
Structural Stability Evaluation of Existing Buildings by Reverse Engineering with 3D Laser Scanner



Abstract
:1. Introduction
- History of Scanner
- Remote Method
- Scan-to-BIM
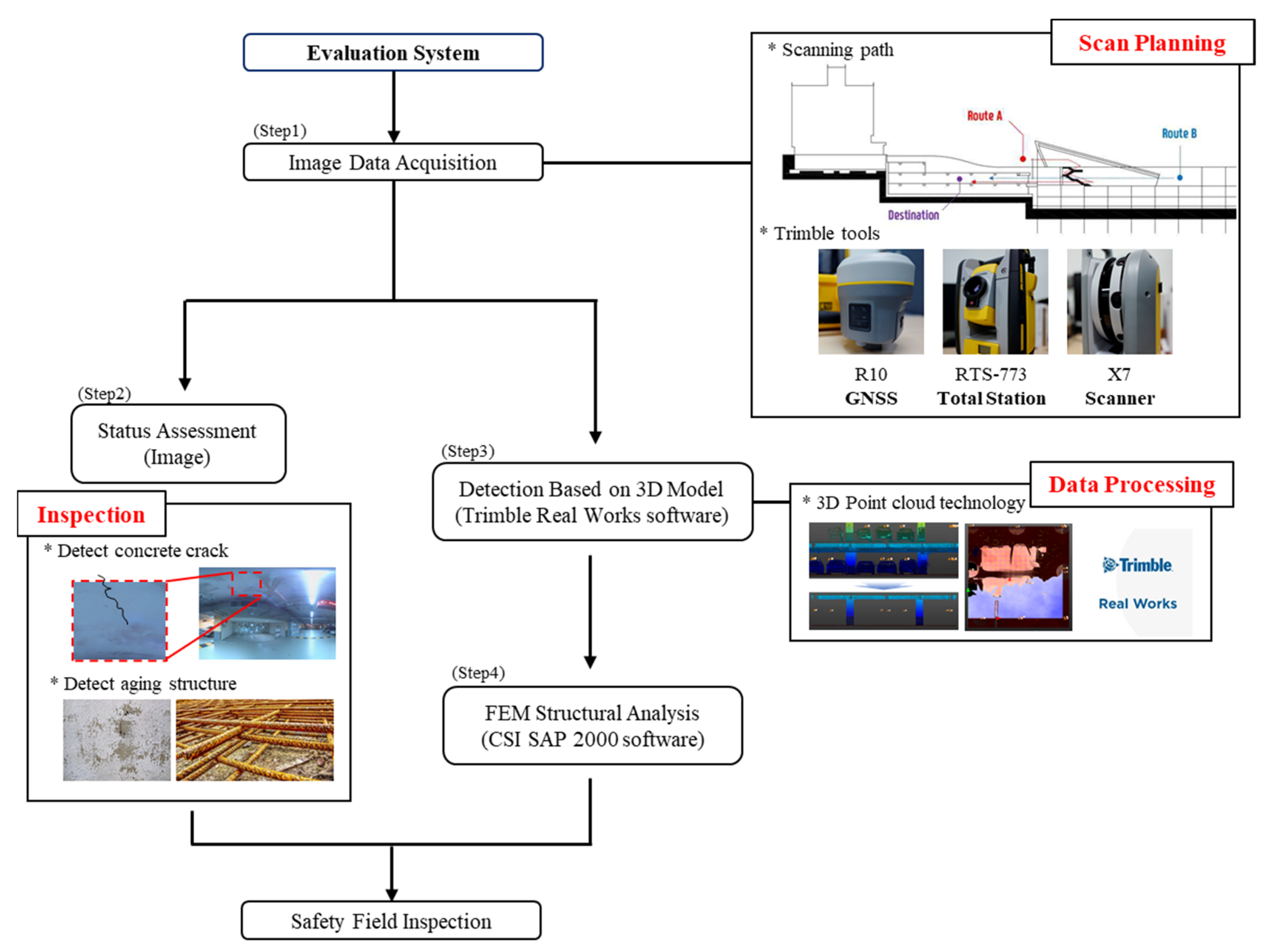
2. Structural Evaluation System of Using 3D Laser Scanner
2.1. Image Data Acquisition
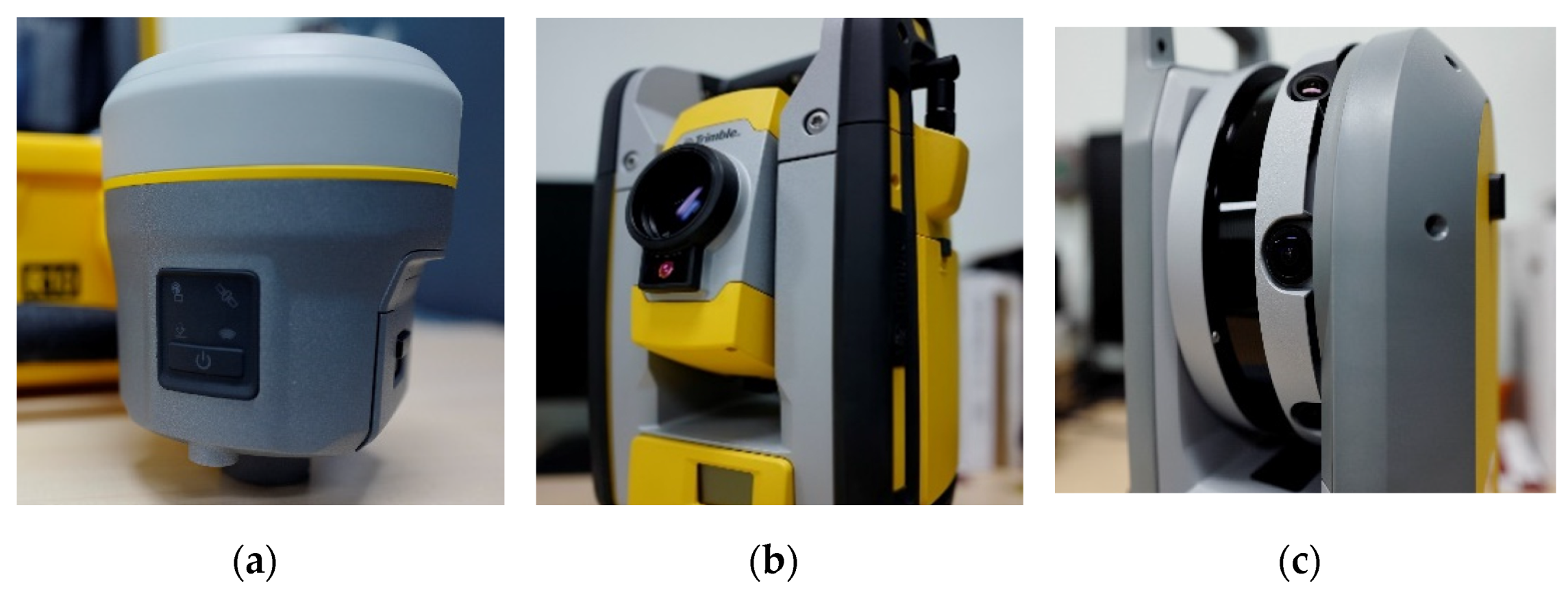
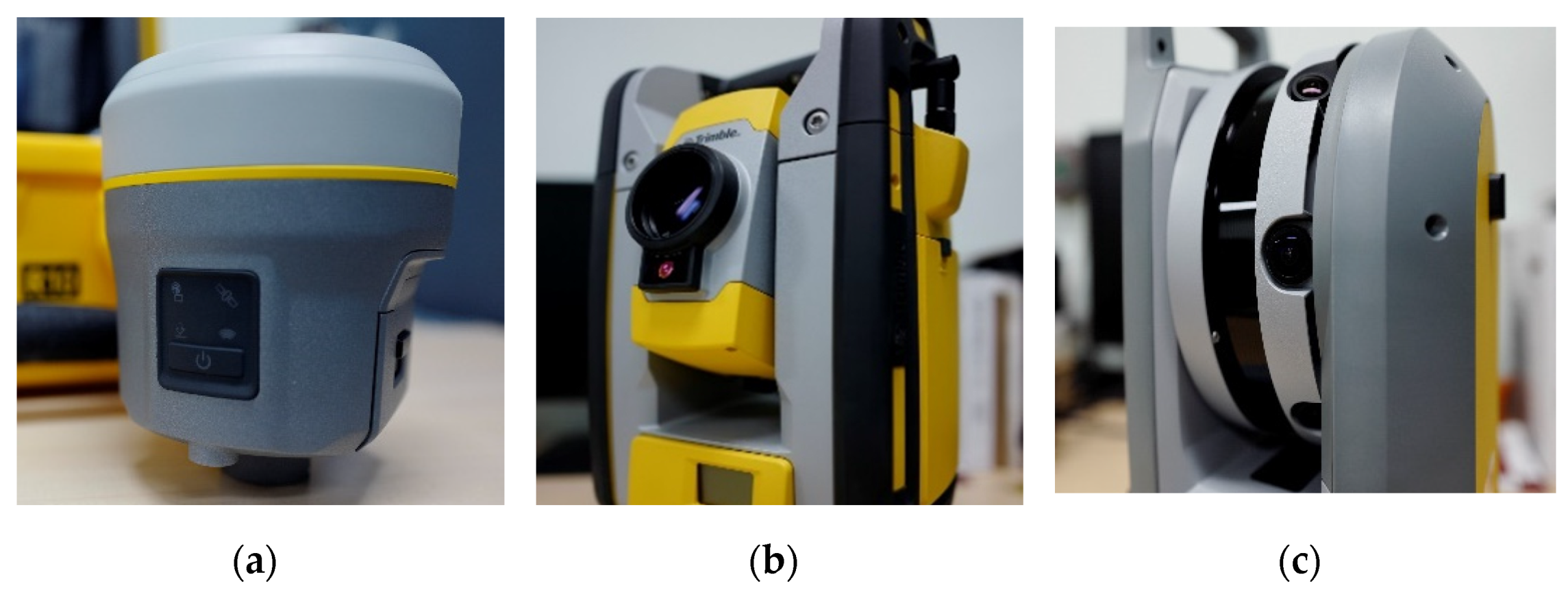
2.1.1. Measurement
2.1.2. Defect Detection
2.2. Deflection and Deformation Detection
2.2.1. Post-Processing
2.2.2. Detection Based on Scan Data
2.3. FEM Structural Analysis
3. Application
3.1. Case 1: Underground Parking Space of Campus Building A (Seoul)
3.1.1. Status Assessment
3.1.2. Detection of Deflection and Deformation
- Deflection of Slab
- 2.
- Deformation of Columns
3.1.3. FEM Structural Analysis
3.2. Case 2: Underground Parking Space of Campus Building B (Seoul)
3.2.1. Detection of Deflection
3.2.2. Detection of Deformation
3.2.3. FEM Structural Analysis
4. Conclusions
- (1)
- The evaluation system with a 3D laser scanner consists of safety inspection through images and a 3D model. Building information can be obtained using this evaluation system. The scanning data comprised image data and 3D point cloud data, and a status assessment was performed using the image data. Three-dimensional modeling was performed using PCD to evaluate the deflection and deformation of the structure.
- (2)
- The evaluation system can acquire structural information using 3D point cloud data. Reverse engineering technology can be used to detect deflections and deformations. Inspecting aging buildings without drawings can be performed faster and more accurately than conventional methods using reverse engineering.
- (3)
- Two pilot applications determined the applicability of the method in campus buildings using structural stability evaluation by reverse engineering. This system could evaluate the deflection of the slab and deformation of the column. The evaluation grade is determined according to the design code. By checking the slab through drawings and reverse engineering, ‘Case 1’ showed an error of 10%, and ‘Case 2’ showed an error of 4%. Additionally, structural analysis was performed by reflecting the acquired building information. The structural state can be verified by comparing the structural analysis results with the actual data.
- (4)
- A 3D laser scanner measures the distance when the laser hits an object and returns. Therefore, there is the possibility of noise caused by the scanning angle. Consequently, it is necessary to shoot from various angles, scan from multiple angles, and proceed with matching based on the overlapping points. Through this process, a 3D model is constructed in a point cloud. In this study, a 3D PCD model was created using ‘Real Works’ commercial software. In conclusion, it was confirmed that the scanning steps can have a significant effect on point cloud data.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kim, J. The Structure of the Collapsed Building in Yongsan Was Reconstructed to Determine the Cause...Laser Scanner Input; Yonhap News: Seoul, Korea, 2018. [Google Scholar]
- Ryu, J.; Kim, Y.Y.; Park, M.W.; Ju, Y.K. Experimental and numerical investigations of steel-polymer hybrid floor panels subjected to three-point bending. Eng. Struct. 2018, 168, 290–299. [Google Scholar] [CrossRef]
- Lee, C. It also Catches the Error in mm. 3D Scanner and Drone. Evolving Construction Site; News1: Seoul, Korea, 2020. [Google Scholar]
- Grace, E. Laser Scanning in Construction: Everything You Need to Know; Autodesk Construction Cloud: San Rafael, CA, USA, 2020. [Google Scholar]
- Jose, M. History of 3D Laser Scanning; SurveyTech Solutions, Inc.: Tampa, FL, USA, 2017. [Google Scholar]
- Yoon, K.S. The Fourth Industrial Revolution, Opportunities for New Leap Forward in the Building Industry; Korea Institute of Registered Architects, Archinews: Seoul, Korea, 2020. [Google Scholar]
- Hong, S.H. The 4th Basic Plan for Safety and Maintenance of Facilities. Korea Institute of Construction Engineering and Management. Constr. Manag. 2018, 19, 24–31. [Google Scholar]
- 2019 3D Trends study: 3D Imaging Market Growing, Including Geospatial. BIM and construction applications increase use of 3D, POB. Environ. Eng. Manag. J. 2019, 18. Available online: https://wwwapex-mapping.com/post/2019-3d-mapping-trends-study-3d-imaging-market-growing-including-geospatial-tech (accessed on 22 March 2022).
- Cheok, G.S.; Lipman, R.R.; Witzgall, C.; Bernal, J.; Stone, W.C. Field demonstration of laser scanning. In Proceedings of Automation and Robotics in Construction XVII, Taipei, Taiwan, March 2000; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2000; pp. 1201–1206. [Google Scholar]
- Cheok, G.S. Ladars for construction assessment and update. Autom. Constr. 2000, 9, 463–477. [Google Scholar] [CrossRef]
- Cheok, G.S.; Stone, W.C.; Bernal, J. Laser scanning for construction metrology, National Institute of Standards and Technology. In Proceedings of the American Nuclear Society 9th International Topical Meeting on Robotics and Remote Systems, Seattle, WA, USA, 4–8 March 2001. [Google Scholar]
- Hajian, H.; Burcin, B.-G. Scan to BIM: Factors Affecting Operational and Computational Errors and Productivity Loss. In Proceedings of the 27th International Symposium on Automation and Robotics in Construction, Bratislava, Slovakia, 25 June 2010. [Google Scholar]
- Stanton, J.F.; Eberhard, M.O.; Barr, P.J. A weight-stretched-wire system for monitoring deflections. Eng. Struct. 2003, 25, 347–357. [Google Scholar] [CrossRef]
- In, C.W.; Schempp, F.; Kim, J.Y.; Jacobs, L.J. A fully non-contact, air-coupled ultrasonic measurement of surface breaking cracks in concrete. J. Nondestruct. Eval. 2015, 34, 272. [Google Scholar] [CrossRef]
- Jahanshahi, M.R.; Masri, S.F. A new methodology for non-contact accurate crack width measurement through photogrammetry for automated structural safety evaluation. Smart Mater. Struct. 2013, 22, 035019. [Google Scholar] [CrossRef]
- Morris, I.; Abdel-Jaber, H.; Glisic, B. Quantitative Attribute Analyses with Ground Penetrating Radar for Infrastructure Assessments and Structural Health Monitoring. Sensors 2019, 19, 1637. [Google Scholar] [CrossRef] [Green Version]
- Lovse, J.W.; Teskey, W.F.; Lachapelle, G.; Cannon, M.E. 7-Dynamic Deformation Monitoring of Tall Structure Using GPS Technology. J. Surv. Eng. 1995, 121, 35–40. [Google Scholar] [CrossRef]
- Roberts, G.W.; Meng, X.; Dodson, A.H. Integrating a global positioning system and accelerometers to monitor the deflection of bridges. J. Surv. Eng. 2004, 130, 65–72. [Google Scholar] [CrossRef]
- Yu, J.; Meng, X.; Shao, X.; Yan, B.; Yang, L. Identification of dynamic displacements and modal frequencies of a medium-span suspension bridge using multimode GNSS processing. Eng. Struct. 2014, 81, 432–443. [Google Scholar] [CrossRef]
- Shan, B.; Zheng, S.; Ou, J. A stereovision-based crack width detection approach for concrete surface assessment. KSCE J. Civ. Eng. 2016, 20, 803–812. [Google Scholar] [CrossRef]
- McGRAW Hill Construction. The Business Value of BIM for Construction in Major Global Markets: How Contractors around the World Are Driving Innovations with Building Information Modelling; Smart Market Report; McGraw-Hill Education LLC: New York, NY, USA, 2014. [Google Scholar]
- Clarke, T.A.; Robson, S. Building a digital close range three dimensional measuring system for less than £5000. Photogramm. Rec. 1993, 14, 675–680. [Google Scholar] [CrossRef]
- Fraser, C.S. Photogrammetric measurement to one part in a million. Photogramm. Remote Sens. 1992, 58, 305–310. [Google Scholar]
- Ham, N.H.; Lee, S.H. Empirical Study on Structural Safety Diagnosis of Large-Scale Civil Infrastructure Using Laser Scanning and BIM. Sustainability 2018, 10, 4024. [Google Scholar] [CrossRef] [Green Version]
- Mader, D.; Blaskow, R.; Westfeld, P.; Weller, C. Potential of UAV-based Laser Scanner and Multispectral Camera Data in Building Inspection. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 1135–1142. [Google Scholar] [CrossRef] [Green Version]
- Puente, I.; Lindenbergh, R.; Van, N.; Esposito, R.; Schipper, R. Monitoring of Progressive Damage in Buildings Using Laser Scan Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 4–7. [Google Scholar] [CrossRef] [Green Version]
- Riccardo, F.; Giovanni, G.; Luca, L.; Deodato, T.; Paolo, C. Terrestrial Laser Scanning for Rockfall Stability Analysis in the Cultural Heritage Site of Pitigliano; Department of Earth Sciences, University of Firenze: Firenze, Italy, 2012. [Google Scholar]
- Gordon, S.J.; Lichti, D.D. Modeling Terrestrial Laser Scanner Data for Precise Structural Deformation Measurement. J. Surv. Eng. 2007, 133, 72–80. [Google Scholar] [CrossRef]
- Artese, S.; Zinno, R. TLS for dynamic measurement of the elastic line of bridges. Appl. Sci. 2020, 10, 1182. [Google Scholar] [CrossRef] [Green Version]
- Kim, T.H.; Woo, W.; Chung, K. Steel Construction Management through 3D Scanning Technology and Building Information Modelling (BIM). In Proceedings of the AIK Symposium-Spring 2020, Seoul, Korea, 24 April 2020. (In Korean). [Google Scholar]
- Kim, T.H.; Woo, W.; Chung, K. Potential Effectiveness of 3D Scanning Algorithms for Real-BIM. J. Archit. Inst. Korea 2018, 38, 378–381. (In Korean) [Google Scholar]
- Kim, T.H.; Woo, W.; Chung, K. 3D Scanning Data Coordination and As-Built-BIM Construction Process Optimization. Archit. Res. 2019, 21, 111–116. [Google Scholar]
- Lee, B.D.; Kim, T.H. Utilization of 3D scanners and BIM data for the Fourth Industrial Revolution. Korean Assoc. Spat. Struct. 2018, 18, 19–26. [Google Scholar]
- MOLIT. Korean Design Standard (in Korean); Ministry of Land, Infrastructure and Transport: Sejong City, Korea, 2019. [Google Scholar]
- Safety Inspection and Precision Safety Diagnosis. In Detailed Guidelines for Safety Inspection and Precision Safety Diagnosis; Korea Authority of Land & Infrastructure Safety: Jinju, Korea, 2017; Chapter 3.
- Bae, J.; Lee, J.; Jang, A.; Ju, Y.K.; Park, M.J. SMART SKY EYE System for Preliminary Structural Safety Assessment of Buildings Using Unmanned Aerial Vehicles. Sensors 2022, 22, 2762. [Google Scholar] [CrossRef] [PubMed]
- Jeong, D.M.; Lee, J.H.; Ju, Y.K. Photogrammetric crack detection method in building using unmanned aerial vehicle. J. Archi. Inst. Korea. Struct. Constr. 2019, 35, 11–19. (In Korean) [Google Scholar]
- Lee, J.; Bae, J.; Ju, Y.K. Preliminary safety evaluation technology of buildings using Unmanned Aerial Vehicle (UAV). In Proceedings of the 2019 IABSE Congress, New York, NY, USA, 4–6 September 2019. [Google Scholar]
- Jeong, D.M.; Lee, J.H.; Ju, Y.K. Rapid structural safety evaluation method of buildings using unmanned aerial vehicle (SMART SKY EYE). J. Archi. Inst. Korea Struct. Constr. 2019, 35, 3–11. (In Korean) [Google Scholar]
- Ju, Y.K.; Kim, Y.C.; Ryu, J. Finite element analysis of concrete filled tube column to flat plate slab joint. J. Constr. Steel. Res. 2013, 90, 297–307. [Google Scholar] [CrossRef]
- Kim, Y.J.; Lee, B.S.; Choi, D.S.; Oh, H.K.; Kang, C.B. Impact analysis of structures on vehicle loads in underground parking lots. J. Korean Soc. Adv. Compos. Struct. 2013, 4, 22–29. [Google Scholar]
- Ryu, J.; Lee, C.H.; Yoon, S.W.; Ju, Y.K. Shear resistance of a biaxial hollow composite floor system with GFRP plates. J. Surv. Eng. 2017, 143, 4016180. [Google Scholar] [CrossRef]
- Park, M.J.; Jeong, K.M.; Ju, Y.K. Thermal contact conductance-based thermal behavior analytical model for a hybrid floor at elevated temperatures. Materials 2020, 13, 4257. [Google Scholar] [CrossRef]
- Park, M.J.; Bae, J.; Ryu, J.; Ju, Y.K. Fire design equation for steel-polymer composite floors in thermal fields via finite element analysis. Materials 2020, 13, 5573. [Google Scholar] [CrossRef]
- Park, M.J.; Yoon, S.W.; Ju, Y.K. New approaches for floor vibrations of steel–polymer–steel sandwich floor systems. Eng. Struct. 2022, 258, 114141. [Google Scholar] [CrossRef]
- Alemayehu, R.W.; Bae, J.; Ju, Y.K.; Park, M.J. Bond Behavior of Concrete-Filled Steel Tube Mega Columns with Different Connectors. Materials 2022, 15, 2791. [Google Scholar] [CrossRef] [PubMed]
- Park, M.J.; Alemayehu, R.W.; Ju, Y.K. Fire Resistance Performance of Steel-Polymer Prefabricated Composite Floors Using Standard Fire Tests. Polymers 2022, 14, 1488. [Google Scholar] [CrossRef] [PubMed]
- Park, M.J.; Ju, Y.K. Finite element model for the steel-polymer composite floor filled with phase-change amorphous polymers at elevated temperatures. Constr. Build. Mater. 2022, 319, 126059. [Google Scholar] [CrossRef]
- Park, M.J.; Bae, J.; Ju, Y.K. Structural Behavior of a Composite Curtain Wall Fabricated by the Fused Deposition Modeling 3D Printing Method. Polymers 2022, 14, 1431. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trimble R10 (GNSS) | |
| Accuracy | 3 mm |
| GPS Channel | 672 |
| Weight | 1.12 kg |
| Trimble RTS-773 (Total Station) | |
| Accuracy | 2 mm @ 50 m |
| Range | 500~700 m |
| Resolution | 2048 × 1536 |
| Trimble X7 (3D Laser Scanner) | |
| Scanning Speed | 500,000 points/s |
| Range | 0.6~80 m |
| Range Accuracy | 2 mm |
| Imaging Sensors | 3 coaxial, 10MP camera |
| Automatic Level accuracy | 0.3 mm @ 20 m |
| Weight | 5.8 kg |
| Size | 178 × 353 × 170 (mm) |
| Export Formats | RCP, E57, LAS, PTX, RWP, TDX, TZF |
| Section | Deflection Value 1 |
|---|---|
| Section 1 | 24.61 mm |
| Section 2 | 30.91 mm |
| Section 3 | 22.12 mm |
| Maximum value | 30.91 mm |
| Grade | Standard of Deflection Value | Estimate Value (Result) |
|---|---|---|
| A | 1 | |
| B | (Negligible damage) | 3 |
| C | 5 | |
| D | 7 | |
| E | 9 |
| Grade | Standard of Deformation Value | Estimate Value (Result) |
|---|---|---|
| A | 1 | |
| B | 3 | |
| C | 5 | |
| D | 7 | |
| E | 9 |
| Type | Value |
|---|---|
| Equipment load | |
| Concentrated load (Vehicle) | |
| Uniform load | |
| Uniform load (Slope way) |
| Section | Deflection Value 1 |
|---|---|
| Section 1 | 65.38 mm |
| Section 2 | 48.5 mm |
| Maximum value | 65.38 mm |
| Type | Value |
|---|---|
| Equipment load | |
| Concentrated load (Vehicle) | |
| Uniform load |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jang, A.; Ju, Y.K.; Park, M.J. Structural Stability Evaluation of Existing Buildings by Reverse Engineering with 3D Laser Scanner. Remote Sens. 2022, 14, 2325. https://doi.org/10.3390/rs14102325
Jang A, Ju YK, Park MJ. Structural Stability Evaluation of Existing Buildings by Reverse Engineering with 3D Laser Scanner. Remote Sensing. 2022; 14(10):2325. https://doi.org/10.3390/rs14102325
Chicago/Turabian StyleJang, Arum, Young K. Ju, and Min Jae Park. 2022. "Structural Stability Evaluation of Existing Buildings by Reverse Engineering with 3D Laser Scanner" Remote Sensing 14, no. 10: 2325. https://doi.org/10.3390/rs14102325
APA StyleJang, A., Ju, Y. K., & Park, M. J. (2022). Structural Stability Evaluation of Existing Buildings by Reverse Engineering with 3D Laser Scanner. Remote Sensing, 14(10), 2325. https://doi.org/10.3390/rs14102325