
The CYGNSS Mission: On-Going Science Team Investigations

 ,
,  , ,
, ,  and
and
Abstract
1. Introduction
2. Methodology, Results, and Discussions
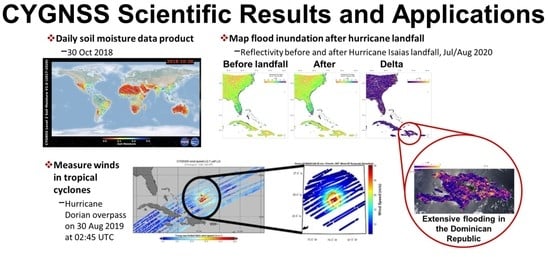
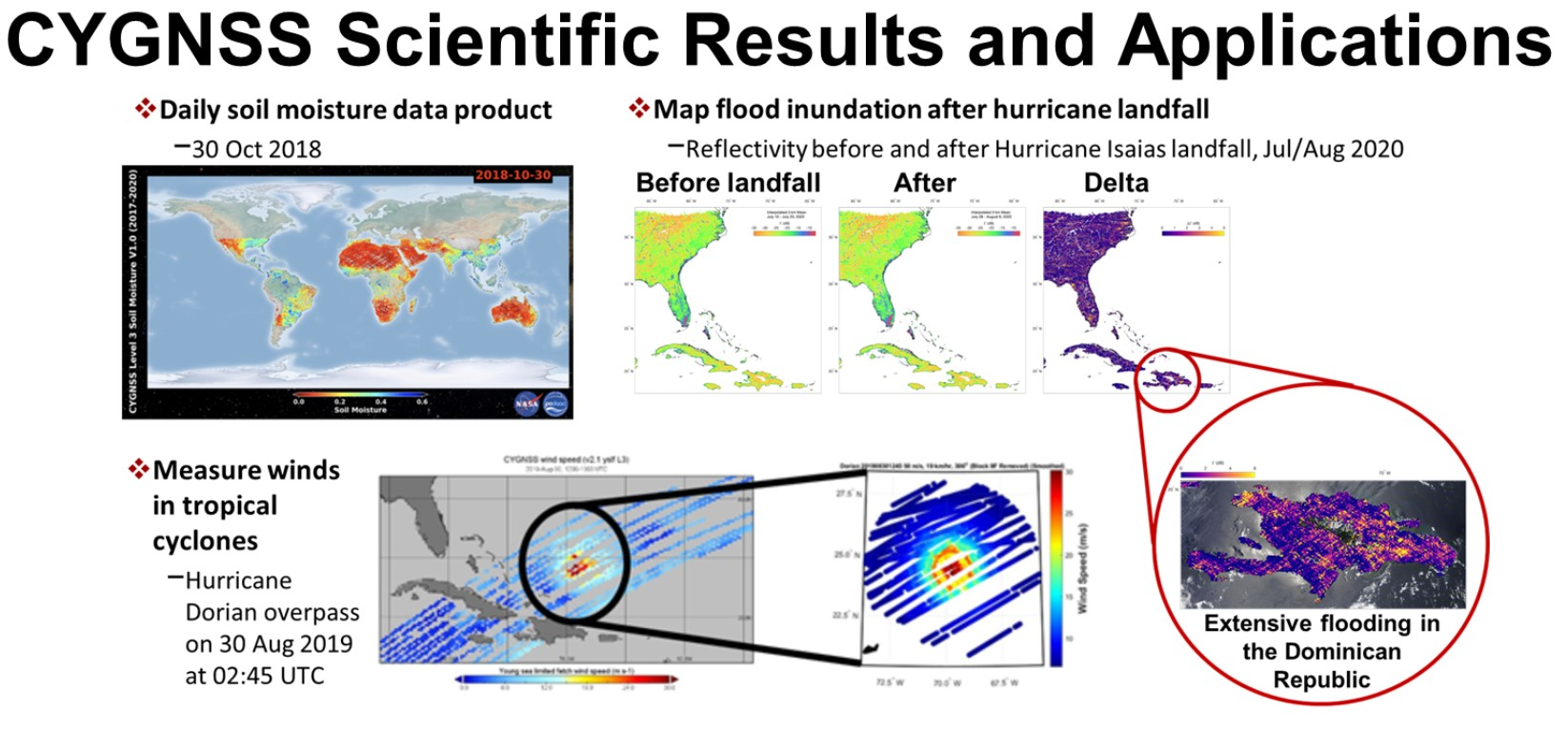
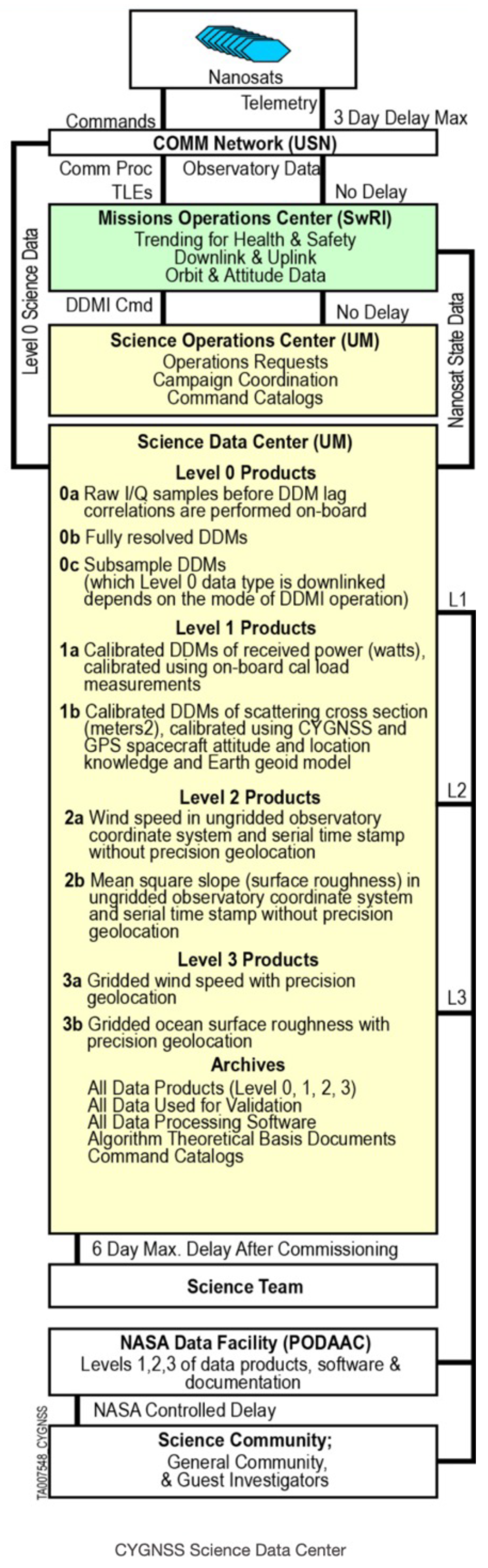
2.1. Data Products
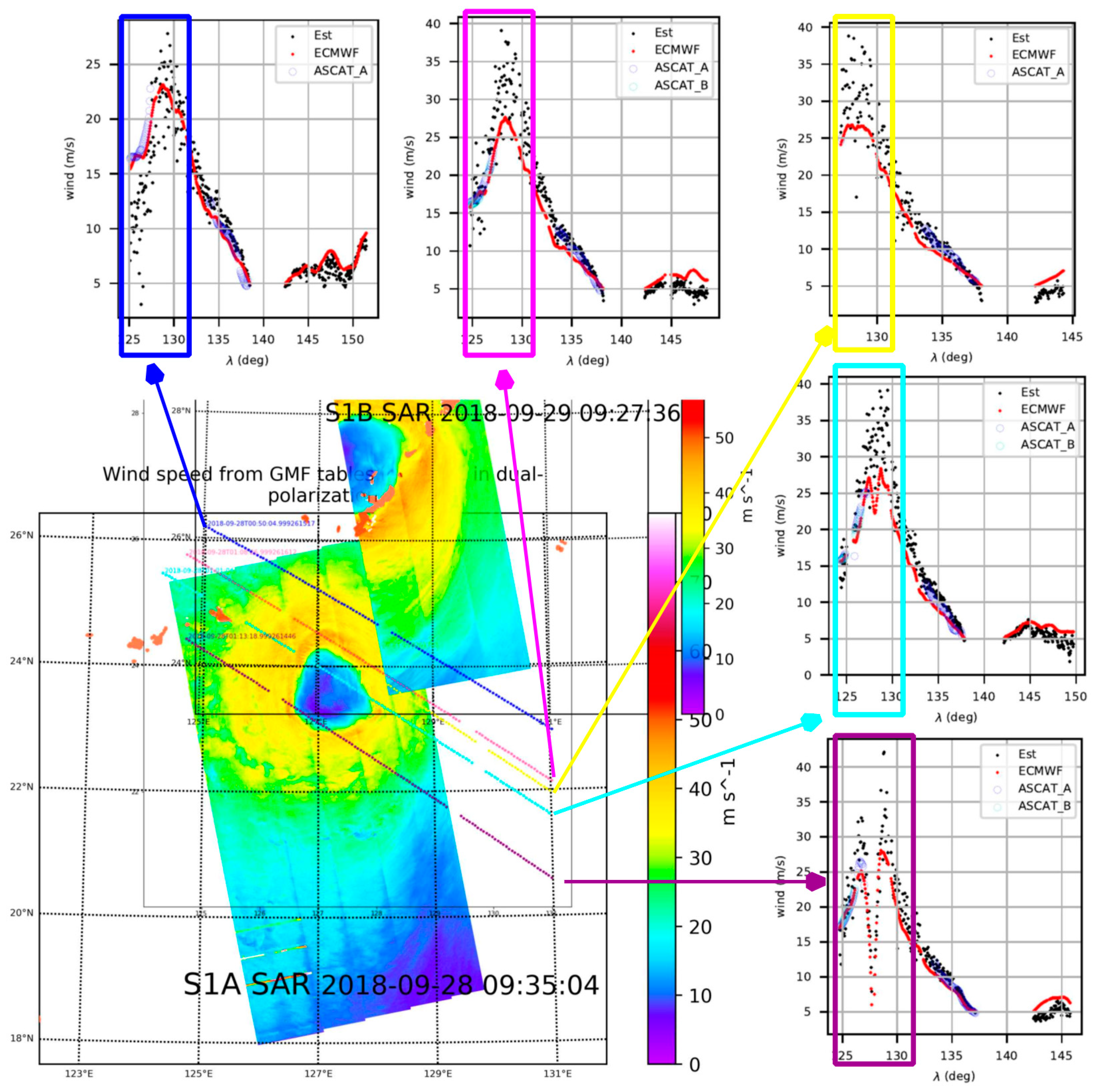
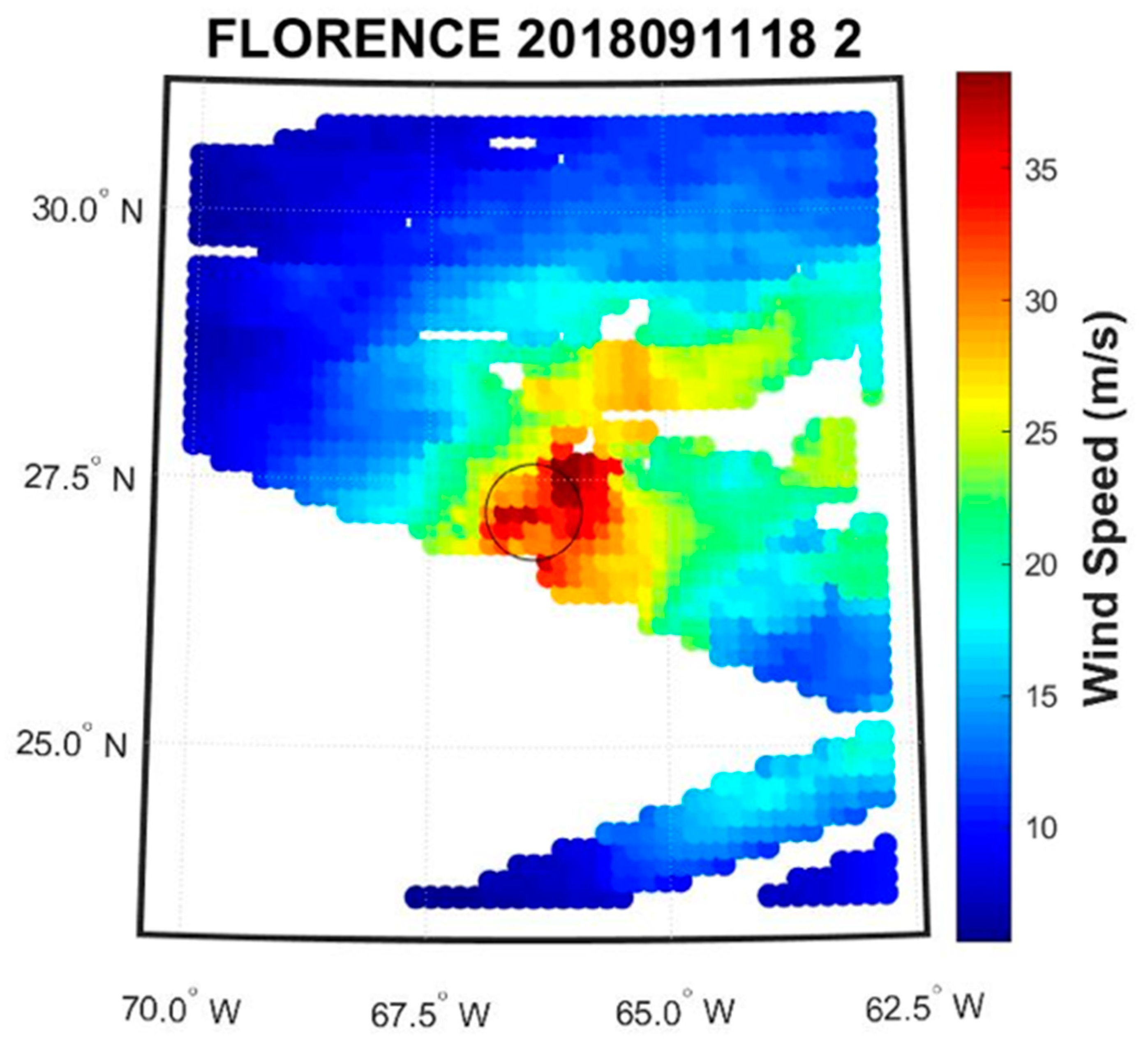
- Traditional remote sensing techniques are blind to much of the inner core ocean surface when intense precipitation is in the eye wall and inner rain bands.
- Traditional high-inclination orbit and wide-swath surface wind imagers do not provide an enough temporal sampling of the dynamically evolving (genesis and rapid intensification) phases of the TCs life cycle.
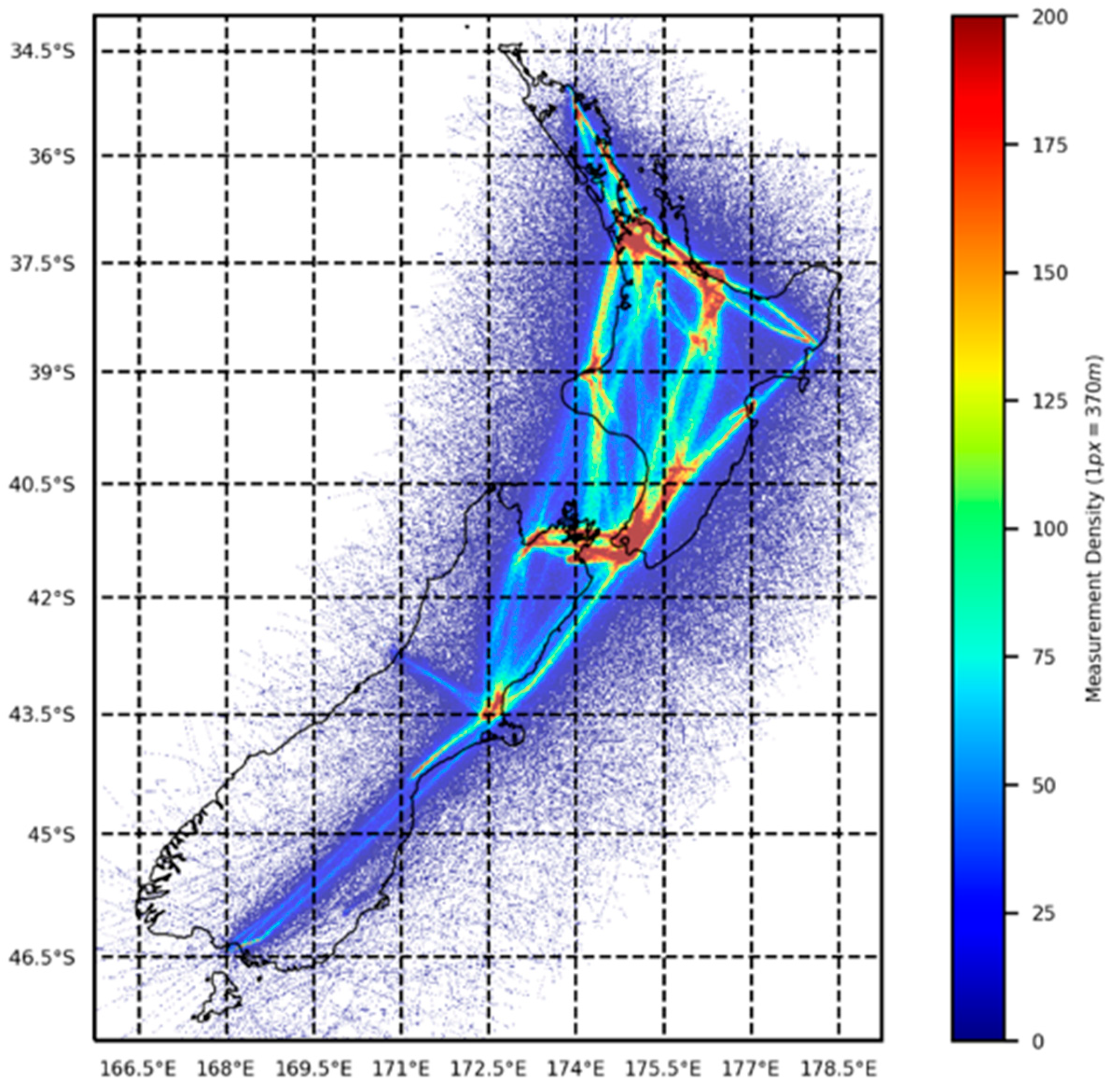
2.2. Land Surfaces
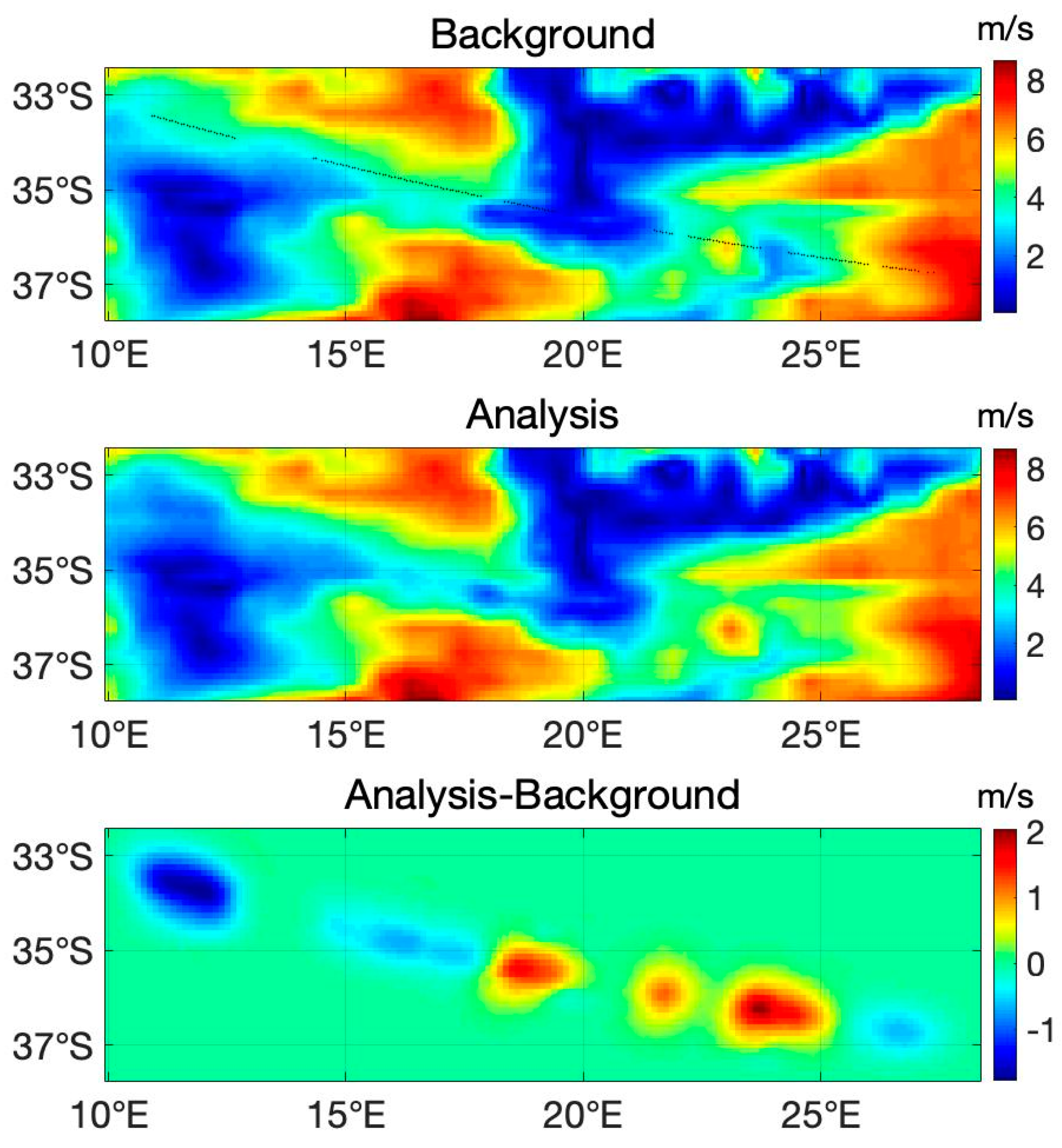
2.3. Ocean Surfaces
3. Conclusions and Final Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Acronyms
| Above Ground Biomass (AGB) |
| Advanced Land Observing Satellite-2 (ALOS-2) |
| Advanced Microwave Scanning Radiometer (AMSR-2) |
| Advanced SCATterometer (ASCAT) |
| Artificial Neural Network (ANN) |
| Bistatic Radar Cross Section (BRCS) |
| Climate Data Record (CDR) |
| Contiguous United States (CONUS) |
| Cyclone Global Navigation Satellite System (CYGNSS) |
| Delay Doppler Map (DDM) |
| Delay Doppler Mapping Instrument (DDMI) |
| Digital Elevation Model (DEM) |
| Disaster Monitoring System-1 (DMC-1) |
| Earth Observation (EO) |
| Earth System Science Pathfinder (ESSP) |
| End-to-End Simulator (E2ES) |
| European Centre for Medium-Range Weather Forecasts (ECMWF) |
| European Space Agency (ESA) |
| Flight Model (FM) |
| Food and Agriculture Organization (FAO) |
| Fully Developed Seas (FDS) |
| Physical Oceanography Distributed Active Archive Center (PODAAC) |
| Geophysical Model Function (GMF) |
| Global Forecast System (GFS) |
| Global Navigation Satellite Systems (GNSS) |
| Global Positioning System (GPS) |
| Institute of Space Sciences (ICE) |
| Institute of Space Studies of Catalonia (IEEC) |
| Intermediate Frequency (IF) |
| International Soil Moisture Network (ISMN) |
| Jet Propulsion Laboratory (JPL) |
| Land Information Systems (LIS) |
| Low Earth Orbit (LEO) |
| Madden Julian Oscillation (MJO) |
| Maxwell Model 3D (NMM3D) |
| Mean-Square Slope (MSS) |
| Modern-Era Retrospective analysis for Research and Applications (MERRA-2) |
| Multi-satellitE Retrievals for GPM (IMERG) |
| National Aeronautics and Space Administration (NASA) |
| NASA-ISRO (NISAR) |
| National Oceanic and Atmospheric Administration (NOAA) |
| Normalized Difference Vegetation Index (NVDI) |
| OceanSat Scatterometer (OSCAT) |
| Pseudo-Random Noise (PRN) Research Opportunities in Space and Earth Science (ROSES) |
| Science Data Record (SDR) |
| Signal-to-Noise Ratio (SNR) |
| Soil Moisture Active Passive (SMAP) |
| Soil Moisture Content (SMC) |
| Soil Moisture Ocean Salinity (SMOS) Space-borne Imaging Radar-C (SIR-C) |
| Synthetic Aperture Radar (SAR) |
| TechDemoSat-1 (TDS-1) |
| Tropical Cyclone (TC) |
| United Kingdom (UK) United Nations (UN) |
| University Corporation for Atmospheric Research (UCAR) University of Michigan (UM) Vegetation Optical Depth (VOD) |
| Vegetation Water Content (VWC) |
| Visible Infrared Imaging Radiometer Suite (VIRRS) |
| Wave-Watch 3 (WW3) |
| Young Sea/Limited Fetch (YSLF) |
References
- Ruf, C.; Unwin, M.; Dickinson, J.; Rose, R.; Rose, D.; Vincent, M.; Lyons, A. CYGNSS: Enabling the Future of Hurricane Prediction [Remote Sensing Satellites]. IEEE Geosci. Remote Sens. Mag. 2013, 1, 52–67. [Google Scholar] [CrossRef]
- Ruf, C.; Chang, P.S.; Clarizia, M.P.; Gleason, S.; Jelenak, Z.; Majumdar, S.; Morris, M.; Murray, J.; Musko, S.; Posselt, D.; et al. CYGNSS Handbook. Cyclone Global Navigation Satellite System; Michigan Publishing: Ann Arbor, MI, USA, 2016; Available online: https://clasp-research.engin.umich.edu/missions/cygnss/reference/cygnss-mission/CYGNSS_Handbook_April2016.pdf (accessed on 2 February 2021).
- Ruf, C.; Atlas, R.; Chang, P.S.; Clarizia, M.P.; Garrison, J.L.; Gleason, S.; Katzberg, S.J.; Jelenak, Z.; Johnson, J.T.; Majumdar, S.J.; et al. New Ocean Winds Satellite Mission to Probe Hurricanes and Tropical Convection. Bull. Am. Meteorol. Soc. 2015, 97, 385–395. [Google Scholar] [CrossRef]
- Ruf, C.; Cardellach, E.; Clarizia, M.P.; Galdi, C.; Gleason, S.T.; Paloscia, S. Foreword to the Special Issue on Cyclone Global Navigation Satellite System (CYGNSS) Early on Orbit Performance. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3–6. [Google Scholar] [CrossRef]
- Ruf, C.; Asharaf, S.; Balasubramaniam, R.; Gleason, S.; Lang, T.; McKague, D.; Twigg, D.; Waliser, D. In-Orbit Performance of the Constellation of CYGNSS Hurricane Satellites. Bull. Am. Meteorol. Soc. 2019, 100, 2009–2023. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Luzi, G.; Crosetto, M. Sensitivity of CYGNSS Bistatic Reflectivity and SMAP Microwave Radiometry Brightness Temperature to Geophysical Parameters over Land Surfaces. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 107–122. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Luzi, G.; Crosetto, M. Above-Ground Biomass Retrieval over Tropical Forests: A Novel GNSS-R Approach with CyGNSS. Remote Sens. 2020, 12, 1368. [Google Scholar] [CrossRef]
- Warnock, A.; Ruf, C. Response to Variations in River Flowrate by a Spaceborne GNSS-R River Width Estimator. Remote Sens. 2019, 11, 2450. [Google Scholar] [CrossRef]
- Martin-Neira, M. A Passive Reflectometry and Interferometry System (PARIS): Application to Ocean Altimetry. ESA J. 1993, 17, 331–355. [Google Scholar]
- Lowe, S.T.; Labrecque, J.L.; Zuffada, C.; Romans, L.J.; Young, L.E.; Hajj, G.A. First spaceborne observation of an Earth-reflected GPS signal. Radio Sci. 2002, 37, 7–1–7–28. [Google Scholar] [CrossRef]
- Gleason, S.; Hodgart, S.; Sun, Y.; Gommenginger, C.; Mackin, S.; Adjrad, M.; Unwin, M. Detection and Processing of bistatically reflected GPS signals from low Earth orbit for the purpose of ocean remote sensing. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1229–1241. [Google Scholar] [CrossRef]
- Unwin, M.; Jales, P.; Blunt, P.; Duncan, S. Preparation for the First Flight of SSTL’s Next Generation Space GNSS Receivers. In Proceedings of the 6th ESA/European Workshop Satellite NAVITEC GNSS Signals Signal Processor, Noordwijk, The Netherlands, 5–7 December 2012; pp. 1–6. [Google Scholar]
- Carreno-Luengo, H.; Lowe, S.; Zuffada, C.; Esterhuizen, S.; Oveisgharan, S. Spaceborne GNSS-R from the SMAP Mission: First Assessment of Polarimetric Scatterometry over Land and Cryosphere. Remote Sens. 2017, 9, 362. [Google Scholar] [CrossRef]
- CYGNSS Mission Teams. Available online: https://clasp-research.engin.umich.edu/missions/cygnss/mission-teams.php (accessed on 3 March 2021).
- Ruf, C.; Gleason, S.; Jelenak, Z.; Katzberg, S.; Ridley, A.; Rose, R.; Scherrer, J.; Zavorotny, V. The CYGNSS Nanosatellite Constellation Hurricane Mission. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 214–216. [Google Scholar]
- Dickinson, J.; Ruf, C.; Rose, R.; Ridley, A.; Walls, B. CYGNSS: The Cyclone Global Navigation Satellite System’s CubeSat Foundations. In Proceedings of the 12th Annual Joint Agency Commercial Imagery Evaluation (JACIE) Workshop, St. Louis, MO, USA, 16–18 April 2013. [Google Scholar]
- Ruf, C.; Lyons, A.; Ward, A. NASA Intensifies Hurricane Studies with CYGNSS. Earth Obs. NASA 2013, 25, 12–21. [Google Scholar]
- Gleason, S.; Ruf, C.; Clarizia, M.P.; O’Brien, A. Calibration and Unwrapping of the Normalized Scattering Cross Section for the Cyclone Global Navigation Satellite System (CYGNSS). IEEE Trans. Geosci. Remote Sens. 2016, 54, 2495–2509. [Google Scholar] [CrossRef]
- CYGNSS Data Products. Available online: https://clasp-research.engin.umich.edu/missions/cygnss/data-products.php (accessed on 3 March 2021).
- Ruf, C. Mission Update. In Proceedings of the CYGNSS Science Team Meeting, Ann Arbor, MI, USA, 6 June 2020. [Google Scholar]
- Wang, T.; Zavorotny, V.U.; Johnson, J.; Yi, Y.; Ruf, C.; Gleason, S.; McKague, D.; Hwang, P.; Rogers, E.; Chen, S.; et al. Improvement of CYGNSS Level 1 Calibration Using Modeling and Mesurements of Ocean Surface Mean Square Slope. In Proceedings of the 2020 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Waikoloa, HI, USA, 26 September–2 October 2020; pp. 5909–5912. [Google Scholar]
- Cardellach, E.; Nan, Y.; Li, W.; Padulles, R.; Ribo, S.; Rius, A. Variational Retrievals of High Winds Using Uncalibrated CYGNSS Observables. Remote Sens. 2020, 12, 3930. [Google Scholar] [CrossRef]
- Gleason, S.; O’Brien, A.; Russel, A.; Al-Khaldi, M.M.; Johnson, J.T. Geolocation, Calibration and Surface Resolution of CYGNSS GNSS-R Land Observations. Remote Sens. 2020, 12, 1317. [Google Scholar] [CrossRef]
- NOAA CYGNSS Level 2 Science Wind Speed 25-km Product, Version 1.1 ed; PO.DAAC: Pasadena, CA, USA, 2020; Available online: https://doi.org/10.5067/CYGNN-22511 (accessed on 21 March 2021).
- Crespo, J.A.; Posselt, D.J.; Asharaf, S. CYGNSS Surface Heat Flux Product Development. Remote Sens. 2019, 11, 2294. [Google Scholar] [CrossRef]
- CYGNSS Level 2 Ocean Surface Heat Flux Climate Data Record, Version 1.0 ed; PO.DAAC: Pasadena, CA, USA; Available online: https://doi.org/10.5067/CYGNS-C2H10 (accessed on 21 March 2021).
- Ruf, C.S.; Chew, C.; Lang, T.; Morris, M.G.; Nave, K.; Ridley, A.; Balasubramaniam, R. A New Paradigm in Earth Environmental Monitoring with the CYGNSS Small Satellite Constellation. Sci. Rep. 2018, 8, 8782. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Camps, A.; Vall-Llossera, M.; Valencia, E.; Marchan-Hernandez, J.F.; Ramos-Perez, I. Soil Moisture Retrieval Using GNSS-R Techniques: Experimental Results Over a Bare Soil Field. IEEE Trans. Geosci. Remote Sens. 2009, 47, 11. [Google Scholar] [CrossRef]
- Camps, A.; Park, H.; Pablos, M.; Foti, G.; Gommenginger, C.P.; Liu, P.-W.; Judge, J. Sensitivity of GNSS-R Spaceborne Observations to Soil Moisture and Vegetation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4730–4742. [Google Scholar] [CrossRef]
- Chew, C.; Shah, R.; Zuffada, C.; Hajj, G.; Masters, D.; Mannucci, A.J. Demonstrating Soil Moisture Remote Sensing with Observations from the UK TechDemoSat-1 Satellite Mission. Geophys. Res. Lett. 2016, 43, 3317–3324. [Google Scholar] [CrossRef]
- Eroglu, O.; Kurum, M.; Boyd, D.; Gurbuz, A.C. High Spatio-Temporal Resolution CYGNSS Soil Moisture Estimates Using Artificial Neural Networks. Remote Sens. 2019, 11, 2272. [Google Scholar] [CrossRef]
- Nghiem, S.V.; Zuffada, C.; Shah, R.; Chew, C.; Lowe, S.T.; Mannucci, A.J.; Cardellach, E.; Brakenridge, G.R.; Geller, G.; Rosenqvist, A. Wetland Dynamics Monitoring with Global Navigation Satellite System Reflectometry. AGU Earth Space Sci. 2017, 4, 16–39. [Google Scholar] [CrossRef]
- Zuffada, C.; Chew, C.; Nghiem, S.V. GNSS-R Algorithms for Wetlands Observations. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 1126–1129. [Google Scholar]
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J.; et al. The Soil Moisture Active Passive (SMAP) Mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Ruf, C.; Warnock, A.; Brunner, K. Investigating the Impact of Coherent and Incoherent Scattering Terms in GNSS-R Delay Doppler Maps. In Proceedings of the 2020 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Waikoloa, HI, USA, 26 September–2 October 2020; pp. 6202–6205. [Google Scholar]
- Al-Khaldi, M.M.; Johnson, J.T.; Gleason, S.; Loria, E.; O’Brien, A.J.; Yi, Y. An Algorithm for Detecting Coherence in Cyclone Global Navigation Satellite System Mission Level-1 Delay-Doppler Maps. IEEE Trans. Geosci. Remote Sens. 2021, 59, 4454–4463. [Google Scholar] [CrossRef]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Russo, I.M.; di Bisceglie, M.; Galdi, C.; Lavalle, M.; Zuffada, C. Wave Coherence in GNSS Reflectometry: A Signal Processing Point of View. In Proceedings of the 2020 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Waikoloa, Hawaii, USA, 26 September–2 October 2020; pp. 6214–6217. [Google Scholar]
- Santi, E.; Paloscia, S.; Pettinato, S.; Fontanelli, G.; Clarizia, M.P.; Comite, D.; Dente, L.; Guerriero, L.; Pierdicca, N.; Floury, N. Remote Sensing of Forest Biomass Using GNSS Reflectometry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 2351–2368. [Google Scholar] [CrossRef]
- Santi, E.; Pettinato, S.; Paloscia, S.; Clarizia, M.P.; Dente, L.; Guerriero, L.; Comite, D.; Pierdicca, N. Soil Moisture and Forest Biomass retrieval on a global scale by using CyGNSS data and Artificial Neural Networks. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 214–216. [Google Scholar]
- Campbell, J.D.; Melebari, A.; Moghaddam, M. Modeling the Effects of Topography on Delay-Doppler Maps. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1740–1751. [Google Scholar] [CrossRef]
- Senyurek, V.; Lei, F.; Boyd, D.; Gurbuz, A.C.; Kurum, M.; Moorhead, R. Evaluations of Machine Learning-Based CYGNSS Soil Moisture Estimates against SMAP Observations. Remote Sens. 2020, 12, 3503. [Google Scholar] [CrossRef]
- Yueh, S.H.; Shah, R.; Chaubell, M.J.; Hayashi, A.; Xu, X.; Colliander, A. A Semiempirical Modeling of Soil Moisture, Vegetation, and Surface Roughness Impact on CYGNSS Reflectometry Data. IEEE Trans. Geosci. Remote Sens. 2020. [Google Scholar] [CrossRef]
- Lin, L.; Pu, Z. Improving Near-Surface Short-Range Weather Forecasts Using Strongly Coupled Land–Atmosphere Data Assimilation with GSI-EnKF. Mon. Weather Rev. 2020, 148, 2863–2888. [Google Scholar] [CrossRef]
- Lin, L.-F.; Pu, Z. Examining the Impact of SMAP Soil Moisture Retrievals on Short-Range Weather Prediction under Weakly and Strongly Coupled Data Assimilation with WRF-Noah. Mon. Weather Rev. 2019, 147, 4345–4366. [Google Scholar] [CrossRef]
- Chew, C.C.; Small, E.E. Soil Moisture Sensing Using Spaceborne GNSS Reflections: Comparison of CYGNSS Reflectivity to SMAP Soil Moisture. Geophys. Res. Lett. 2018, 45, 4049–4057. [Google Scholar] [CrossRef]
- Park, J.; Johnson, J.T.; O’Brien, A.; Lowe, S.T. An Examination of TDS-1 GNSS-R Returns over Land Surfaces. In Proceedings of the URSI Radio Science Meeting, Pasadena, CA, USA, 6–9 January 2016. [Google Scholar]
- Loria, E.; O’Brien, A.; Gupta, I.J. Detection and Separation of Coherent Reflections in GNSS-R Measurements Using CYGNSS Data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 3995–3998. [Google Scholar]
- Dong, Z.; Jin, S. Evaluation of the Land GNSS-Reflected DDM Coherence on Soil Moisture Estimation from CYGNSS Data. Remote Sens. 2021, 13, 570. [Google Scholar] [CrossRef]
- Balakhder, A.M.; Al-Khaldi, M.M.; Johnson, J.T. On the Coherency of Ocean and Land Surface Specular Scattering for GNSS-R and Signals of Opportunity Systems. IEEE Trans. Geosci. Remote Sens. 2019, 57, 10426–10436. [Google Scholar] [CrossRef]
- Al-Khaldi, M.M.; Johnson, J.T.; Gleason, S.; Chew, C.C.; Gerlein-Safdi, C.; Shah, R.; Zuffada, C. Inland Water Body Mapping Using CYGNSS Coherence Detection. IEEE Trans. Geosci. Remote Sens. 2021. [Google Scholar] [CrossRef]
- Gerlein-Safdi, C.; Ruf, C.S. A CYGNSS-Based Algorithm for the Detection of Inland Waterbodies. Geophys. Res. Lett. 2019, 46, 12065–12072. [Google Scholar] [CrossRef]
- Turner, R.; Panciera, R.; Tanase, M.A.; Lowell, K.; Hacker, J.M.; Walker, J.P. Estimation of Soil Surface Roughness of Agricultural Soils Using Airborne LiDAR. Remote Sens. Environ. 2014, 140, 107–117. [Google Scholar] [CrossRef]
- Kim, H.; Lakshmi, V. Use of Cyclone Global Navigation Satellite System (CYGNSS) Observations for Estimation of Soil Moisture. Geophys. Res. Lett. 2018, 45, 8272–8282. [Google Scholar] [CrossRef]
- Al-Khaldi, M.M.; Johnson, J.T.; O’Brien, A.J.; Balenzano, A.; Mattia, F. Time-Series Retrieval of Soil Moisture Using CYGNSS. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4322–4331. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Pierdicca, N.; Costantini, F.; Floury, N. Analysis of CYGNSS Data for Soil Moisture Retrieval. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2227–2235. [Google Scholar] [CrossRef]
- Gerlein-Safdi, C.; Ruf, C. CYGNSS Constellation Provides New Insight on Tropical Wetlands Dynamics. In Proceedings of the ESA Annual Meeting, ESA-ESTEC, Noordwijk, The Netherlands, 3–6 August 2020. [Google Scholar]
- Ruf, C.; Backhus, R.; Butler, T.; Chen, C.C.; Gleason, S.; Loria, E.; McKague, D.; Miller, R.; O’Brien, A.; van Nieuwstadt, L. Next Generation GNSS-R Instrument. In Proceedings of the 2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 3353–3356. [Google Scholar]
- Morris, M.; Ruf, C.S. Determining Tropical Cyclone Surface Wind Speed Structure and Intensity with the CYGNSS Satellite Constellation. J. Appl. Meteorol. Clim. 2017, 56, 1847–1865. [Google Scholar] [CrossRef]
- Morris, M.; Ruf, C.S. Estimating Tropical Cyclone Integrated Kinetic Energy with the CYGNSS Satellite Constellation. J. Appl. Meteorol. Clim. 2017, 56, 235–245. [Google Scholar] [CrossRef]
- Zhang, S.; Pu, Z.; Posselt, D.J.; Atlas, R. Impact of CYGNSS Ocean Surface Wind Speeds on Numerical Simulations of a Hurricane in Observing System Simulation Experiments. J. Atmos. Ocean. Technol. 2017, 34, 375–383. [Google Scholar] [CrossRef]
- Annane, B.; McNoldy, B.; Leidner, S.M.; Hoffman, R.; Atlas, R.; Majumdar, S.J. A Study of the HWRF Analysis and Forecast Impact of Realistically Simulated CYGNSS Observations Assimilated as Scalar Wind Speeds and as VAM Wind Vectors. Mon. Weather Rev. 2018, 146, 2221–2236. [Google Scholar] [CrossRef]
- Leidner, S.M.; Annane, B.; McNoldy, B.; Hoffman, R.; Atlas, R. Variational Analysis of Simulated Ocean Surface Winds from the Cyclone Global Navigation Satellite System (CYGNSS) and Evaluation Using a Regional OSSE. J. Atmos. Ocean. Technol. 2018, 35, 1571–1584. [Google Scholar] [CrossRef]
- Cui, Z.; Pu, Z.; Tallapragada, V.; Atlas, R.; Ruf, C.S. A Preliminary Impact Study of CYGNSS Ocean Surface Wind Speeds on Numerical Simulations of Hurricanes Harvey and Irma (2017). Geophys. Res. Lett. 2019, 46, 2984–2992. [Google Scholar] [CrossRef]
- Park, J.; Johnson, J.T.; Yi, Y.; O’Brien, A.J. Using “Rapid Revisit” CYGNSS Wind Speed Measurements to Detect Convective Activity. J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 98–106. [Google Scholar] [CrossRef]
- Mayers, D.; Ruf, C. Tropical Cyclone Center Fix Using CYGNSS Winds. J. Appl. Meteorol. Clim. 2019, 58, 1993–2003. [Google Scholar] [CrossRef]
- Huang, F.; Garrison, J.L.; Leidner, S.M.; Annane, B.; Hoffman, R.N.; Grieco, G.; Stoffelen, A. A Forward Model for Data Assimilation of GNSS Ocean Reflectometry Delay-Doppler Maps. IEEE Trans. Geosci. Remote Sens. 2020, 59, 2643–2656. [Google Scholar] [CrossRef]
- CYGNSS Level 3 Storm Centric Grid Science Data Record, Version 1.0 ed; PO.DAAC: Pasadena, CA, USA; Available online: https://doi.org/10.5067/CYGNS-L3S10 (accessed on 21 March 2021).
- Lang, T. Comparing Winds Near Tropical Oceanic Precipitation Systems with and without Lightning. Remote Sens. 2020, 12, 3968. [Google Scholar] [CrossRef]
- Bui, H.X.; Maloney, E.D.; Dellaripa, E.M.R.; Singh, B. Wind Speed, Surface Flux, and Intraseasonal Convection Coupling from CYGNSS Data. Geophys. Res. Lett. 2020, 47, e2020GL090376. [Google Scholar] [CrossRef]
- Crespo, J.A.; Naud, C.M.; Posselt, D.J. CYGNSS Observations and Analysis of Low-Latitude Extratropical Cyclones. J. Appl. Meteorol. Clim. 2021, 60, 527–541. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Member | Chris Ruf |
|---|---|
| Home Institution | University of Michigan |
| CYGNSS Role | Principal Investigator |
| Areas | Earth environment remote sensing methods, instrumentation, atmosphere |
| Member | Mahta Moghaddam |
| Home Institution | University of Southern California |
| CYGNSS Role | Terrestrial Science Lead, Co-I |
| Areas | Inverse scattering, subsurface characterization, water resources |
| Member | Derek Posselt |
| Home Institution | Jet Propulsion Laboratory, California Institute of Technology |
| CYGNSS Role | Atmospheric Science Lead, Co-I |
| Areas | Clouds and precipitation, data assimilation, uncertainty quantification |
| Member | Ruzbeh Akbar |
| Home Institution | Massachusetts Institute of Technology |
| CYGNSS Role | Soil moisture sensor networks, calibration, and validation |
| Areas | Microwave remote sensing of Earth, hydrology, wireless sensor networks |
| Member | Alexandra Bringer |
| Home Institution | The Ohio State University |
| CYGNSS Role | CYGNSS Science Team member |
| Areas | Microwave remote sensing of the Earth, ocean and land applications |
| Member | Juan A. Crespo |
| Home Institution | Jet Propulsion Laboratory, California Institute of Technology |
| CYGNSS Role | Competed Science Team Member, CYGNSS ocean surface heat flux product |
| Areas | Extratropical cyclones & air-sea fluxes |
| Member | Mary Morris |
| Home Institution | Jet Propulsion Laboratory, California Institute of Technology |
| CYGNSS Role | CYGNSS Science Team member |
| Areas | Metereological and hydrological applications, Earth sciences |
| Member | April Warnock |
| Home Institution | SRI International |
| CYGNSS Role | CYGNSS Science Team member |
| Areas | Hydrology/storm surge modeling |
| Member | Hugo Carreno-Luengo |
| Home Institution | University of Michigan |
| CYGNSS Role | CYGNSS Science Team member |
| Areas | Surface scattering, Earth sciences |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carreno-Luengo, H.; Crespo, J.A.; Akbar, R.; Bringer, A.; Warnock, A.; Morris, M.; Ruf, C. The CYGNSS Mission: On-Going Science Team Investigations. Remote Sens. 2021, 13, 1814. https://doi.org/10.3390/rs13091814
Carreno-Luengo H, Crespo JA, Akbar R, Bringer A, Warnock A, Morris M, Ruf C. The CYGNSS Mission: On-Going Science Team Investigations. Remote Sensing. 2021; 13(9):1814. https://doi.org/10.3390/rs13091814
Chicago/Turabian StyleCarreno-Luengo, Hugo, Juan A. Crespo, Ruzbeh Akbar, Alexandra Bringer, April Warnock, Mary Morris, and Chris Ruf. 2021. "The CYGNSS Mission: On-Going Science Team Investigations" Remote Sensing 13, no. 9: 1814. https://doi.org/10.3390/rs13091814
APA StyleCarreno-Luengo, H., Crespo, J. A., Akbar, R., Bringer, A., Warnock, A., Morris, M., & Ruf, C. (2021). The CYGNSS Mission: On-Going Science Team Investigations. Remote Sensing, 13(9), 1814. https://doi.org/10.3390/rs13091814