
GPR Monitoring of Artificial Debonded Pavement Structures throughout Its Life Cycle during Accelerated Pavement Testing

 ,
,
Abstract
1. Introduction
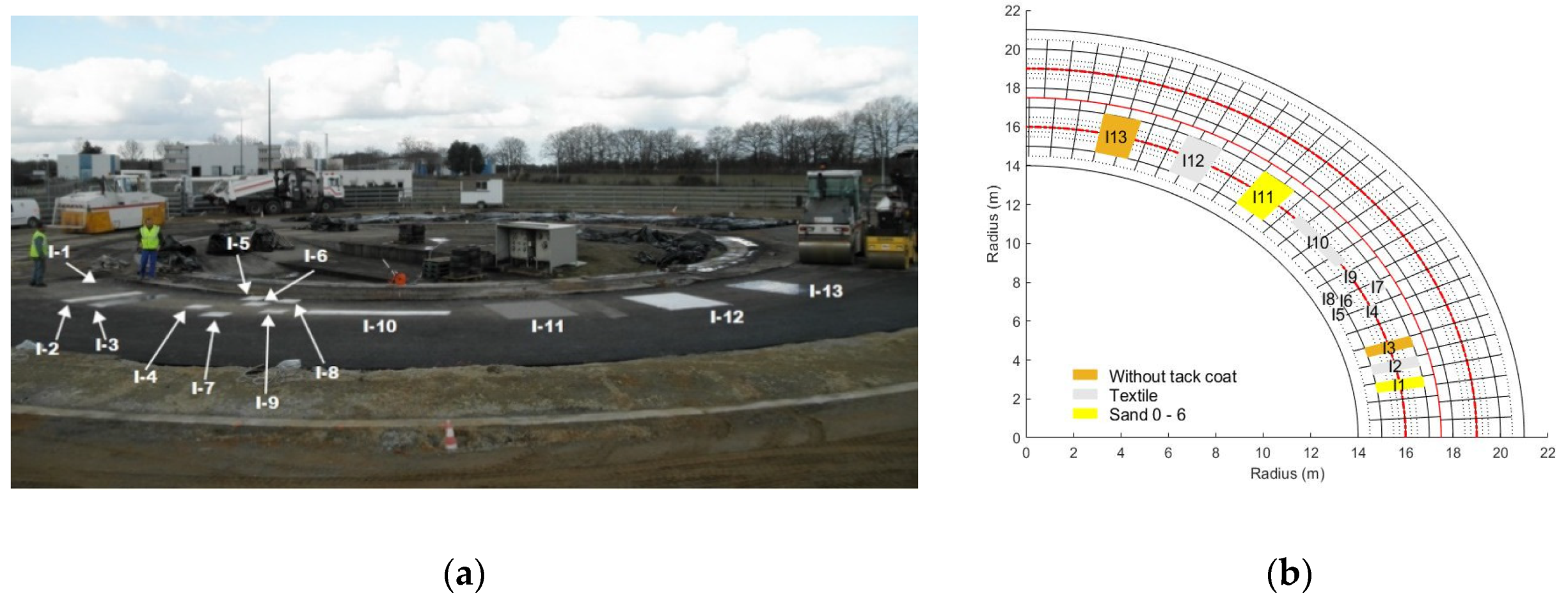
2. Design of the Accelerated Pavement Testing
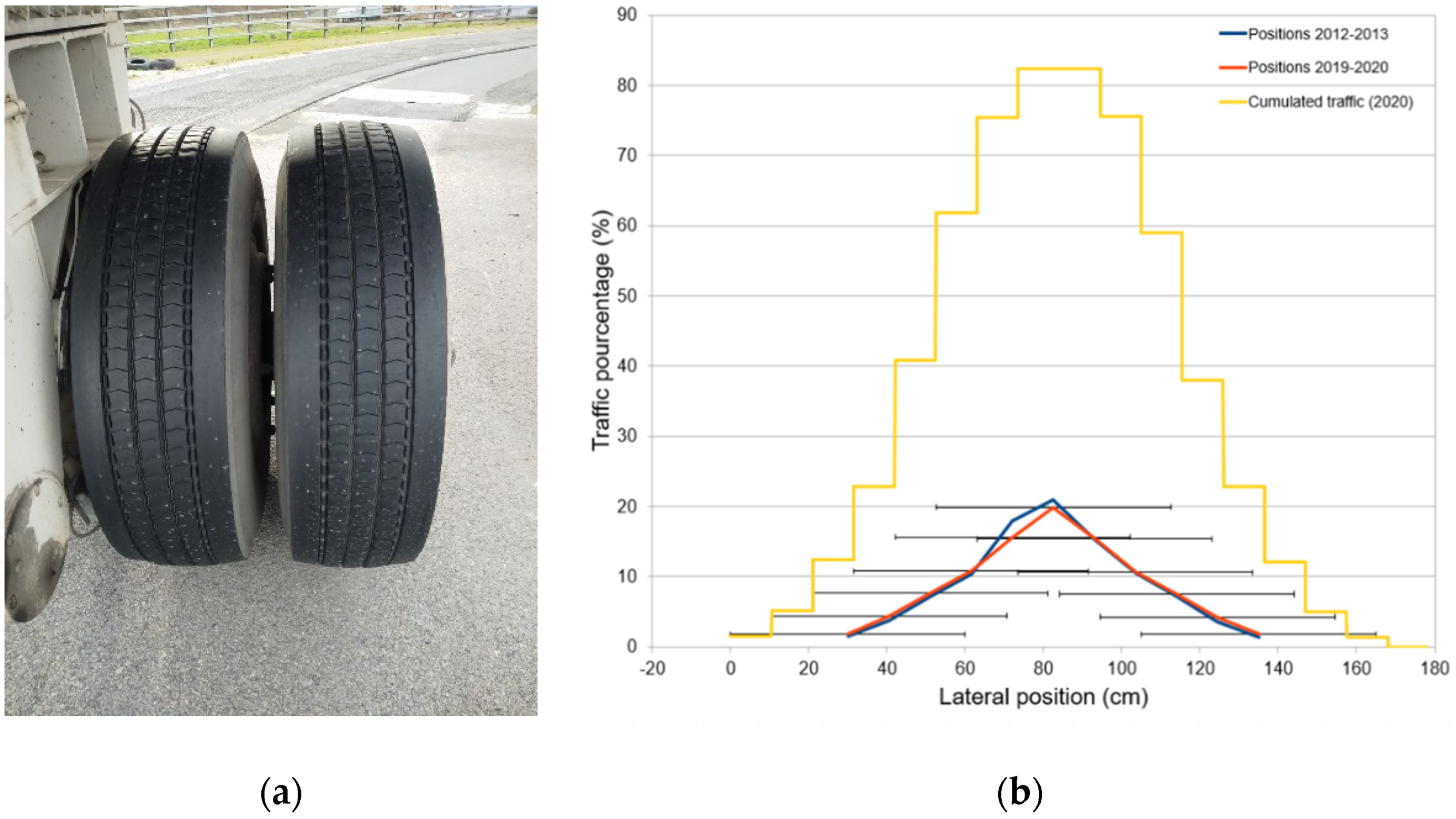
2.1. The Fatigue Carrousel
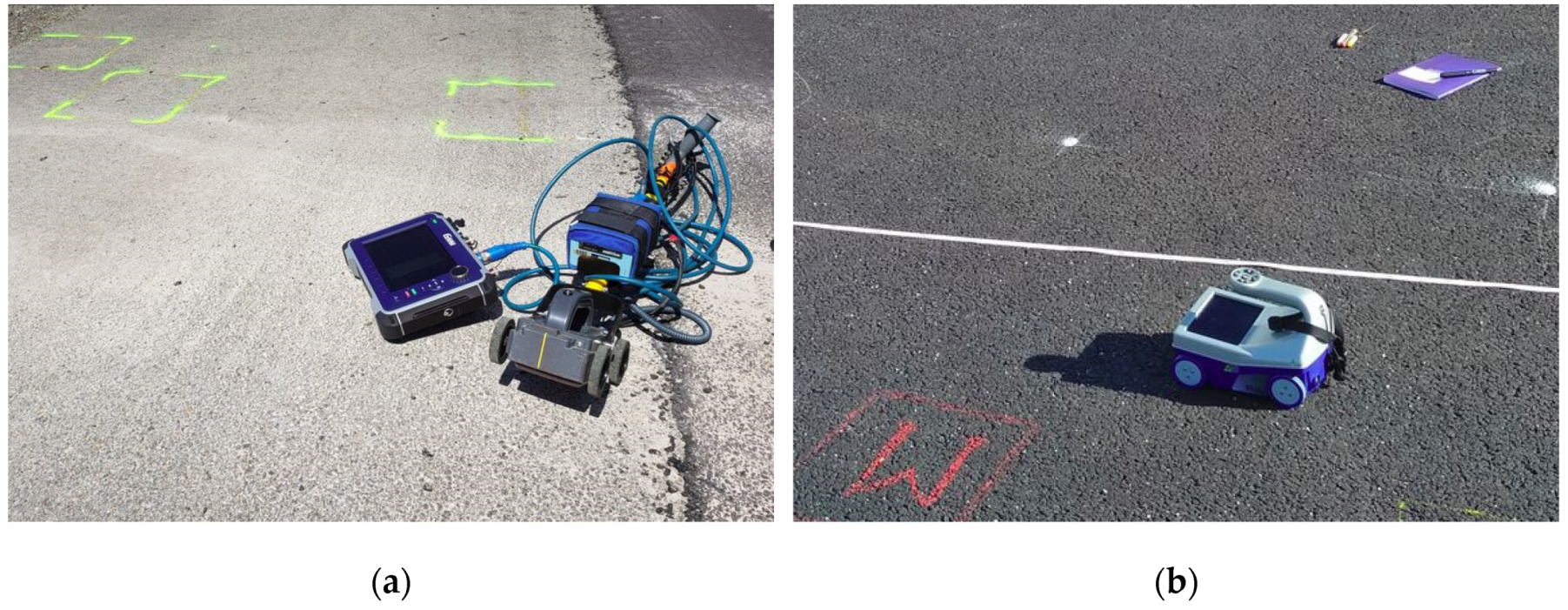
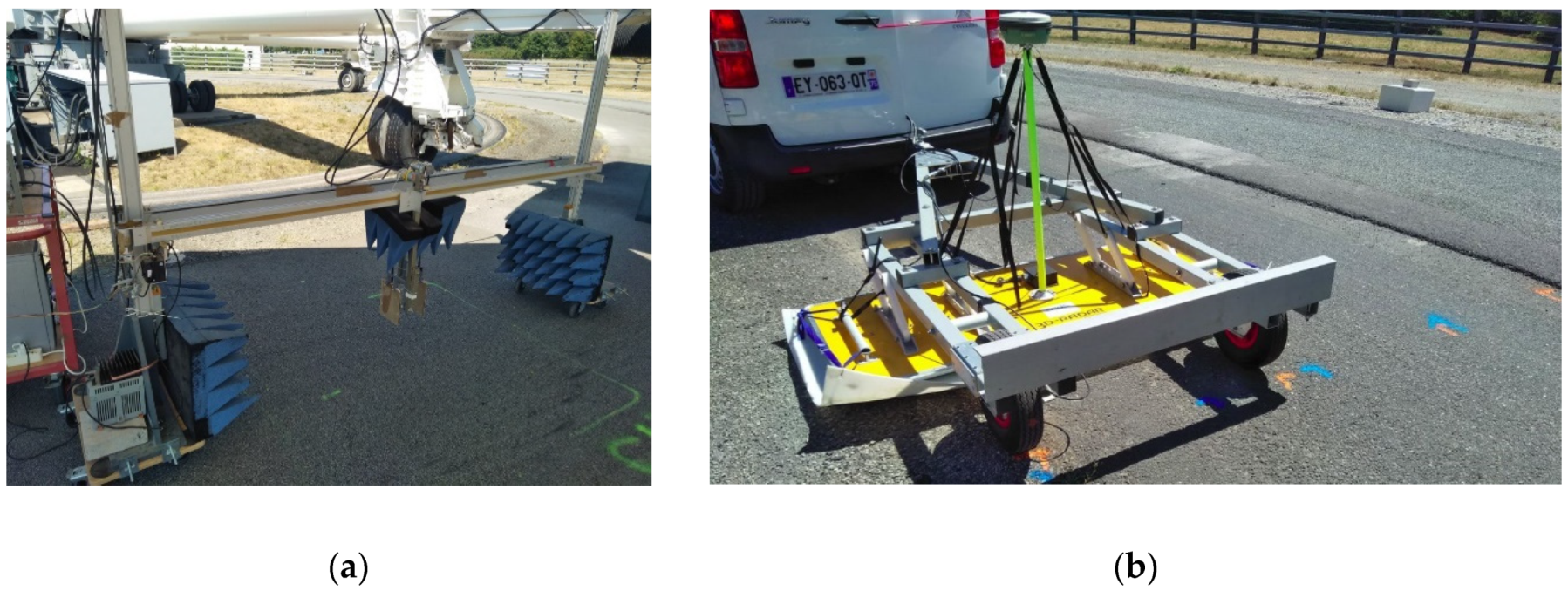
2.2. GPR Systems
2.3. Acquisition and Processing Methodologies
2.4. State of the Road Section at the End of the Experiment
3. GPR results
3.1. Introduction
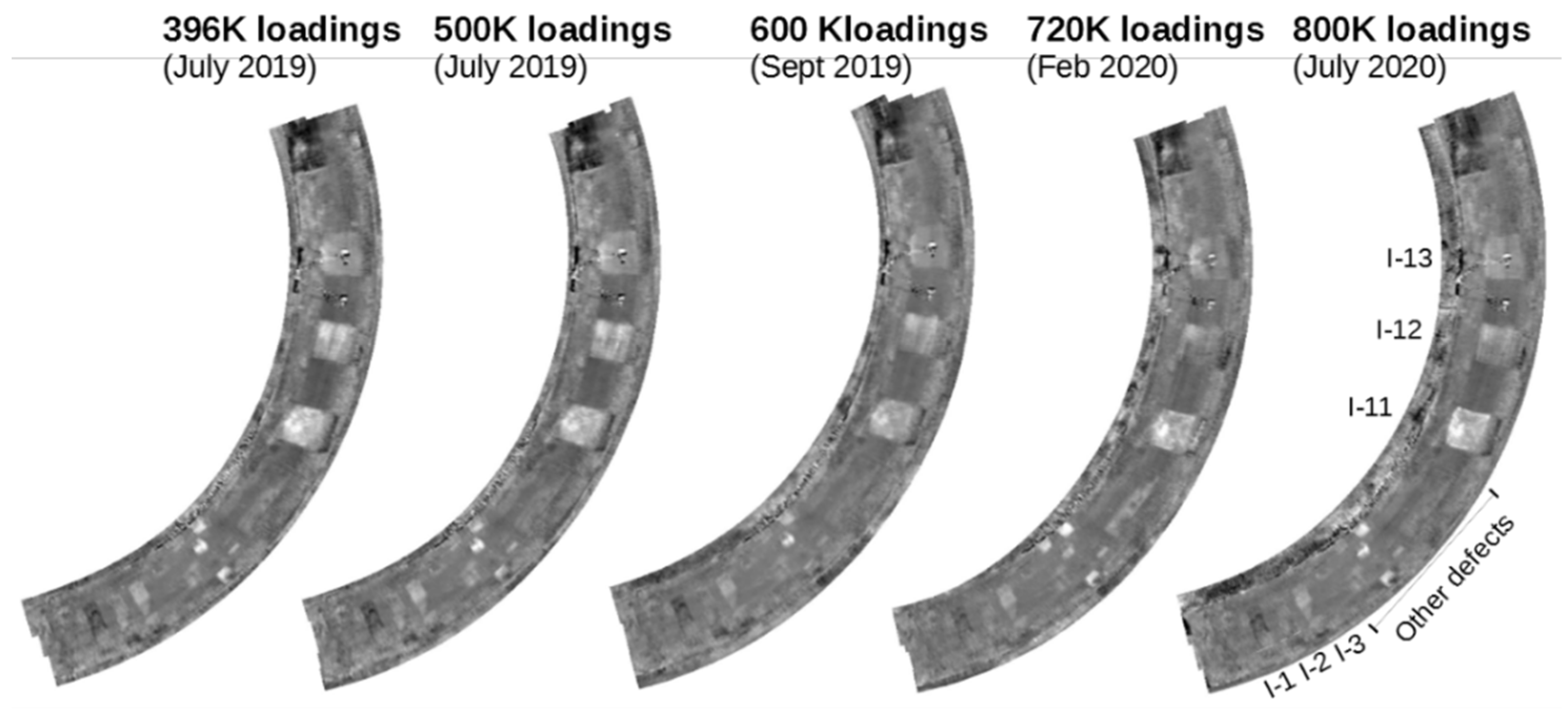
3.2. GPR Amplitude Maps
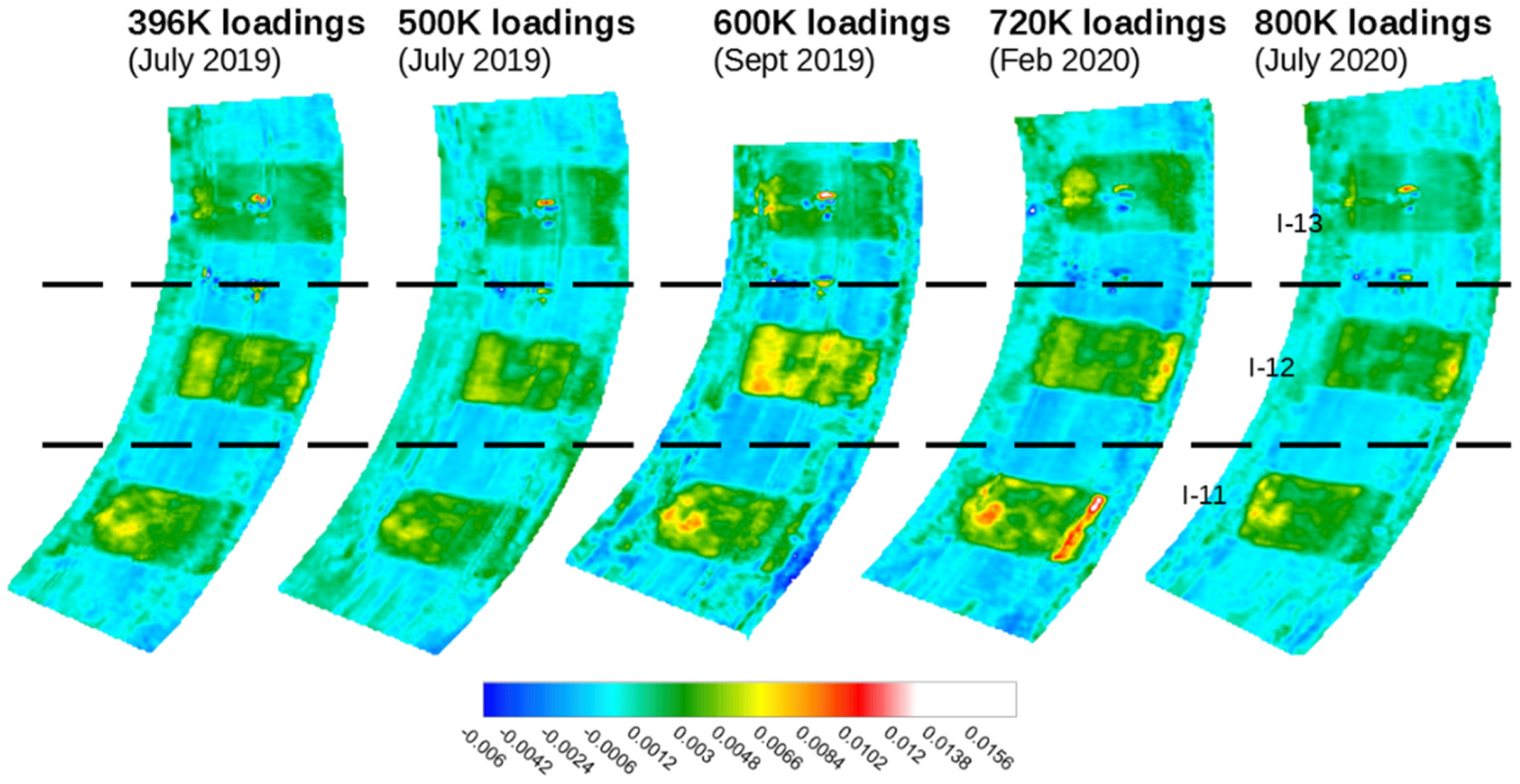
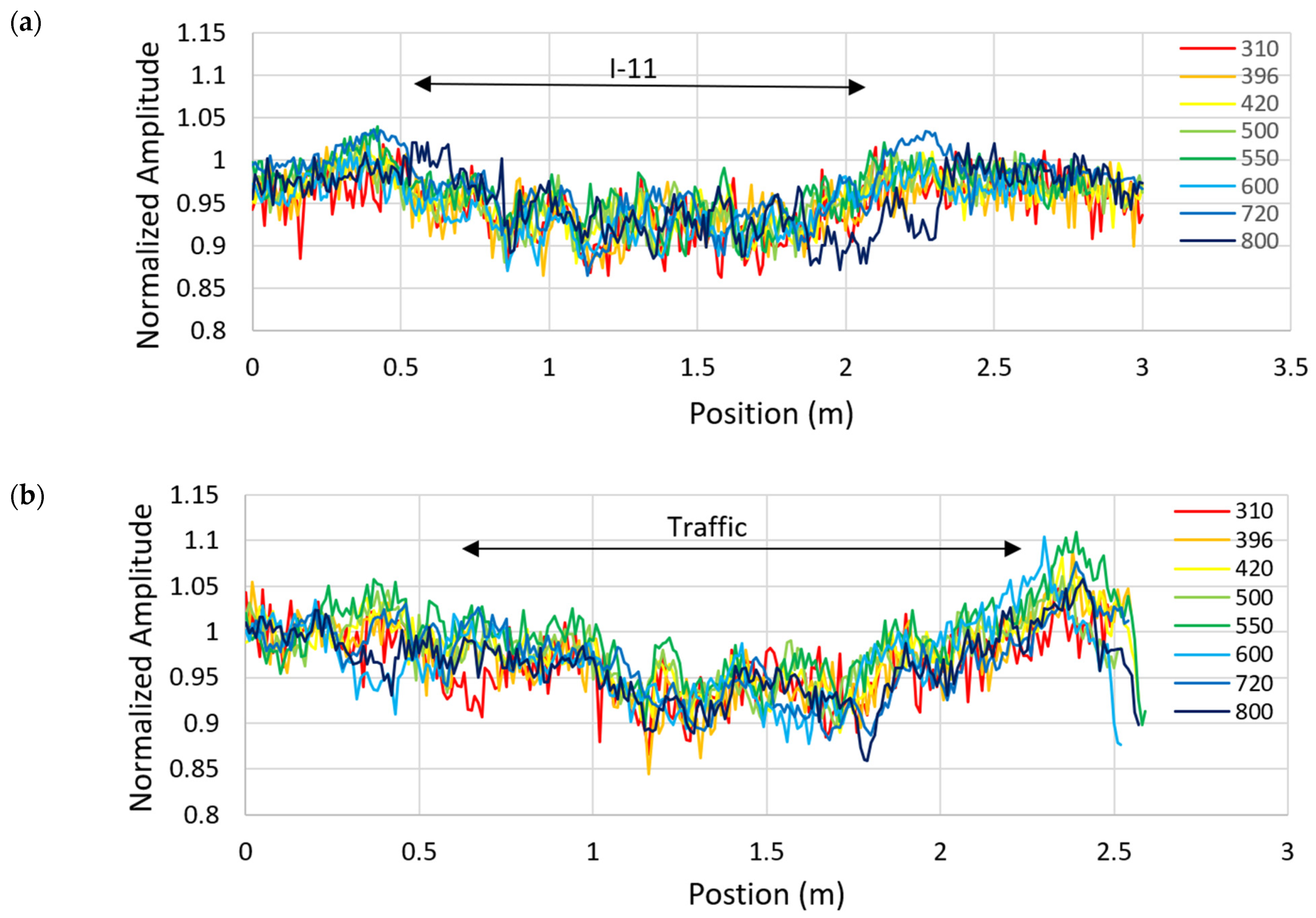
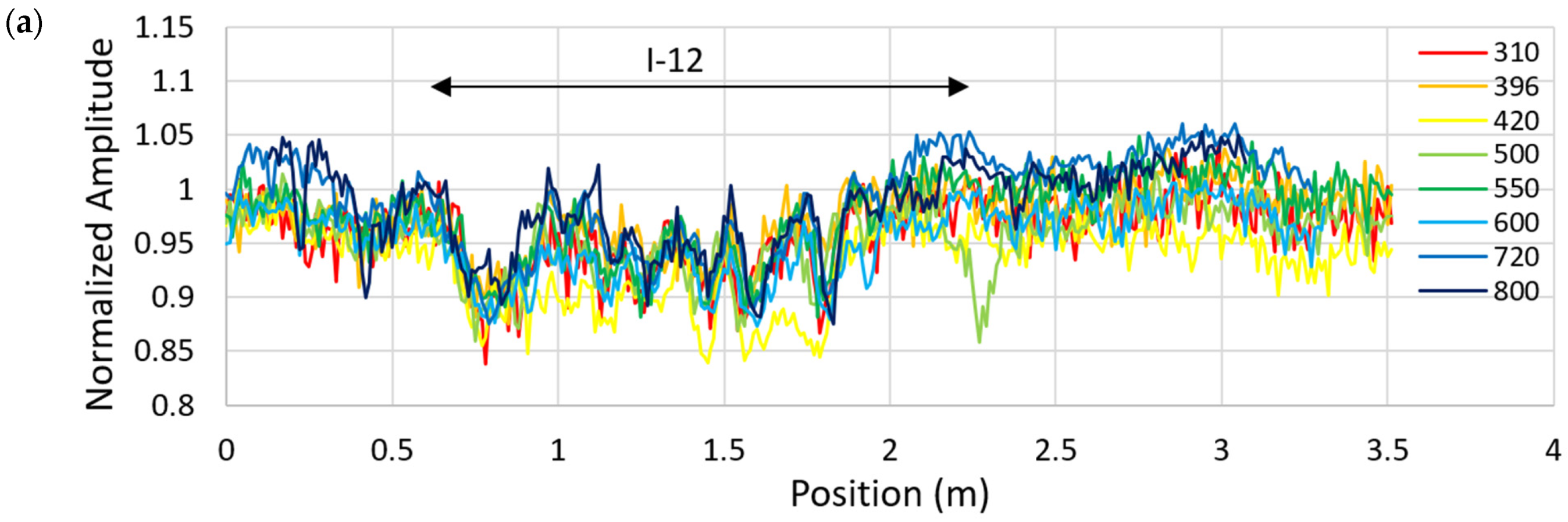
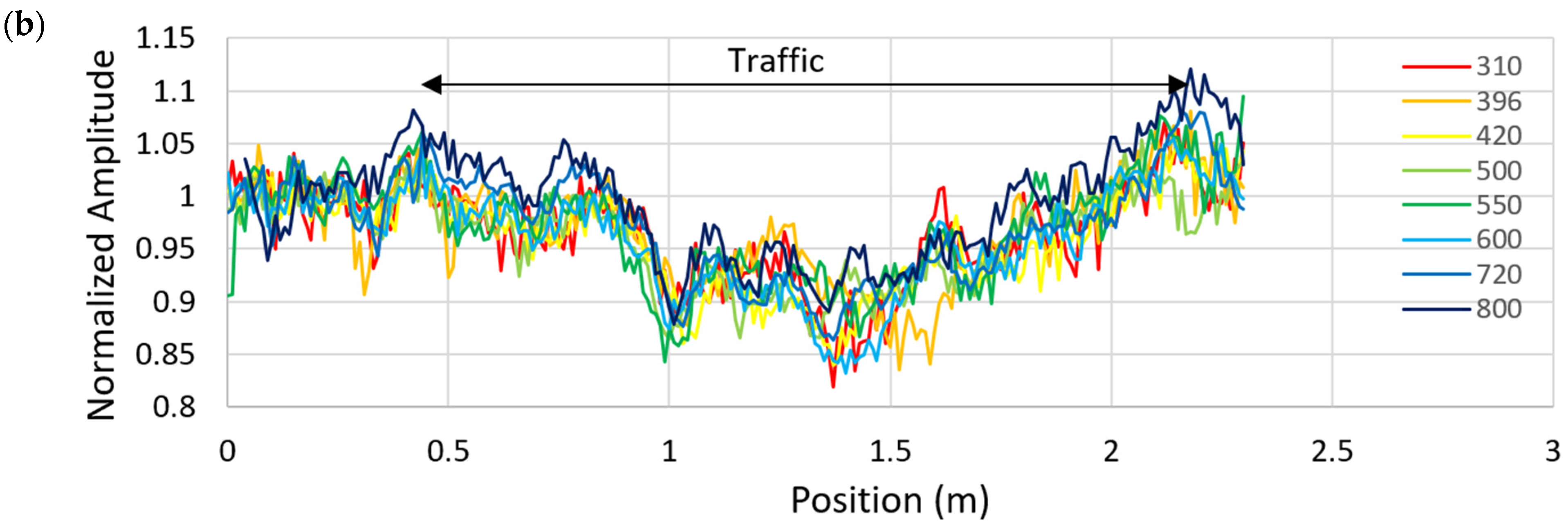
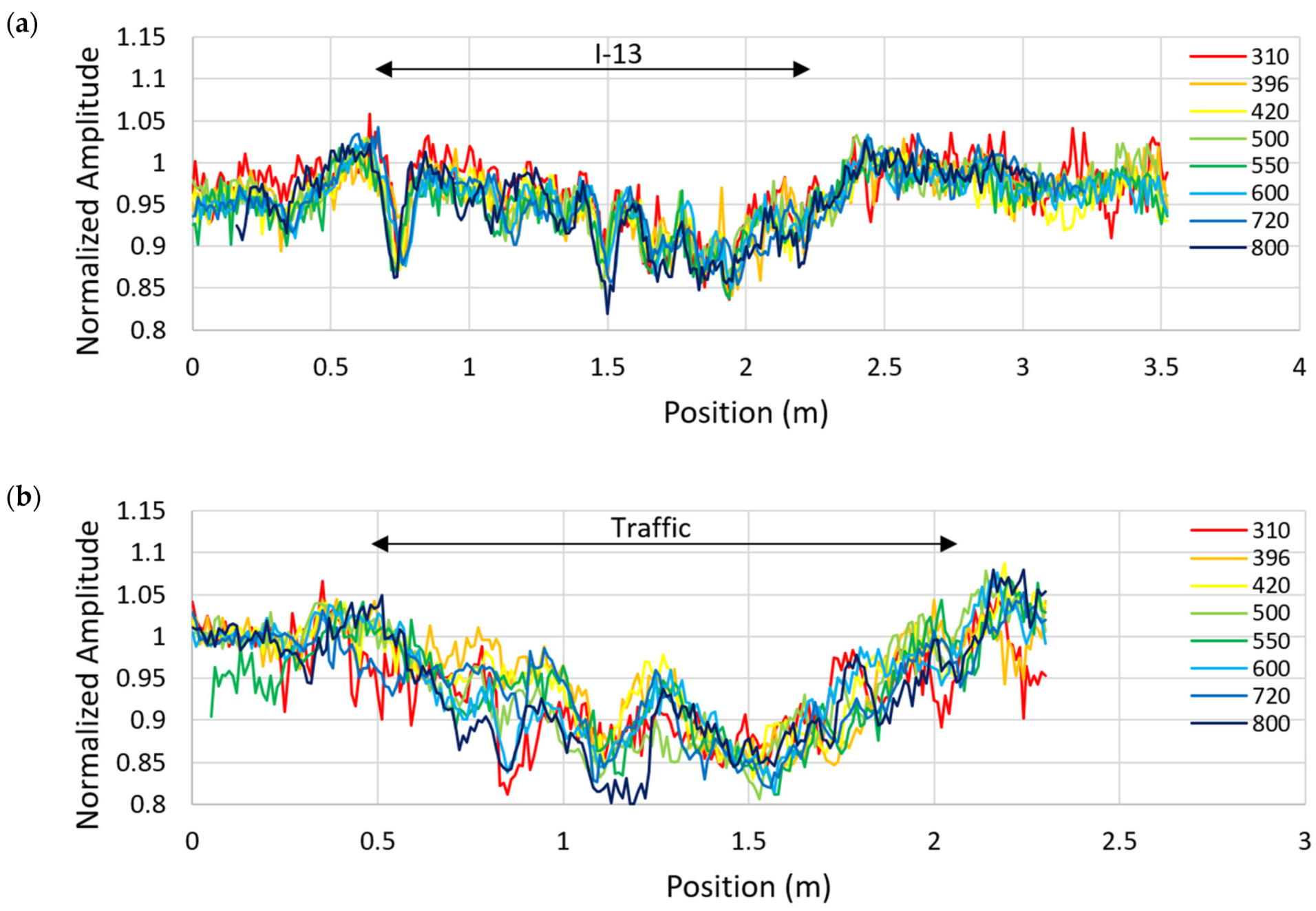
3.3. Study of the Largest Defects I-11 to I-13
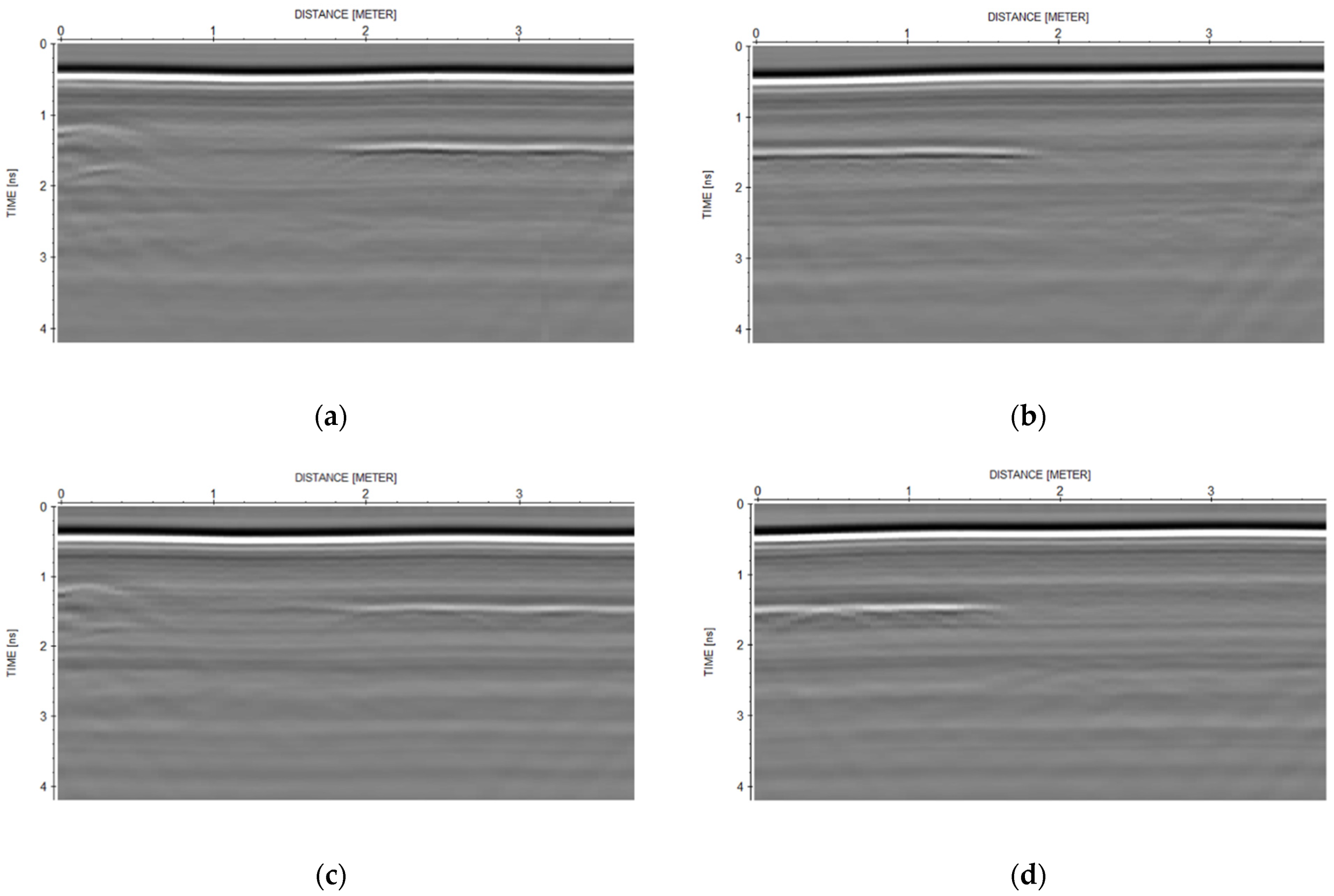
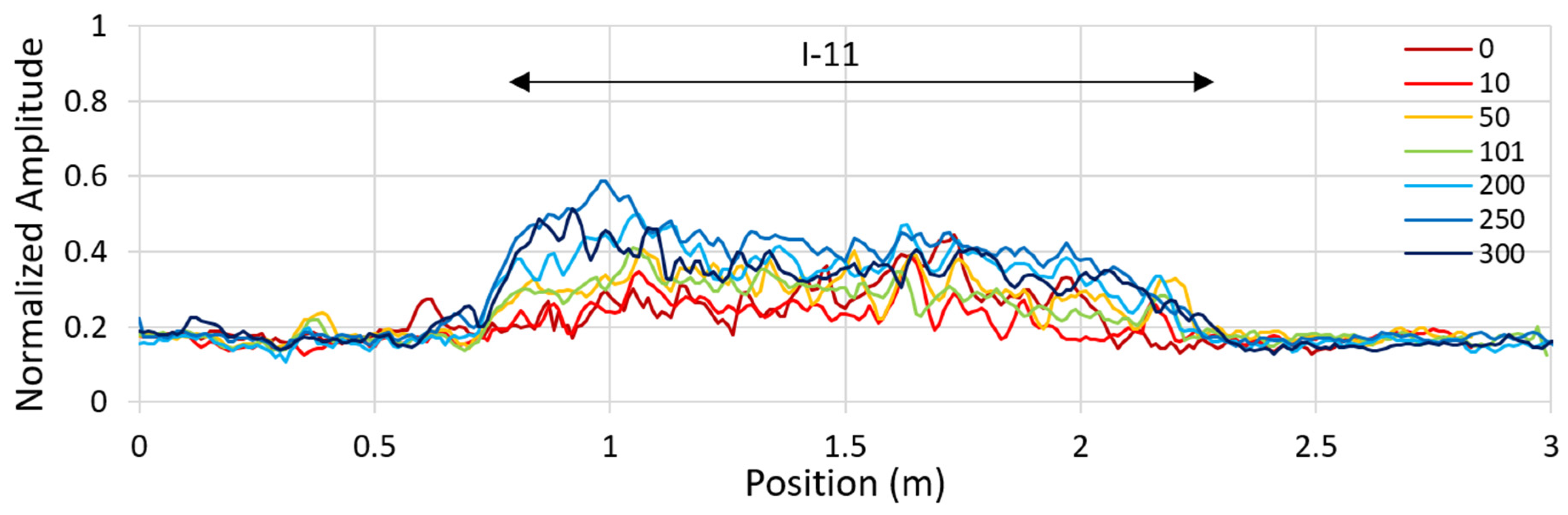
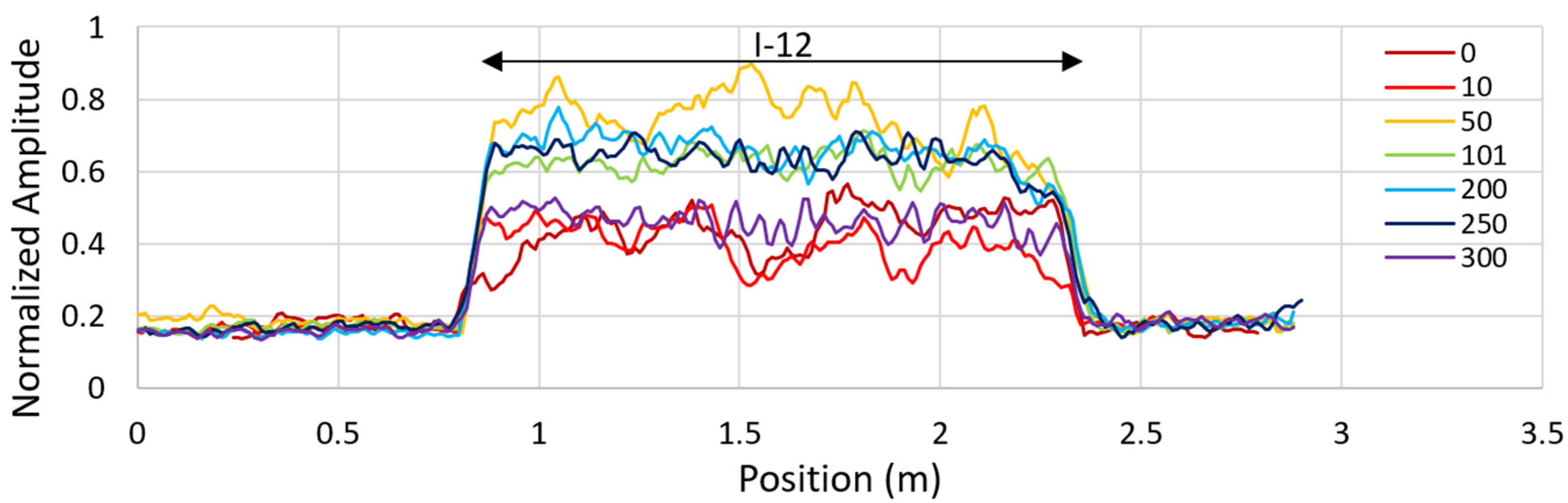
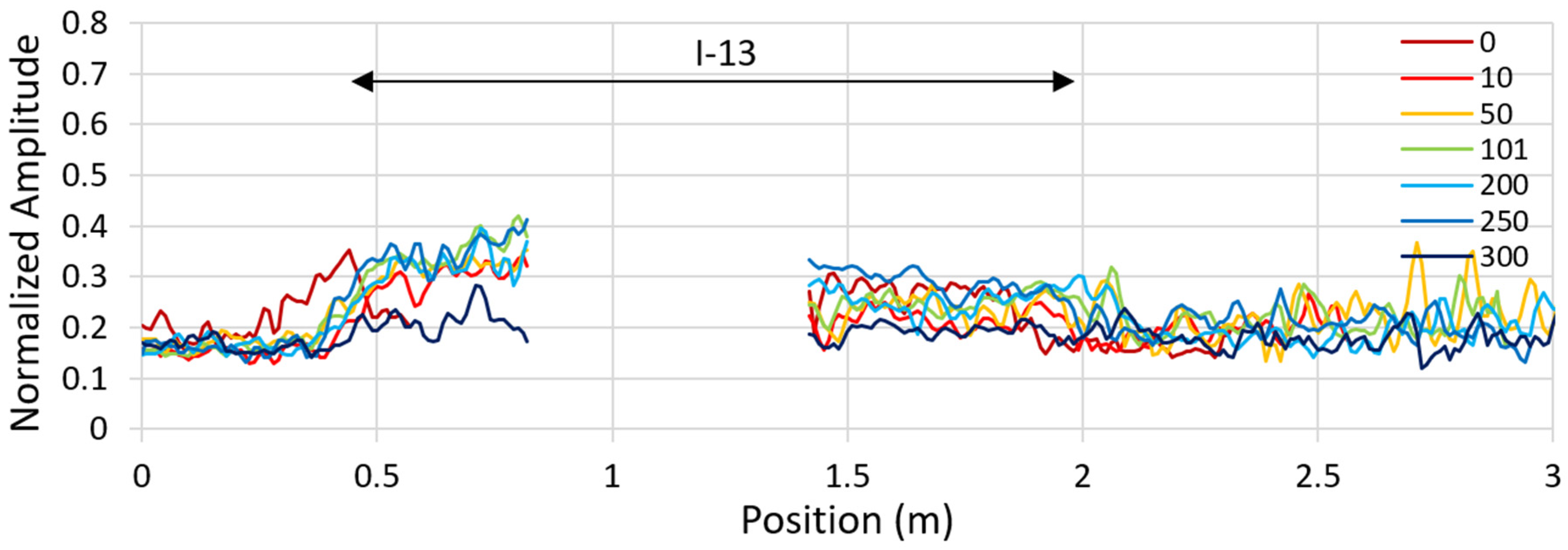
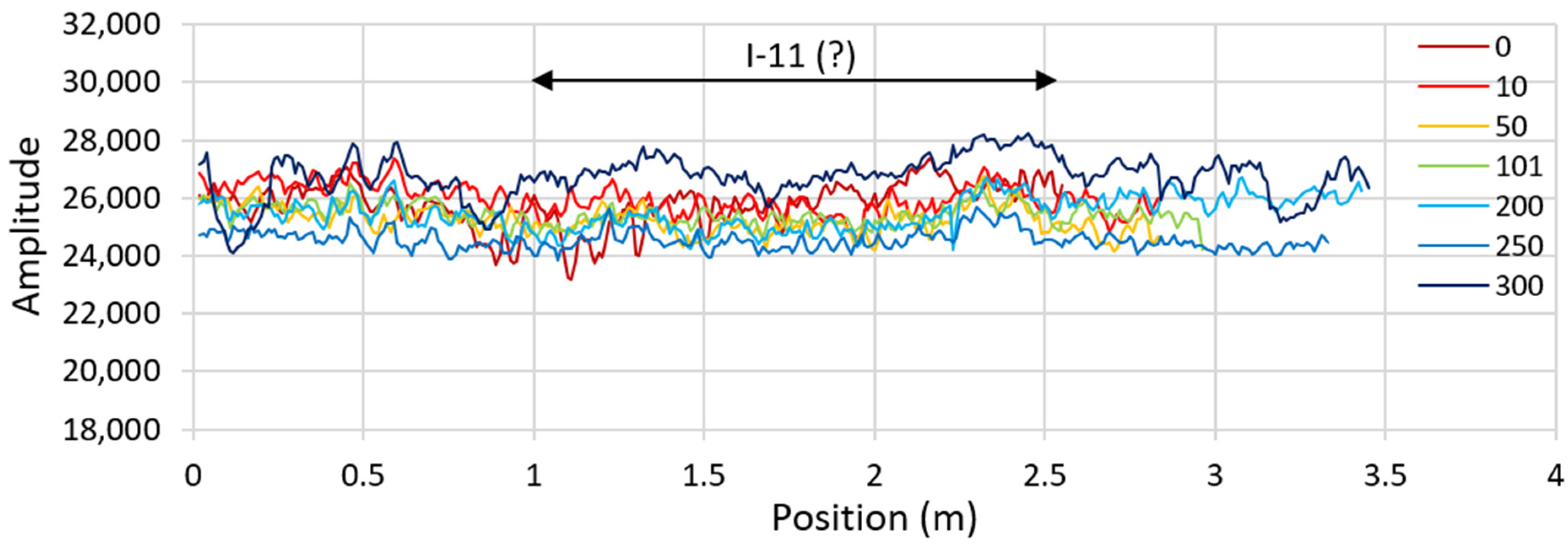
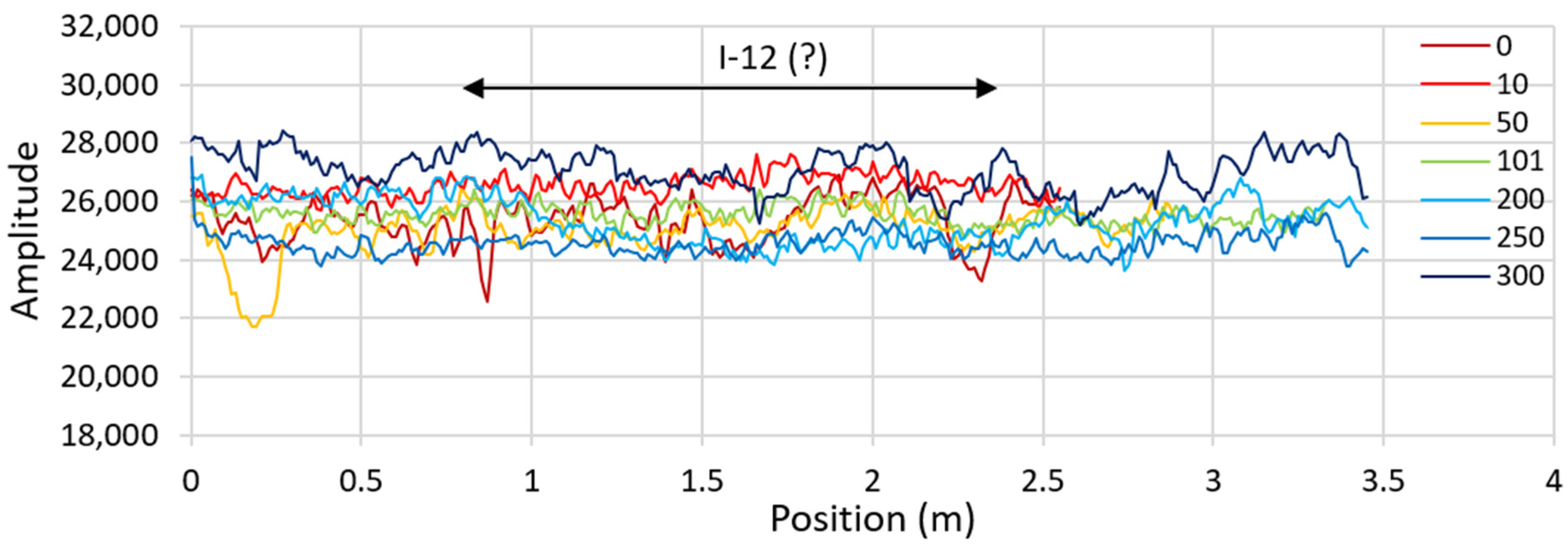
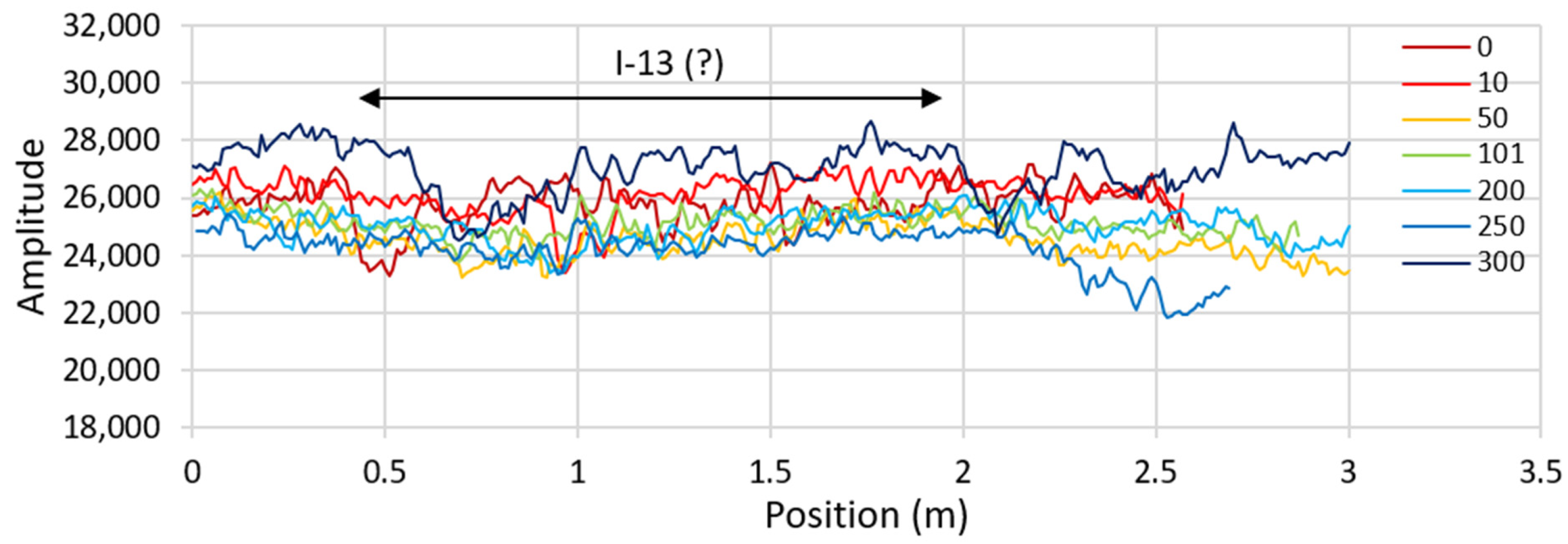
3.3.1. Study of Defects I-11 to I-13 at 2.6 GHz
- -
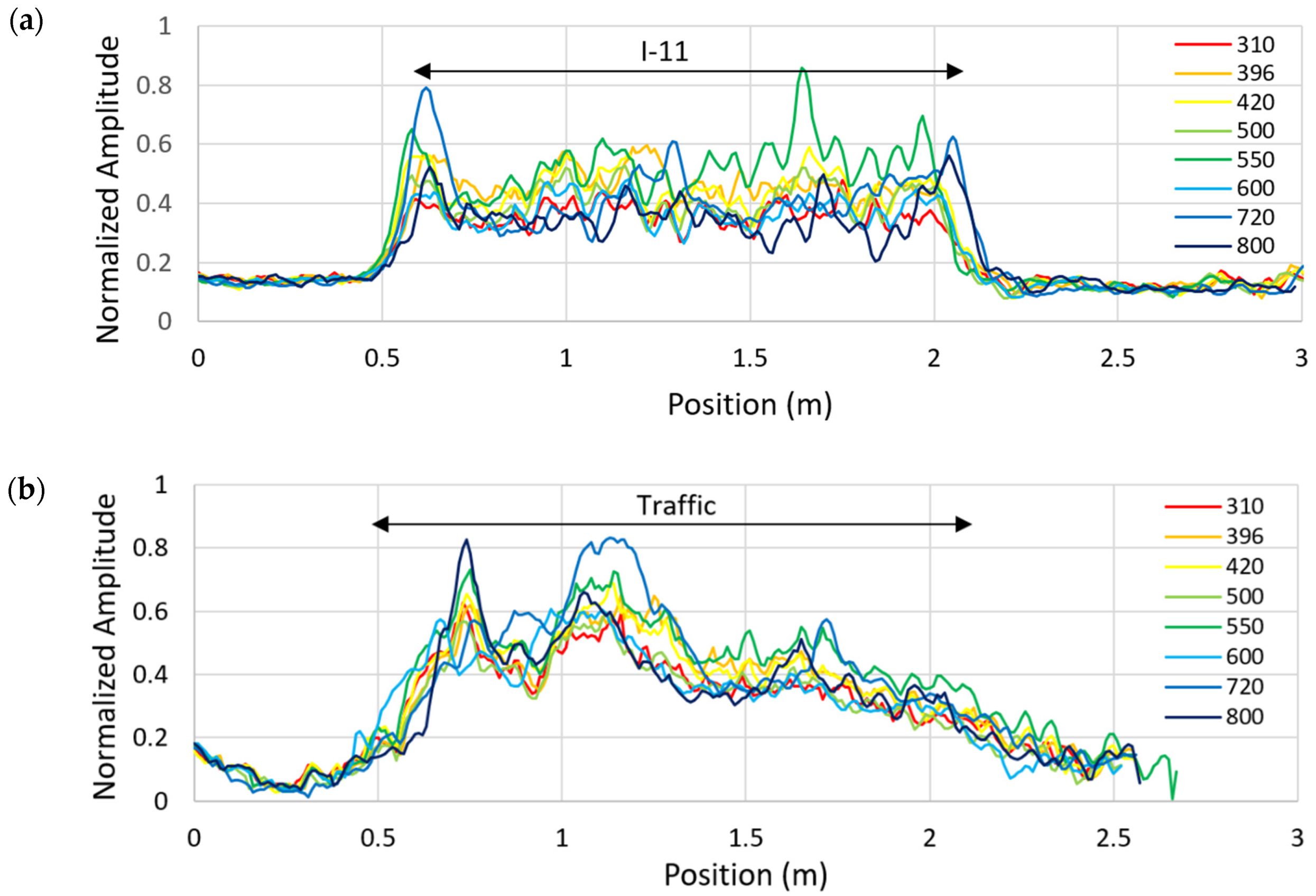
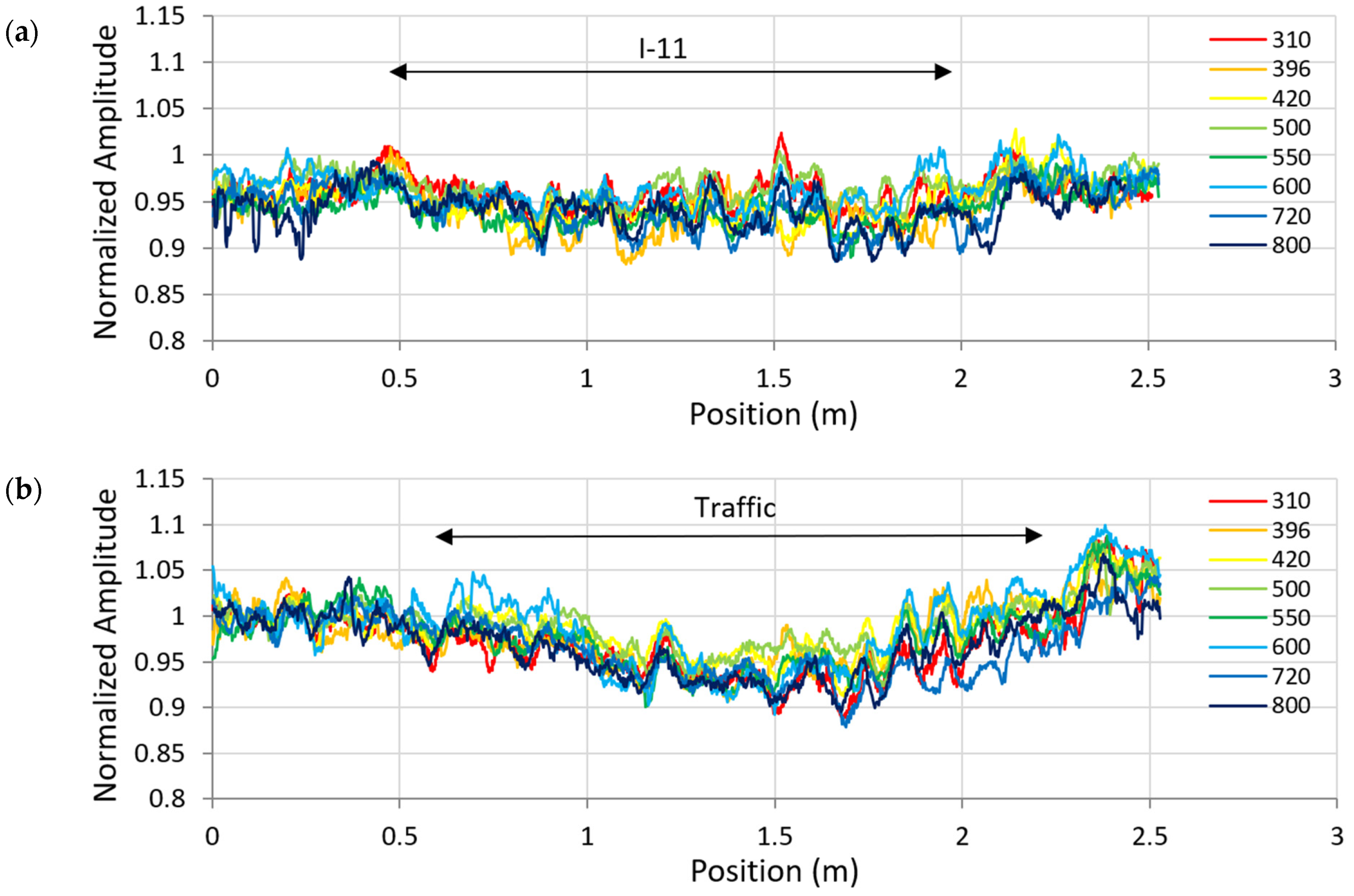
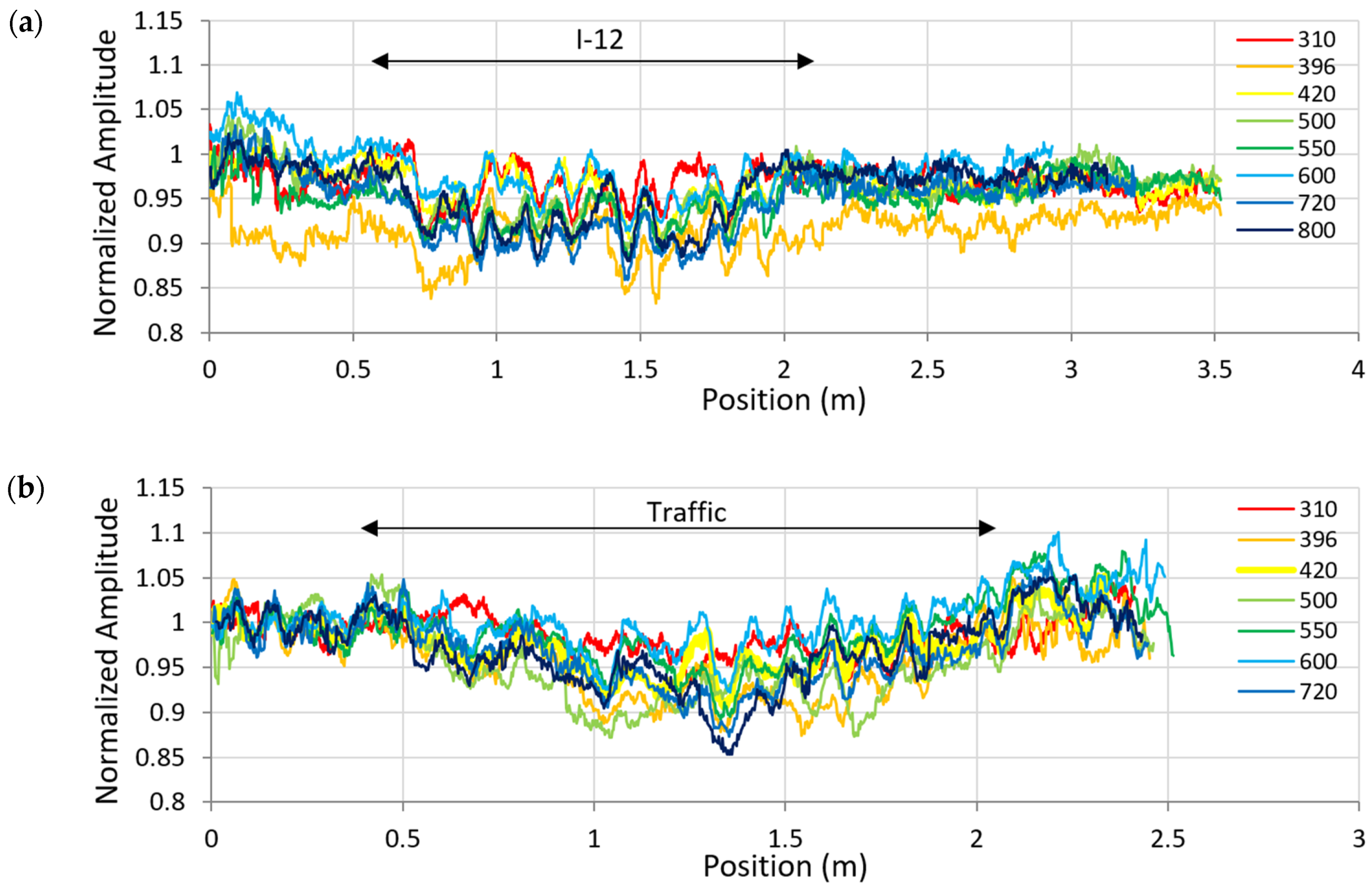
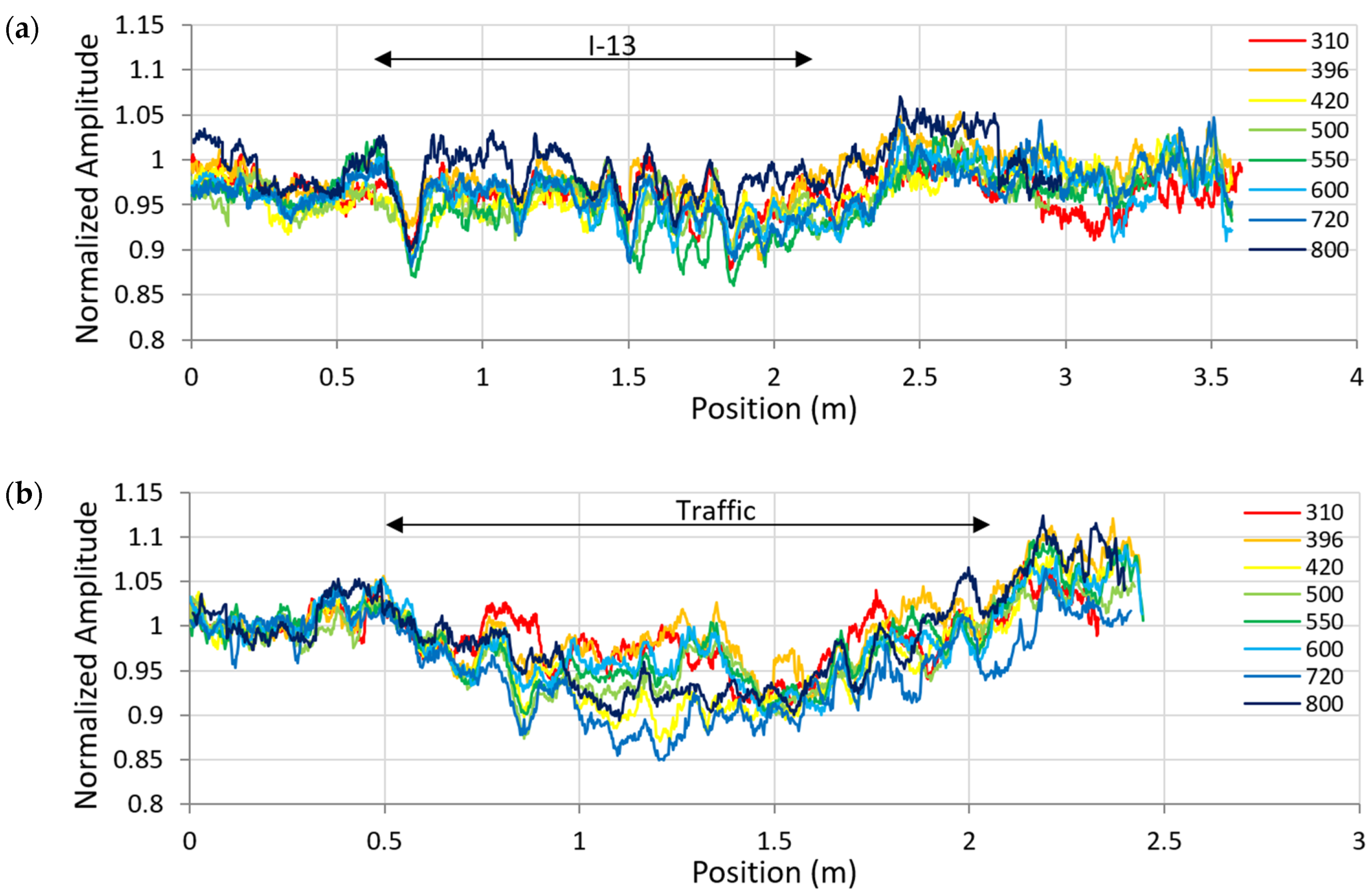
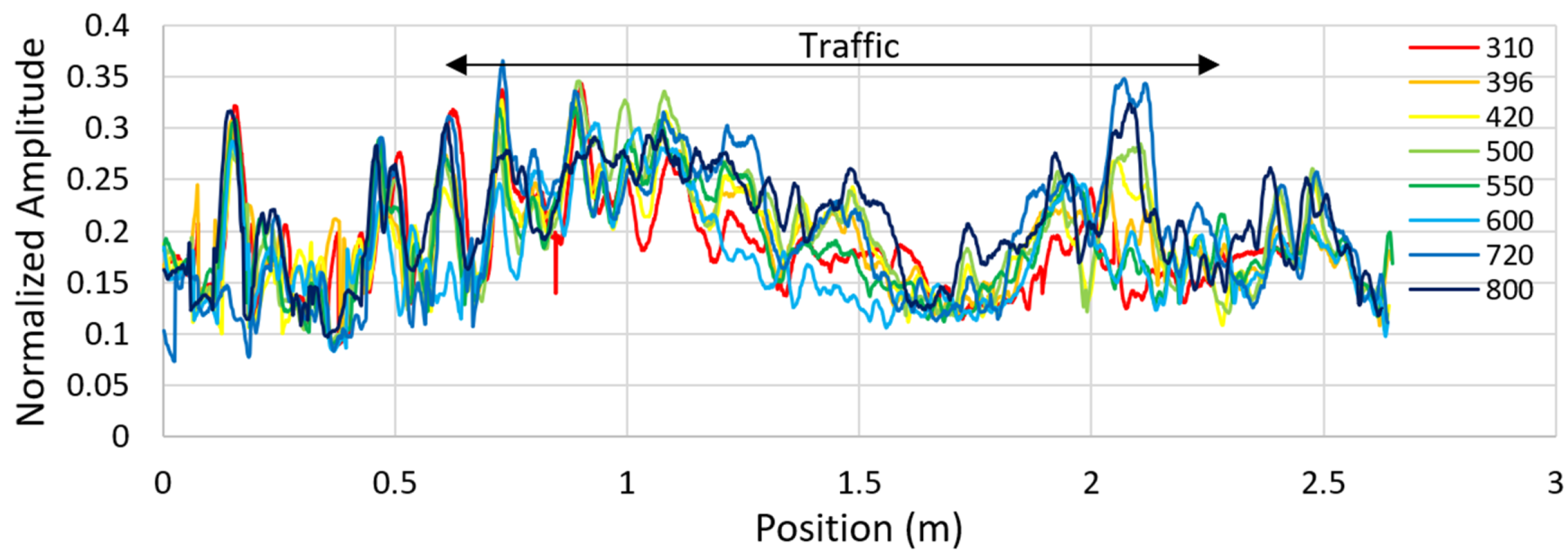
- In the healthy zones out and under traffic, normalized RW remains stable. Apart from a natural aging of the pavement layers, heavy traffic has had no effect on the road structure from GPR point-of-view. Moreover, due to low EM contrasts, sometimes echo picking was not easy and could lead to errors in their detection/location.
- -
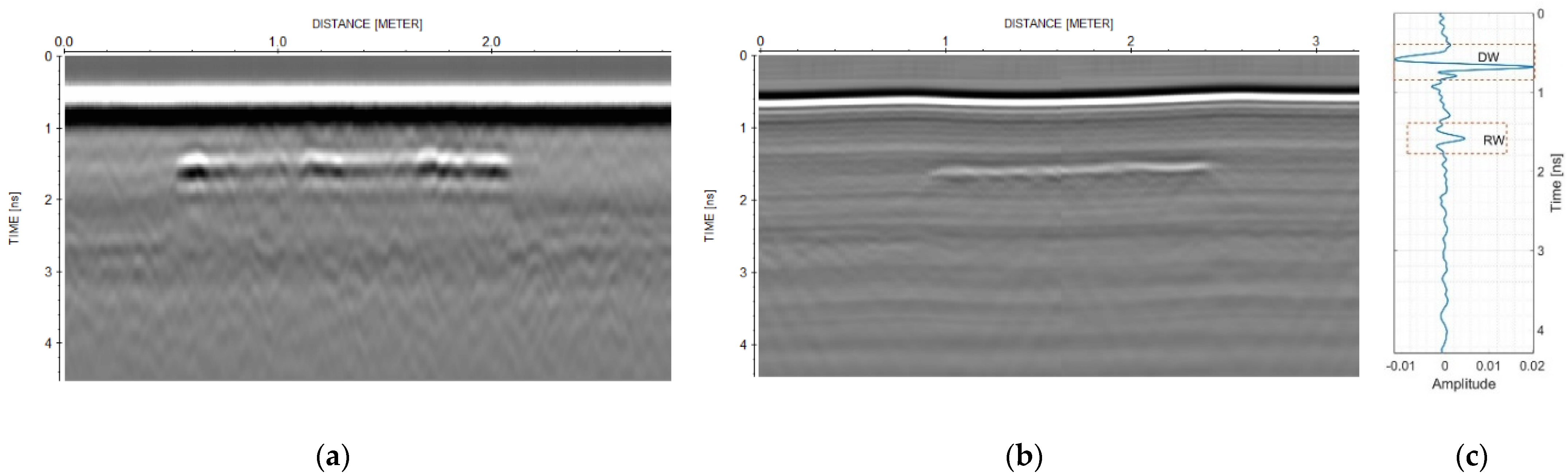
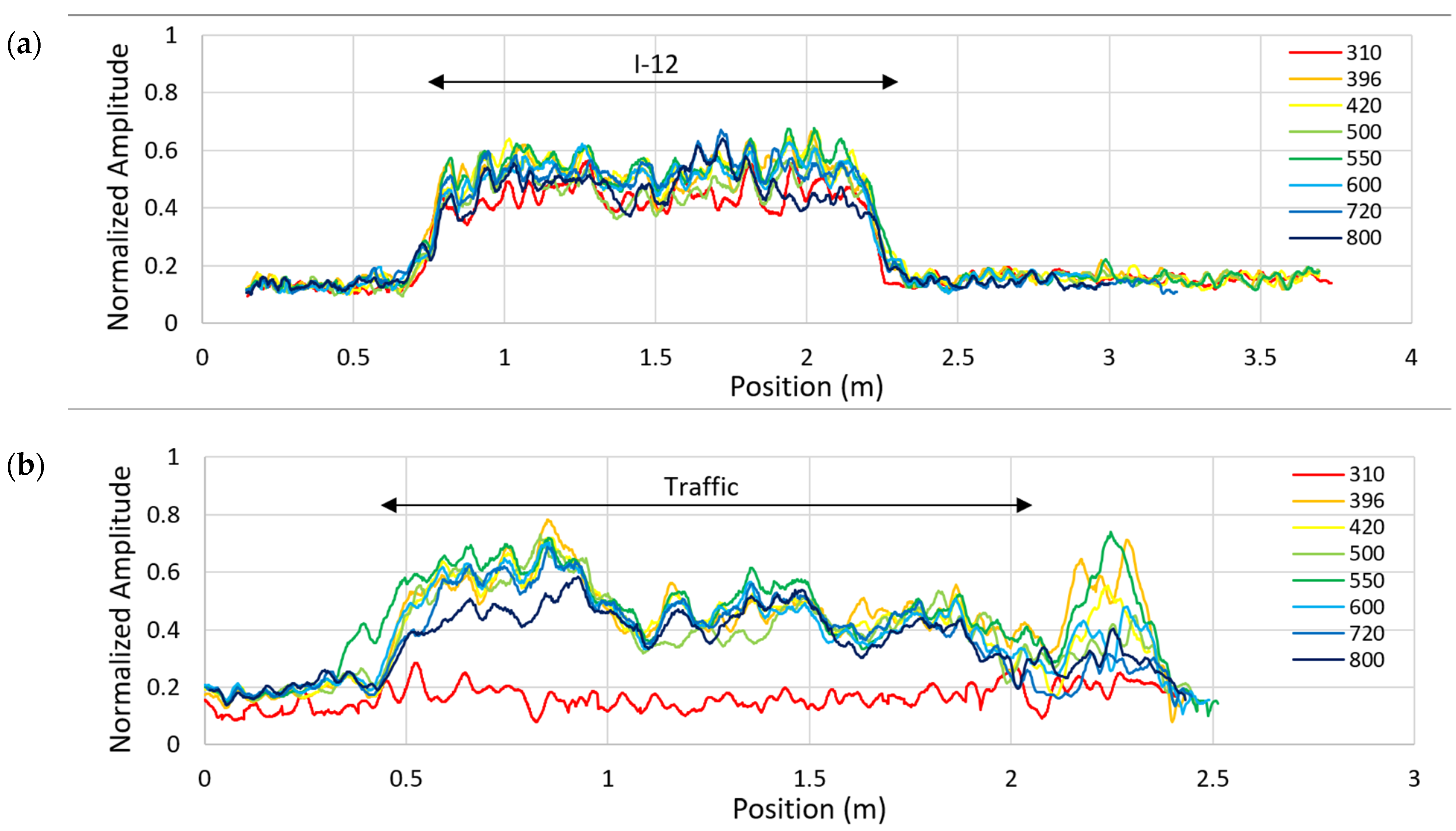
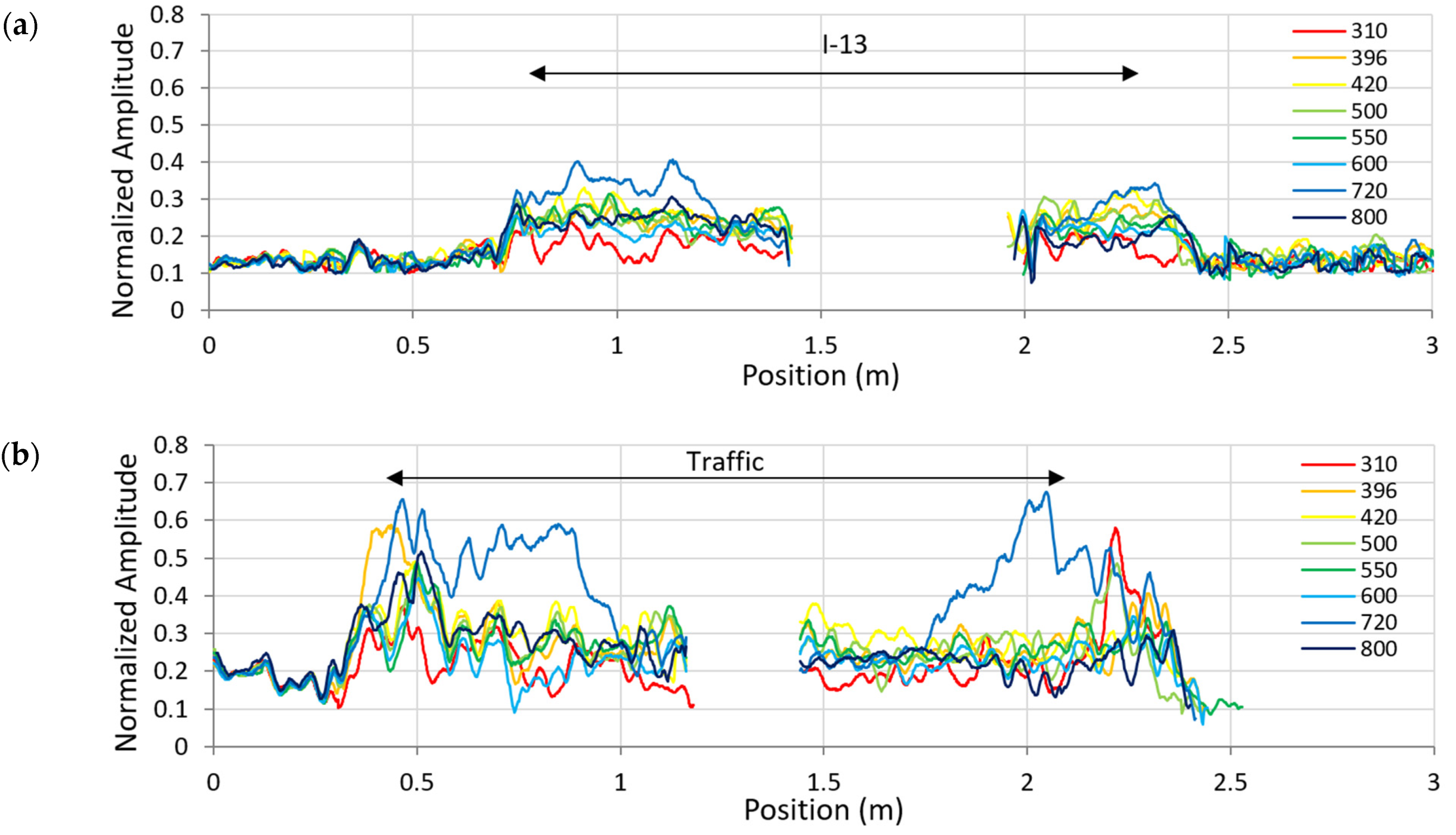
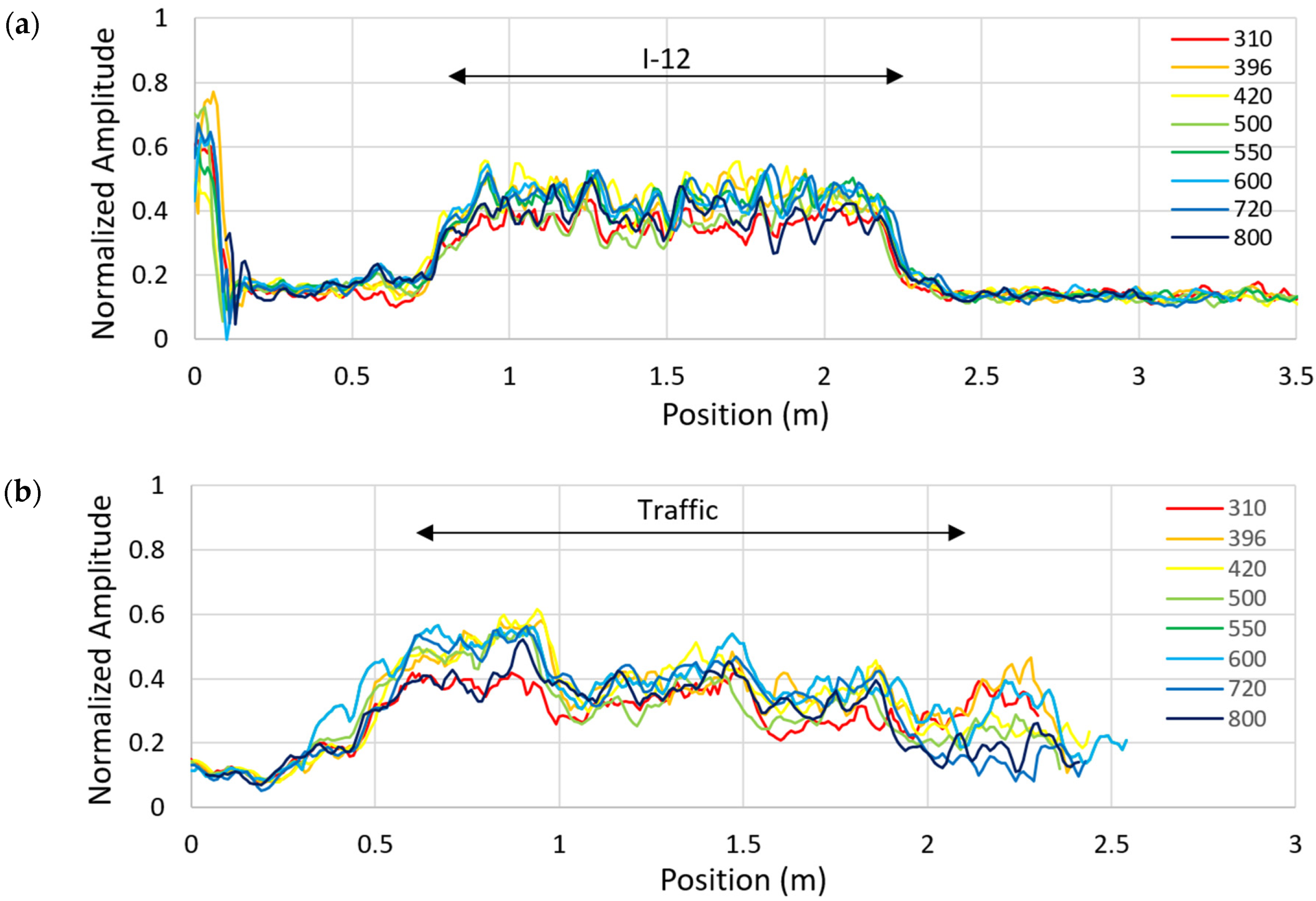
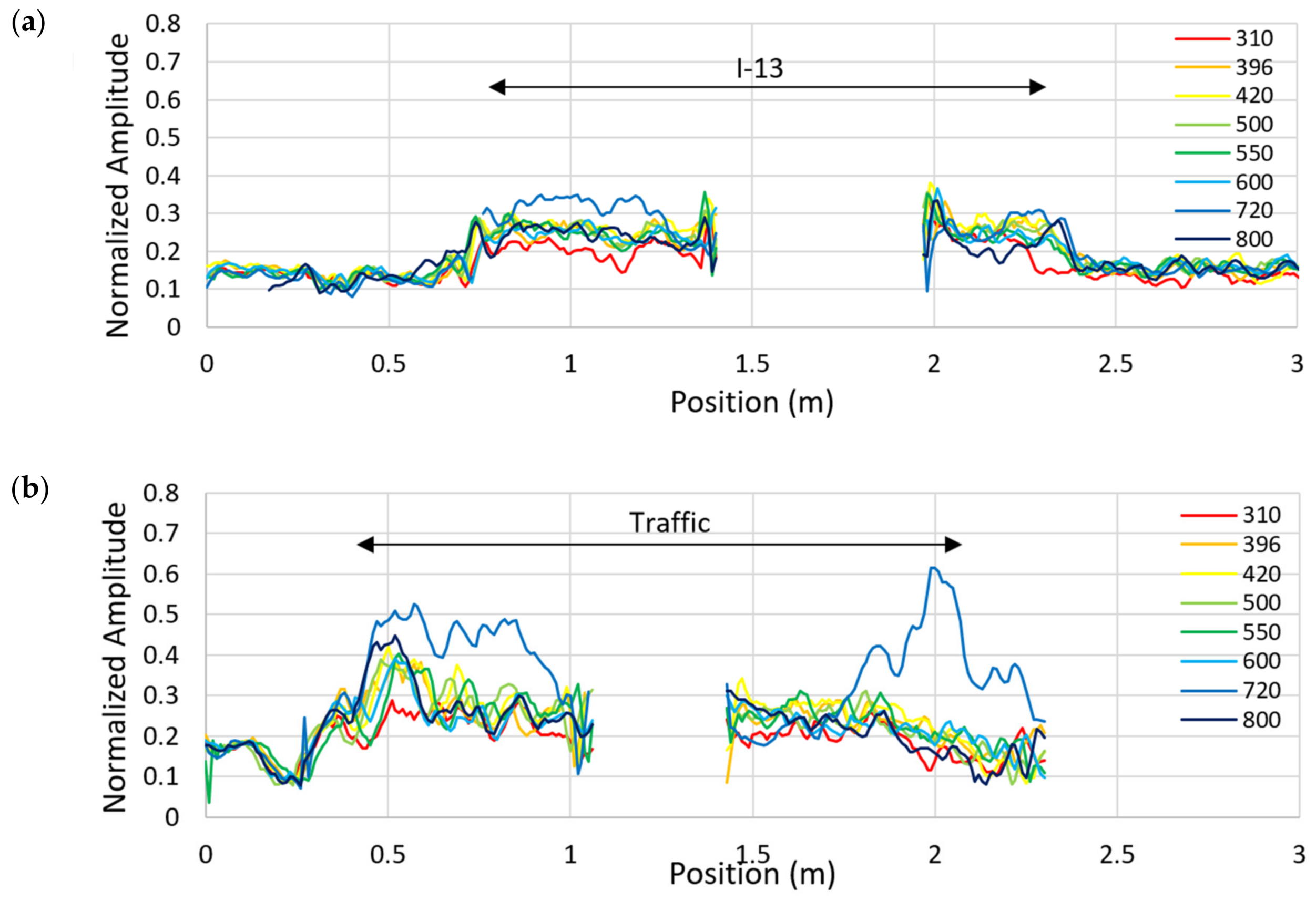
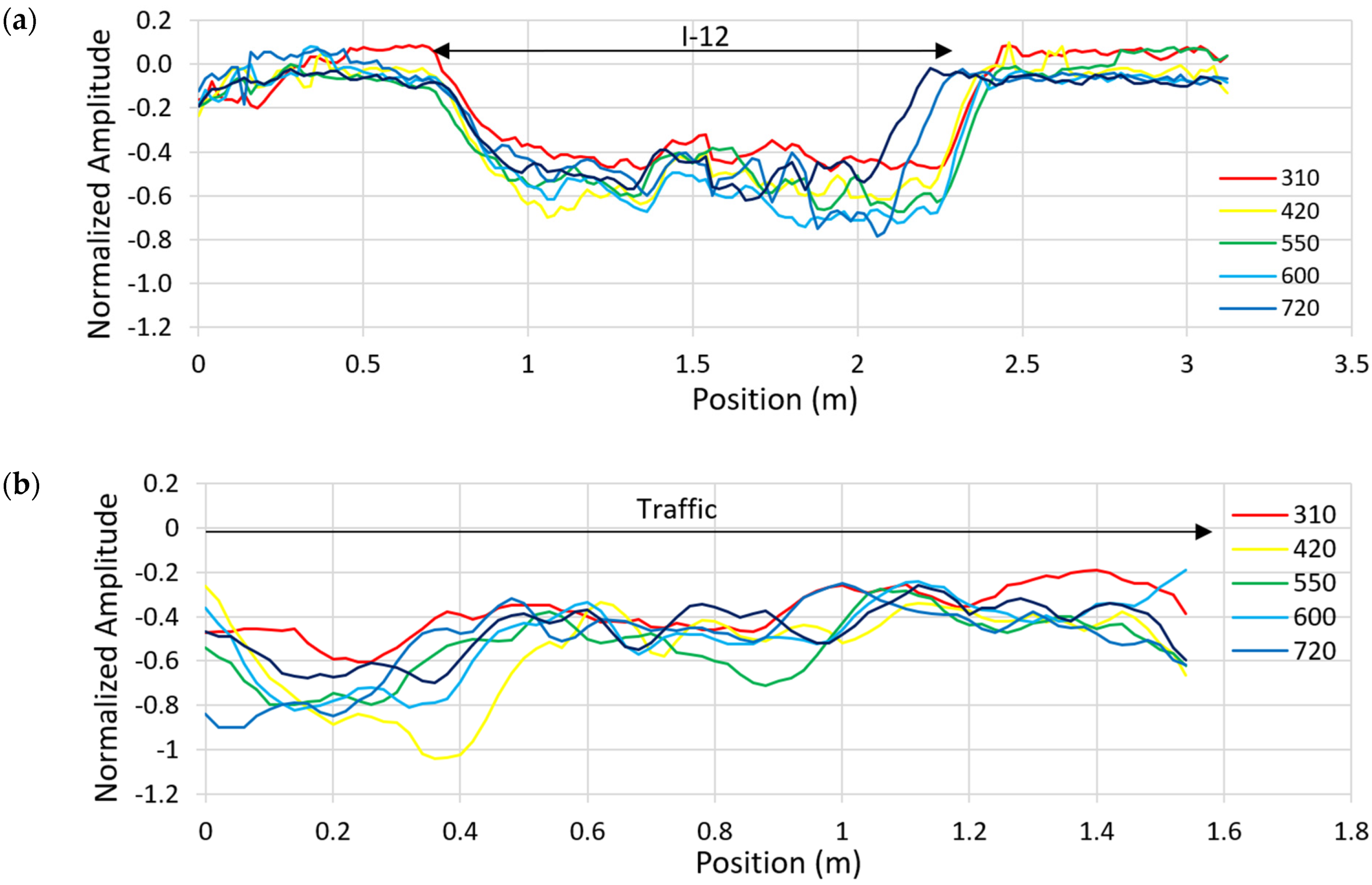
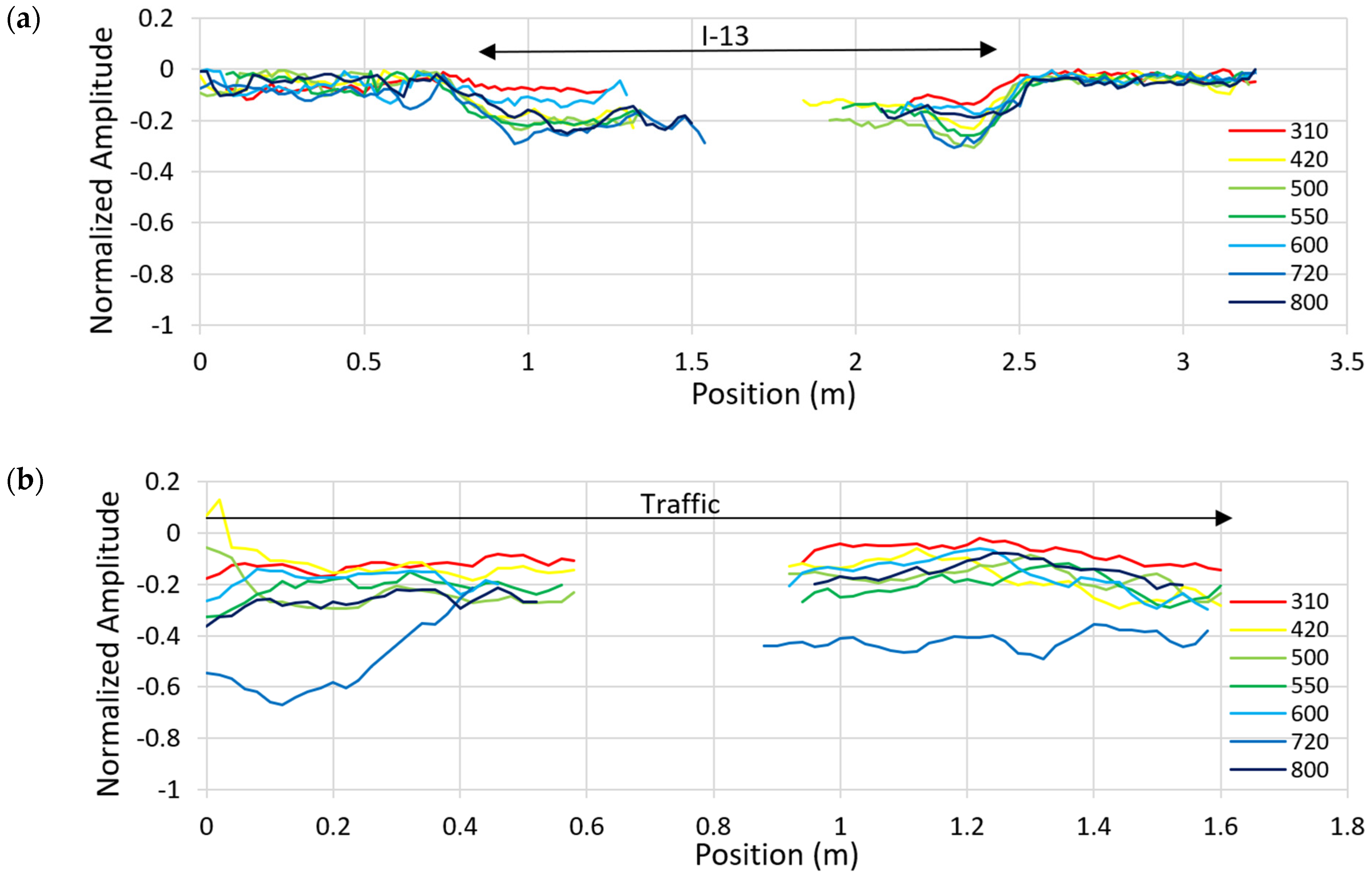
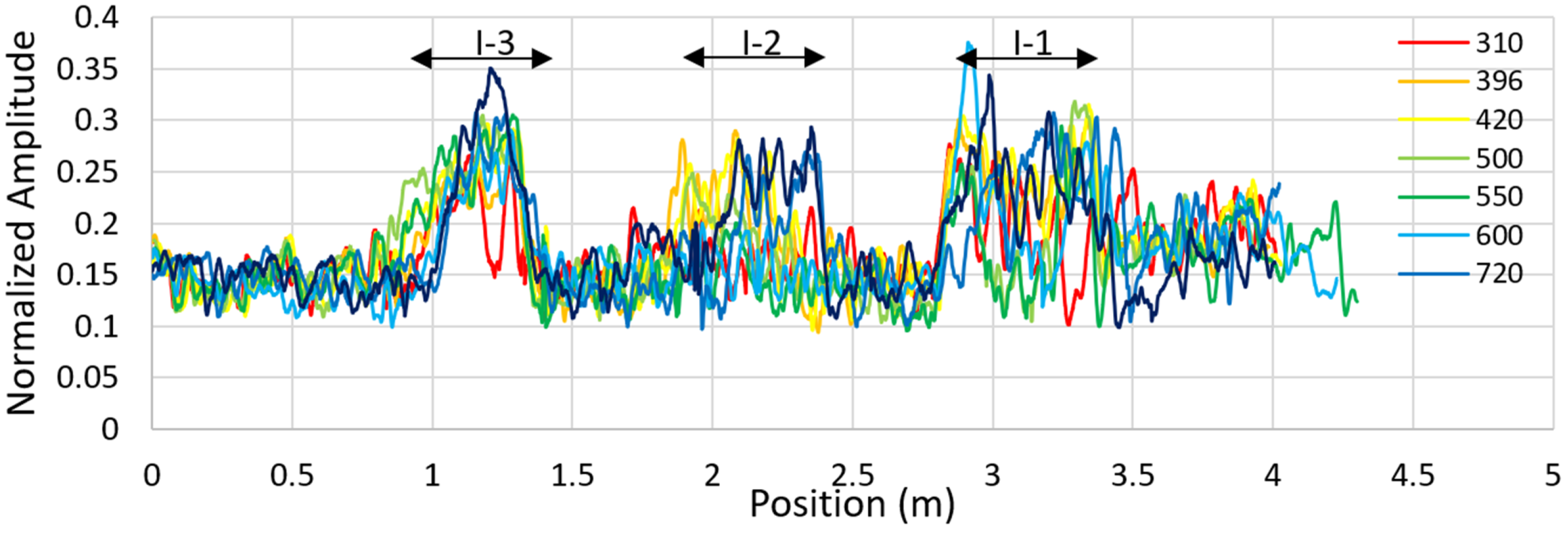
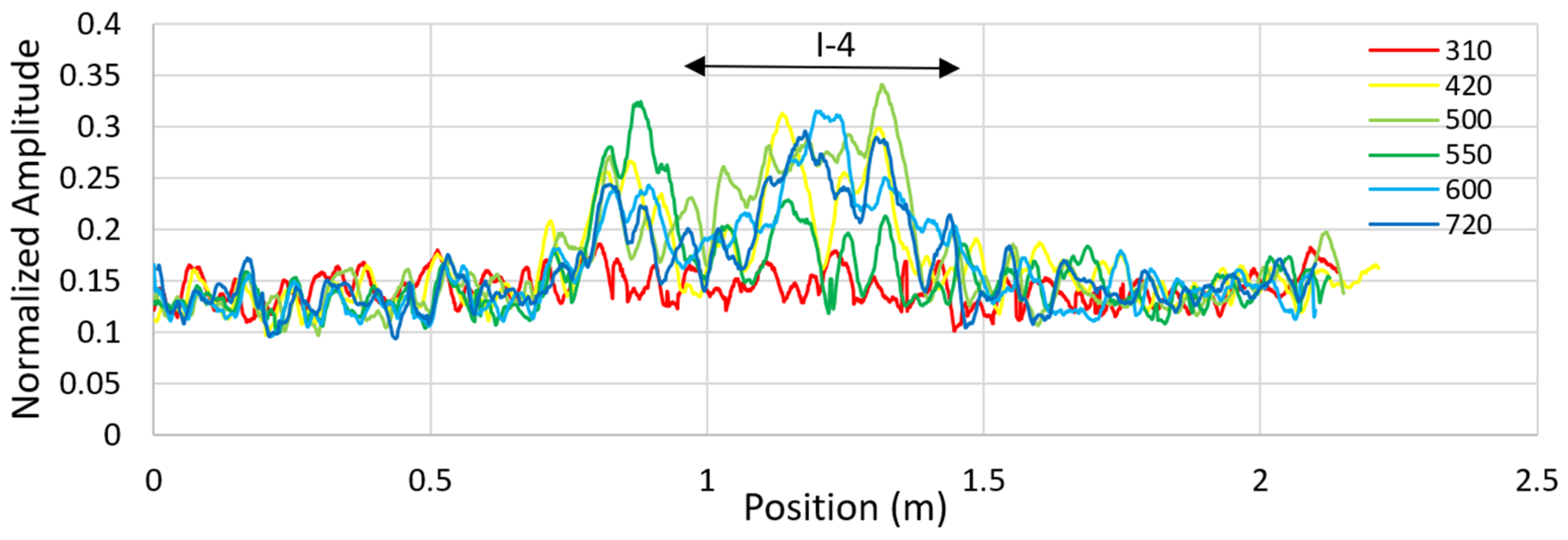
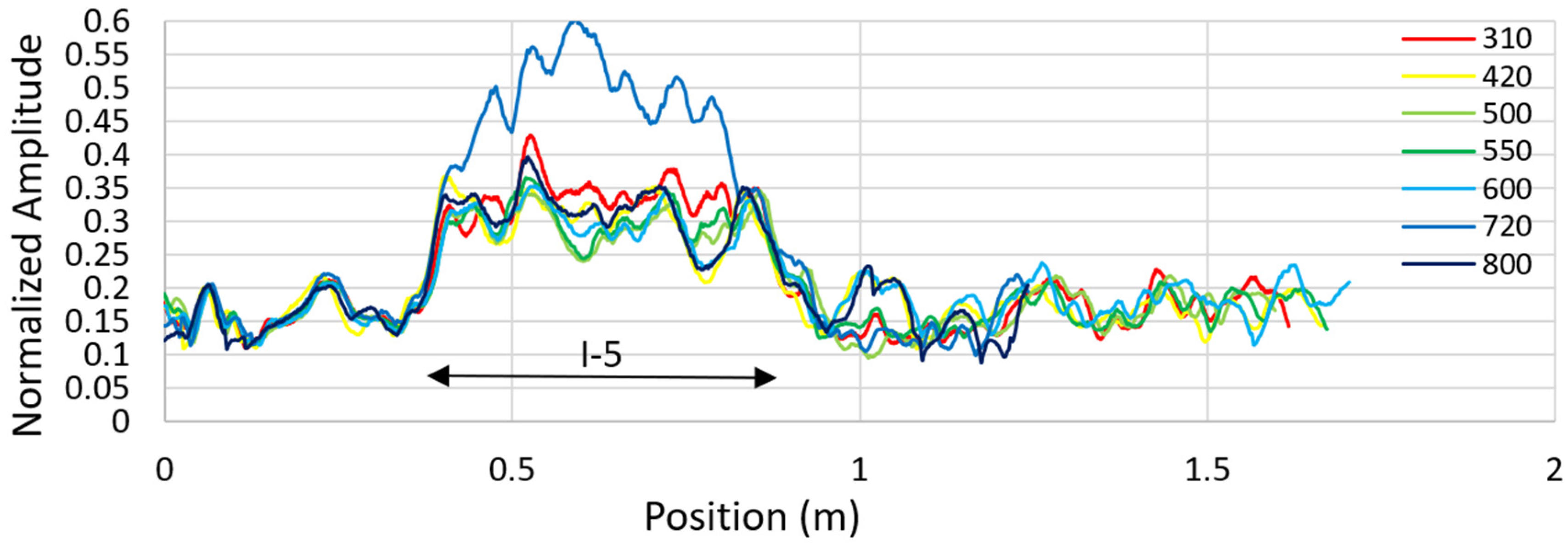
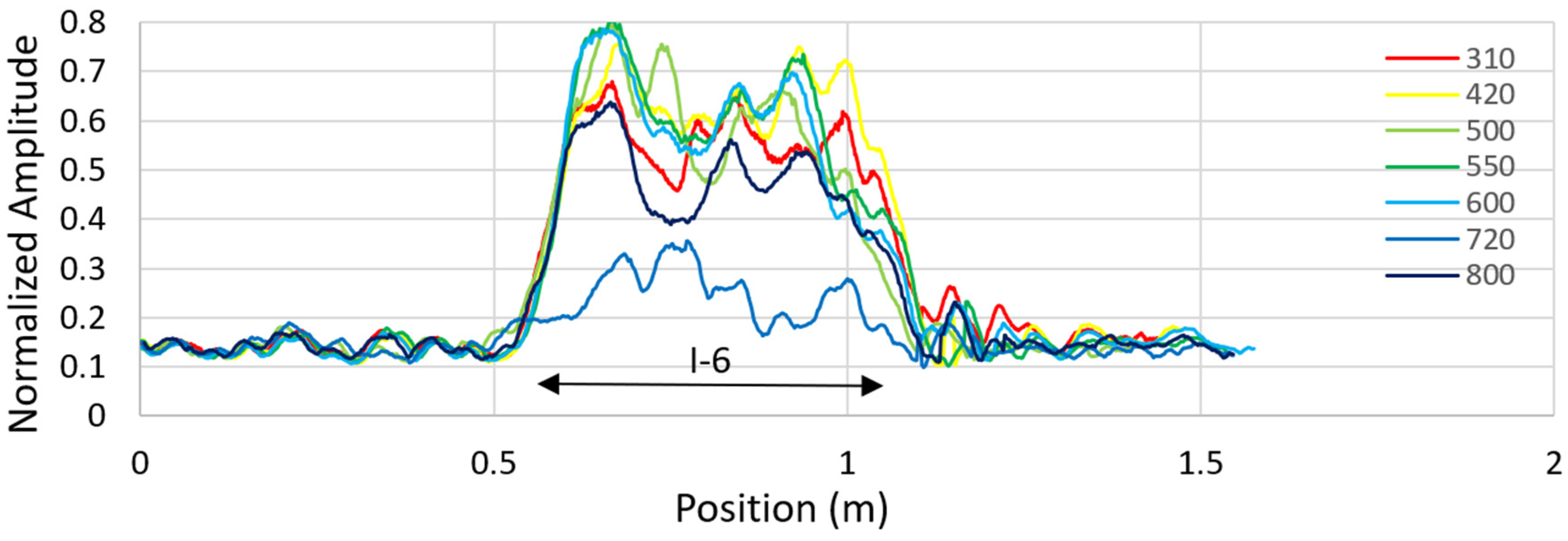
- Defects are clearly visible with a high level of RW amplitude but with strong local variations. These variations could be due to local heterogeneities enhanced by internal moisture content and by the fact that GPR antennas did not pass on exactly the same path. As an example, when studying B-scans performed on the geotextile defect in Figure 13a, standard deviations in the defect area are twice to four times greater than the ones in the sound area. Geotextile and sand-based defects show stronger radar echoes due to higher EM contrasts.
- -
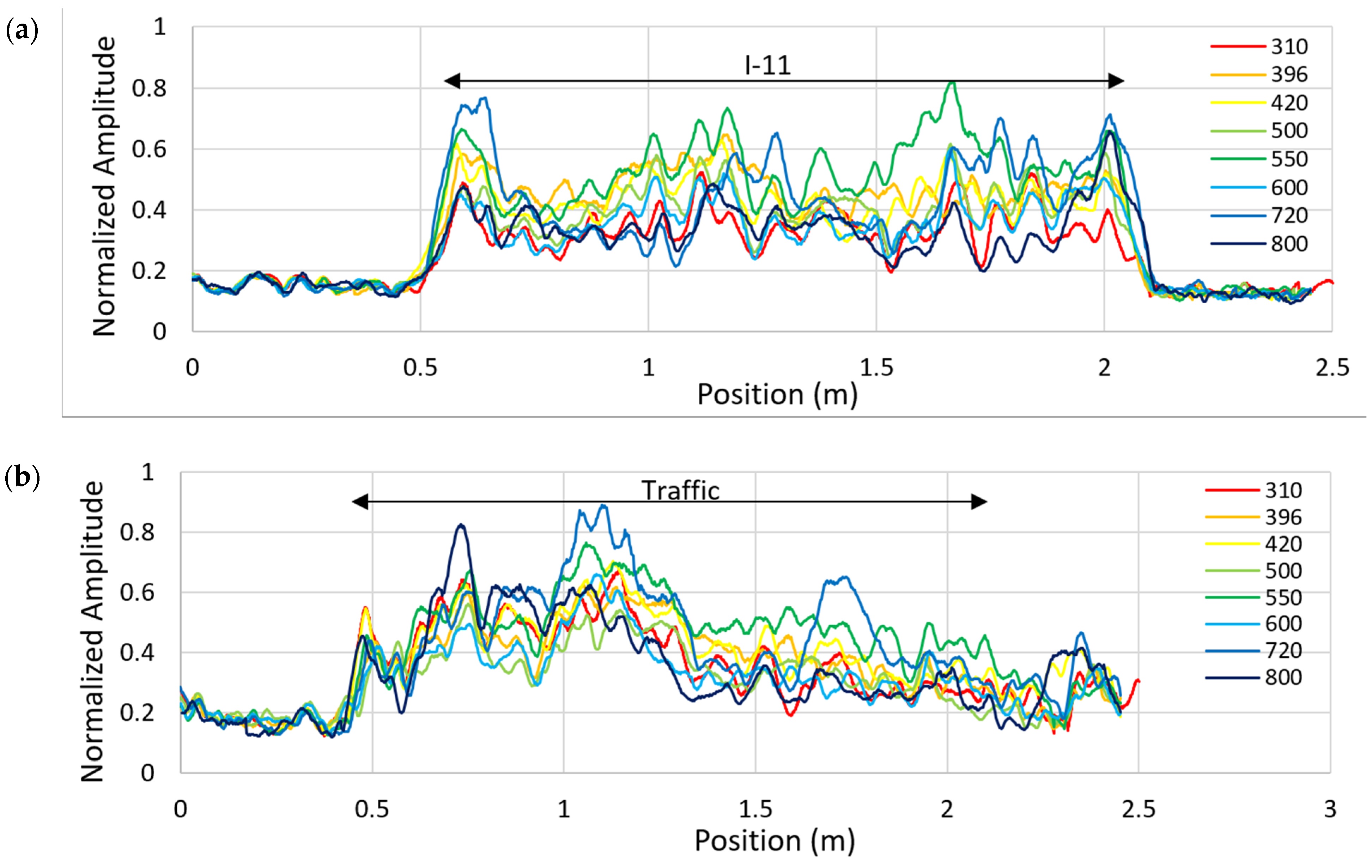
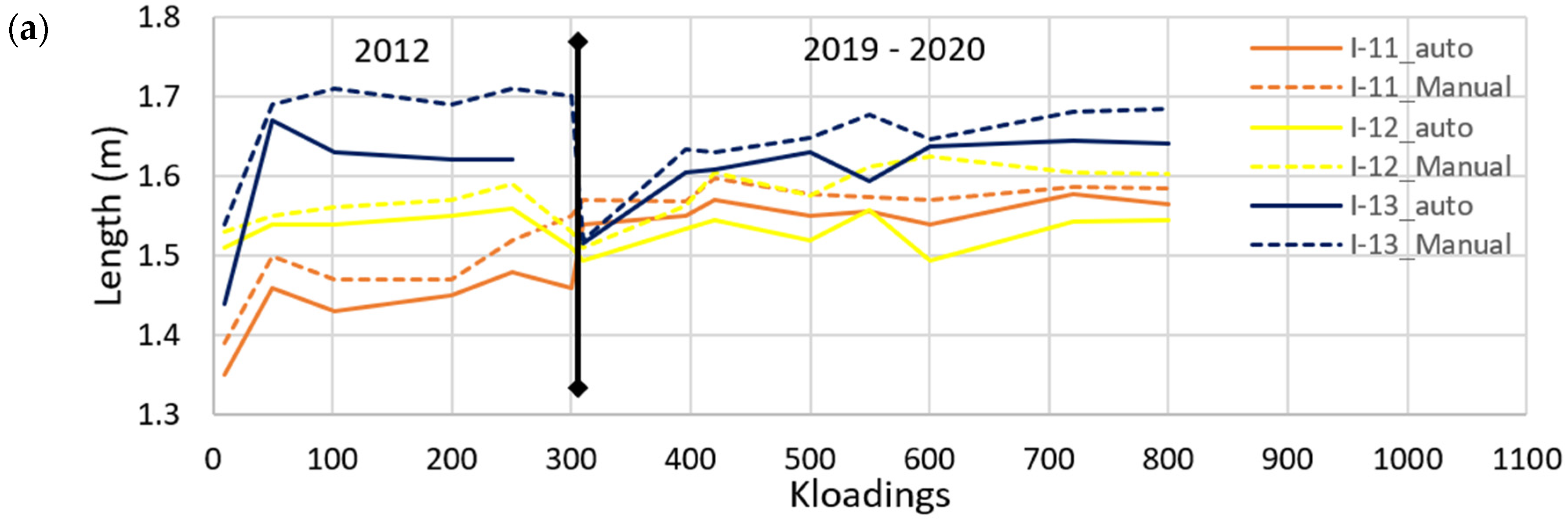
- Longitudinal data show stable values along the defect and no major defect expansion of it. As presented in Table 3, the amplitude threshold was fixed to 0.24. A complementary threshold value has been estimated around 0.20 and is varied depending on the evaluation by a GPR specialist (presented as manual length). Figure 15a shows that horizontal extension vs. traffic remain very low even if they show several centimetric increases at the beginning of the two periods. Moreover, some natural auto-repair during the intermediate period was observed.
- -
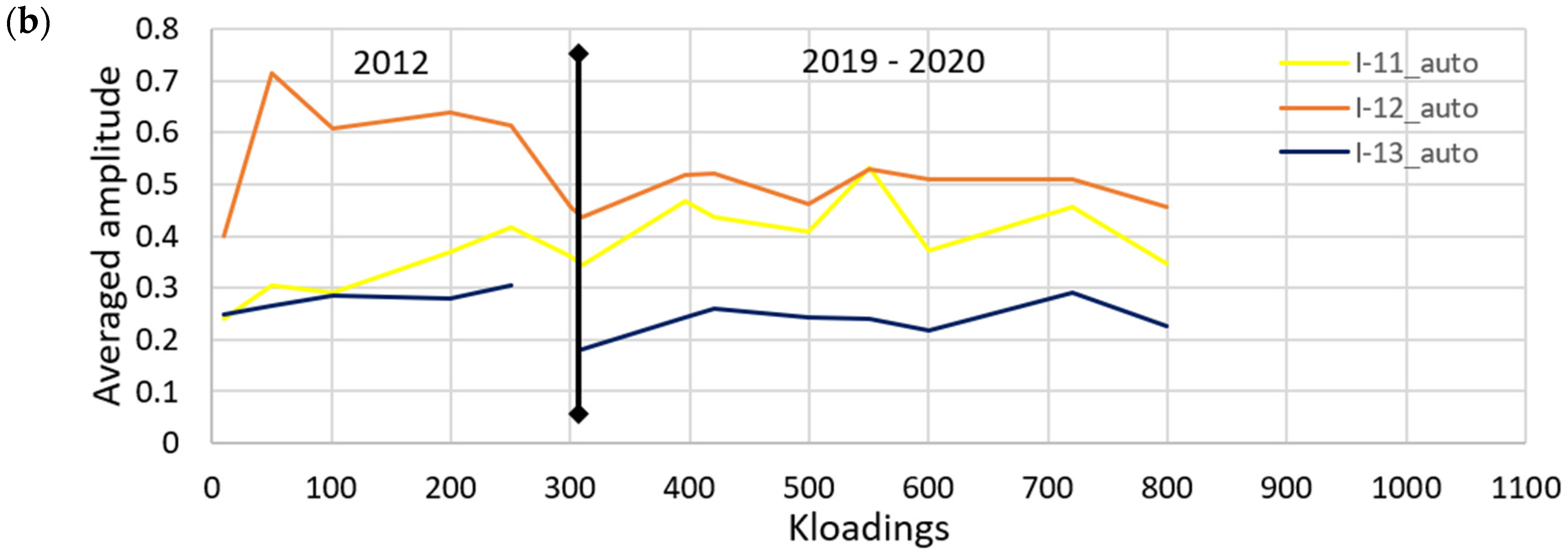
- When studying the amplitude evolution vs. traffic, we cannot make a direct link. Variations mainly come from moisture content inside the defect due to the weather conditions from the previous days, and perhaps in a second step, from variations of temperature. Table 3 summarizes this information, while giving an average value of amplitude all along the defects (Figure 15b).
- -
- Transverse data present a general trend of RW decrease while moving towards the outside of the carrousel due to the road topography promoting inward water migration and possible lateral water gradient (see Figure 7). It should be mentioned that this trend seems not to be correlated with the traffic density.
- -
- With the width of defects (2 m) being larger than the traffic path (1.65 m), outside the traffic path we do not observe any evolution of the amplitude over the defect. This comment only concerns the inner area (left parts of the Ffigures), as a tiny elevation of the pavement course, existing at the external peripherical test section, disturbs the ground-coupled GPR acquisition.
3.3.2. Study of Defects I-11 to I-13 at 1.5 GHz
3.3.3. Study of Defects I-11 to I-13 at 5 GHz
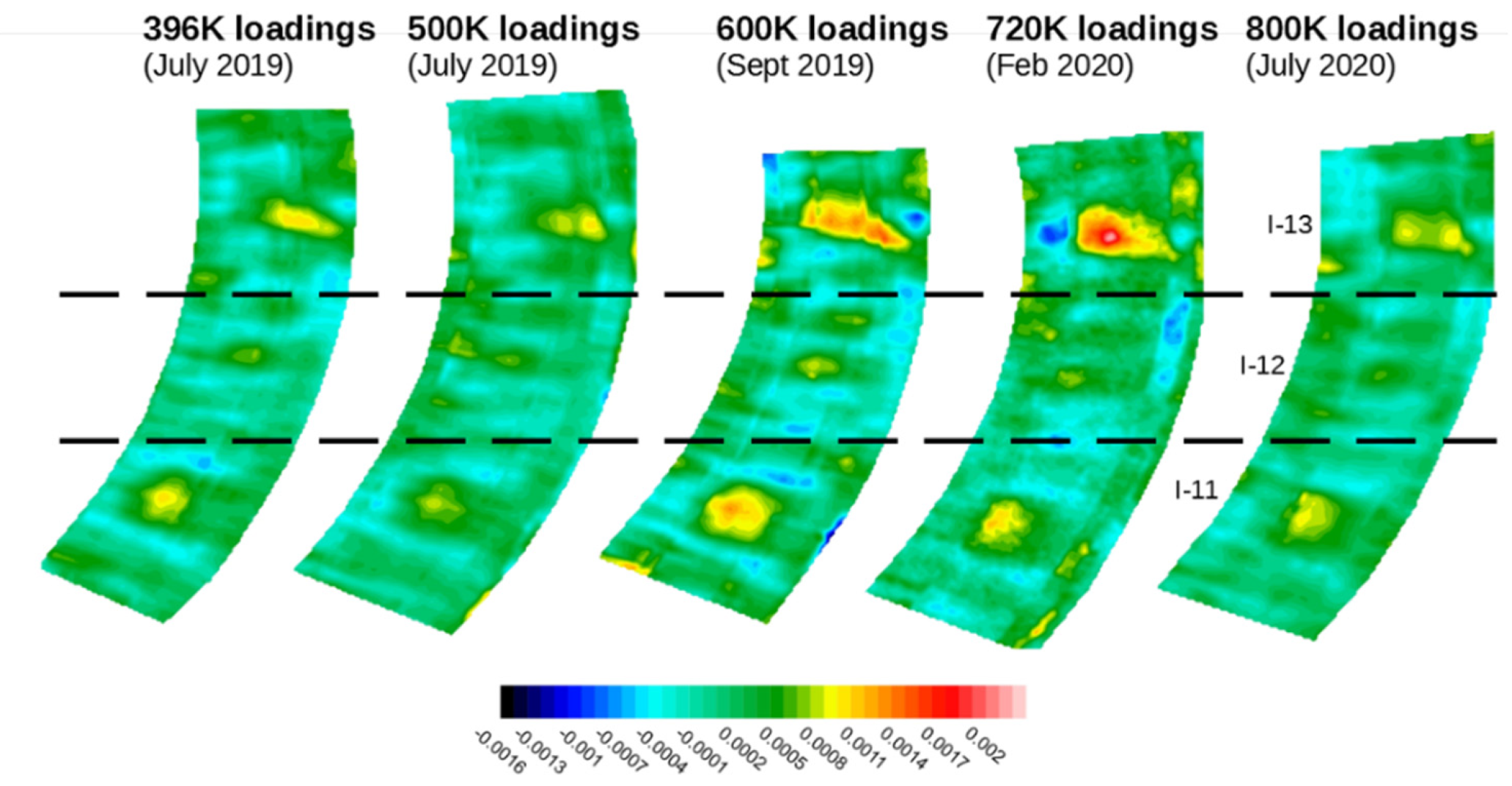
3.4. Direct Waves in the Zone I-11 to I-13 at 2.6 GHz
3.5. Study of Defects I-1 to I-3
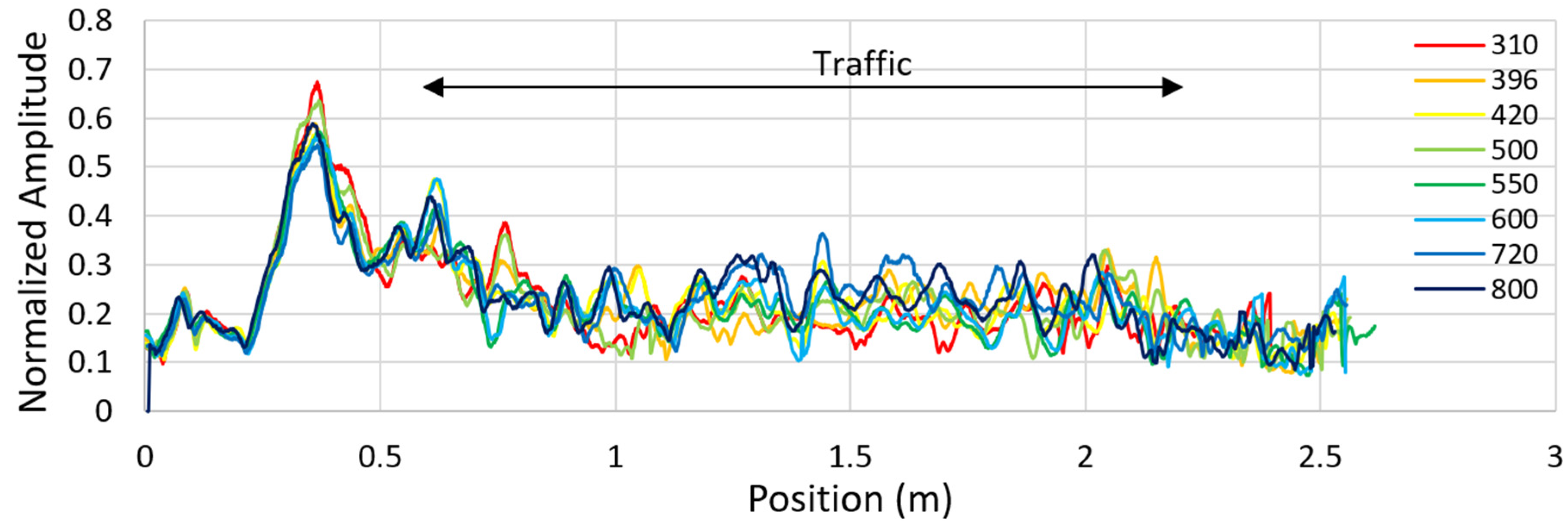
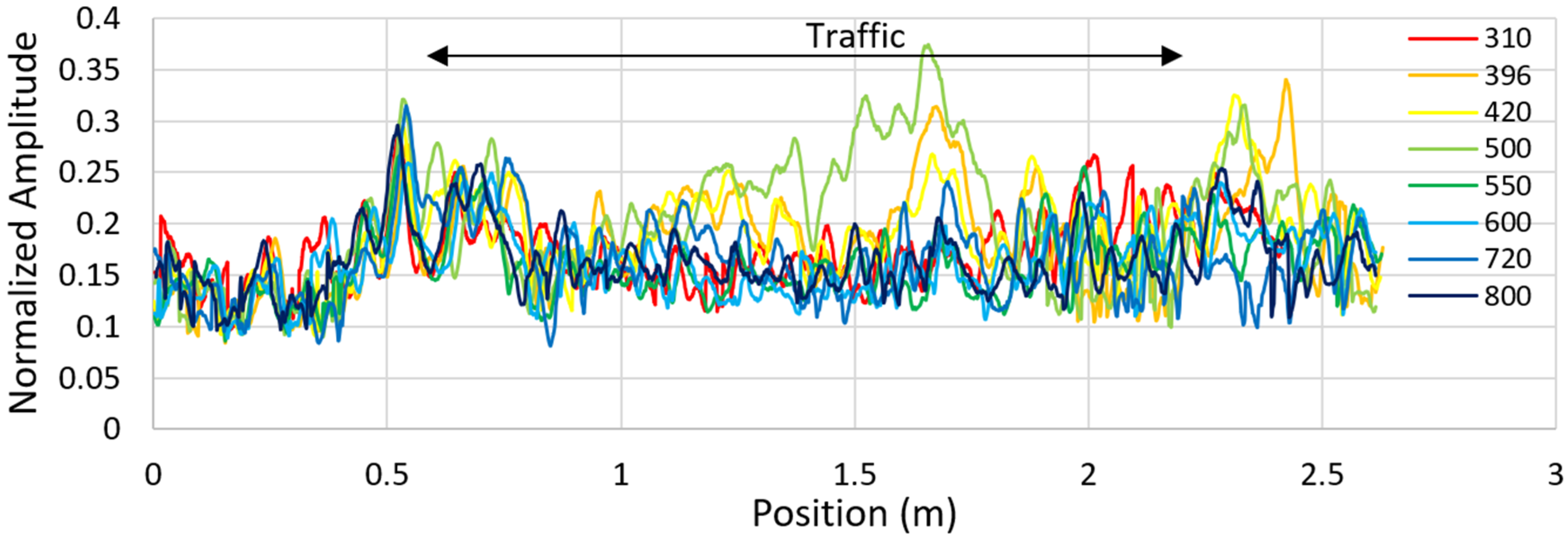
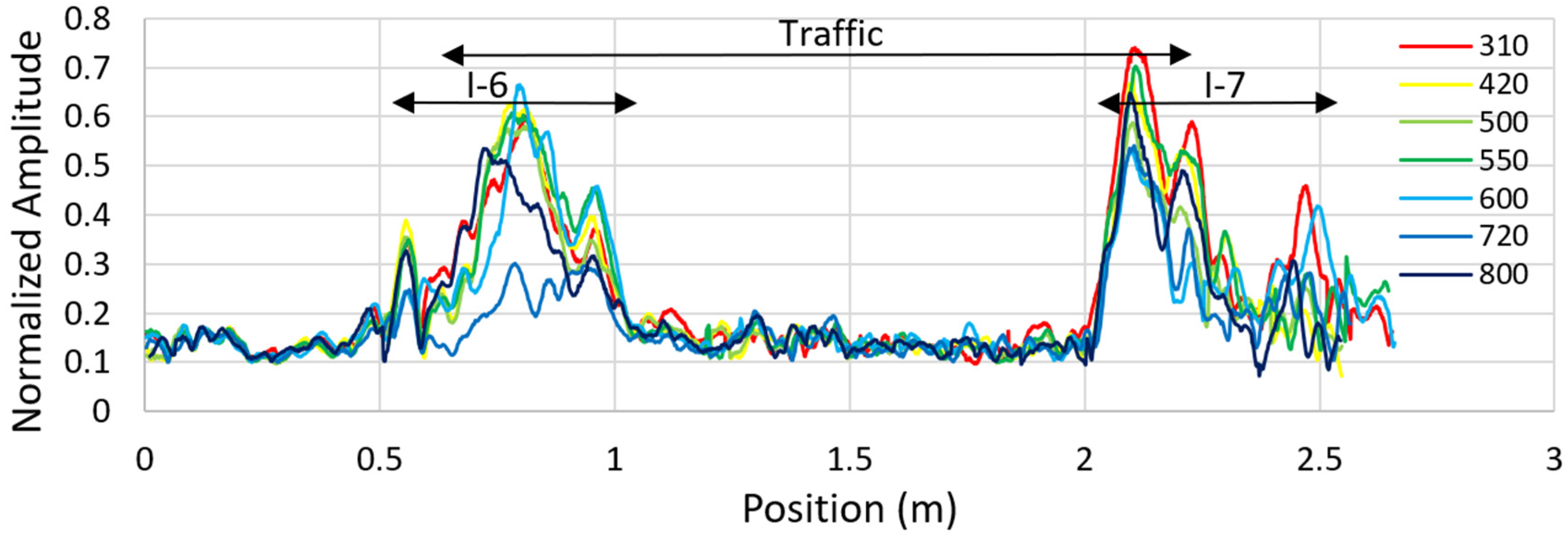
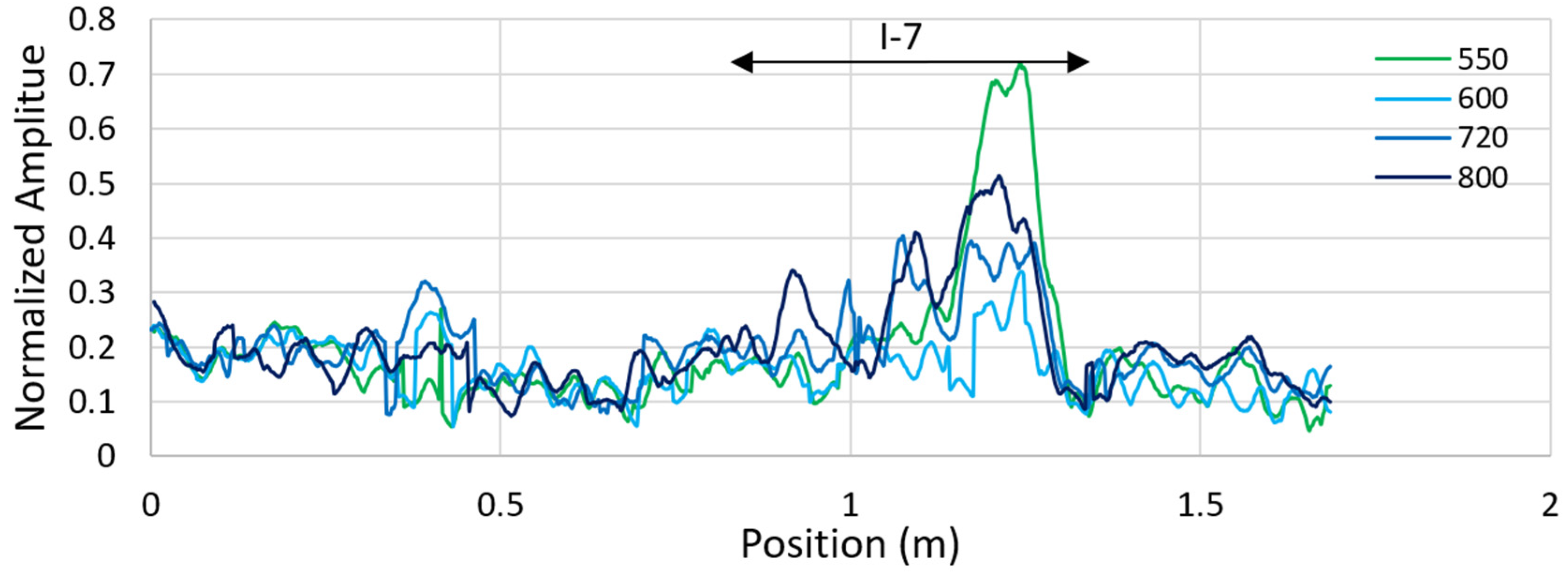
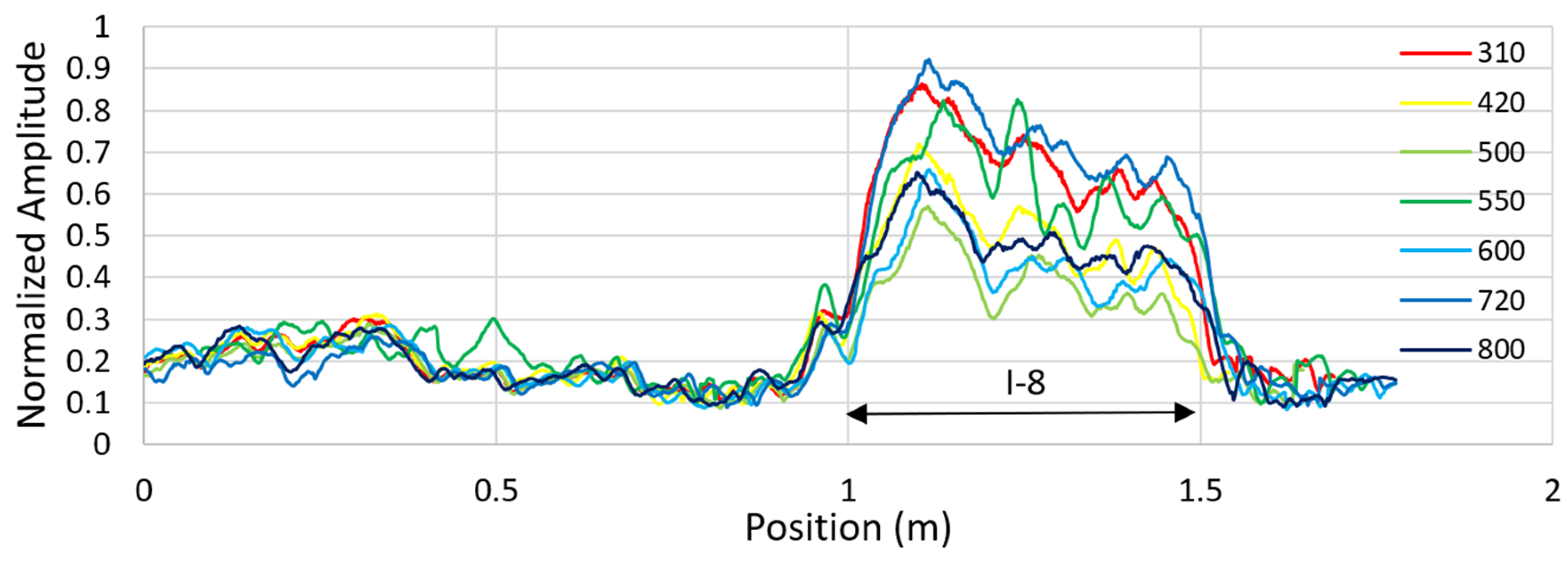
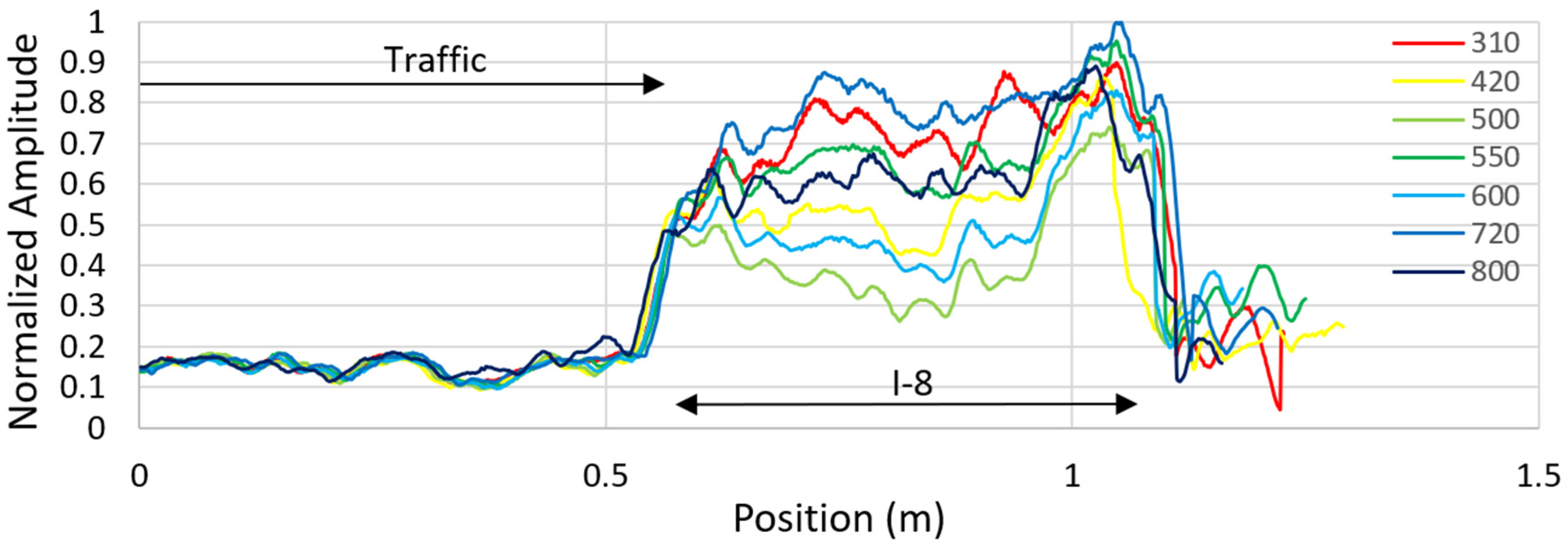
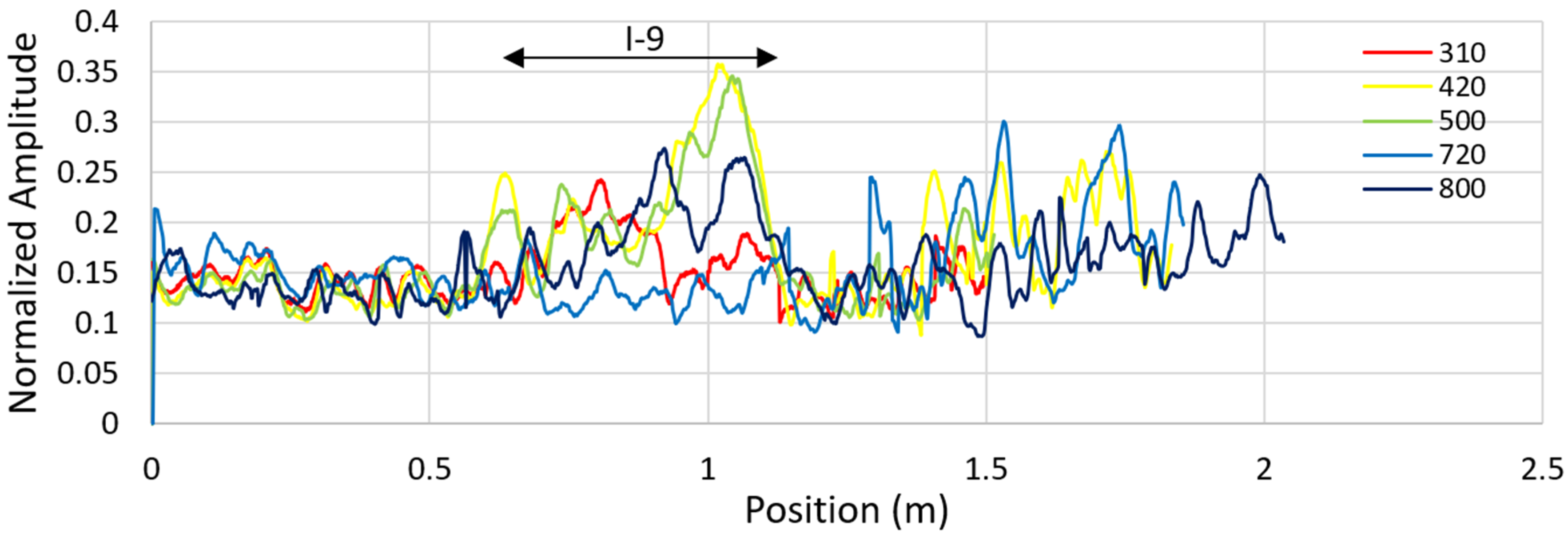
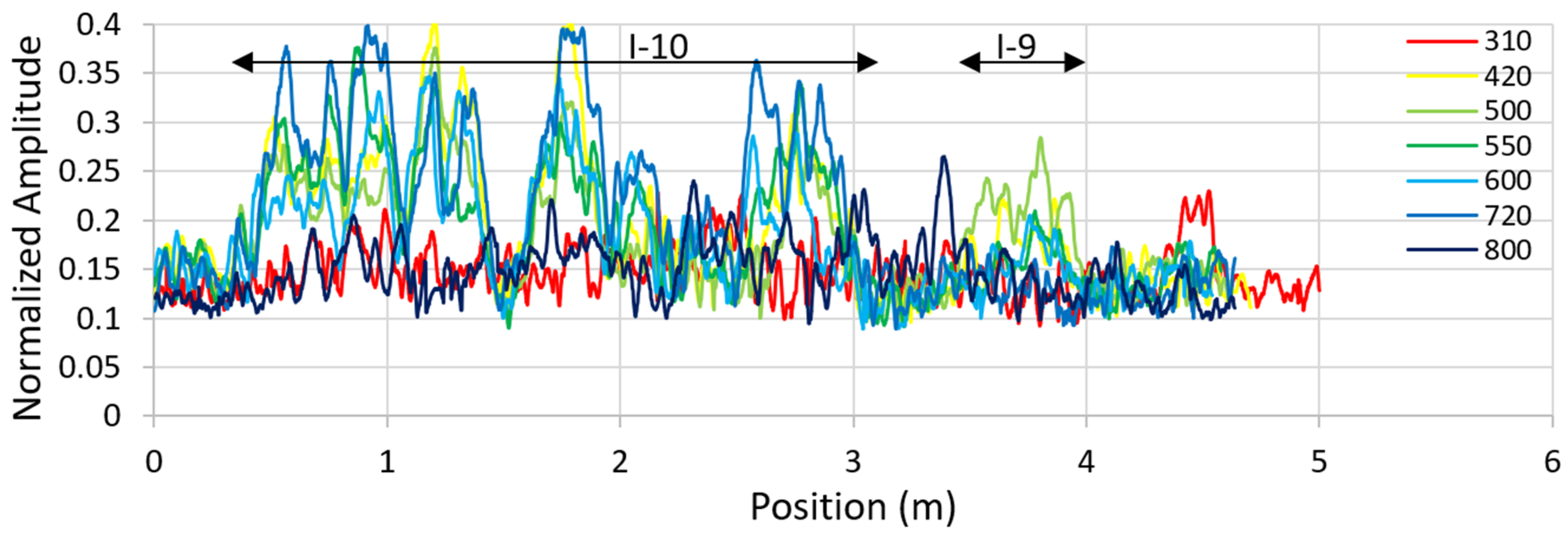
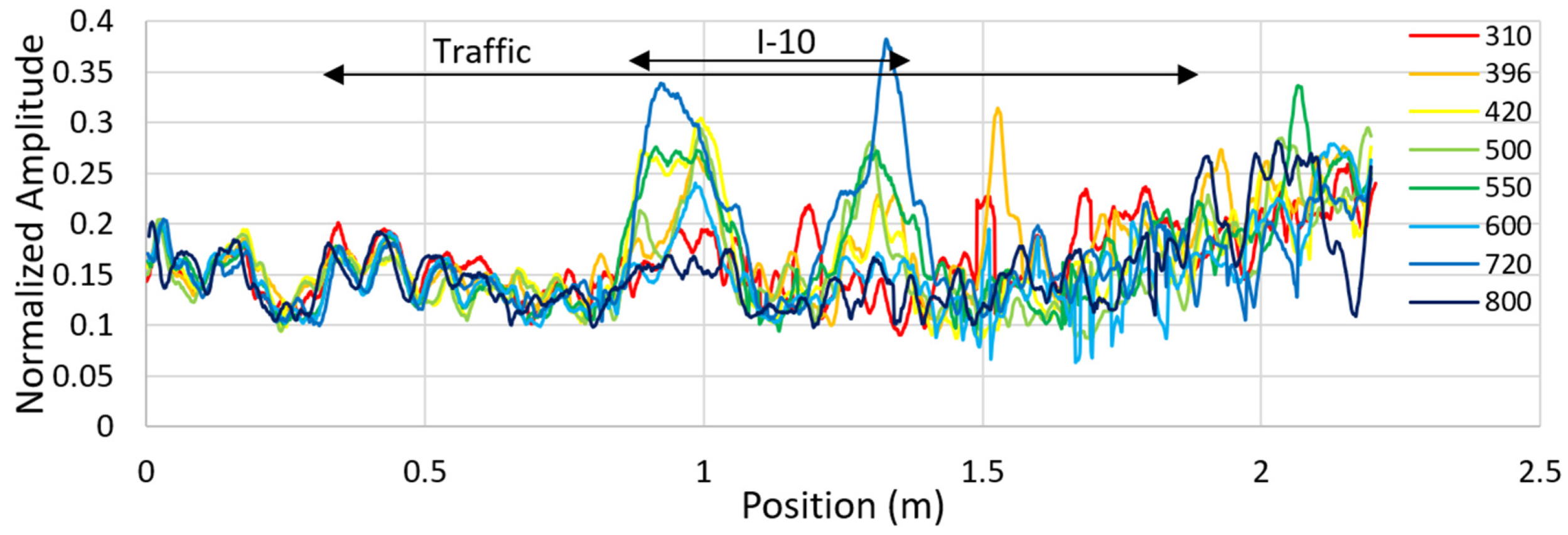
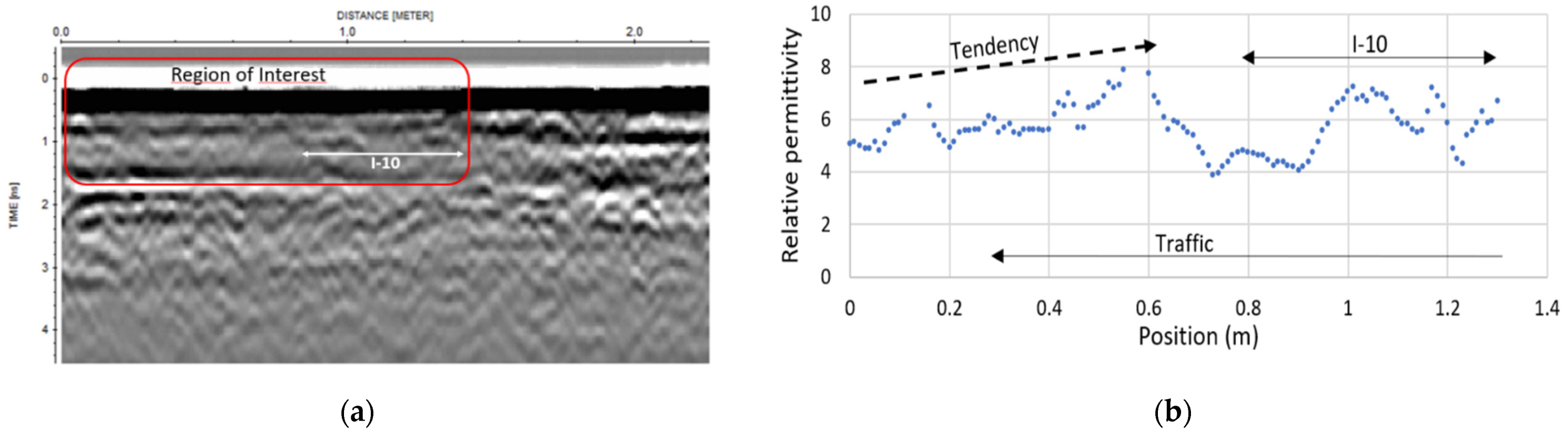
3.6. Study of Defects I-4 to I-10
4. Autopsy of the Road Section
4.1. Extraction of Transversal Blocks
- -
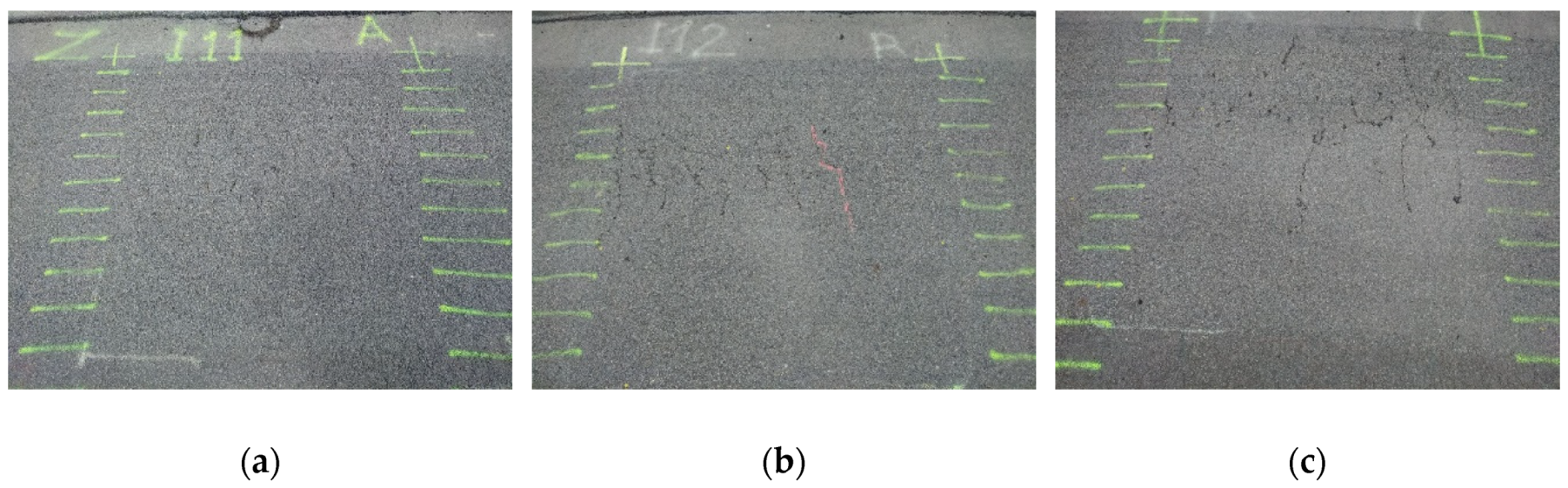
- The geotextile-based defect presents no clear degradation. The geotextile is about 5 mm thick and remains glued to the layer 1. When it is debonded to layer 2, we cannot see its lateral extension.
- -
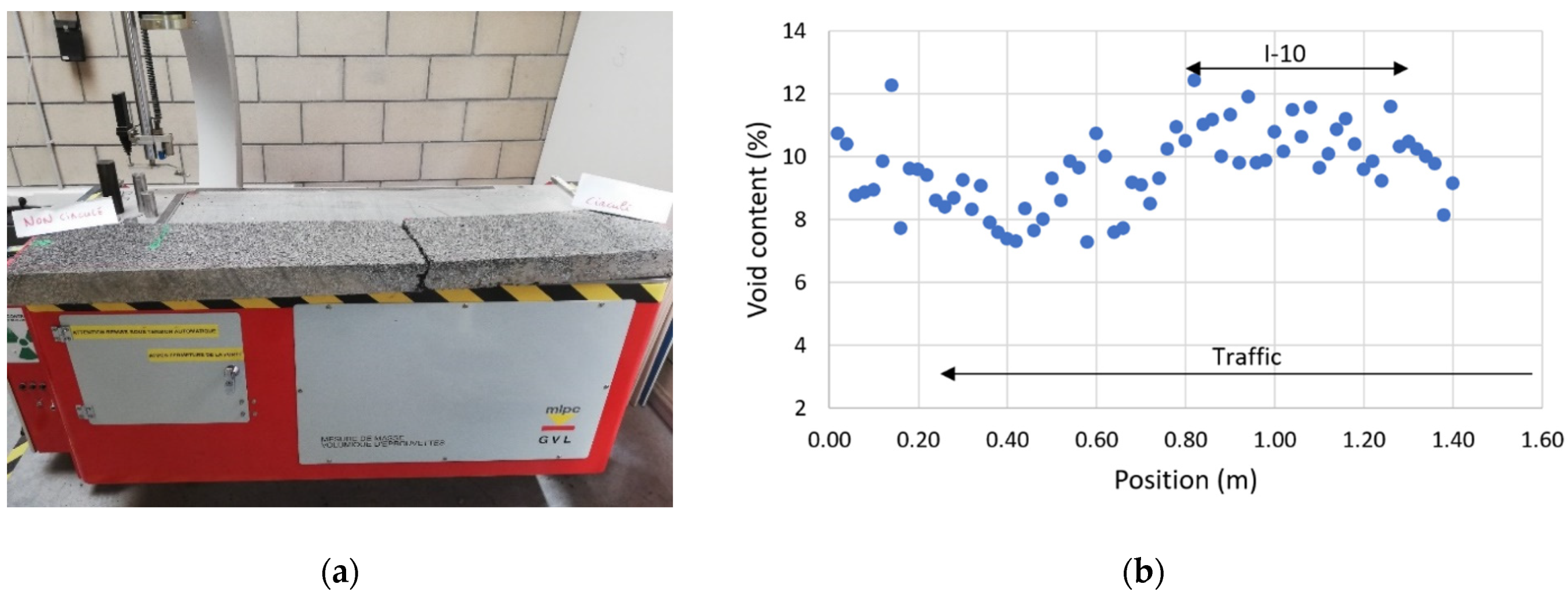
- Concerning the sand-based defect, a layer of void is visible due to sawing under water, which carried away the sand. The apparent thickness of this debonding is about 3 mm, with a maximum of 11 mm near the inner radius and a minimum around 1.2 mm seen near the center of the traffic. Moreover, it seems that no aggregates were loosened from one of the two asphalt layers.
- -
- The tack-free-based defect presents a narrow debonding (visible by wetting in Figure 40c) all along the defect of sub-millimeter to millimeter thickness, but no loose aggregates.
4.2. Estimation of Void Content and Relative Permittivity
5. Conclusions
- -
- Defects are detected almost all the time (with exceptions), due to sufficient dielectric contrasts. The geotextile defect presents the strongest EM contrast followed by the sand-based defect, with the tack-free defect being nevertheless detectable.
- -
- Debondings did not show lateral expansions during the life-cycle of the tested structure.
- -
- Variations of normalized reflected amplitude of the interface echoes did not show a reliable correlation with heavy traffic. Amplitudes appeared to be more sensitive to the meteorology (humidity, water ingress from rainy periods, temperature) and the time delay between the end of traffic step and GPR measurements. Indeed, for the first point, the appearance of micro-cracks allowed increased moisture content inside the defect due to the weather conditions from the previous days. For the second point, under high temperatures, asphalt layers with visco-elastic materials could slightly auto-repair, therefore reducing the EM contrasts.
- -
- When comparing the central frequencies for the detectability of debonding defects, considered as very thin layers, 2.6 GHz corresponds to the best frequency for debonding detection, compared to the two others. This central frequency, higher than 1.5 GHz, shows better sensitivity to very thin layer as debonding, and is not attenuated as at 5 GHz. Indeed, at such very high frequencies, EM waves are scattered by the biggest aggregates (diam. = 10 mm) inducing an attenuation that counterbalances their sensitivity to very-thin-layer detection. This phenomenon is not visible on the B-scans as the beamwidth of the air-coupled antennas induces an average on this scattering effect.
- -
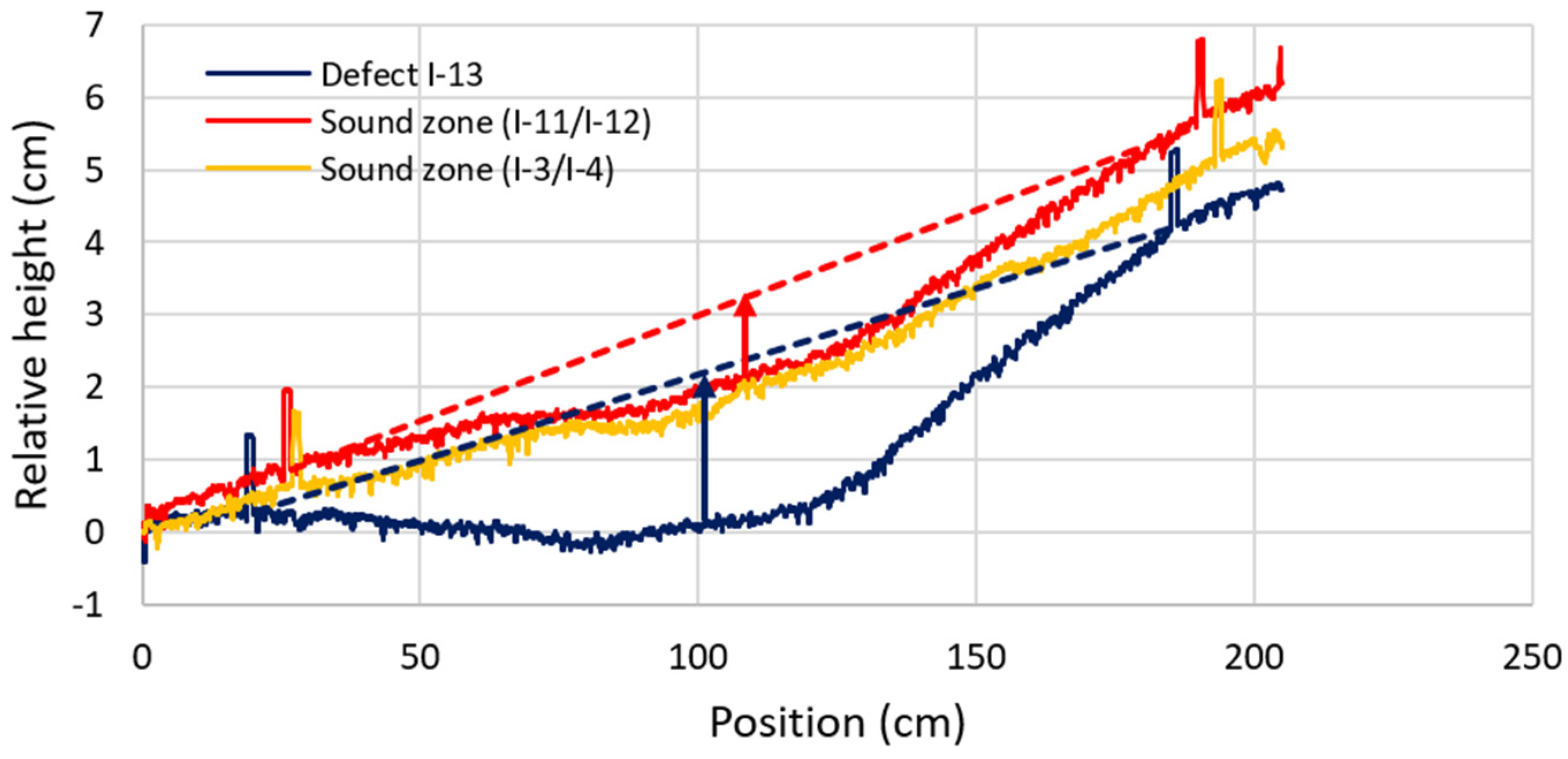
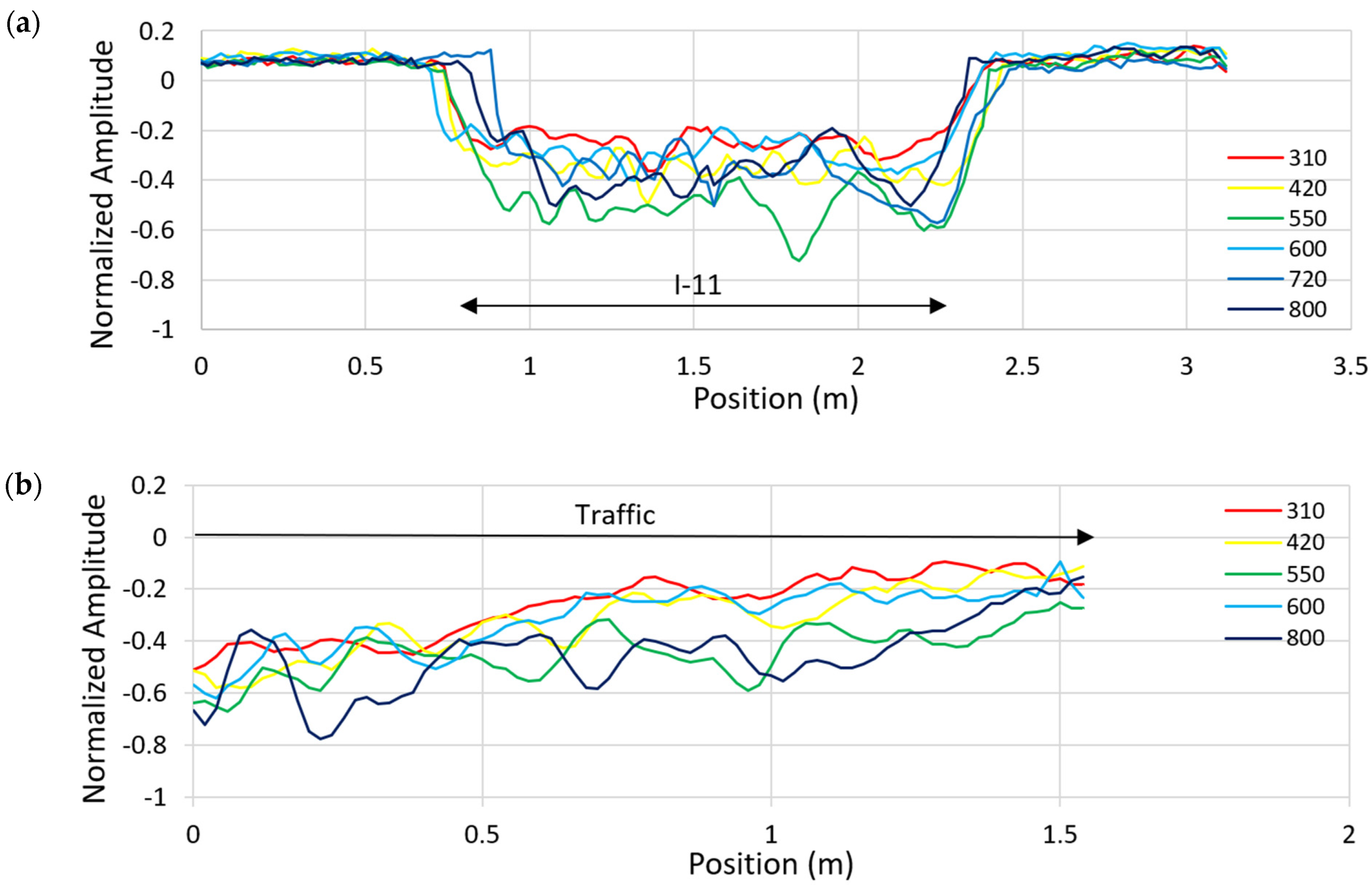
- Concerning the study of GPR direct waves, we observed a general tendency showing that degradation of the surface layer is visible by GPR measurements. A general tendency of decreaing DW amplitude vs. traffic is associated with the increase in micro-cracks, and then of water content of the medium.
- -
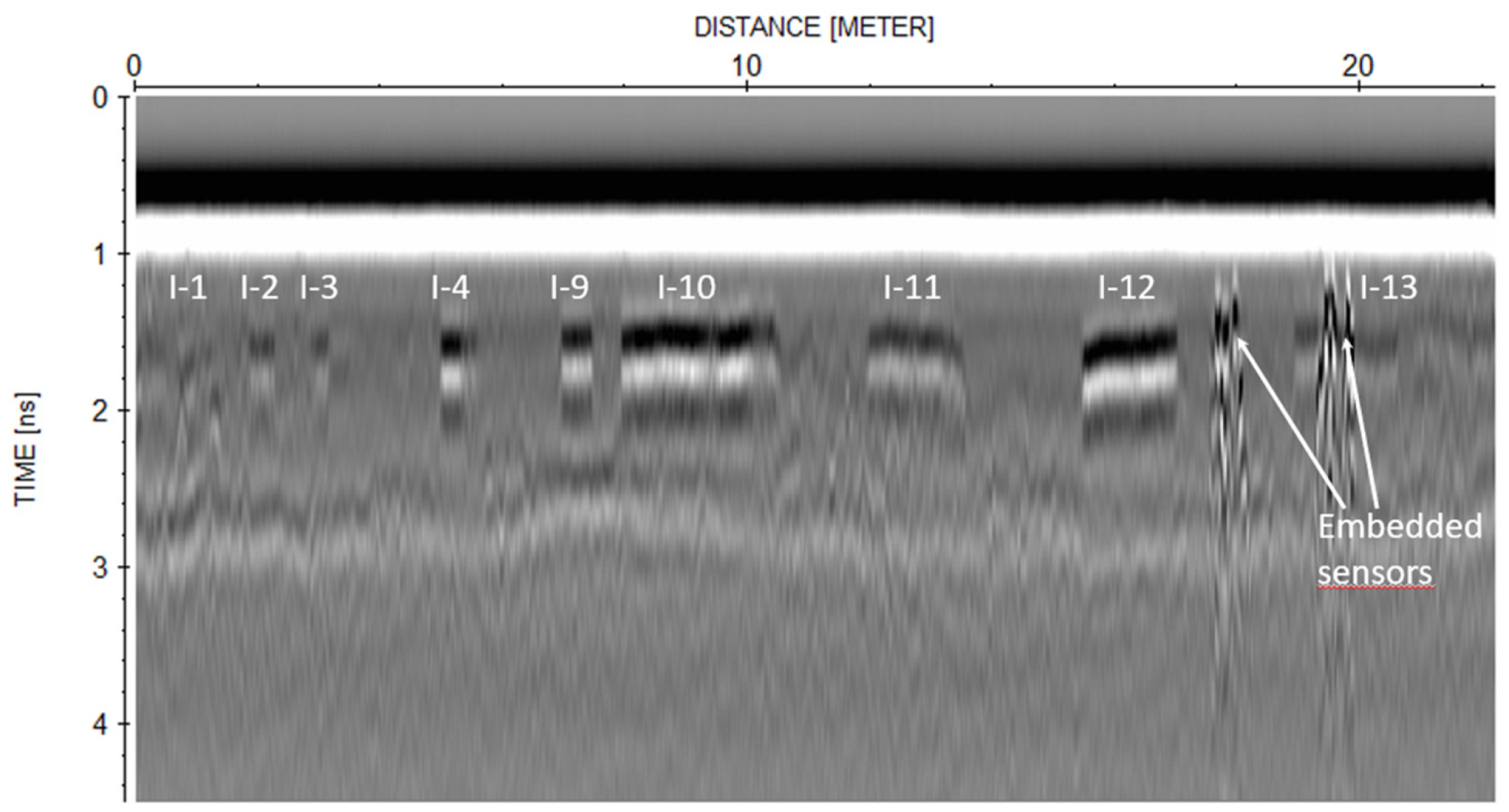
- At last, we observe that overall, the results are similar to those from SHRP-2 [9] if we do not consider the influence of the traffic. In this report, GPR results on full-scale road sections, from five radar systems, have shown that degraded zones (no bond and stripping, similar to defects I-13 and I-11) were not always detected, with the exception of after water ingress. Moreover, the choice of time-depth slices as a detection parameter is not optimal as thicknesses of layers are not perfectly constant and thus the extracted amplitudes may not correspond to a maximum of EM contrast. This problem is removed when picking the echoes at an interface (problem solved for the 3D-radar system in 2019, see Figure 10 and Figure 11).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A




Appendix B



Appendix C




Appendix D



References
- Baltazart, V.; Moliard, J.-M.; Amhaz, R.; Cottineau, L.-M.; Wright, A.; Wrigh, D.; Jethwa, M. Automatic Crack Detection on Pavement Images for Monitoring Road Surface Conditions—Some Results from the Collaborative FP7 TRIMM Project. In 8th RILEM International Conference on Mechanisms of Cracking and Debonding in Pavements; Springer: Dordrecht, The Netherlands, 2016; Volume 13, pp. 719–724. [Google Scholar] [CrossRef]
- Kruncheva, M.R.; Collop, A.C.; Thrn, N.H. Effect of bond condition on flexible pavement performance. J. Transp. Eng. 2005, 131, 880–888. [Google Scholar] [CrossRef]
- Gharbi, M.; Nguyen, M.L.; Chabot, A. Characterization of debonding at the interface between layers of heterogeneous materials coming from roads. In Proceedings of the Congrès Francçais de Mécanique, Lille, France, 28 August–1 September 2017. [Google Scholar]
- Saarenketo, T.; Scullion, T. Road evaluation with ground penetrating radar. J. Appl Geophys. 2000, 43, 119–139. [Google Scholar] [CrossRef]
- Plati, C.; Georgouli, K.; Loizos, A. A Review of NDT assessment of road pavements using GPR. RILEM Books 2012, 6, 855–860. [Google Scholar]
- Solla, M.; Lagüela, S.; Gonzalez, H.; Arias, P. Approach to identify cracking in asphalt pavement using GPR and infrared thermographic methods: Preliminary findings. NDT E Int. 2014, 62, 55–65. [Google Scholar]
- Marecos, V.; Solla, M.; Fontul, S.; Antunes, V. Assessing the pavement subgrade by combining different non-destructive methods. J. Constr. Build. Mat. 2017, 135, 76–85. [Google Scholar] [CrossRef]
- Lai, W.L.; Dérobert, X.; Annan, A.P. A review of ground penetrating radar application in civil engineering: A 30-year journey from locating, testing and evaluation to imaging and diagnosis. NDT E Int. 2018, 96, 58–78. [Google Scholar]
- Nondestructive Testing to Identify Delaminations between HMA Layers; SHRP-2 report S2-R06D-RW-3; Transportation Research Board: Washington, DC, USA, 2013; Volume 3, p. 146.
- Nondestructive Testing to Identify Delaminations between HMA Layers; SHRP-2 report S2-R06D-RW-4; Transportation Research Board: Washington, DC, USA, 2013; Volume 4, p. 158.
- Buttlar, W.; Chabot, A.; Dave, E.V.; Petit, C.; Tebaldi, G. RILEM State Art Reports. In Mechanisms of Cracking and Debonding in Asphalt and Composite Pavements; Springer: Cham, Germany, 2018; Volume 28, p. 237. [Google Scholar]
- Simonin, J.M.; Baltazart, V.; Hornych, P.; Kerzrého, J.P.; Dérobert, X.; Trichet, T.; Durand, O.; Alexandre, J.; Joubert, A. Detection of debonding and vertical cracks with ND techniques during accelerated tests. In Proceedings of the Accelerated Pavt Testing (APT) Conference, Davis, CA, USA, 19–21 September 2012. [Google Scholar]
- Simonin, J.M.; Hornych, P.; Baltazart, V.; Dérobert, X.; Thibaut, E.; Sala, J.; Utsi, V. Case study of detection of artificial defects in an experimental pavement structure using 3D GPR. In Proceedings of the GPR’2014 Congress, Brussels, Belgium, 30 June–4 July 2014. [Google Scholar]
- Simonin, J.M.; Baltazart, V.; Le Bastard, C.; Dérobert, X. Progress in monitoring the debonding within pavement structures during accelerated pavement testing on the Ifsttar’s fatigue carousel. In Proceedings of the 8th International RILEM Conference, Nantes, France, 7–9 June 2016. [Google Scholar]
- Todkar, S.; Le Bastard, C.; Baltazart, V.; Ihamouten, A.; Dérobert, X. Performance assessment of SVM-based classification techniques for the detection of artificial debondings within pavement structures from step-frequency A-scan radar data. NDT E Int. 2019, 107, 102128. [Google Scholar] [CrossRef]
- Derobert, X.; Baltazart, V.; Simonin, J.-M.; Durand, O.; Norgeot, C.; Doué, S. Radar database over large debonded areas. IFSTTAR 2020. [Google Scholar] [CrossRef]
- Derobert, X.; Baltazart, V.; Simonin, J.-M.; Hui, H.Y. Radar Database over Narrow Debonded Areas; Université Gustave Eiffel: Marne-la-Vallée, France, 2020. [Google Scholar] [CrossRef]
- Norgeot, C.; Dérobert, X.; Simonin, J.-M.; Doué, S.; Baltazart, V.; Hui, H.Y. 3D GPR monitoring of artificial debonded pavement structures during accelerated tests. In Proceedings of the GPR2020 Conference, Boulder, CO, USA, 14–19 June 2020. [Google Scholar]
- Villain, G.; Thiery, M. Gammadensimmetry: A method to determine drying. NDT E Int. 2006, 39, 328–337. [Google Scholar] [CrossRef]
- Plati, C.; Loizos, A. Estimation of in-situ density and moisture content in HMA pavements based on GPR trace reflection amplitude using different frequencies. J. Appl. Geophys. 2013, 97, 3–10. [Google Scholar] [CrossRef]













































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Type | Length (m) | Width (m) |
|---|---|---|---|
| I-1 | Sand | 0.5 | 2 |
| I-2 | Geotextile | 0.5 | 2 |
| I-3 | Tack-coat free | 0.5 | 2 |
| I-4 to I-9 | Geotextile | 0.5 | 0.5 |
| I10 | Geotextile | 3 | 0.5 |
| I-11 | Sand | 1.5 | 2 |
| I-12 | Geotextile | 1.5 | 2 |
| I-13 | Tack-coat free | 1.5 | 2 |
| Steps | Setting Parameters |
|---|---|
| Subtract DC-shift | Start time: 0 ns Stop time: 6 ns |
| Subtract mean (Dewow) | Time window: 3.5 ns |
| Bandpass filter | Lower cut-off: 520 MHz Upper cut-off: 5200 MHz |
| Remove header gain | Yes |
| K Loadings | 10 | 50 | 101 | 200 | 250 | 300 | 310 | 396 | 420 | 500 | 550 | 600 | 720 | 800 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| I-11 Length (m) | 1.35 | 1.46 | 1.43 | 1.45 | 1.48 | 1.46 | 1.54 | 1.55 | 1.57 | 1.55 | 1.56 | 1.54 | 1.58 | 1.57 |
| I-11 Manual length | 1.39 | 1.50 | 1.47 | 1.47 | 1.52 | 1.55 | 1.57 | 1.57 | 1.60 | 1.58 | 1.57 | 1.57 | 1.59 | 1.59 |
| I-11 av. Amplitude | 0.24 | 0.31 | 0.29 | 0.37 | 0.42 | 0.36 | 0.34 | 0.47 | 0.44 | 0.41 | 0.53 | 0.37 | 0.46 | 0.35 |
| I-12 Length (m) | 1.51 | 1.54 | 1.54 | 1.55 | 1.56 | 1.51 | 1.49 | 1.53 | 1.55 | 1.52 | 1.56 | 1.49 | 1.54 | 1.55 |
| I-12 Manual length | 1.53 | 1.55 | 1.56 | 1.57 | 1.59 | 1.53 | 1.51 | 1.56 | 1.61 | 1.58 | 1.61 | 1.63 | 1.61 | 1.60 |
| I-12 av. Amplitude | 0.40 | 0.72 | 0.61 | 0.64 | 0.61 | 0.46 | 0.44 | 0.52 | 0.52 | 0.46 | 0.53 | 0.51 | 0.51 | 0.46 |
| I-13 Length (m) | 1.44 | 1.67 | 1.63 | 1.62 | 1.62 | 1.52 | 1.61 | 1.61 | 1.63 | 1.59 | 1.64 | 1.65 | 1.64 | |
| I-13 Manual length | 1.54 | 1.69 | 1.71 | 1.69 | 1.71 | 1.70 | 1.52 | 1.63 | 1.63 | 1.65 | 1.68 | 1.65 | 1.68 | 1.69 |
| I-13 av. Amplitude | 0.25 | 0.27 | 0.28 | 0.28 | 0.31 | 0.18 | 0.24 | 0.26 | 0.24 | 0.24 | 0.22 | 0.29 | 0.23 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dérobert, X.; Baltazart, V.; Simonin, J.-M.; Todkar, S.S.; Norgeot, C.; Hui, H.-Y. GPR Monitoring of Artificial Debonded Pavement Structures throughout Its Life Cycle during Accelerated Pavement Testing. Remote Sens. 2021, 13, 1474. https://doi.org/10.3390/rs13081474
Dérobert X, Baltazart V, Simonin J-M, Todkar SS, Norgeot C, Hui H-Y. GPR Monitoring of Artificial Debonded Pavement Structures throughout Its Life Cycle during Accelerated Pavement Testing. Remote Sensing. 2021; 13(8):1474. https://doi.org/10.3390/rs13081474
Chicago/Turabian StyleDérobert, Xavier, Vincent Baltazart, Jean-Michel Simonin, Shreedhar Savant Todkar, Christophe Norgeot, and Ho-Yan Hui. 2021. "GPR Monitoring of Artificial Debonded Pavement Structures throughout Its Life Cycle during Accelerated Pavement Testing" Remote Sensing 13, no. 8: 1474. https://doi.org/10.3390/rs13081474
APA StyleDérobert, X., Baltazart, V., Simonin, J.-M., Todkar, S. S., Norgeot, C., & Hui, H.-Y. (2021). GPR Monitoring of Artificial Debonded Pavement Structures throughout Its Life Cycle during Accelerated Pavement Testing. Remote Sensing, 13(8), 1474. https://doi.org/10.3390/rs13081474