
Adaptive Waveform Design with Multipath Exploitation Radar in Heterogeneous Environments




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Proposed Solution
- the introduction section has been extended to provide the interested reader a better understanding of the state of the art in the research field of adaptive detection and waveform design;
- the contribution on adaptive target detection in heterogeneous environments with multipath exploitation radar and an optimal waveform, designed through a two-step process for the deduced detector, has been emphasized;
- the GLRT detection section includes a very detailed derivation and proof of the optimization problem and decision rules, so to allow interested readers to follow the derivation of the receiver thoroughly;
- a more detailed performance analysis has been carried out in terms of waveform and adaptive detectors, in particular:
- –
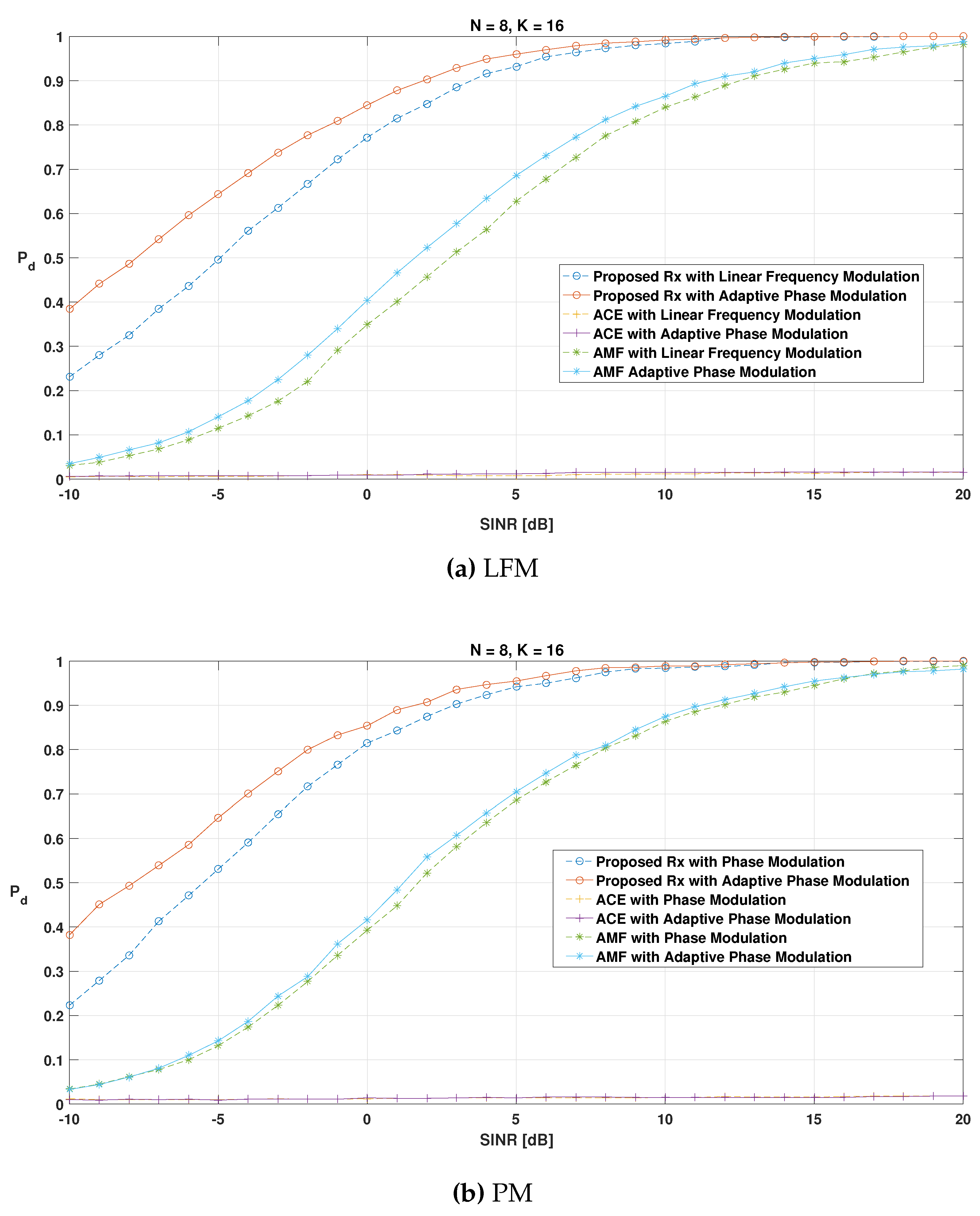
- both non-adaptive Linear Frequency Modulation (LFM) and Phase Modulated (PM) waveform cases in the sub-dwell one have been included;
- –
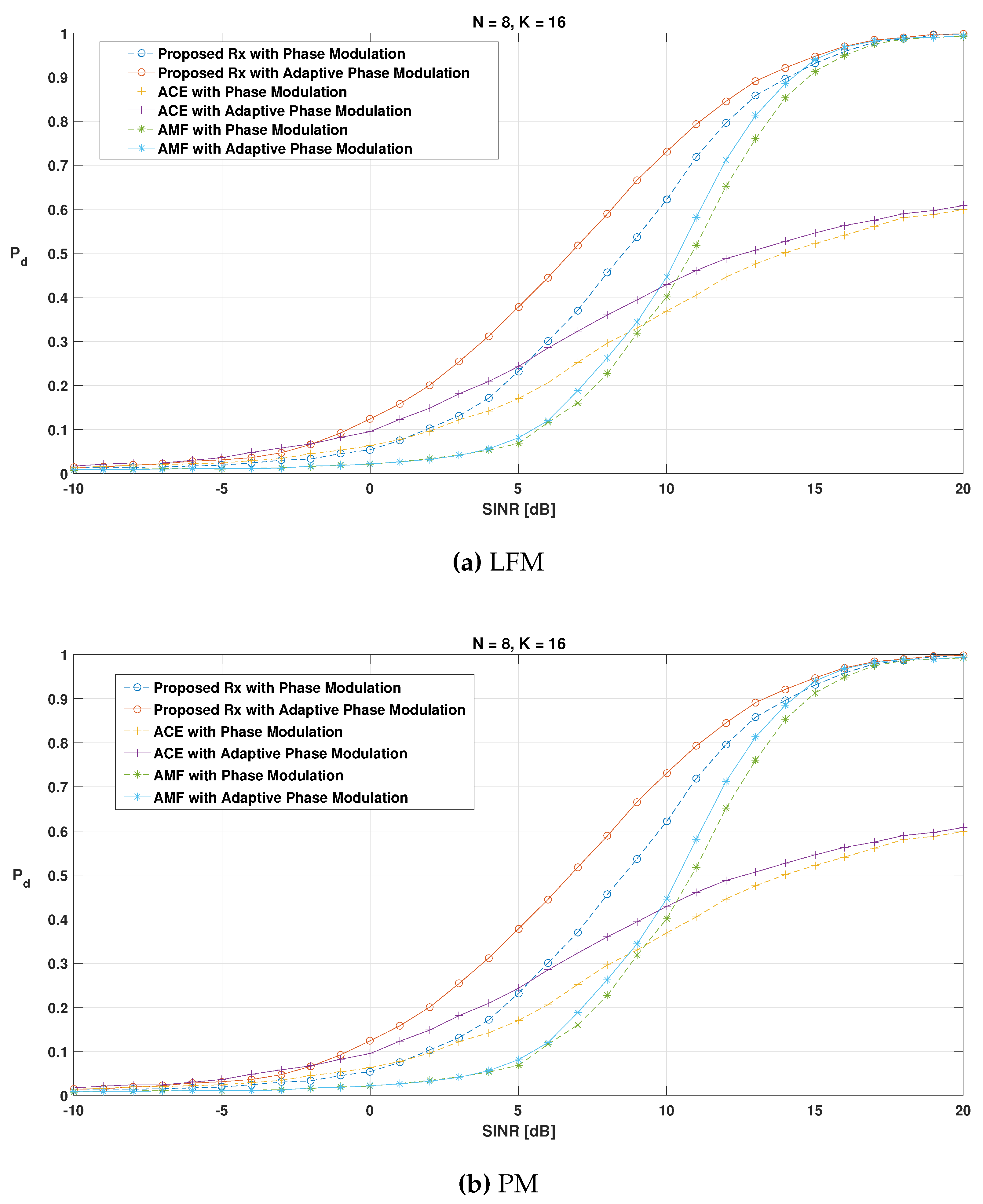
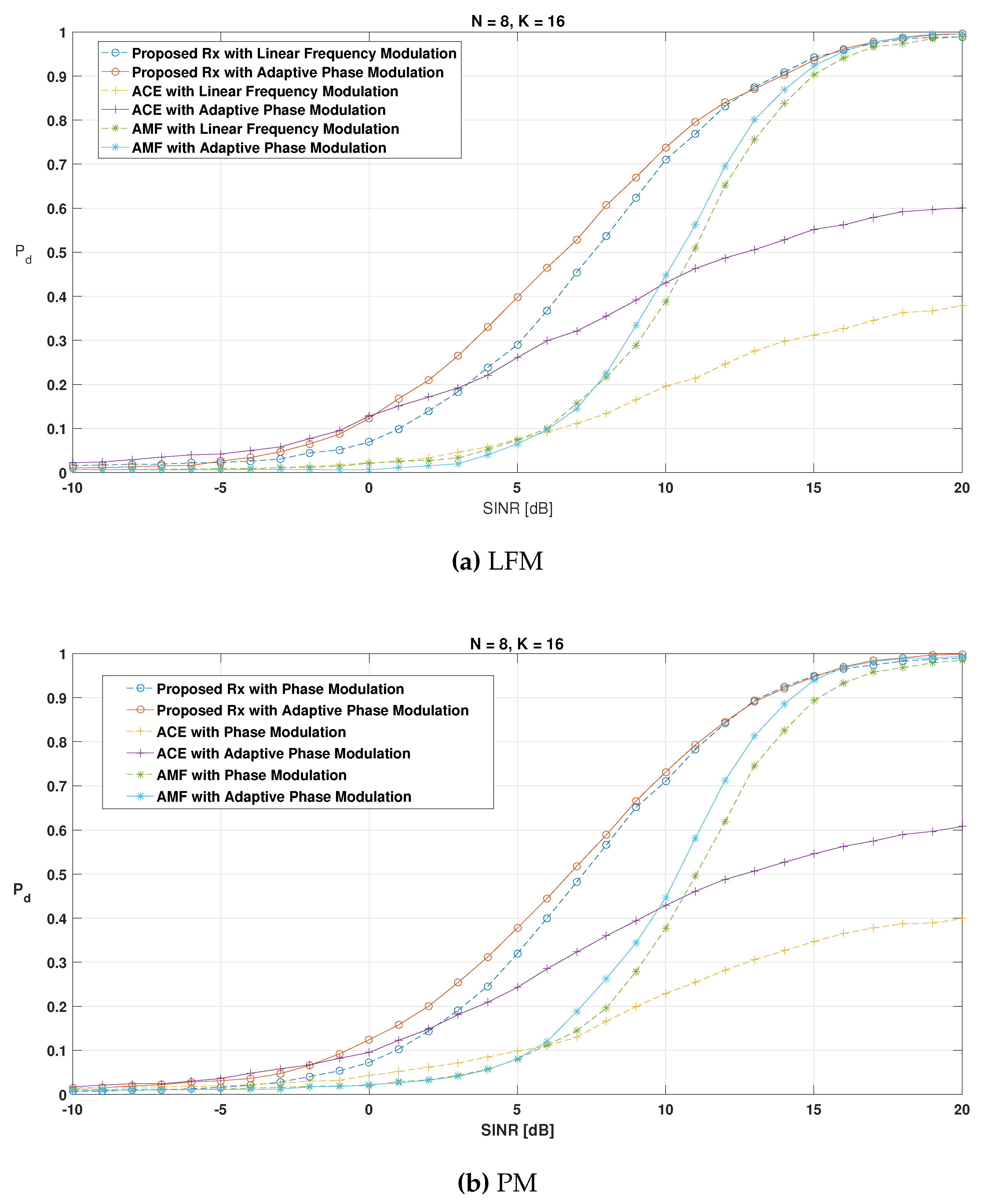
- in addition to the performance analysis for the case of LFM waveform in sub-dwell one and Adaptive PM waveform in sub-dwell two, the performance analysis with LFM waveform in both sub-dwell one and two has been included, in order to show the performance improvement of the adaptive waveform clearly;
- –
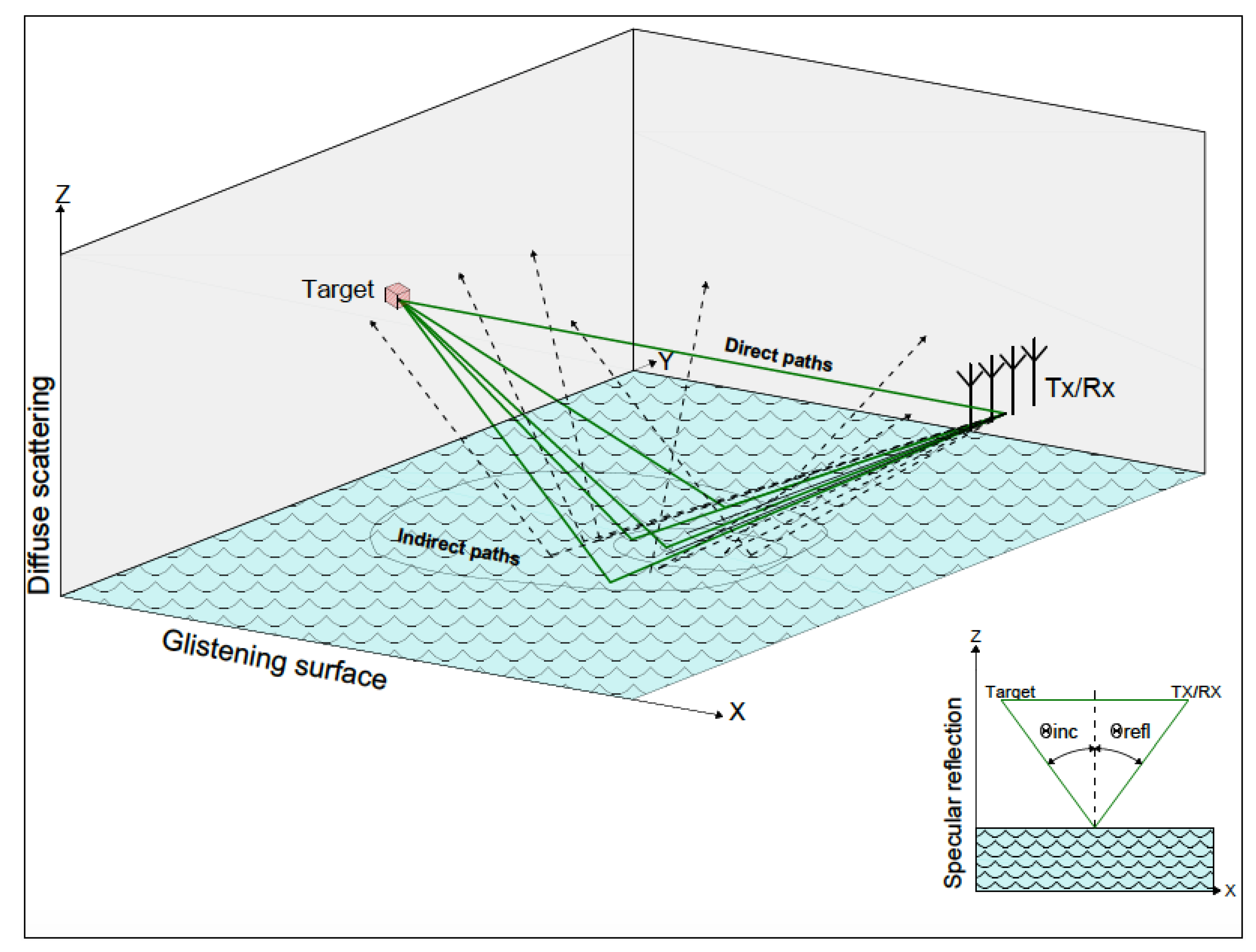
3. Theoretical Model and Assumptions
- is the received signal from the range cell under test (RCUT).
- is the secondary data set which is assumed to be free of target response.
- , is the target steering vector, and known for the line of sight path.
- is an unknown deterministic parameter accounting for both the line of sight channel propagation factor and target response to the incident wave.
- represent clutter, which is due to large number of independent scattering centers, in the primary and the secondary data, respectively. They are assumed to zero mean SIRVs, where SIRV is a special case of a compound-Gaussian process. It is defined as the product of independent zero-mean circular complex Gaussian vector, which is called speckle, and a non-negative scalar random variable, which is called texture [4,5]. Their respective covariance matrices are defined below.where is the covariance matrix of the speckle. It is assumed to be same for each range cell. Random variables are texture components representing relatively slow variations on the surface that can modulate the local mean power of the speckle. These texture components are assumed to be unknown deterministic parameters. Note that, the scattered clutter echoes from secondary data, which are assumed adjacent to and accordingly increase the disturbance power in the interested cell, are also considered while modeling the received signal from RCUT.
- is i.i.d. zero mean complex Gaussian vector with unknown covariance matrix, , and represents the diffuse multipath component of target response in multipath environment.
- , is the matched-filtered output at the ith range bin.
- is the length of the transmitted signal.
- is the index of the range bin that contains the target if target is present.
- is the auto-correlation function of the transmitted signal at lag m, and it is defined as the following equation.
4. The Model for the Clutter
5. A Constrained GLRT Detector
- ,
- .
- .
6. Design of the Waveform
7. Simulation Setup and Performance Analysis
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Farina, A.; Gini, F.; Greco, M.V.; Verrazzani, L. High resolution sea clutter data: Statistical analysis of recorded live data. IEE Proc. Radar Sonar Navig. 1997, 144, 121–130. [Google Scholar] [CrossRef]
- Farina, A.; Russo, A.; Scannapieco, F. Radar detection of target signals in non Gaussian clutter-Theory and applications. In Proceedings of the International Conference on Radar, Toronto, ON, Canada, 11–15 August 1986; pp. 442–449. [Google Scholar]
- Sangston, K.J.; Gerlach, K.R. Coherent detection of radar targets in a non-gaussian background. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 330–340. [Google Scholar] [CrossRef]
- Conte, E.; Longo, M. Characterisation of radar clutter as a spherically invariant random process. IEE Proc. Commun. Radar Signal Process. 1987, 134, 191–197. [Google Scholar] [CrossRef]
- Conte, E.; Longo, M.; Lops, M. Modelling and simulation of non-Rayleigh radar clutter. IEE Proc. Radar Signal Process. 1991, 138, 121–130. [Google Scholar] [CrossRef]
- Conte, E.; Lops, M.; Ullo, S. A new model for coherent Weibull clutter. Radar 89 1989, 2, 482–487. [Google Scholar]
- Conte, E.; Longo, M.; Lops, M.; Ullo, S.L. Radar detection of signals with unknown parameters in K-distributed clutter. IEE Proc. Radar Signal Process. 1991, 138, 131–138. [Google Scholar] [CrossRef] [Green Version]
- Conte, E.; De Maio, A.; Galdi, C. Statistical analysis of real clutter at different range resolutions. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 903–918. [Google Scholar] [CrossRef]
- Hayvaci, H.T.; De Maio, A.; Erricolo, D. Diversity in receiving strategies based on time-delay analysis in the presence of multipath. In Proceedings of the 2011 IEEE Radar Conference (RADAR), Kansas City, MI, USA, 24–27 October 2011; pp. 1040–1045. [Google Scholar] [CrossRef] [Green Version]
- Hayvaci, H.T.; De Maio, A.; Erricolo, D. Performance analysis of diverse GLRT detectors in the presence of multipath. In Proceedings of the 2012 IEEE Radar Conference, Atlanta, Georgia, 7–11 May 2012; pp. 0902–0906. [Google Scholar] [CrossRef]
- Hayvaci, H.T.; Setlur, P.; Devroye, N.; Erricolo, D. Maximum likelihood time delay estimation and Cramér-Rao bounds for multipath exploitation. In Proceedings of the 2012 IEEE Radar Conference, Atlanta, Georgia, 7–11 May 2012; pp. 0764–0768. [Google Scholar] [CrossRef]
- Hayvaci, H.T.; Erricolo, D. Improved radar target time-delay estimation with multipath exploitation. In Proceedings of the 2013 International Conference on Electromagnetics in Advanced Applications (ICEAA), Torino, Italy, 9–13 September 2013; pp. 1232–1235. [Google Scholar] [CrossRef]
- Fertig, L.B.; Baden, M.J.; Kerce, J.C.; Sobota, D. Localization and tracking with Multipath Exploitation Radar. In Proceedings of the 2012 IEEE Radar Conference, Atlanta, GA, USA, 7–11 May 2012; pp. 1014–1018. [Google Scholar] [CrossRef]
- Hayvaci, H.T.; De Maio, A.; Erricolo, D. Improved detection probability of a radar target in the presence of multipath with prior knowledge of the environment. IET Radar Sonar Navig. 2013, 7, 36–46. [Google Scholar] [CrossRef]
- Kumbul, U.; Hayvaci, H.T. Knowledge-Aided Adaptive Detection with Multipath Exploitation Radar. In Proceedings of the 2016 Sensor Signal Processing for Defence (SSPD), Edinburgh, Scotland, 22–23 September 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Kumbul, U.; Hayvaci, H.T. Multipath exploitation for knowledge-aided adaptive target detection. IET Radar Sonar Navig. 2019, 13, 863–870. [Google Scholar] [CrossRef]
- Aubry, A.; De Maio, A.; Foglia, G.; Orlando, D. Diffuse Multipath Exploitation for Adaptive Radar Detection. IEEE Trans. Signal Process. 2015, 63, 1268–1281. [Google Scholar] [CrossRef]
- Rong, Y.; Aubry, A.; De Maio, A.; Tang, M. Diffuse Multipath Exploitation for Adaptive Detection of Range Distributed Targets. IEEE Trans. Signal Process. 2020, 68, 1197–1212. [Google Scholar] [CrossRef]
- Hayvaci, H.T.; Gulen, S.H. Adaptive Detection with Diffuse Multipath Exploitation in Partially Homogeneous Environments. In Proceedings of the 2019 Sensor Signal Processing for Defence Conference (SSPD), Brighton, UK, 9–10 May 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Hayvaci, H.; Gulen, S.H. Multipath Exploitation Radar with Adaptive Detection in Partially Homogeneous Environments. IET Radar Sonar Navig. 2020, 14, 1475–1482. [Google Scholar] [CrossRef]
- Zhang, Z.J.; Liu, J.; Zhao, Y.; Cao, Y. False alarm rate of the GLRT-LQ detector in non-Gaussian and heterogeneous clutter. Aerosp. Sci. Technol. 2015, 47, 191–194. [Google Scholar] [CrossRef]
- Gustafson, S.C.; James, E.A.; Terzuoli, A.J.; Weidenhammer, L.N.; Barnes, R.I. Non-Gaussian clutter characterization applied to OTHR using a mixture of two Rayleigh probability density functions. Adv. Space Res. 2009, 44, 663–666. [Google Scholar] [CrossRef]
- Xue, J.; Xu, S.; Shui, P. Knowledge-based target detection in compound Gaussian clutter with inverse Gaussian texture. Digit. Signal Process. 2019, 95, 102590. [Google Scholar] [CrossRef]
- Farina, A.; Russo, A.; Studer, F.A. Advanced Models of Targets, Disturbances and Related Radar Signal Processors. In Proceedings of the IEEE International Radar Conference, Washington, DC, USA, 6–9 May 1985; pp. 151–158. [Google Scholar]
- Aluffi Pentini, F.; Farina, A.; Zirilli, F. Radar detection of targets located in a coherent K distributed clutter background. IEE Proc. Radar Signal Process. 1992, 139, 239–245. [Google Scholar] [CrossRef]
- Sangston, K.J.; Gini, F.; Greco, M.V.; Farina, A. Structures for radar detection in compound Gaussian clutter. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 445–458. [Google Scholar] [CrossRef]
- Haykin, S. Cognitive radar: A way of the future. IEEE Signal Process. Mag. 2006, 23, 30–40. [Google Scholar] [CrossRef]
- Guerci, G.R. Cognitive Radar: The Knowledge-Aided Fully Adaptive Approach, 2nd ed.; Artech House: Norwood, MA, USA, 2020. [Google Scholar]
- Aubry, A.; Carotenuto, V.; De Maio, A.; Farina, A.; Pallotta, L. Optimization theory-based radar waveform design for spectrally dense environments. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 14–25. [Google Scholar] [CrossRef]
- Zhang, L.; Wei, N.; Du, X. Waveform Design for Improved Detection of Extended Targets in Sea Clutter. Sensors 2019, 19, 3957. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sira, S.P.; Cochran, D.; Papandreou-Suppappola, A.; Morrell, D.; Moran, W.; Howard, S.D.; Calderbank, R. Adaptive Waveform Design for Improved Detection of Low-RCS Targets in Heavy Sea Clutter. IEEE J. Sel. Top. Signal Process. 2007, 1, 56–66. [Google Scholar] [CrossRef]
- Li, Y.; Sira, S.P.; Papandreou-Suppappola, A.; Cochran, D.; Scharf, L.L. Maximizing Detection Performance with Waveform Design for Sensing in Heavy Sea Clutter. In Proceedings of the 2007 IEEE/SP 14th Workshop on Statistical Signal Processing, Madison, WI, USA, 19–26 August 2007; pp. 249–253. [Google Scholar]
- Zhang, T.; Kong, L.; Yang, X.; Shuai, X. Adaptive waveform design for detecting distributed target in heavy sea clutter. In Proceedings of the 2011 IEEE CIE International Conference on Radar, Chengdu, China, 24–27 October 2011; Volume 1, pp. 572–575. [Google Scholar]
- Wang, H.; Shi, L.; Wang, Y.; Ben, D. A novel target detection approach based on adaptive radar waveform design. Chin. J. Aeronaut. 2013, 26, 194–200. [Google Scholar] [CrossRef] [Green Version]
- Ullo, S.L. Evolution of Cognitive Radars Toward Intelligent Systems Architectures. In Proceedings of the 2018 5th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Rome, Italy, 20–22 June 2018; pp. 334–339. [Google Scholar]
- Farina, A.; De Maio, A.; Haykin, S. The Impact of Cognition on Radar Technology; Scitech Publishing: Edison, NJ, USA, 2017. [Google Scholar]
- Addabbo, P.; Aubry, A.; De Maio, A.; Pallotta, L.; Ullo, S.L. High Resolution Range Profiling for Stepped Radar via Sparsity Exploitation. In Proceedings of the 2018 5th International Workshop on Compressed Sensing Applied to Radar, Multimodal Sensing, and Imaging (CoSeRa), Siegen, Germany, 10–13 September 2018. [Google Scholar]
- Addabbo, P.; Aubry, A.; De Maio, A.; Pallotta, L.; Ullo, S.L. HRR profile estimation using SLIM (High Range Resolution Profile Estimation using Sparse Learning via Iterative Minimization). IET Rarad Sonar Navig. 2018, 13, 512–521. [Google Scholar] [CrossRef]
- Conte, E.; De Maio, A.; Ricci, G. Recursive estimation of the covariance matrix of a compound-Gaussian process and its application to adaptive CFAR detection. IEEE Trans. Signal Process. 2002, 50, 1908–1915. [Google Scholar] [CrossRef]
- De Maio, A.; Greco, M. Modern Radar Detection Theory; Electromagnetics and Radar; Institution of Engineering and Technology: London, UK, 2015. [Google Scholar]
- Conte, E.; De Maio, A.; Galdi, C. CFAR detection of multidimensional signals: An invariant approach. IEEE Trans. Signal Process. 2003, 51, 142–151. [Google Scholar] [CrossRef]
- Aubry, A.; De Maio, A.; Pallotta, L.; Farina, A. Maximum Likelihood Estimation of a Structured Covariance Matrix With a Condition Number Constraint. IEEE Trans. Signal Process. 2012, 60, 3004–3021. [Google Scholar] [CrossRef]
- Aubry, A.; De Maio, A.; Pallotta, L.; Farina, A. Radar Detection of Distributed Targets in Homogeneous Interference Whose Inverse Covariance Structure is Defined via Unitary Invariant Functions. IEEE Trans. Signal Process. 2013, 61, 4949–4961. [Google Scholar] [CrossRef]
- Kang, B.; Monga, V.; Rangaswamy, M. Rank-Constrained Maximum Likelihood Estimation of Structured Covariance Matrices. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 501–515. [Google Scholar] [CrossRef]
- Yilmaz, S.H.G.; Zarro, C.; Hayvaci, H.T.; Liberata Ullo, S. A Two-Step Process for a Cognitive Radar Waveform Design with Multipath Exploitation. In Proceedings of the 2020 IEEE 7th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 22–24 June 2020; pp. 166–170. [Google Scholar] [CrossRef]
- Robey, F.C.; Fuhrmann, D.R.; Kelly, E.J.; Nitzberg, R. A CFAR adaptive matched filter detector. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 208–216. [Google Scholar] [CrossRef] [Green Version]
- Kraut, S.; Scharf, L.L. The CFAR adaptive subspace detector is a scale-invariant GLRT. IEEE Trans. Signal Process. 1999, 47, 2538–2541. [Google Scholar] [CrossRef] [Green Version]
- Boyd, S.; Boyd, S.P.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Barbarossa, S.; Farina, A. Space-time-frequency processing of synthetic aperture radar signals. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 341–358. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yilmaz, S.H.G.; Zarro, C.; Hayvaci, H.T.; Ullo, S.L. Adaptive Waveform Design with Multipath Exploitation Radar in Heterogeneous Environments. Remote Sens. 2021, 13, 1628. https://doi.org/10.3390/rs13091628
Yilmaz SHG, Zarro C, Hayvaci HT, Ullo SL. Adaptive Waveform Design with Multipath Exploitation Radar in Heterogeneous Environments. Remote Sensing. 2021; 13(9):1628. https://doi.org/10.3390/rs13091628
Chicago/Turabian StyleYilmaz, Seden Hazal Gulen, Chiara Zarro, Harun Taha Hayvaci, and Silvia Liberata Ullo. 2021. "Adaptive Waveform Design with Multipath Exploitation Radar in Heterogeneous Environments" Remote Sensing 13, no. 9: 1628. https://doi.org/10.3390/rs13091628
APA StyleYilmaz, S. H. G., Zarro, C., Hayvaci, H. T., & Ullo, S. L. (2021). Adaptive Waveform Design with Multipath Exploitation Radar in Heterogeneous Environments. Remote Sensing, 13(9), 1628. https://doi.org/10.3390/rs13091628