
A Watershed-Segmentation-Based Improved Algorithm for Extracting Cultivated Land Boundaries


Abstract
:
1. Introduction
2. Study Area and Data Sources
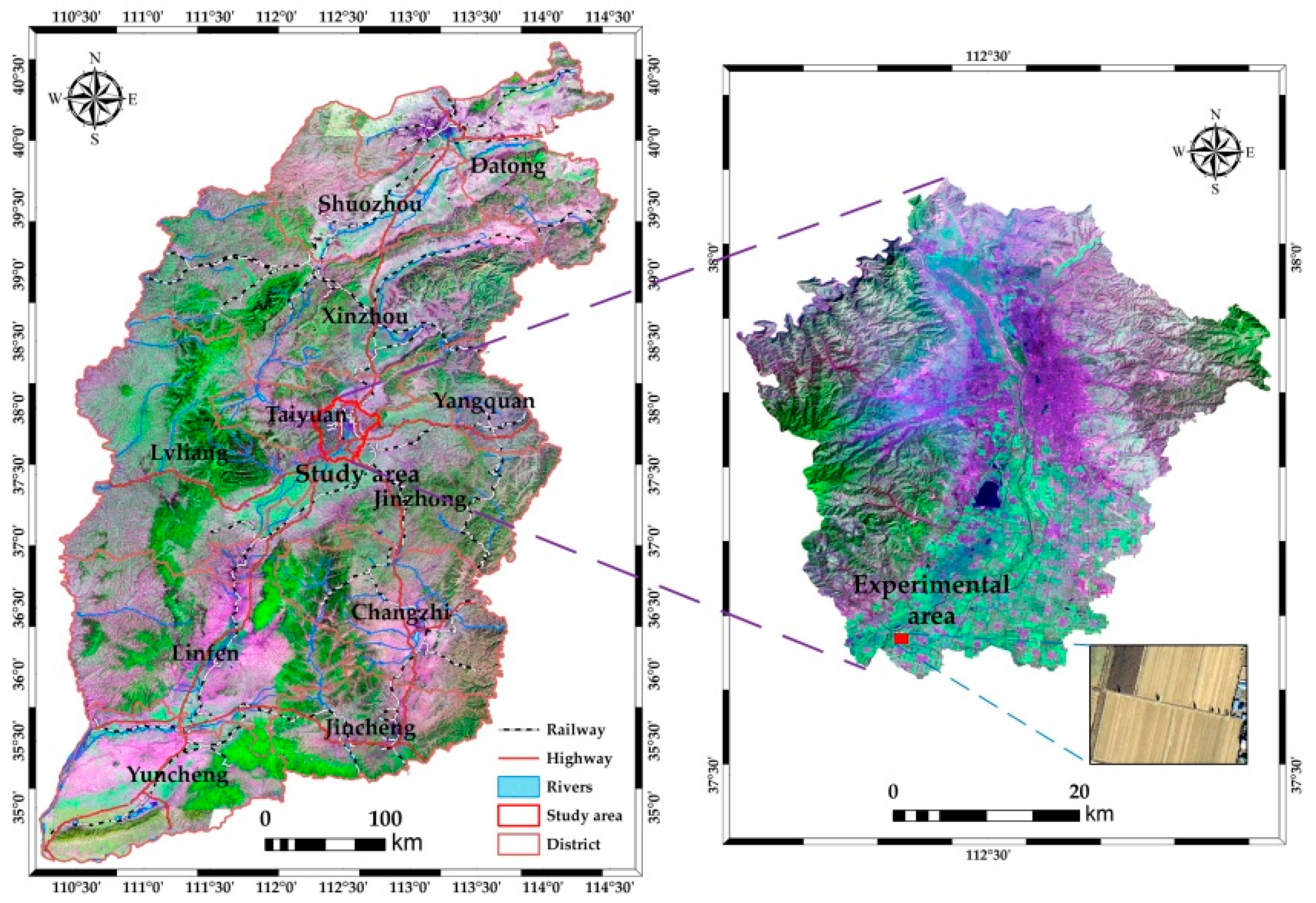
2.1. Study Area
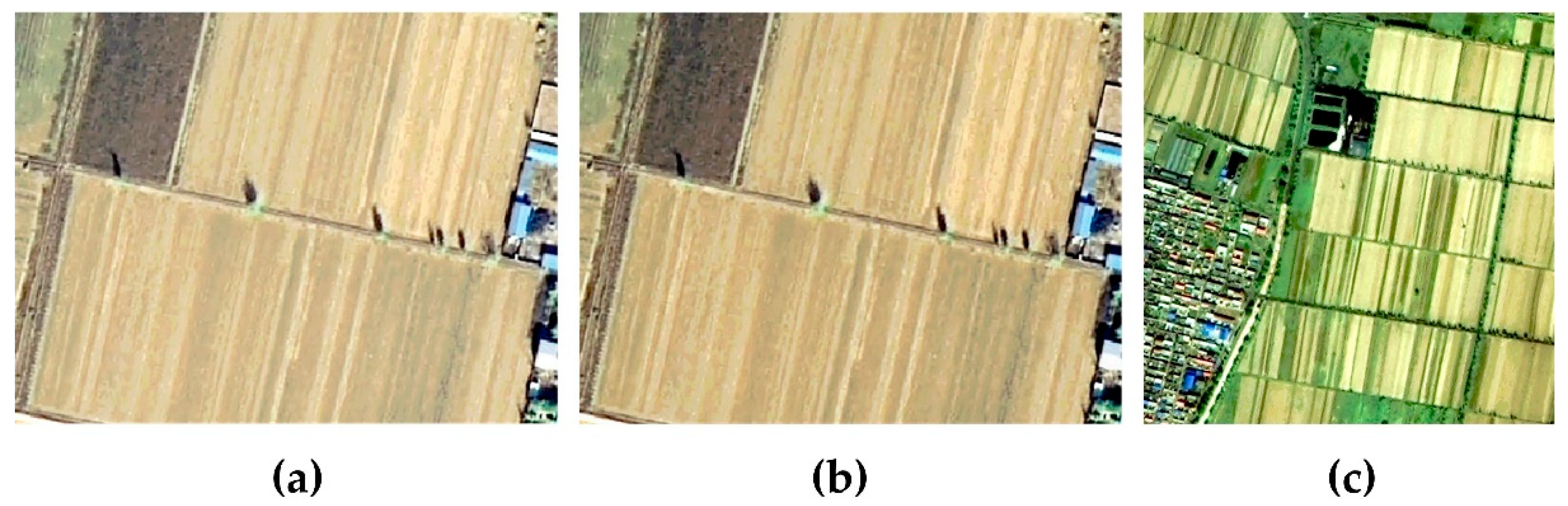
2.2. Data Sources
3. Methodology
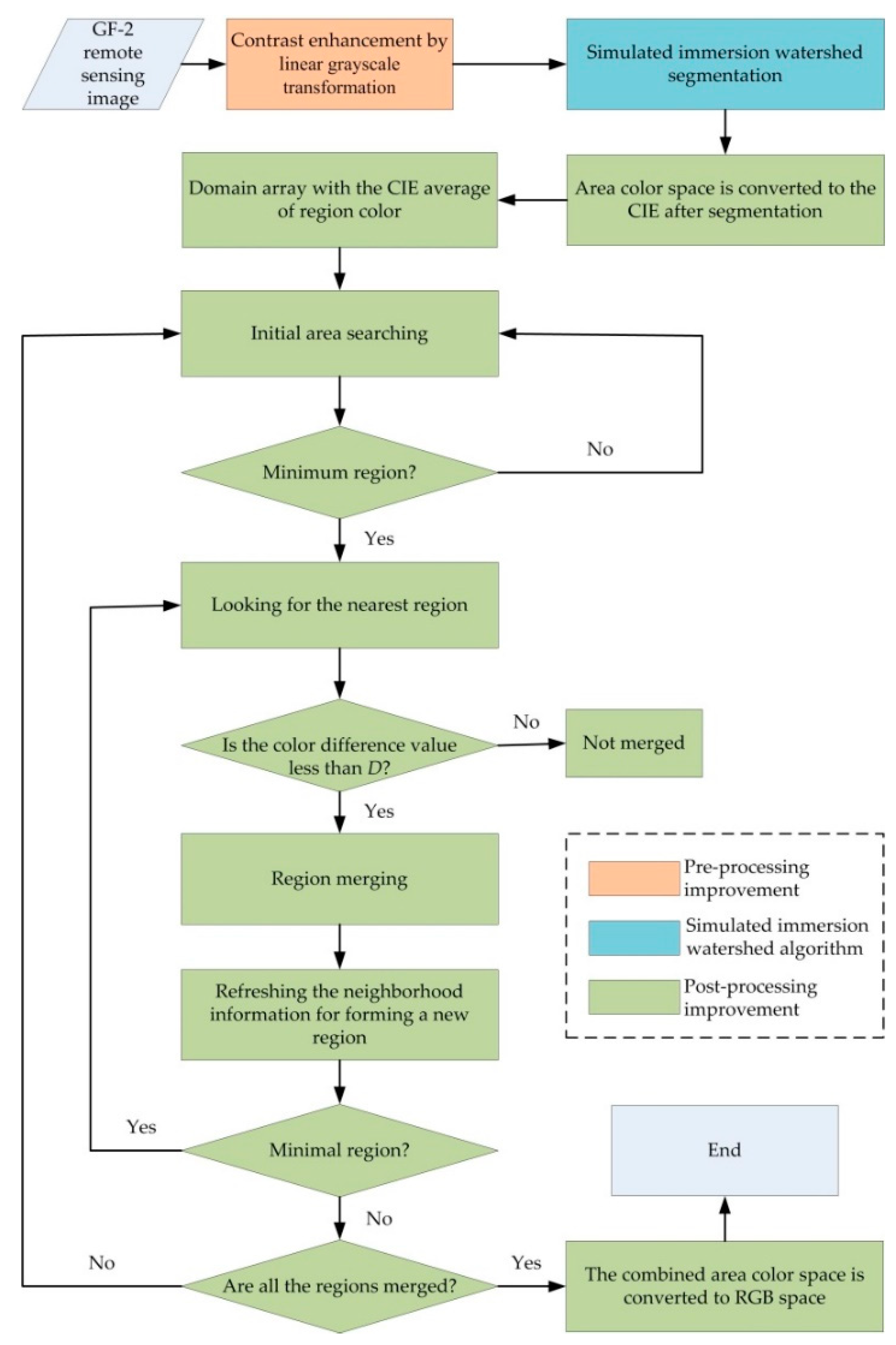
3.1. Technical Procedure
3.2. Contrast Enhancement
3.3. CIE Color Space and Transformation
3.3.1. Conversion between RGB and XYZ
3.3.2. Color Space Conversion between XYZ and Lab
3.3.3. Color Space Conversion between XYZ and Luv
3.4. Watershed Segmentation Algorithm Based on CIE Color Space Region Merging
- (1)
- An image is converted from the color to corresponding grayscale.
- (2)
- The gradient of each pixel in the image is calculated. To sort the gradient values from smallest to largest, and the same gradient is located at the same gradient level.
- (3)
- To process all the pixels of the first gradient level and check the neighborhoods of a certain pixel. If the neighborhoods have already been identified as a certain area or watershed, add the pixel to a first-in first-out (FIFO) queue.
- (4)
- The first pixel would be picked up when the FIFO queue is not empty. To scan the pixel neighborhoods, the identification of pixel is refreshed according to the neighborhood pixel, when the gradient of its neighboring pixels belongs to the same layer. The loop will be continued just the same until the queue is empty.
- (5)
- To scan the pixel of current gradient level again, it will be a new minimal area if there are unidentified pixels. Continue to perform step (4) from this pixel until there is no new minimal region.
- (6)
- Return to step (3) to continue processing the next gradient level until all levels of pixels have been processed.
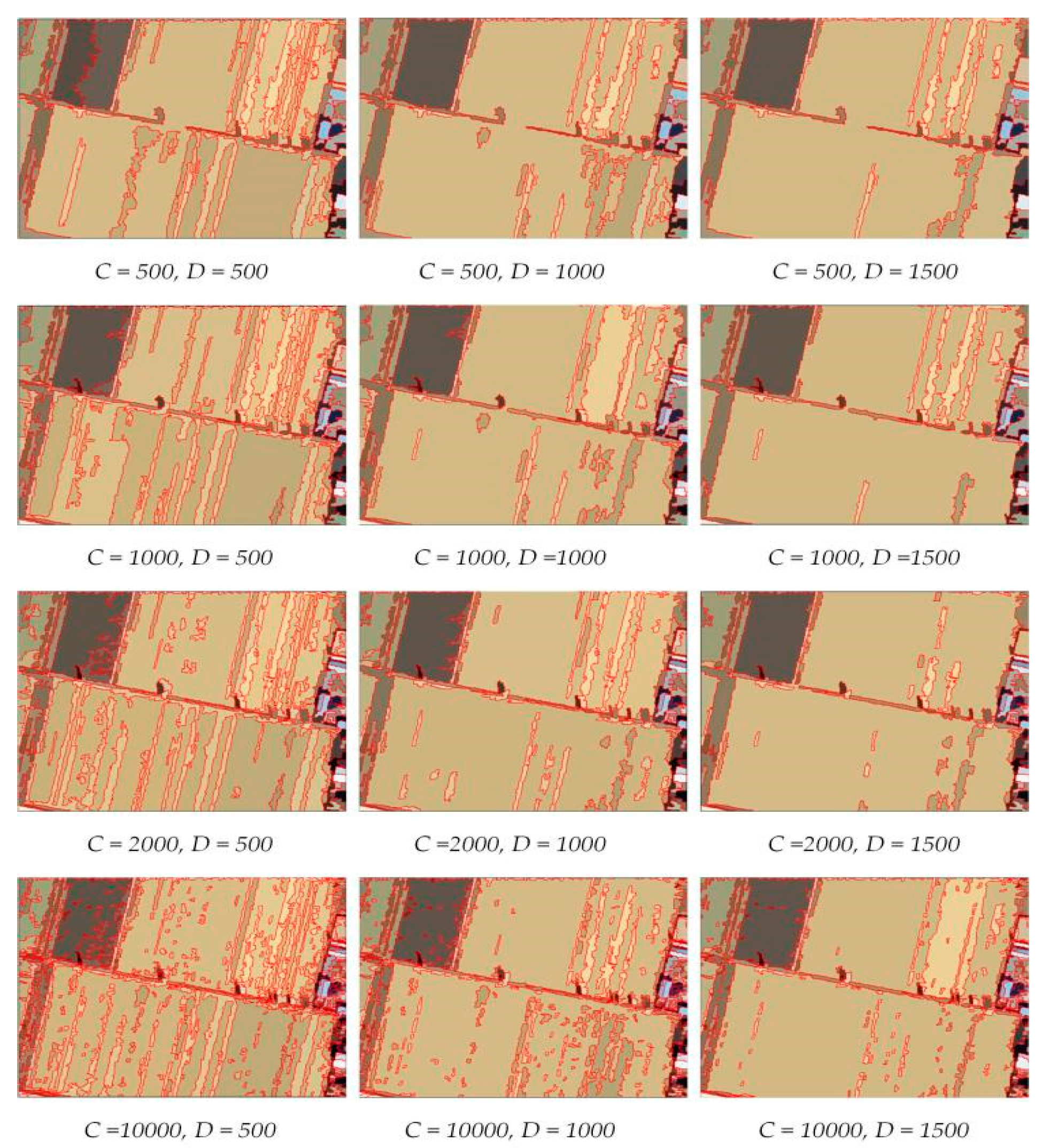
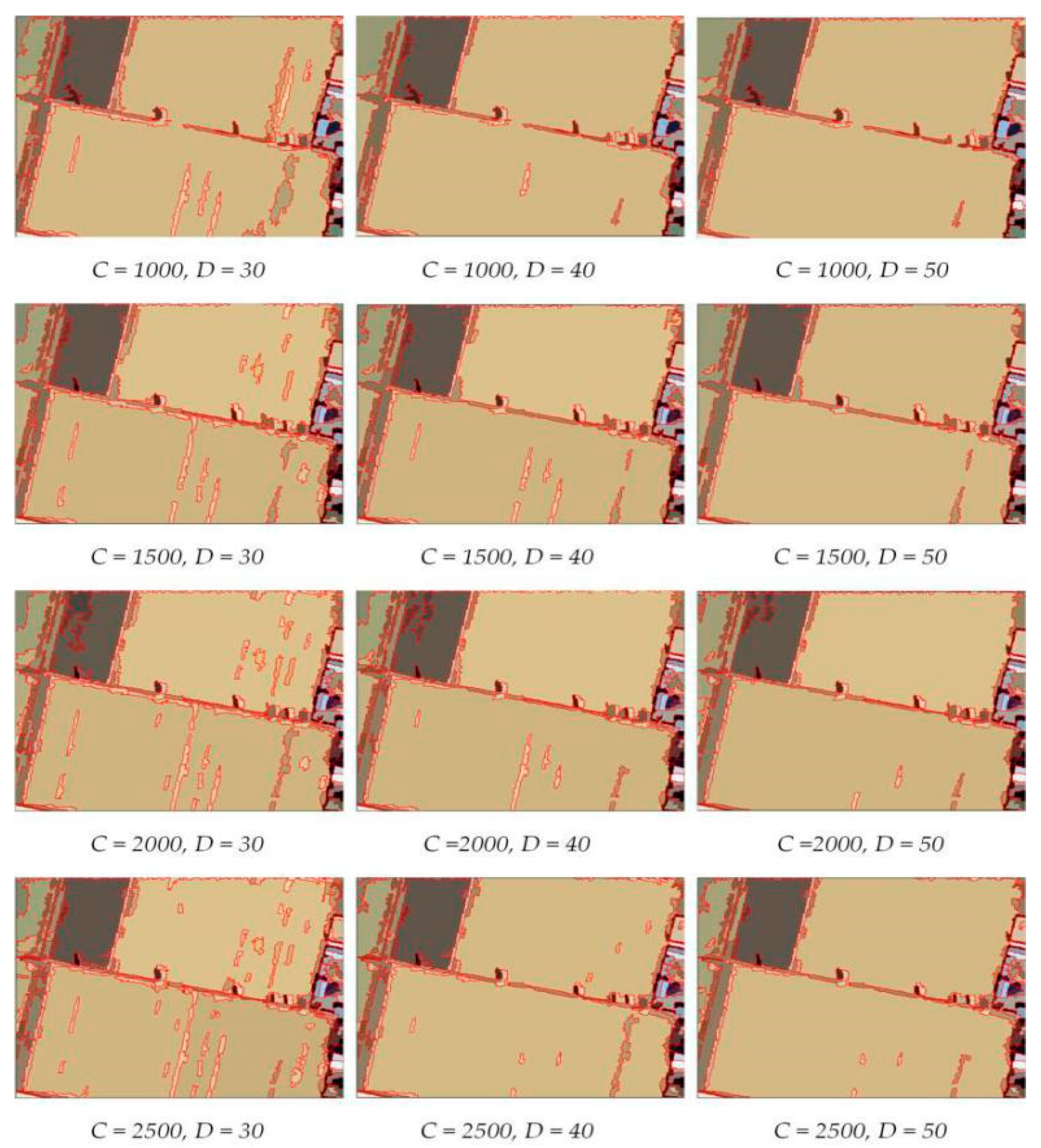
3.4.1. Segmentation Scale Parameter
3.4.2. Merging Scale Parameters
4. Accuracy Evaluation of Image Segmentation
4.1. Area Relative Error Criterion (δA)
4.2. Pixel Quantity Error Criterion (δP)
4.3. Consistency Criterion (Khat)
5. Results
5.1. Image Segmentation before and after Contrast Enhancement
5.2. The Optimal Scale Parameters in the Three Methods
5.3. Extraction of Cultivated Land Boundaries
5.4. Running Time of Segmentation Experiments
5.5. Extraction Accuracy
5.6. Comparison Experiment with a Larger Image
6. Discussion
6.1. Analysis of the Contrast Enhancement Image Segmentation
6.2. Analysis of the Optimal Scale Parameters
6.3. Analysis of the Extraction Effect
6.4. Analysis of the Proposed Method
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Useya, J.; Chen, S.B. Exploring the potential of mapping patterns on small holder scale croplands using Sentinel-1 SAR Data. Chin. Geogr. Sci. 2019, 29, 626–639. [Google Scholar] [CrossRef] [Green Version]
- Chen, G.; Sui, X.; Kamruzzaman, M.M. Agricultural Remote Sensing Image Cultivated Land Extraction Technology Based on Deep Learning. Rev. Tecn. Fac. Ingr. Univ. Zulia. 2019, 36, 2199–2209. [Google Scholar]
- Ma, E.P.; Cai, J.M.; Lin, J.; Guo, H.; Han, Y.; Liao, L.W. Spatio-temporal evolution of global food security pattern and its influencing factors in 2000–2014. Acta Geol. Sin. 2020, 75, 332–347. [Google Scholar]
- Deng, J.S.; Wang, K.; Shen, Z.Q.; Xu, H.W. Decision tree algorithm for automatically extracting farmland information from SPOT-5 images based on characteristic bands. Trans. CSAET 2004, 20, 145–148. [Google Scholar]
- Fritz, S.; See, L.; Mccallum, I.; Bun, A.; Moltchanova, E.; Duerauer, M.; Perger, C.; Havlik, P.; Mosnier, A.; Schepaschenko, D. Mapping global cropland and field size. Glob. Chang. Biol. 2015, 21, 1980–1992. [Google Scholar] [CrossRef]
- Dimov, D.; Low, F.; Ibrakhimov, M.; Schonbrodt-Stitt, S.; Conradl, C. Feature extraction and machine learning for the classification of active cropland in the Aral Sea Basin. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 1804–1807. [Google Scholar]
- Xiong, X.L.; Hu, Y.M.; Wen, N.; Liu, L.; Xie, J.W.; Lei, F.; Xiao, L.; Tang, T. Progress and prospect of cultivated land extraction research using remote sensing. J. Agric. Resour. Environ. 2020, 37, 856–865. [Google Scholar]
- Zhao, G.X.; Dou, Y.X.; Tian, W.X.; Zhang, Y.H. Study on automatic abstraction methods of cultivated land information from satellite remote sensing images. Geographic Sinica 2001, 21, 224–229. [Google Scholar]
- Tan, C.P.; Ewe, H.T.; Chuah, H.T. Agricultural crop-type classification of multi-polarization SAR images using a hybrid entropy decomposition and support vector machine technique. Int. J. Remote Sens. 2011, 32, 7057–7071. [Google Scholar] [CrossRef]
- Xu, P.; Xu, W.C.; Luo, Y.F.; Zhao, Z.X. Precise classification of cultivated land based on visible remote sensing image of UAV. J. Agric. Sci. Technol. 2019, 21, 79–86. [Google Scholar]
- Inglada, J.; Michel, J. Qualitative spatial reasoning for high resolution remote sensing image analysis. IEEE Trans. Geosci. Remote Sens. 2009, 47, 599–612. [Google Scholar] [CrossRef]
- Blaschke, T.; Hay, G.J.; Kelly, M.; Lang, S.; Hofmann, P.; Addink, E.; Feitosa, R.Q.; Van der Meer, F.; Van der Werff, H.; Van Coillie, F.; et al. Geographic Object-Based Image Analysis-Towards a new paradigm. ISPRS J. Photogramm. 2014, 87, 180–191. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhou, W.; Ming, D.P.; Yan, P.F. Cultivated Land Extraction Based on Image Region Division and Scale Estimation. J. Geo-Inf. Sci. 2018, 20, 1014–1025. [Google Scholar]
- Wu, Z.T.; Thenkabail, P.S.; Mueller, R.; Zakzeski, A.; Melton, F.; Johnson, L.; Rosevelt, C.; Dwyer, J.; Jones, J.; Verdin, J.P. Seasonal cultivated and fallow cropland mapping using the MODIS-based automated cropland classification algorithm. J. Appl. Remote Sens. 2014, 8, 397–398. [Google Scholar] [CrossRef] [Green Version]
- Xiong, J.; Thenkabail, P.S.; Gumma, M.K.; Teluguntla, P.; Poehnelt, J.; Congalton, R.G.; Yadav, K.; Thau, D. Automated cropland mapping of continental Africa using Google Earth Engine cloud computing. ISPRS J. Photogramm. 2017, 126, 225–244. [Google Scholar] [CrossRef] [Green Version]
- Graesser, J.; Ramankutty, N. Detection of cropland field parcels from Landsat imagery. Remote Sens. Environ. 2017, 201, 165–180. [Google Scholar] [CrossRef] [Green Version]
- Belgiu, M.; Csillik, O. Sentinel-2 cropland mapping using pixel-based and object-based time-weighted dynamic time warping analysis. Remote Sens. Environ. 2018, 204, 509–523. [Google Scholar] [CrossRef]
- Li, S.H.; Jin, B.X.; Zhou, J.S.; Wang, J.L.; Peng, S.Y. Analysis of the spatiotemporal land-use/land-cover change and its driving forces in Fuxian Lake Watershed, 1974 to 2014. Pol. J. Environ. Stud. 2017, 26, 671–681. [Google Scholar] [CrossRef]
- Li, C.J.; Huang, H.; Li, W. Research on agricultural remote sensing image cultivated land extraction technology based on support vector. Instrum. Technol. 2018, 11, 5-8+48. [Google Scholar]
- Zhang, Y.H.; Zhao, G.X. The Research on Farm Land Information Secondary Planet Remote Sensing Computer Automatic Extraction Techniques Using the ENVI Software. J. Sichuan Agric. Univ. 2000, 18, 170–172. [Google Scholar]
- NNiu, L.Y.; Zhang, X.Y.; Zheng, J.Y.; Cao, S.D.; Ruan, H.J. Extraction of Cultivated Land Information in Shandong Province Based on Landsat8 OLI Data. Chin. Agric. Sci. Bull. 2014, 30, 264–269. [Google Scholar]
- Xiao, G.F.; Zhu, X.F.; Hou, C.Y.; Xia, X.S. Extraction and analysis of abandoned farmland: A case study of Qingyun and Wudi counties in Shandong Province. Acta Geogr. Sin. 2018, 73, 1658–1673. [Google Scholar] [CrossRef] [Green Version]
- Mu, Y.X.; Wu, M.Q.; Niu, Z.; Huang, W.J.; Yang, J. Method of remote sensing extraction of cultivated land area under complex conditions in southern region. Remote Sens. Technol. Appl. 2020, 35, 1127–1135. [Google Scholar]
- Bouziani, M.; Goita, K.; He, D.C. Rule-based classification of a very high resolution image in an urban environment using multispectral segmentation guided by cartographic data. IEEE Trans. Geosci. Remote 2010, 48, 3198–3211. [Google Scholar] [CrossRef]
- Chen, J.; Chen, T.Q.; Liu, H.M.; Mei, X.M.; Shao, Q.B.; Deng, M. Hierarchical extraction of farmland from high-resolution remote sensing imagery. Trans. Chin. Soc. Agric. Eng. 2015, 31, 190–198. [Google Scholar]
- Li, P.; Yu, H.; Wang, P.; Li, K.Y. Comparison and analysis of agricultural information extraction methods based on GF2 satellite images. Bull. Surv. Mapp. 2017, 1, 48–52. [Google Scholar]
- Teluguntla, P.; Thenkabail, P.S.; Oliphant, A.; Xiong, J.; Gumma, M.K.; Congalton, R.G.; Yadav, K.; Huete, A. A 30-m landsat-derived cropland extent product of Australia and China using a random forest machine learning algorithm on Google Earth Engine cloud computing platform. ISPRS J. Photogramm. 2018, 144, 325–340. [Google Scholar] [CrossRef]
- Yang, Z.J.; Chen, X.; Yang, L.; Wang, W.S.; Cao, Q. Extraction method of cultivated land information based on remote sensing time series spectral reconstruction. Sci. Surv. Mapp. 2020, 45, 59–67. [Google Scholar]
- Zhou, X.; Wang, Y.B.; Liu, S.H.; Yu, P.X.; Wang, X.K. A machine learning algorithm for automatic identification of cultivated land in remote sensing images. Remote Sens. Land Res. 2018, 30, 68–73. [Google Scholar]
- Tian, L.J.; Song, W.L.; Lu, Y.Z.; Lü, J.; Li, H.X.; Chen, J. Rapid monitoring and classification of land use in agricultural areas by UAV based on the deep learning method. J. China Ins. W. Res. Hydropower Res. 2019, 17, 312–320. [Google Scholar]
- Li, S.; Peng, L.; Hu, Y.; Chi, T.H. FD-RCF -based boundary delineation of agricultural fields in high resolution remote sensing images. J. Univ. Chin. Acad. Sci. 2020, 37, 483–489. [Google Scholar]
- Hu, T.G.; Zhu, W.Q.; Yang, X.Q.; Pan, Y.Z.; Zhang, J.S. Farmland Parcel Extraction Based on High Resolution Remote Sensing Image. Spectrosc. Spect. Anal. 2009, 29, 2703–2707. [Google Scholar]
- Hu, X.; Li, X.J. Comparison of subsided cultivated land extraction methods in high-ground water-level coal mines based on unmanned aerial vehicle. J. China Coal Soc. 2019, 44, 3547–3555. [Google Scholar]
- Zhang, M.M.; Ge, Y.H.; Xue, Y.A.; Zhao, J.L. Identification of geomorphological hazards in an underground coal mining area based on an improved region merging watershed algorithm. Arab. J. Geosci. 2020, 13, 339. [Google Scholar] [CrossRef]
- Zhang, M.M.; Xue, Y.A.; Ge, Y.H.; Zhao, J.L. Watershed segmentation algorithm based on Luv color space region merging for extracting slope hazard boundaries. ISPRS Int. J. Geo-Inf. 2020, 9, 246. [Google Scholar] [CrossRef]
- Gai, J.D.; Ding, J.X.; Wang, D.; Xiao, Q.; Deng, J. Study on Extracting the Gearing Mesh Mark and Tooth Profile of Hypoid Gear based on Linear Gray Scale Transformation. J. Mech. Tx. 2011, 35, 27–30. [Google Scholar]
- Lin, F.Z. Foundation of Multimedia Technology, 3rd ed.; Tsinghua University Press: Beijing, China, 2009; pp. 104–106. [Google Scholar]
- Vincent, L.; Soille, P. Watersheds in digital spaces: An efficient algorithm based on immersion simulations. Comput. Archit. Lett. 1991, 13, 583–598. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Pan, M.; Wu, Z.X. An improved segmentation of high spatial resolution remote sensing image using marker-based watershed algorithm. In Proceedings of the 20th International Conference on Geoinformatics, Hong Kong, China, 15–17 June 2012. [Google Scholar]
- Wang, Y. Adaptive marked watershed segmentation algorithm for red blood cell images. J. Image Graph. 2018, 22, 1779–1787. [Google Scholar]
- Jia, X.Y.; Jia, Z.H.; Wei, Y.M.; Liu, L.Z. Watershed segmentation by gradient hierarchical reconstruction under opponent color space. Comput. Sci. 2018, 45, 212–217. [Google Scholar]
- Yasnoff, W.A.; Mui, J.K.; Bacus, J.W. Error measures for scene segmentation. Pattern Recogn. 1977, 9, 217–231. [Google Scholar] [CrossRef]
- Dorren, L.K.A.; Maier, B.; Seijmonsbergen, A.C. Improved Landsat-based forest mapping in steep mountainous terrain using object-based classification. For. Ecol. Manag. 2003, 183, 31–46. [Google Scholar] [CrossRef]
- Ming, D.P.; Luo, J.C.; Zhou, C.H.; Wang, J. Research on high resolution remote sensing image segmentation methods based on features and evaluation of algorithms. Geo-Inform. Sci. 2006, 8, 107–113. [Google Scholar]
- Chen, Y.Y.; Ming, D.P.; Xu, L.; Zhao, L. An overview of quantitative experimental methods for segmentation evaluation of high spatial remote sensing images. J. Geo-Inform. Sci. 2017, 19, 818–830. [Google Scholar]
- Huang, Q.; Dom, B. Quantitative methods of evaluating image segmentation. In Proceedings of the International Conference on Image Processing, Washington, DC, USA, 23–26 October 1995. [Google Scholar]
- Jozdani, S.; Chen, D.M. On the versatility of popular and recently proposed supervised evaluation metrics for segmentation quality of remotely sensed images: An experimental case study of building extraction. ISPRS J. Photogramm. 2020, 160, 275–290. [Google Scholar] [CrossRef]
- Debelee, T.G.; Schwenker, F.; Rahimeto, S.; Yohannes, D. Evaluation of modified adaptive k-means segmentation algorithm. Comput. Vis. Media 2019, 5, 347–361. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Fritts, J.E.; Goldman, S.A. Image segmentation evaluation: A survey of unsupervised methods. Comput. Vis. Image Underst. 2008, 110, 260–280. [Google Scholar] [CrossRef] [Green Version]
- Zhu, C.J.; Yang, S.Z.; Cui, S.C.; Cheng, W.; Cheng, C. Accuracy evaluating method for object-based segmentation of high resolution remote sensing image. High. Power Laser Part Beams 2015, 27, 37–43. [Google Scholar]
- Hoover, A.; Jean-Baptiste, G.; Jiang, X.Y.; Flynn, P.J.; Bunke, H.; Goldgof, D.; Bowyer, K.; Eggert, D.W.; Fitzgibbon, A.; Fisher, R. An experimental comparison of range image segmentation algorithms. IEEE Trans. Pattern Anal. Mach. Intell. 1996, 18, 673–689. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.C.; Wang, S.J. The use of visible color difference in the quantitative evaluation of color image segmentation. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Montreal, QC, Canada, 17–21 May 2004. [Google Scholar]
- Hay, G.J.; Castilla, G.; Wulder, M.A.; Ruiz, J.R. An automated object-based approach for the multiscale image segmentation of forest scenes. Int. J. Appl. Earth Observ. 2005, 7, 339–359. [Google Scholar] [CrossRef]
- Cardoso, J.S.; Corte-Real, L. Toward a generic evaluation of image segmentation. IEEE Trans. Image Process. 2005, 14, 1773–1782. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hofmann, P.; Lettmayer, P.; Blaschke, T.; Belgiu, M.; Wegenkittl, S.; Graf, R.; Lampoltshammer, T.J.; Andrejchenko, V. Towards a framework for agent-based image analysis of remote-sensing data. Int. J. Image Data Fusion 2015, 6, 115–137. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.L.; Feng, X.Z.; Xiao, P.F.; He, G.J.; Zhu, L.J. Segmentation quality evaluation using region-based precision and recall measures for remote sensing images. ISPRS J. Photogramm. 2015, 102, 73–84. [Google Scholar] [CrossRef]
- Wei, X.W.; Zhang, X.F.; Xue, Y. Remote sensing image segmentation quality assessment based on spectrum and shape. J. Geo-Inform. Sci. 2018, 20, 1489–1499. [Google Scholar]
- Li, Z.Y.; Ming, D.P.; Fan, Y.L.; Zhao, L.F.; Liu, S.M. Comparison of evaluation indexes for supervised segmentation of remote sensing imagery. J. Geo-Inform. Sci. 2019, 21, 1265–1274. [Google Scholar]
- Huang, T.; Bai, X.F.; Zhuang, Q.F.; Xu, J.H. Research on Landslides Extraction Based on the Wenchuan Earthquake in GF-1 Remote Sensing Image. Bull. Surv. Mapp. 2018, 2, 67–71. [Google Scholar]
- Li, Q.; Zhang, J.F.; Luo, Y.; Jiao, Q.S. Recognition of earthquake-induced landslide and spatial distribution patterns triggered by the Jiuzhaigou earthquake in August 8, 2017. J. Remote Sens. 2019, 23, 785–795. [Google Scholar]
- Samarasinha, N.H.; Larson, S.M. Image enhancement techniques for quantitative investigations of morphological features in cometary comae: A comparative study. Icarus 2014, 239, 168–185. [Google Scholar] [CrossRef] [Green Version]
- Alberto, L.C.; Erik, C.; Marco, P.C.; Fernando, F.; Arturo, V.G.; Ram, S. Moth Swarm Algorithm for Image Contrast Enhancement. Knowl-Based Syst. 2020, 212, 106607. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | 1 m Resolution Panchromatic/4 m Resolution Multispectral Camera | |
|---|---|---|
| Spectral range | panchromatic | 0.45–0.90 μm |
| multispectral | 0.45–0.52 μm | |
| 0.52–0.59 μm | ||
| 0.63–0.69 μm | ||
| 0.77–0.89 μm | ||
| Spatial resolution | panchromatic | 1 m |
| multispectral | 4 m | |
| Width | 45 km (Two cameras combined) | |
| Revisit period | 5 days | |
| Method | Experiment Image | Patch number of Simulated Immersion Algorithm | Time of Watershed Segmentation (s) | Number of Patches after Region Merging | Time of Area Merging (s) | C | D |
|---|---|---|---|---|---|---|---|
| RGB-RMWS | Original | 14,389 | 0.063 | 133 | 4.578 | 2000 | 1000 |
| Contrast-enhanced | 14,760 | 0.062 | 139 | 2.734 | 2000 | 1000 | |
| Lab-RMWS | Original | 14,389 | 0.062 | 76 | 4.375 | 1900 | 40 |
| Contrast-enhanced | 14,760 | 0.063 | 92 | 1.750 | 1900 | 40 | |
| Luv-RMWS | Original | 14,389 | 0.062 | 91 | 2.125 | 2000 | 40 |
| Contrast-enhanced | 14,760 | 0.063 | 117 | 1.906 | 2000 | 40 |
| Experiment Image | Method | Number of Sliver Polygons after Region Merging | C | D |
|---|---|---|---|---|
| Contrast-enhanced | RGB-RMWS | 38 | 100 | 100 |
| 3 | 100 | 15,000 | ||
| 2421 | 15,000 | 100 | ||
| 44 | 15,000 | 15,000 | ||
| Lab-RMWS | 20 | 100 | 10 | |
| 4 | 100 | 500 | ||
| 524 | 5000 | 10 | ||
| 58 | 5000 | 500 | ||
| Luv-RMWS | 26 | 100 | 10 | |
| 4 | 100 | 500 | ||
| 655 | 5000 | 10 | ||
| 56 | 5000 | 500 |
| Method | Running Time (s) | C | D | Note |
|---|---|---|---|---|
| RGB-RMWS | 2.796 | 2000 | 1000 | All the three methods can perform automatic image segmentation and merging. |
| Lab-RMWS | 1.813 | 1900 | 40 | |
| Luv-RMWS | 1.969 | 2000 | 40 |
| Criterion | Indicator | RGB-RMWS | Lab-RMWS | Luv-RMWS |
|---|---|---|---|---|
| Area relative error | δA | 10.27% | 2.37% | 4.54% |
| Pixel quantity error | δP | 9.16% | 3.48% | 4.61% |
| Consistency | Khat | 77.86% | 90.96% | 88.31% |
| Method | Number of Sliver Polygons Using the Simulated Immersion Algorithm | Time of Watershed Segmentation (s) | Number of Sliver Polygons after Region Merging | Time of Region Merging (s) | C | D |
|---|---|---|---|---|---|---|
| RGB-RMWS | 53,710 | 0.687 | 318 | 14.961 | 2000 | 1000 |
| Lab-RMWS | 53,710 | 0.687 | 316 | 8.252 | 1900 | 40 |
| Luv-RMWS | 53,710 | 0.687 | 378 | 8.908 | 2000 | 40 |
| Criterion | Indicator | RGB-RMWS | Lab-RMWS | Luv-RMWS |
|---|---|---|---|---|
| Area relative error | δA | 14.09% | 5.15% | 7.55% |
| Pixel quantity error | δP | 9.71% | 4.44% | 6.20% |
| Consistency | Khat | 80.12% | 90.62% | 86.99% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, Y.; Zhao, J.; Zhang, M. A Watershed-Segmentation-Based Improved Algorithm for Extracting Cultivated Land Boundaries. Remote Sens. 2021, 13, 939. https://doi.org/10.3390/rs13050939
Xue Y, Zhao J, Zhang M. A Watershed-Segmentation-Based Improved Algorithm for Extracting Cultivated Land Boundaries. Remote Sensing. 2021; 13(5):939. https://doi.org/10.3390/rs13050939
Chicago/Turabian StyleXue, Yongan, Jinling Zhao, and Mingmei Zhang. 2021. "A Watershed-Segmentation-Based Improved Algorithm for Extracting Cultivated Land Boundaries" Remote Sensing 13, no. 5: 939. https://doi.org/10.3390/rs13050939
APA StyleXue, Y., Zhao, J., & Zhang, M. (2021). A Watershed-Segmentation-Based Improved Algorithm for Extracting Cultivated Land Boundaries. Remote Sensing, 13(5), 939. https://doi.org/10.3390/rs13050939