
Exploring the Potential of UAV LiDAR Data for Trunk Point Extraction and Direct DBH Measurement


 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Materials
2.1. Study Area
2.2. Real UAV LiDAR Data
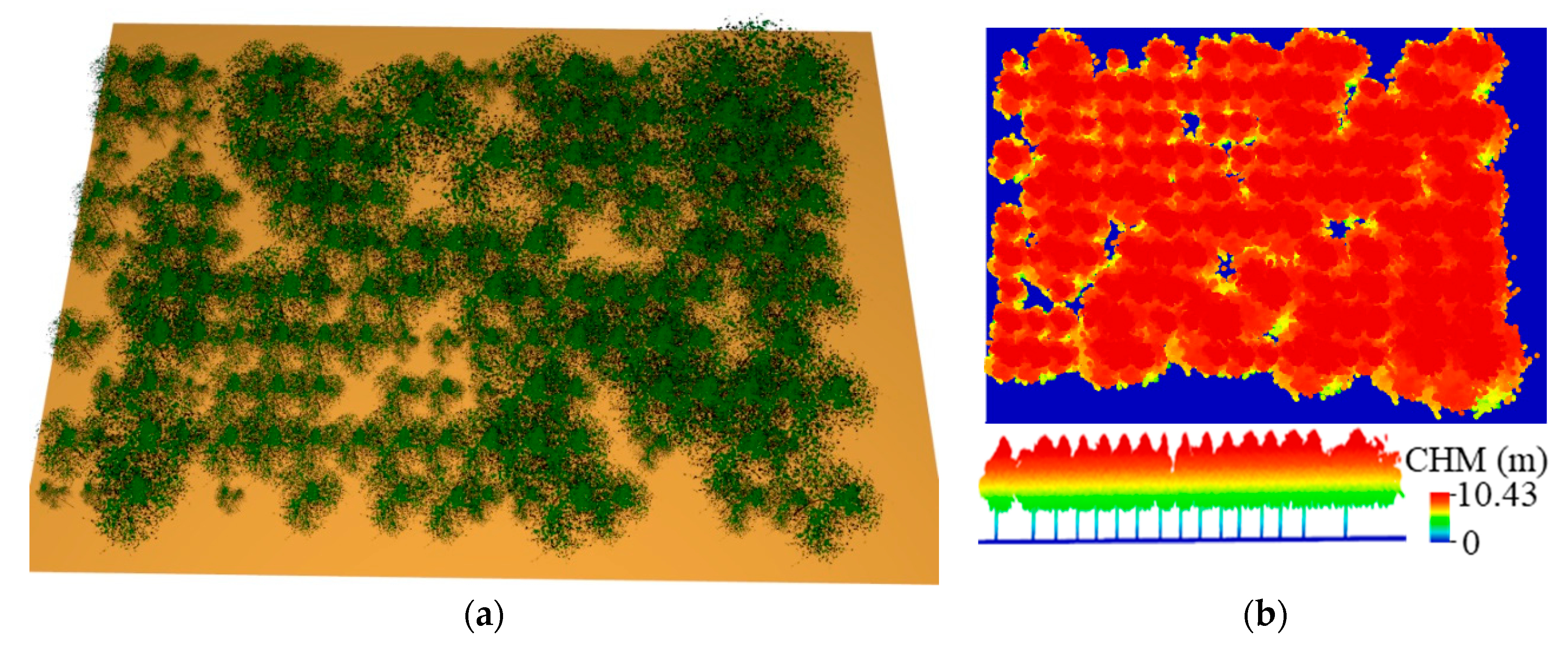
2.3. Simulated UAV LiDAR Data
2.4. Field-Measured Data
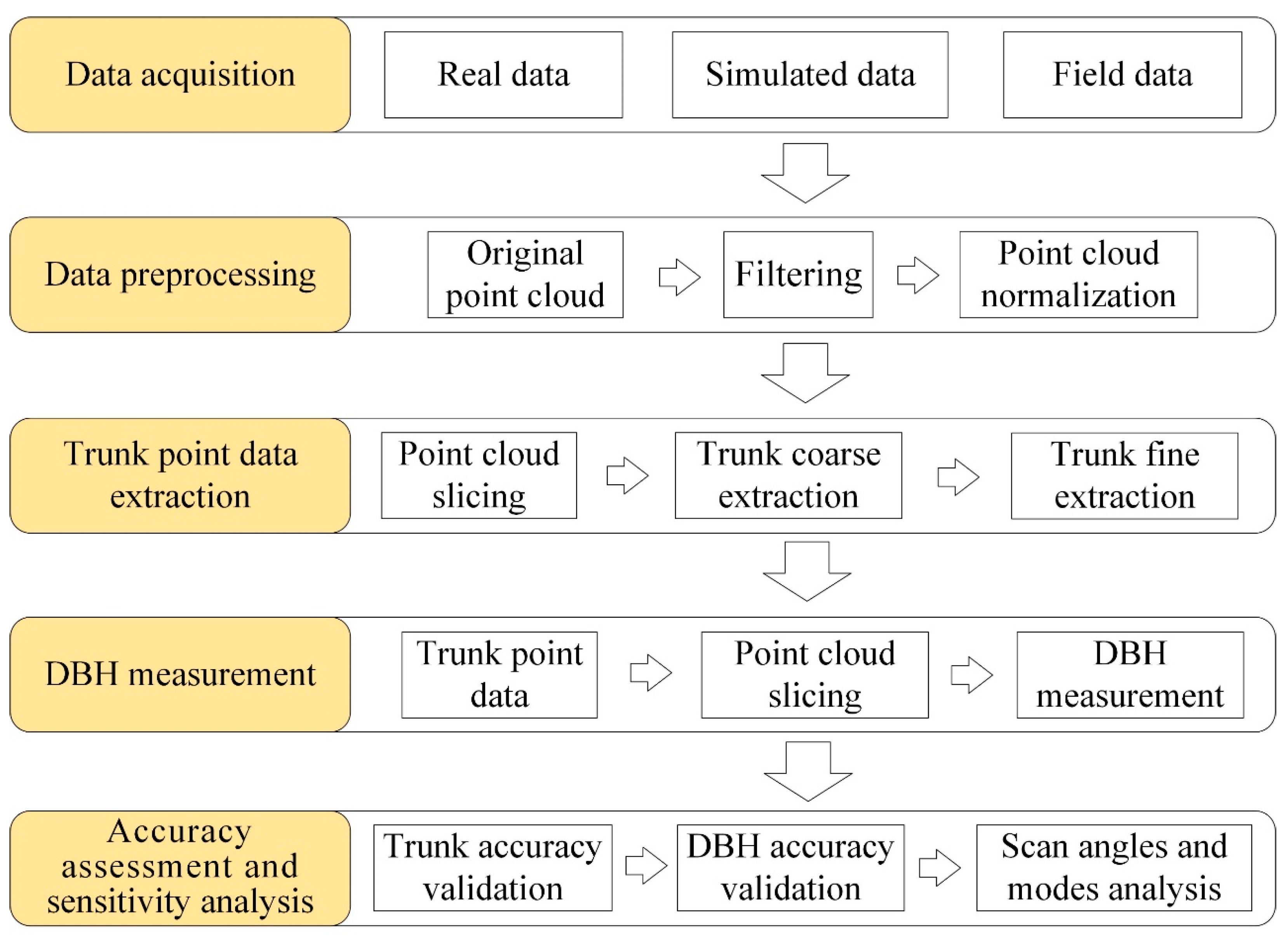
3. Methods
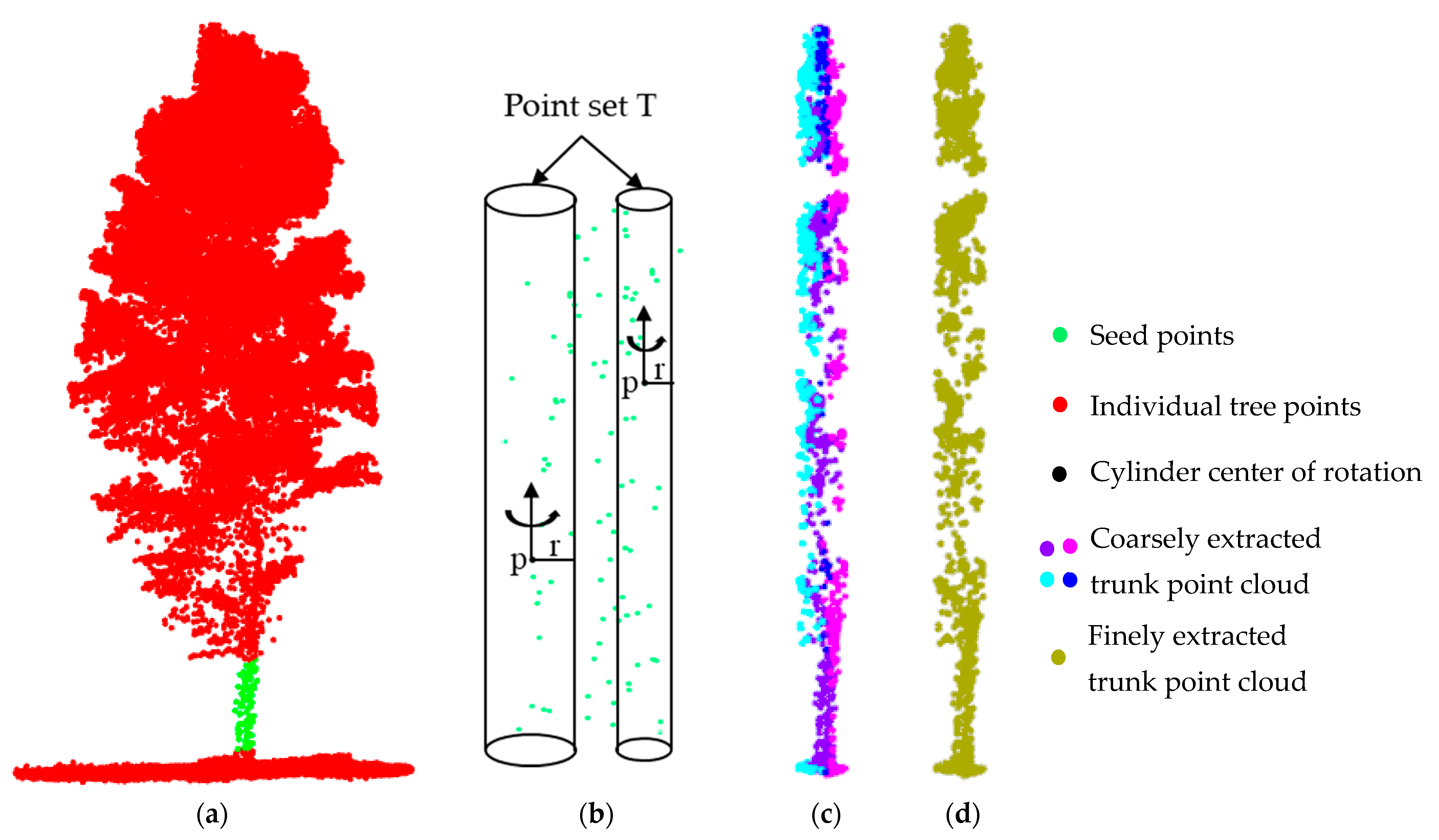
3.1. Trunk Point Extraction
3.2. Direct Measurement of DBH
3.3. Influence of Scanning Angles and Modes on Trunk Point Extraction and DBH Measurement
4. Results and Discussion
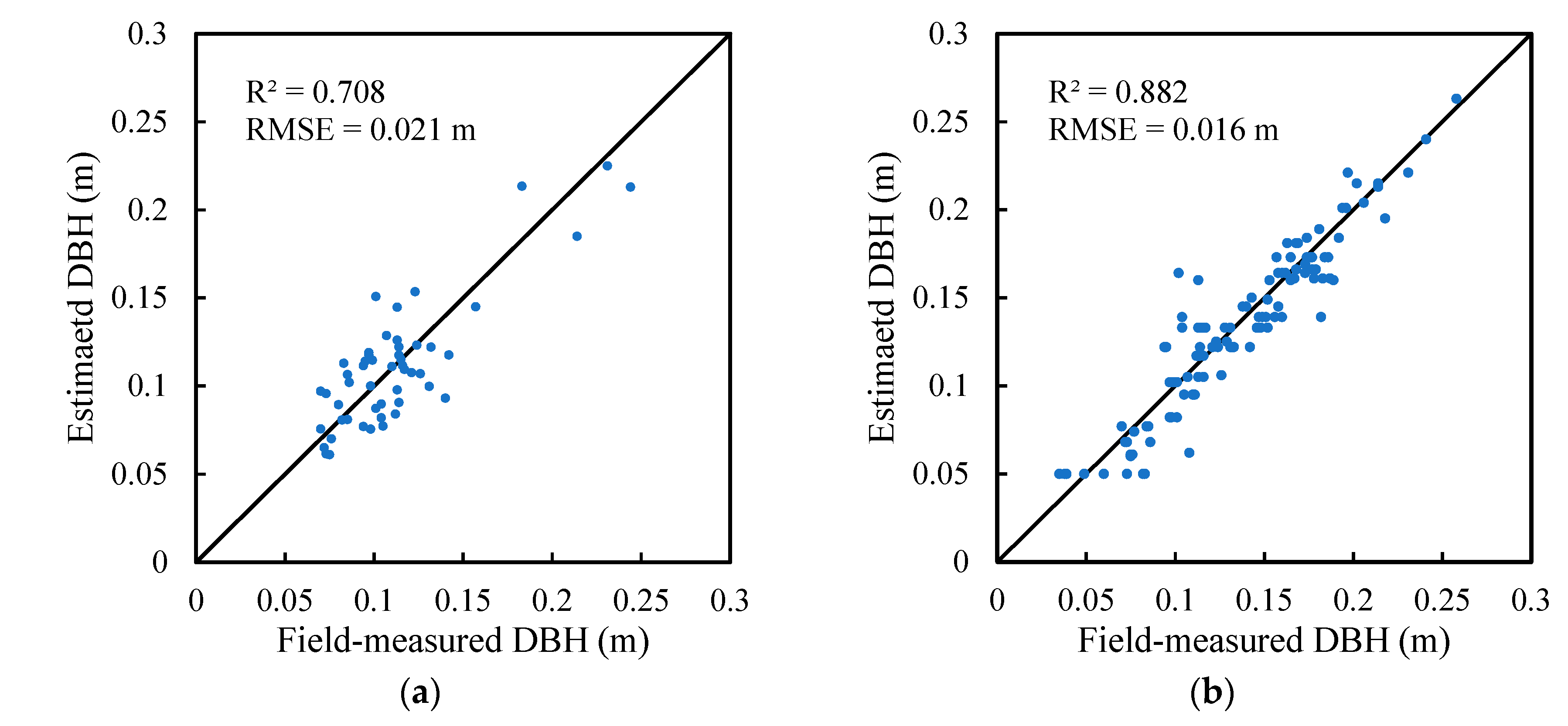
4.1. Trunk Point Extraction and DBH Measurement
4.2. The Effects of Scanning Angles and Modes on Trunk Point Extraction and DBH Measurement
4.2.1. Scanning Angle
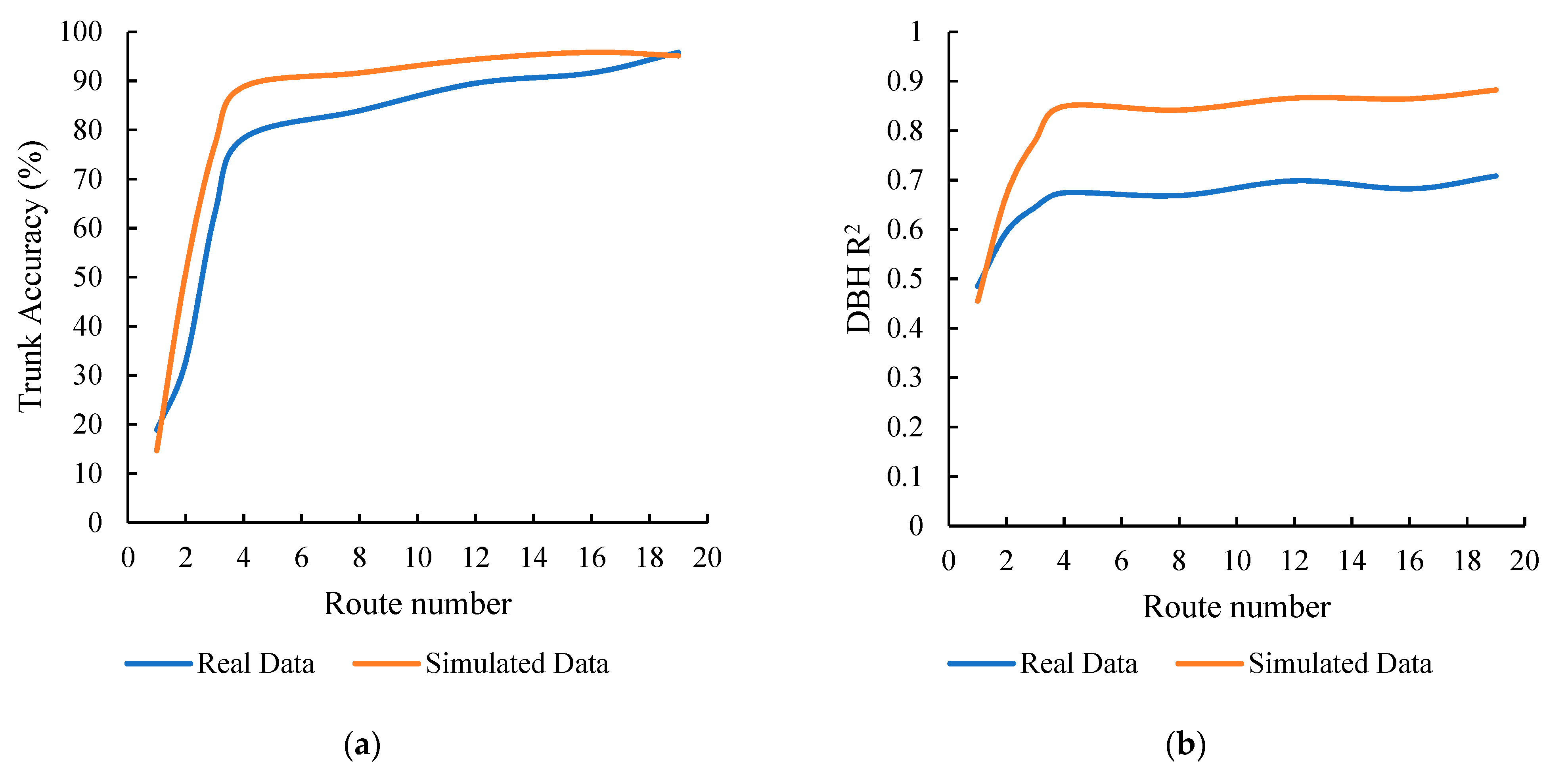
4.2.2. Scanning Mode
4.3. Comparison with the Existing Methods
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mikhaylov, A.; Moiseev, N.; Aleshin, K.; Burkhardt, T. Global climate change and greenhouse effect. Entrep. Sustain. Issues 2020, 7, 2897. [Google Scholar] [CrossRef]
- Xu, R.; Yu, P.; Abramson, M.J.; Johnston, F.H.; Samet, J.M.; Bell, M.L.; Haines, A.; Ebi, K.L.; Li, S.; Guo, Y. Wildfires, global climate change, and human health. N. Engl. J. Med. 2020, 383, 2173–2181. [Google Scholar] [CrossRef] [PubMed]
- Seidl, R.; Thom, D.; Kautz, M.; Martin-Benito, D.; Peltoniemi, M.; Vacchiano, G.; Wild, J.; Ascoli, D.; Petr, M.; Honkaniemi, J. Forest disturbances under climate change. Nat. Clim. Chang. 2017, 7, 395–402. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Solntsev, A.M. Climate change: International legal dimension. Mosc. J. Int. Law 2018, 106, 60–78. [Google Scholar] [CrossRef]
- Urpelainen, J. Geoengineering and global warming: A strategic perspective. Int. Environ. Agreem. Polit. Law Econ. 2012, 12, 375–389. [Google Scholar] [CrossRef]
- Goldbergs, G.; Levick, S.R.; Lawes, M.; Edwards, A. Hierarchical integration of individual tree and area-based approaches for savanna biomass uncertainty estimation from airborne LiDAR. Remote Sens. Environ. 2018, 205, 141–150. [Google Scholar] [CrossRef]
- Neuville, R.; Bates, J.S.; Jonard, F. Estimating Forest Structure from UAV-Mounted LiDAR Point Cloud Using Machine Learning. Remote Sens. 2021, 13, 352. [Google Scholar] [CrossRef]
- Riaño, D.; Chuvieco, E.; Condés, S.; González-Matesanz, J.; Ustin, S.L. Generation of crown bulk density for Pinus sylvestris L. from lidar. Remote Sens. Environ. 2004, 92, 345–352. [Google Scholar] [CrossRef]
- Calders, K.; Adams, J.; Armston, J.; Bartholomeus, H.; Bauwens, S.; Bentley, L.P.; Chave, J.; Danson, F.M.; Demol, M.; Disney, M. Terrestrial laser scanning in forest ecology: Expanding the horizon. Remote Sens. Environ. 2020, 251, 112102. [Google Scholar] [CrossRef]
- Ye, W.; Qian, C.; Tang, J.; Liu, H.; Fan, X.; Liang, X.; Zhang, H. Improved 3D Stem Mapping Method and Elliptic Hypothesis-Based DBH Estimation from Terrestrial Laser Scanning Data. Remote Sens. 2020, 12, 352. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.; Wang, J.; Dong, P.; Chen, Y.; Liu, Z. Estimating Individual Tree Height and Diameter at Breast Height (DBH) from Terrestrial Laser Scanning (TLS) Data at Plot Level. Forests 2018, 9, 398. [Google Scholar] [CrossRef] [Green Version]
- Novotny, J.; Navratilova, B.; Albert, J.; Cienciala, E.; Fajmon, L.; Brovkina, O. Comparison of spruce and beech tree attributes from field data, airborne and terrestrial laser scanning using manual and automatic methods. Remote Sens. Appl. Soc. Environ. 2021, 23, 100574. [Google Scholar] [CrossRef]
- Dalla Corte, A.P.; Rex, F.E.; Almeida, D.R.A.d.; Sanquetta, C.R.; Silva, C.A.; Moura, M.M.; Wilkinson, B.; Zambrano, A.M.A.; Cunha Neto, E.M.d.; Veras, H.F.P.; et al. Measuring Individual Tree Diameter and Height Using GatorEye High-Density UAV-Lidar in an Integrated Crop-Livestock-Forest System. Remote Sens. 2020, 12, 863. [Google Scholar] [CrossRef] [Green Version]
- Pilarska, M.; Ostrowski, W.; Bakuła, K.; Górski, K.; Kurczyński, Z. The Potential Of Light Laser Scanners Developed For Unmanned Aerial Vehicles-The Review and Accuracy. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 42, 87–95. [Google Scholar] [CrossRef] [Green Version]
- Liu, K.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Estimating forest structural attributes using UAV-LiDAR data in Ginkgo plantations. ISPRS J. Photogramm. Remote Sens. 2018, 146, 465–482. [Google Scholar] [CrossRef]
- Yao, W.; Krzystek, P.; Heurich, M. Tree species classification and estimation of stem volume and DBH based on single tree extraction by exploiting airborne full-waveform LiDAR data. Remote Sens. Environ. 2012, 123, 368–380. [Google Scholar] [CrossRef]
- Popescu, S.C. Estimating biomass of individual pine trees using airborne lidar. Biomass Bioenergy 2007, 31, 646–655. [Google Scholar] [CrossRef]
- Hao, Y.; Widagdo, F.R.A.; Liu, X.; Quan, Y.; Dong, L.; Li, F. Individual Tree Diameter Estimation in Small-Scale Forest Inventory Using UAV Laser Scanning. Remote Sens. 2021, 13, 24. [Google Scholar] [CrossRef]
- Bottalico, F.; Chirici, G.; Giannini, R.; Mele, S.; Mura, M.; Puxeddu, M.; McRoberts, R.; Valbuena, R.; Travaglini, D. Modeling Mediterranean forest structure using airborne laser scanning data. Int. J. Appl. Earth Obs. Geoinf. 2017, 57, 145–153. [Google Scholar] [CrossRef]
- Ou, Q.; Lei, X.; Sheng, C.; Song, G. Individual tree DBH growth prediction of larch-spruce-fir mixed forests based on random forest algorithm. J. Beijing For. Univ. 2019, 41, 9–19. [Google Scholar] [CrossRef]
- Corte, A.P.D.; Souza, D.V.; Rex, F.E.; Sanquetta, C.R.; Mohan, M.; Silva, C.A.; Zambrano, A.M.A.; Prata, G.; Alves de Almeida, D.R.; Trautenmüller, J.W.; et al. Forest inventory with high-density UAV-Lidar: Machine learning approaches for predicting individual tree attributes. Comput. Electron. Agric. 2020, 179, 105815. [Google Scholar] [CrossRef]
- Sun, Y.; Jin, X.; Pukkala, T.; Li, F. Predicting Individual Tree Diameter of Larch (Larix olgensis) from UAV-LiDAR Data Using Six Different Algorithms. Remote Sens. 2022, 14, 1125. [Google Scholar] [CrossRef]
- Vandendaele, B.; Fournier, R.A.; Vepakomma, U.; Pelletier, G.; Lejeune, P.; Martin-Ducup, O. Estimation of Northern Hardwood Forest Inventory Attributes Using UAV Laser Scanning (ULS): Transferability of Laser Scanning Methods and Comparison of Automated Approaches at the Tree- and Stand-Level. Remote Sens. 2021, 13, 2796. [Google Scholar] [CrossRef]
- Wieser, M.; Mandlburger, G.; Hollaus, M.; Otepka, J.; Glira, P.; Pfeifer, N. A Case Study of UAS Borne Laser Scanning for Measurement of Tree Stem Diameter. Remote Sens. 2017, 9, 1154. [Google Scholar] [CrossRef] [Green Version]
- Brede, B.; Lau, A.; Bartholomeus, H.M.; Kooistra, L. Comparing RIEGL RiCOPTER UAV LiDAR derived canopy height and DBH with terrestrial LiDAR. Sensors 2017, 17, 2371. [Google Scholar] [CrossRef]
- Jaakkola, A.; Hyyppä, J.; Yu, X.; Kukko, A.; Kaartinen, H.; Liang, X.; Hyyppä, H.; Wang, Y. Autonomous Collection of Forest Field Reference—The Outlook and a First Step with UAV Laser Scanning. Remote Sens. 2017, 9, 785. [Google Scholar] [CrossRef] [Green Version]
- Kuželka, K.; Slavík, M.; Surový, P. Very High Density Point Clouds from UAV Laser Scanning for Automatic Tree Stem Detection and Direct Diameter Measurement. Remote Sens. 2020, 12, 1236. [Google Scholar] [CrossRef] [Green Version]
- Hyyppä, E.; Kukko, A.; Kaartinen, H.; Yu, X.; Muhojoki, J.; Hakala, T.; Hyyppä, J. Direct and automatic measurements of stem curve and volume using a high-resolution airborne laser scanning system. Sci. Remote Sens. 2022, 5, 100050. [Google Scholar] [CrossRef]
- Xu, Y.; Yao, L. Integrating Climate Change Adaptation and Mitigation into Land Use Optimization: A Case Study in Huailai County, China. Land 2021, 10, 1297. [Google Scholar] [CrossRef]
- Hu, T.; Sun, X.; Su, Y.; Guan, H.; Sun, Q.; Kelly, M.; Guo, Q. Development and performance evaluation of a very low-cost UAV-LiDAR system for forestry applications. Remote Sens. 2021, 13, 77. [Google Scholar] [CrossRef]
- Qi, J.; Xie, D.; Guo, D.; Yan, G. A large-scale emulation system for realistic three-dimensional (3-D) forest simulation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4834–4843. [Google Scholar] [CrossRef]
- Qi, J.; Xie, D.; Yin, T.; Yan, G.; Gastellu-Etchegorry, J.-P.; Li, L.; Zhang, W.; Mu, X.; Norford, L.K. LESS: LargE-Scale remote sensing data and image simulation framework over heterogeneous 3D scenes. Remote Sens. Environ. 2019, 221, 695–706. [Google Scholar] [CrossRef]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Cai, S.; Zhang, W.; Liang, X.; Wan, P.; Qi, J.; Yu, S.; Yan, G.; Shao, J. Filtering Airborne LiDAR Data Through Complementary Cloth Simulation and Progressive TIN Densification Filters. Remote Sens. 2019, 11, 1037. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Ye, C.; Guo, Z.; Wei, R.; Wang, L.; Li, J. A Fast Progressive TIN Densification Filtering Algorithm for Airborne LiDAR Data Using Adjacent Surface Information. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 12492–12503. [Google Scholar] [CrossRef]
- Serifoglu Yilmaz, C.; Gungor, O. Comparison of the performances of ground filtering algorithms and DTM generation from a UAV-based point cloud. Geocarto Int. 2018, 33, 522–537. [Google Scholar] [CrossRef]
- Shi, X.; Ma, H.; Chen, Y.; Zhang, L.; Zhou, W. A parameter-free progressive TIN densification filtering algorithm for lidar point clouds. Int. J. Remote Sens. 2018, 39, 6969–6982. [Google Scholar] [CrossRef]
- Bruggisser, M.; Hollaus, M.; Otepka, J.; Pfeifer, N. Influence of ULS acquisition characteristics on tree stem parameter estimation. ISPRS J. Photogramm. Remote Sens. 2020, 168, 28–40. [Google Scholar] [CrossRef]
- Chen, J.; Chen, Y.; Liu, Z. Extraction of Forestry Parameters Based on Multi-Platform LiDAR. IEEE Access 2022, 10, 21077–21094. [Google Scholar] [CrossRef]
- Lee Rodgers, J.; Nicewander, W.A. Thirteen ways to look at the correlation coefficient. Am. Stat. 1988, 42, 59–66. [Google Scholar] [CrossRef]
- Nagelkerke, N.J. A note on a general definition of the coefficient of determination. Biometrika 1991, 78, 691–692. [Google Scholar] [CrossRef]
- Sedgwick, P. Pearson’s correlation coefficient. BMJ 2012, 345, e4483. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Nie, S.; Wang, C.; Xi, X.; Wang, J.; Li, D.; Zhou, H.J.I.G.; Letters, R.S. A noise removal algorithm based on OPTICS for photon-counting LiDAR data. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1471–1475. [Google Scholar] [CrossRef]
- Chai, T.; Draxler, R.R. Root mean square error (RMSE) or mean absolute error (MAE). Geosci. Model Dev. Discuss. 2014, 7, 1525–1534. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Type | Value | Parameter Type | Value |
|---|---|---|---|
| Weight | 3.85 kg | Maximum pulse frequency | 550 kHz |
| Elevation accuracy | 25 mm | Point repeatability | 25 mm |
| Minimum measurement distance | 5 m | Maximum measuring distance | 1150 m |
| Flight speed | 5–8 m/s | Endurance time | 20 min |
| ID | Scanning Angle | ID | Scanning Angle | ID | Scanning Angle | ID | Scanning Angle |
|---|---|---|---|---|---|---|---|
| 1 | 43.73 | 6 | 57.36 | 11 | 65.71 | 16 | 79.47 |
| 2 | 45.6 | 7 | 58.64 | 12 | 69.23 | 17 | 80.25 |
| 3 | 49.69 | 8 | 59.92 | 13 | 70.88 | 18 | 86.98 |
| 4 | 52.07 | 9 | 60.12 | 14 | 76.88 | 19 | 88.64 |
| 5 | 53.12 | 10 | 65.52 | 15 | 77.99 |
| Parameter Type | Value | Parameter Type | Value |
|---|---|---|---|
| Altitude | 100 m | Minimum measurement distance | 80 m |
| Swath width | 200 m | Maximum measurement distance | 150 m |
| Resolution | 0.1 m | Point density | 100 pts/m2 |
| Parameter type | Value | Parameter type | Value |
| Altitude | 100 m | Minimum measurement distance | 80 m |
| Real Data | Simulated Data | |
|---|---|---|
| Trunk accuracy (%) | 95.80 | 95.10 |
| DBH R2 | 0.708 | 0.882 |
| DBH RMSE (m) | 0.021 | 0.016 |
| Real Data | Simulated Data | ||||||
|---|---|---|---|---|---|---|---|
| Average Scanning Angle | Trunk Accuracy (%) | DBH R2 | DBH RMSE (m) | Average Scanning Angle | TrunkAccuracy (%) | DBH R2 | DBH RMSE (m) |
| 53.33 | 73.43 | 0.307 | 0.038 | 45 | 64.34 | 0.738 | 0.045 |
| 57.23 | 78.32 | 0.674 | 0.021 | 50 | 86.01 | 0.748 | 0.030 |
| 58.98 | 80.42 | 0.618 | 0.022 | 55 | 88.81 | 0.849 | 0.022 |
| 65.13 | 79.72 | 0.552 | 0.022 | 60 | 86.01 | 0.760 | 0.029 |
| 67.80 | 76.22 | 0.539 | 0.024 | 65 | 76.92 | 0.725 | 0.034 |
| 76.23 | 69.23 | 0.406 | 0.033 | 70 | 59.44 | 0.600 | 0.039 |
| 78.58 | 60.84 | 0.320 | 0.036 | 75 | 55.94 | 0.560 | 0.046 |
| Modes | Real Data | Simulated Data | ||||
|---|---|---|---|---|---|---|
| Trunk Accuracy (%) | DBH R2 | DBH RMSE (m) | Trunk Accuracy (%) | DBH R2 | DBH RMSE (m) | |
| Single Route | 18.88 | 0.485 | 0.050 | 14.69 | 0.455 | 0.068 |
| Double Routes | 32.87 | 0.595 | 0.088 | 51.05 | 0.670 | 0.030 |
| Triple Routes | 62.94 | 0.645 | 0.022 | 76.92 | 0.780 | 0.030 |
| Quadruple Routes | 78.32 | 0.674 | 0.021 | 88.81 | 0.849 | 0.022 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, B.; Nie, S.; Wang, C.; Xi, X.; Wang, J.; Zhou, G.; Wang, H. Exploring the Potential of UAV LiDAR Data for Trunk Point Extraction and Direct DBH Measurement. Remote Sens. 2022, 14, 2753. https://doi.org/10.3390/rs14122753
Feng B, Nie S, Wang C, Xi X, Wang J, Zhou G, Wang H. Exploring the Potential of UAV LiDAR Data for Trunk Point Extraction and Direct DBH Measurement. Remote Sensing. 2022; 14(12):2753. https://doi.org/10.3390/rs14122753
Chicago/Turabian StyleFeng, Baokun, Sheng Nie, Cheng Wang, Xiaohuan Xi, Jinliang Wang, Guoqing Zhou, and Haoyu Wang. 2022. "Exploring the Potential of UAV LiDAR Data for Trunk Point Extraction and Direct DBH Measurement" Remote Sensing 14, no. 12: 2753. https://doi.org/10.3390/rs14122753
APA StyleFeng, B., Nie, S., Wang, C., Xi, X., Wang, J., Zhou, G., & Wang, H. (2022). Exploring the Potential of UAV LiDAR Data for Trunk Point Extraction and Direct DBH Measurement. Remote Sensing, 14(12), 2753. https://doi.org/10.3390/rs14122753