Environ. 2017, 198, 393–406. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High resolution global maps of 21st-century forest cover change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, L.; Diao, C.; Xian, G.; Yin, D.; Lu, Y.; Zou, S.; Erickson, T.A. A summary of the special issue on remote sensing of land change science with Google earth engine. Remote Sens. Environ. 2020, 248, 112002. [Google Scholar] [CrossRef]
- Mutanga, O.; Kumar, L. Google earth engine applications. Remote Sens. 2019, 11, 591. [Google Scholar] [CrossRef] [Green Version]
- Daldegan, G.A.; Roberts, D.A.; Ribeiro, F.D.F. Spectral mixture analysis in Google Earth Engine to model and delineate fire scars over a large extent and a long time-series in a rainforest-savanna transition zone. Remote Sens. Environ. 2019, 232. [Google Scholar] [CrossRef]
- Seydi, S.T.; Akhoondzadeh, M.; Amani, M.; Mahdavi, S. Wildfire Damage Assessment over Australia Using Sentinel-2 Imagery and MODIS Land Cover Product within the Google Earth Engine Cloud Platform. Remote Sens. 2021, 13, 220. [Google Scholar] [CrossRef]
- Roteta, E.; Oliva, P. Optimization of a Random Forest Classifier for Burned Area Detection in Chile Using Sentinel-2 Data. In Proceedings of the 2020 IEEE Latin American GRSS and ISPRS Remote Sensing Conference, LAGIRS 2020-Proceedings, Santiago, Chile, 21–26 March 2020. [Google Scholar]
- Landsat Missions. Available online: https://www.usgs.gov/core-science-systems/nli/landsat (accessed on 24 January 2021).
- Masek, J.; Vermote, E.; Saleous, N.; Wolfe, R.; Hall, F.; Huemmrich, K.; Gao, F.; Kutler, J.; Lim, T.-K. A Landsat Surface Reflectance Dataset for North America, 1990–2000. IEEE Geosci. Remote Sens. Lett. 2006, 3, 68–72. [Google Scholar] [CrossRef]
- Vermote, E.; Justice, C.; Claverie, M.; Franch, B. Preliminary analysis of the performance of the Landsat 8/OLI land surface reflectance product. Remote Sens. Environ. 2016, 185, 46–56. [Google Scholar] [CrossRef] [PubMed]
- ESA-Sentinel-2. Available online: http://www.esa.int/Applications/Observing_the_Earth/Copernicus/Sentinel-2 (accessed on 24 January 2021).
- Gascon, F.; Bouzinac, C.; Thépaut, O.; Jung, M.; Francesconi, B.; Louis, J.; Lonjou, V.; Lafrance, B.; Massera, S.; Gaudel-Vacaresse, A.; et al. Copernicus Sentinel-2A Calibration and Products Validation Status. Remote Sens. 2017, 9, 584. [Google Scholar] [CrossRef] [Green Version]
- Level-2A Algorithm-Sentinel-2 MSI Technical Guide-Sentinel Online-Sentinel. Available online: https://sentinel.esa.int/web/sentinel/technical-guides/sentinel-2-msi/level-2a/algorithm (accessed on 24 January 2021).
- Coluzzi, R.; Imbrenda, V.; Lanfredi, M.; Simoniello, T. A first assessment of the Sentinel-2 Level 1-C cloud mask product to support informed surface analyses. Remote Sens. Environ. 2018, 217, 426–443. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A. Monitoring the Vernal Advancement and Retrogradation (Greenwave Effect) of Natural Vegetation; NASA/GSFC Type III Final Report; Goddard Space Flight Center: Greenbelt, MD, USA, 1974; pp. 1–8. [Google Scholar]
- Key, C.H.; Benson, N. The Normalized Burn Ratio (NBR): A Landsat TM Radiometric Measure of Burn Severity; US Geological Survey, Northern Rocky Mountain Science Center: Bozeman, MT, USA, 1999. [Google Scholar]
- Griffiths, P.; Nendel, C.; Hostert, P. Intra-annual reflectance composites from Sentinel-2 and Landsat for national-scale crop and land cover mapping. Remote Sens. Environ. 2019, 220, 135–151. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees; Wadsworth International Group: Belmont, CA, USA, 1984; ISBN 9780534980535. [Google Scholar]
- Vapnik, V. Pattern recognition using generalized portrait method. Autom. Remote Control 1963, 24, 774–780. [Google Scholar]
- Belgiu, M.; Drăgu, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Bastarrika, A.; Chuvieco, E.; Martín, M.P. Mapping burned areas from Landsat TM/ETM+ data with a two-phase algorithm: Balancing omission and commission errors. Remote Sens. Environ. 2011, 115, 1003–1012. [Google Scholar] [CrossRef]
- Justice, C.; Belward, A.; Morisette, J.; Lewis, P.; Privette, J.; Baret, F. Developments in the ‘validation’ of satellite sensor products for the study of the land surface. Int. J. Remote Sens. 2000, 21, 3383–3390. [Google Scholar] [CrossRef]
- Roy, D.P.; Borak, J.S.; Devadiga, S.; Wolfe, R.E.; Zheng, M.; Descloitres, J. The MODIS Land product quality assessment approach. Remote Sens. Environ. 2002, 83, 62–76. [Google Scholar] [CrossRef]
- Morisette, J.T.; Privette, J.L.; Justice, C.O. A framework for the validation of MODIS Land products. Remote Sens. Environ. 2002, 83, 77–96. [Google Scholar] [CrossRef]
- Padilla, M.; Olofsson, P.; Stehman, S.V.; Tansey, K.; Chuvieco, E. Stratification and sample allocation for reference burned area data. Remote Sens. Environ. 2017, 203, 240–255. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Yang, Z.G.; Cohen, W.B. Detecting trends in forest disturbance and recovery using yearly Landsat time series: 1. LandTrendr—Temporal segmentation algorithms. Remote Sens. Environ. 2010, 114, 2897–2910. [Google Scholar] [CrossRef]
- Cohen, W.B.; Yang, Z.G.; Kennedy, R. Detecting trends in forest disturbance and recovery using yearly Landsat time series: 2. TimeSync—Tools for calibration and validation. Remote Sens. Environ. 2010, 114, 2911–2924. [Google Scholar] [CrossRef]
- Olson, D.M.; Dinerstein, E.; Wikramanayake, E.D.; Burgess, N.D.; Powell, G.V.N.; Underwood, E.C.; D’amico, J.A.; Itoua, I.; Strand, H.E.; Morrison, J.C.; et al. Terrestrial Ecoregions of the World: A New Map of Life on Earth. Bioscience 2001, 51, 933. [Google Scholar] [CrossRef]
- Giglio, L.; Randerson, J.T.; Van Der Werf, G.R.; Kasibhatla, P.S.; Collatz, G.J.; Morton, D.C.; DeFries, R.S. Assessing variability and long-term trends in burned area by merging multiple satellite fire products. Biogeosciences 2010, 7, 1171–1186. [Google Scholar] [CrossRef] [Green Version]
- Giglio, L.; Descloitres, J.; Justice, C.O.; Kaufman, Y.J. An Enhanced Contextual Fire Detection Algorithm for MODIS. Remote Sens. Environ. 2003, 87, 273–282. [Google Scholar] [CrossRef]
- Giglio, L. Characterization of the tropical diurnal fire cycle using VIRS and MODIS observations. Remote Sens. Environ. 2007, 108, 407–421. [Google Scholar] [CrossRef]
- Boschetti, L.; Brivio, P.A.; Eva, H.; Gallego, J.; Baraldi, A.; Gregoire, J.-M. A sampling method for the retrospective validation of global burned area products. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1765–1773. [Google Scholar] [CrossRef]
- Yu, P.; Xu, R.; Abramson, M.J.; Li, S.; Guo, Y. Bushfires in Australia: A serious health emergency under climate change. Lancet Planet. Health 2020, 4, e7–e8. [Google Scholar] [CrossRef] [Green Version]
- Schweinsberg, S.; Darcy, S.; Beirman, D. ‘Climate crisis’ and ‘bushfire disaster’: Implications for tourism from the involvement of social media in the 2019–2020 Australian bushfires. J. Hosp. Tour. Manag. 2020, 43, 294–297. [Google Scholar] [CrossRef]
- Bowman, D.; Williamson, G.; Yebra, M.; Lizundia-Loiola, J.; Pettinari, M.L.; Shah, S.; Bradstock, R.; Chuvieco, E. Wildfires: Australia needs national monitoring agency. Nat. Cell Biol. 2020, 584, 188–191. [Google Scholar] [CrossRef]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Dice, L.R. Measures of the Amount of Ecologic Association between Species. Ecology 1945, 26, 297–302. [Google Scholar] [CrossRef]
- Fleiss, J.L. Statistical Methods for Rates and Proportions; Wiley: New York, NY, USA, 1981; ISBN 0471064289. [Google Scholar]
- Schroeder, W.; Oliva, P.; Giglio, L.; Csiszar, I.A. The New VIIRS 375 m active fire detection data product: Algorithm description and initial assessment. Remote Sens. Environ. 2014, 143, 85–96. [Google Scholar] [CrossRef]
- Now Worst Fire Season on Record as, B.C. Extends State of Emergency | CBC News. 2018. Available online: https://www.cbc.ca/news/canada/british-columbia/state-emergency-bc-wildfires-1.4803546 (accessed on 24 January 2021).
- Fire Perimeters-Historical-Datasets-Data Catalogue. Available online: https://catalogue.data.gov.bc.ca/dataset/fire-perimeters-historical (accessed on 23 January 2021).
- Fire Incident Locations-Historical-Datasets-Data Catalogue. Available online: https://catalogue.data.gov.bc.ca/dataset/fire-incident-locations-historical (accessed on 23 January 2021).
- Canadian Interagency Forest Fire Centre Inc. Canada Report. 2018. Available online: https://www.ciffc.ca/sites/default/files/2019–06/2018CanadaReport2019_05_28R1.pdf (accessed on 23 January 2021).
- Canadian Wildland Fire Information System | Data Sources and Methods for Daily Maps. Available online: https://cwfis.cfs.nrcan.gc.ca/background/dsm/fm3 (accessed on 24 January 2021).
- Fraser, R.; Li, Z.; Cihlar, J. Hotspot and NDVI Differencing Synergy (HANDS) a New Technique for Burned Area Mapping over Boreal Forest. Remote Sens. Environ. 2000, 74, 362–376. [Google Scholar] [CrossRef]
- Ho, T.K. The random subspace method for constructing decision forests. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 832–844. [Google Scholar]
- Çömert, R.; Matci, D.K.; Avdan, U. Object Based Burned Area Mapping with Random Forest Algorithm. Int. J. Eng. Geosci. 2019, 4, 78–87. [Google Scholar] [CrossRef]
- Sulova, A.; Arsanjani, J.J. Exploratory Analysis of Driving Force of Wildfires in Australia: An Application of Machine Learning within Google Earth Engine. Remote Sens. 2021, 13, 10. [Google Scholar] [CrossRef]
- Ramo, R.; Chuvieco, E. Developing a Random Forest Algorithm for MODIS Global Burned Area Classification. Remote Sens. 2017, 9, 1193. [Google Scholar] [CrossRef] [Green Version]
- Ramo, R.; García, M.; Rodríguez, D.; Chuvieco, E. A data mining approach for global burned area mapping. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 39–51. [Google Scholar] [CrossRef]
- Pereira, J.M.; Sá, A.C.; Sousa, A.M.; Silva, J.M.; Santos, T.N.; Carreiras, J.M. Spectral characterisation and discrimination of burnt areas. In Remote Sensing of Large Wildfires; Chuvieco, E., Ed.; Springer: Berlin/Heidelberg, Germany, 1999; pp. 123–138. [Google Scholar]
- Smiraglia, D.; Filipponi, F.; Mandrone, S.; Tornato, A.; Taramelli, A. Agreement Index for Burned Area Mapping: Integration of Multiple Spectral Indices Using Sentinel-2 Satellite Images. Remote Sens. 2020, 12, 1862. [Google Scholar] [CrossRef]
- Stroppiana, D.; Bordogna, G.; Carrara, P.; Boschetti, M.; Brivio, P. A method for extracting burned areas from Landsat TM/ETM+ images by soft aggregation of multiple Spectral Indices and a region growing algorithm. ISPRS J. Photogramm. Remote Sens. 2012, 69, 88–102. [Google Scholar] [CrossRef]
- Mouillot, F.; Schultz, M.G.; Yue, C.; Cadule, P.; Tansey, K.; Ciais, P.; Chuvieco, E. Ten years of global burned area products from spaceborne remote sensing—A review: Analysis of user needs and recommendations for future developments. Int. J. Appl. Earth Obs. Geoinf. 2014, 26, 64–79. [Google Scholar] [CrossRef] [Green Version]
- Filkov, A.I.; Ngo, T.; Matthews, S.; Telfer, S.; Penman, T.D. Impact of Australia’s catastrophic 2019/20 bushfire season on communities and environment. Retrospective analysis and current trends. J. Saf. Sci. Resil. 2020, 1, 44–56. [Google Scholar] [CrossRef]
- Key, C.H. Ecological and Sampling Constraints on Defining Landscape Fire Severity. Fire Ecol. 2006, 2, 34–59. [Google Scholar] [CrossRef]
- Oliva, P.; Schroeder, W. Assessment of VIIRS 375 m active fire detection product for direct burned area mapping. Remote Sens. Environ. 2015, 160, 144–155. [Google Scholar] [CrossRef]
- Achanta, R.; Süsstrunk, S. Superpixels and Polygons Using Simple Non-Iterative Clustering. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Cuevas-González, M.; Gerard, F.; Balzter, H.; Riaño, D. Analysing forest recovery after wildfire disturbance in boreal Siberia using remotely sensed vegetation indices. Glob. Chang. Biol. 2009, 15, 561–577. [Google Scholar] [CrossRef]
- Sader, S.A.; Stone, T.A.; Joyce, A.T. Remote sensing of tropical forests: An overview of research and applications using non-photographic sensors. Photogramm. Eng. Remote Sens. 1990, 56, 1343–1351. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Landsat-4 and 5 | Landsat-7 | Landsat-8 | Sentinel-2A and B | Approximate Wavelength (μm) |
|---|---|---|---|---|---|
| Sensor | TM | ETM + | OLI | MSI | – |
| Product | LSR | LSR | LSR | L1C | – |
| Blue | B1 | B1 | B2 | B2 | 0.45–0.52 |
| Green | B2 | B2 | B3 | B3 | 0.53–0.59 |
| Red | B3 | B3 | B4 | B4 | 0.63–0.68 |
| NIR | B4 | B4 | B5 | B8 (20 m)/B8A (30 m) | 0.80–0.89 |
| Short SWIR | B5 | B5 | B6 | B11 | 1.55–1.70 |
| Long SWIR | B7 | B7 | B7 | B12 | 2.10–2.30 |
| Quality band | pixel_qa | pixel_qa | pixel_qa | QA60 | – |
| Landsat-4 to 8 | Sentinel-2 L1C | Sentinel-2 L2A |
|---|---|---|
| pixel_qa: 3rd bit (cloud shadow)5th bit (cloud) | QA60: 10th bit (opaque cloud) 11th bit (cirrus cloud) B1 > 1500 | SCL: value 3 (cloud shadow) value 8 (medium probability cloud) value 9 (high probability cloud) value 10 (thin cirrus) B1 > 2000 |
| Post-Fire Period | Number of Training Polygons | Iterations | Processing Time (Hours) | Number of Images | |
|---|---|---|---|---|---|
| Burned | Unburned | ||||
| 1 September–31 October 2019 | 26 | 15 | 20 | 11.0 | 938 |
| 1 November–31 December 2019 | 9 | 4 | 10 | 29.0 | 936 |
| 1 January–29 February 2020 | 10 | 8 | 9 | 14.5 | 910 |
| 1 March–30 April 2020 | 7 | 7 | 6 | 10.5 | 869 |
| Aggregated period | 52 | 34 | 45 | 64.0 | 3653 |
| 1 July–30 September 2018 (Canada) | 9 | 10 | 11 | 244.4 | 254,660 |
| Tile | Validation Period | Accuracy | |||||
|---|---|---|---|---|---|---|---|
| Start | End | Length in Days | Number of Images | CE | OE | DC | |
| 56HKJ | 2019/09/02 | 2020/02/19 | 170 | 10 | 13.6 | 10.8 | 87.8 |
| 56HKG | 2019/09/22 | 2020/02/29 | 160 | 8 | 10.6 | 2.9 | 93.1 |
| 56HKH | 2019/09/02 | 2020/02/19 | 170 | 9 | 11.4 | 8.0 | 90.3 |
| 56JML | 2019/09/03 | 2020/01/21 | 140 | 9 | 19.2 | 10.3 | 85.0 |
| 56JMN | 2019/09/02 | 2020/01/10 | 130 | 11 | 7.2 | 16.4 | 87.9 |
| 56HKF | 2019/09/07 | 2020/02/29 | 175 | 8 | 14.6 | 7.6 | 88.8 |
| 56JMM | 2019/09/02 | 2020/01/21 | 140 | 12 | 13.9 | 13.5 | 86.3 |
| 55HEV | 2019/09/10 | 2020/02/22 | 165 | 8 | 7.2 | 10.5 | 91.1 |
| 55HEA | 2019/09/10 | 2020/01/18 | 130 | 9 | 5.6 | 6.1 | 94.1 |
| 56JLN | 2019/09/02 | 2020/01/10 | 130 | 11 | 3.3 | 3.0 | 96.9 |
| Aggregated | – | – | – | – | 11.8 | 8.9 | 89.6 |
| Province | BAMT | CWFIS | Common BA |
|---|---|---|---|
| BC | 10,069 | 12,711 | 7633 |
| ON | 1778 | 1881 | 1142 |
| AB | 1175 | 97 | 83 |
| MB | 1146 | 1309 | 755 |
| SK | 1061 | 297 | 222 |
| QC | 868 | 205 | 151 |
| NL | 58 | 0 | 0 |
| NB | 5 | 0 | 0 |
| NS | 2 | 0 | 0 |
| PE | 2 | 0 | 0 |
| TOTAL | 16,165 | 16,501 | 9986 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roteta, E.; Bastarrika, A.; Franquesa, M.; Chuvieco, E. Landsat and Sentinel-2 Based Burned Area Mapping Tools in Google Earth Engine. Remote Sens. 2021, 13, 816. https://doi.org/10.3390/rs13040816
Roteta E, Bastarrika A, Franquesa M, Chuvieco E. Landsat and Sentinel-2 Based Burned Area Mapping Tools in Google Earth Engine. Remote Sensing. 2021; 13(4):816. https://doi.org/10.3390/rs13040816
Chicago/Turabian StyleRoteta, Ekhi, Aitor Bastarrika, Magí Franquesa, and Emilio Chuvieco. 2021. "Landsat and Sentinel-2 Based Burned Area Mapping Tools in Google Earth Engine" Remote Sensing 13, no. 4: 816. https://doi.org/10.3390/rs13040816
APA StyleRoteta, E., Bastarrika, A., Franquesa, M., & Chuvieco, E. (2021). Landsat and Sentinel-2 Based Burned Area Mapping Tools in Google Earth Engine. Remote Sensing, 13(4), 816. https://doi.org/10.3390/rs13040816