
Kinematic Galileo and GPS Performances in Aerial, Terrestrial, and Maritime Environments

 , , , , , ,
, , , , , ,
Abstract
:1. Introduction
1.1. Galileo Reference Centre
- data provision from a regional and worldwide network
- orbits and clock reference products
- consolidated navigation («Broadcast Galileo» BRDG) files
- KPIs Generation
- Signal in Space (SIS) monitoring
- Satellite Laser Ranging (SLR) campaign
- ionospheric monitoring:
- ○
- ionospheric reference products, and
- ○
- NeQuick G model performance
- data provision from measurement campaign (based using vehicles, vessels and aircraft)
- expertise available at the Member-State level.
1.2. User Needs and Requirements in the Aerial, Maritime, and Terrestrial Domains
2. Materials and Methods
2.1. Data-Collection Campaigns
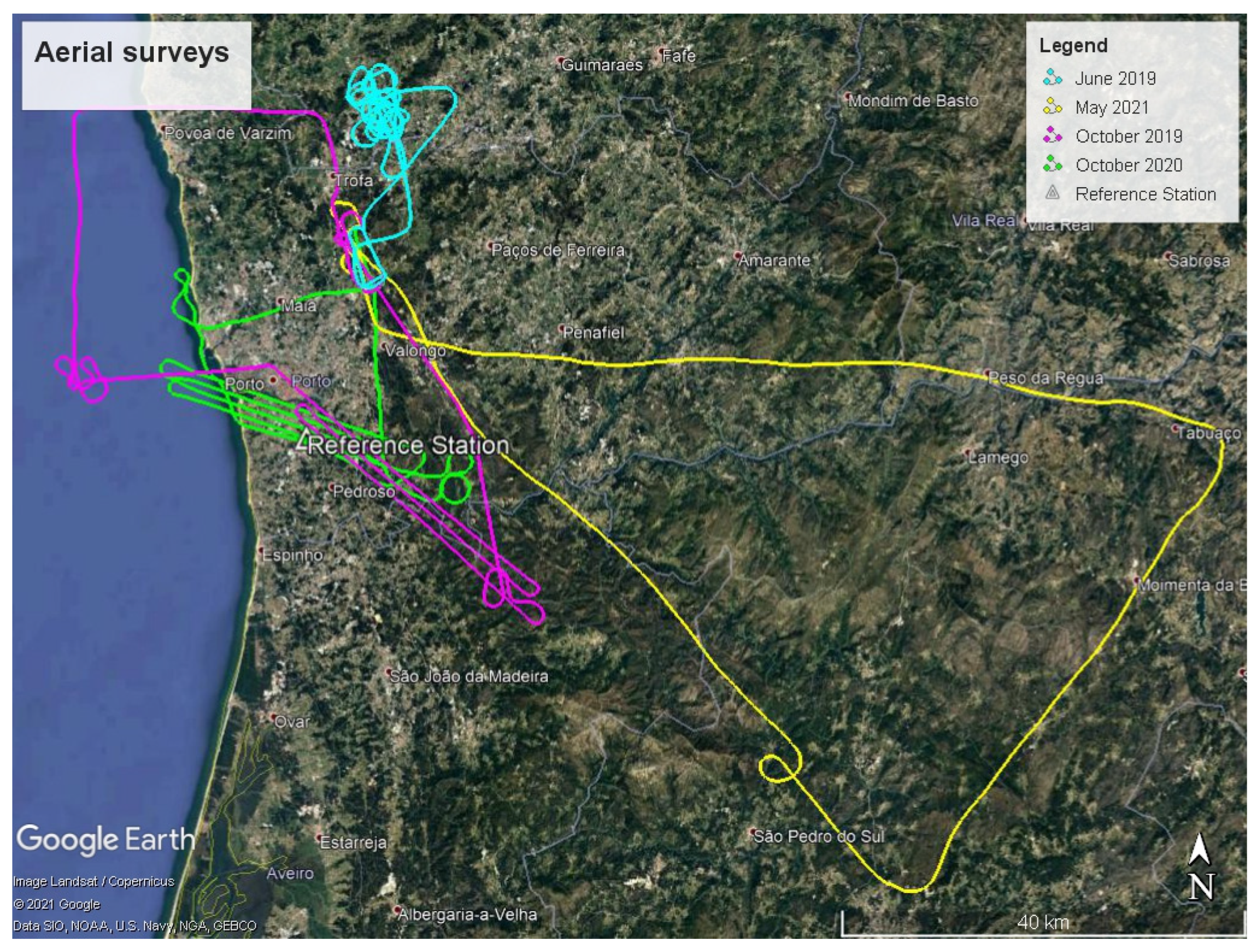
2.1.1. Experimental Setup for the Aerial Data-collection Campaigns
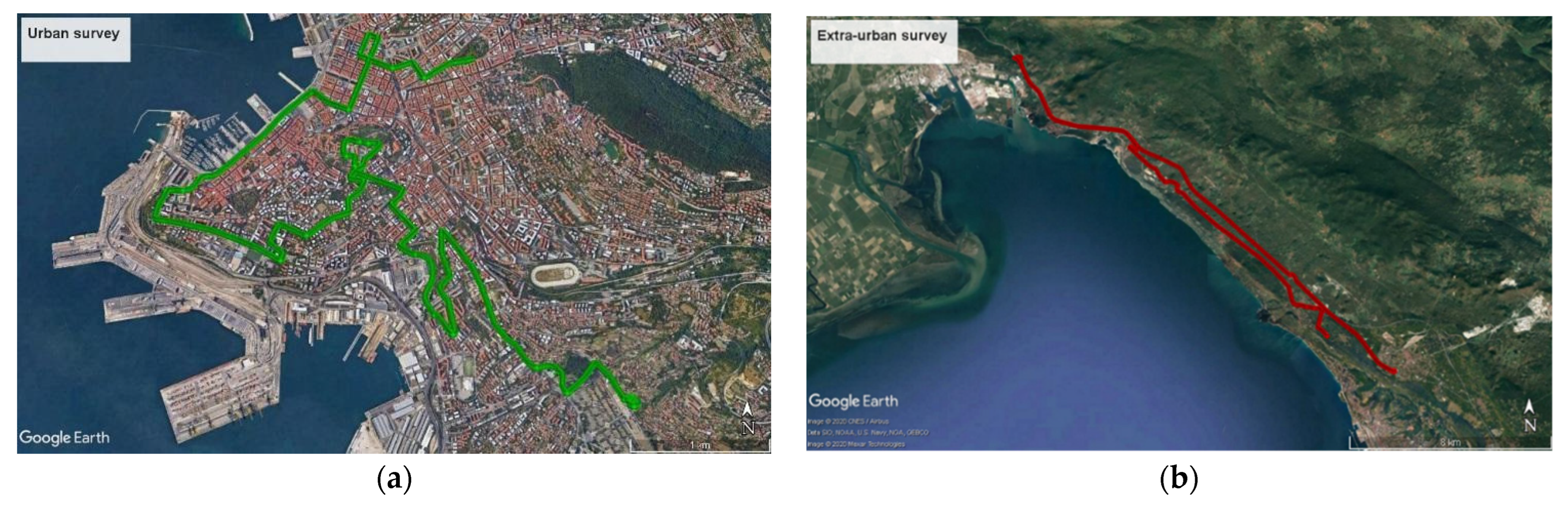
2.1.2. Experimental Setup for the Terrestrial Data-Collection Campaigns
2.1.3. Experimental Setup for the Maritime Data-Collection Campaigns
2.2. Reference Solutions
2.3. GNSS Solutions
3. Results and Discussion
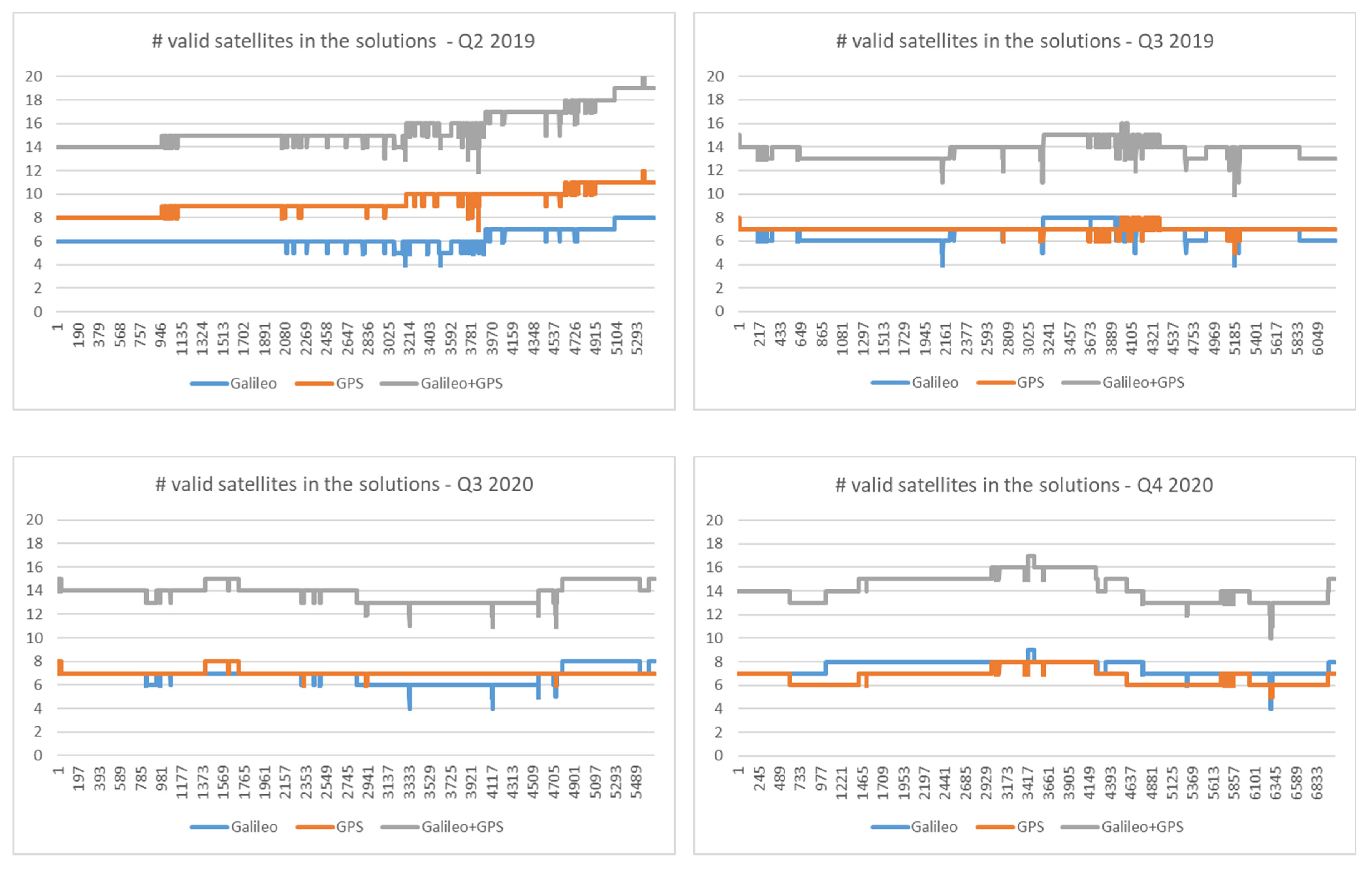
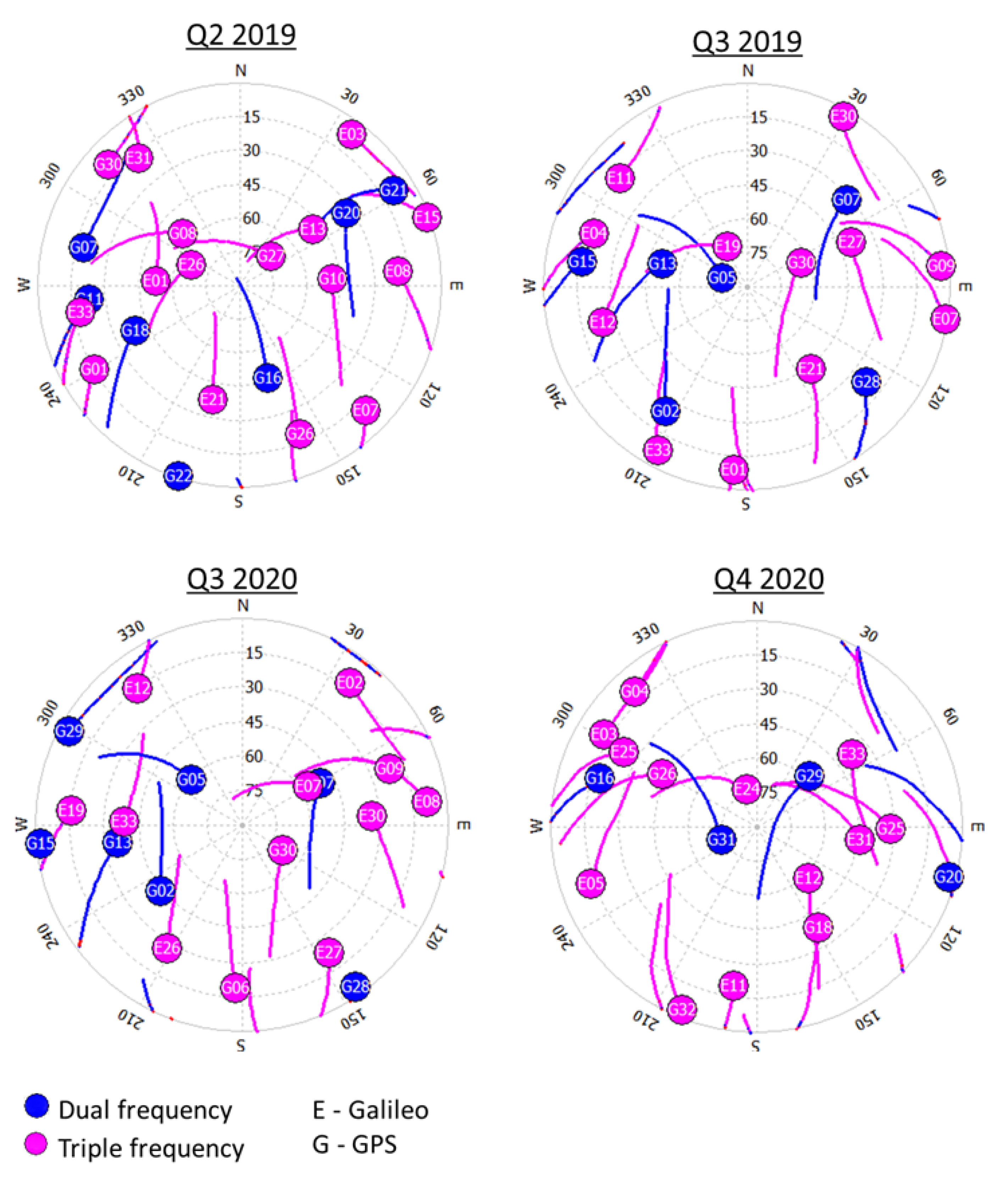
3.1. Results and Discussion for the Aerial Data-Collection Campaigns
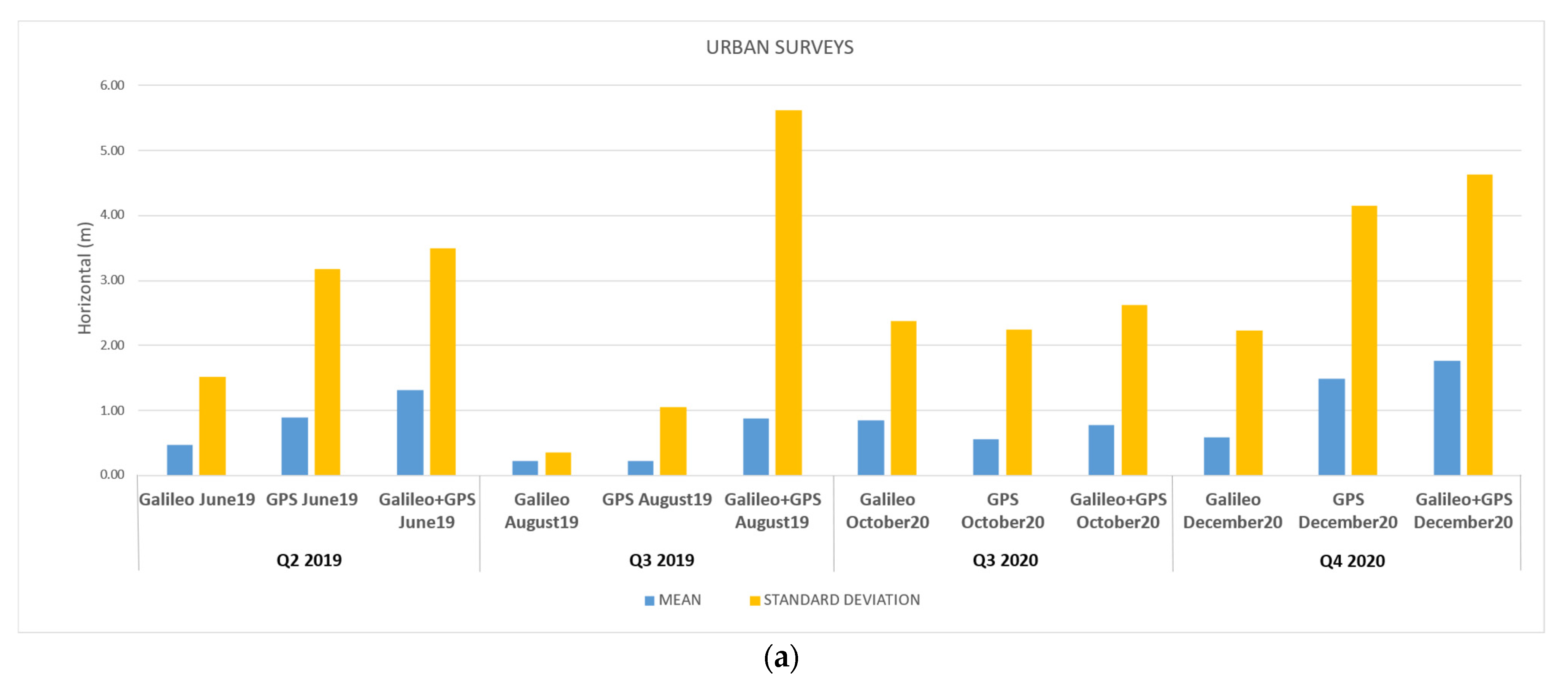
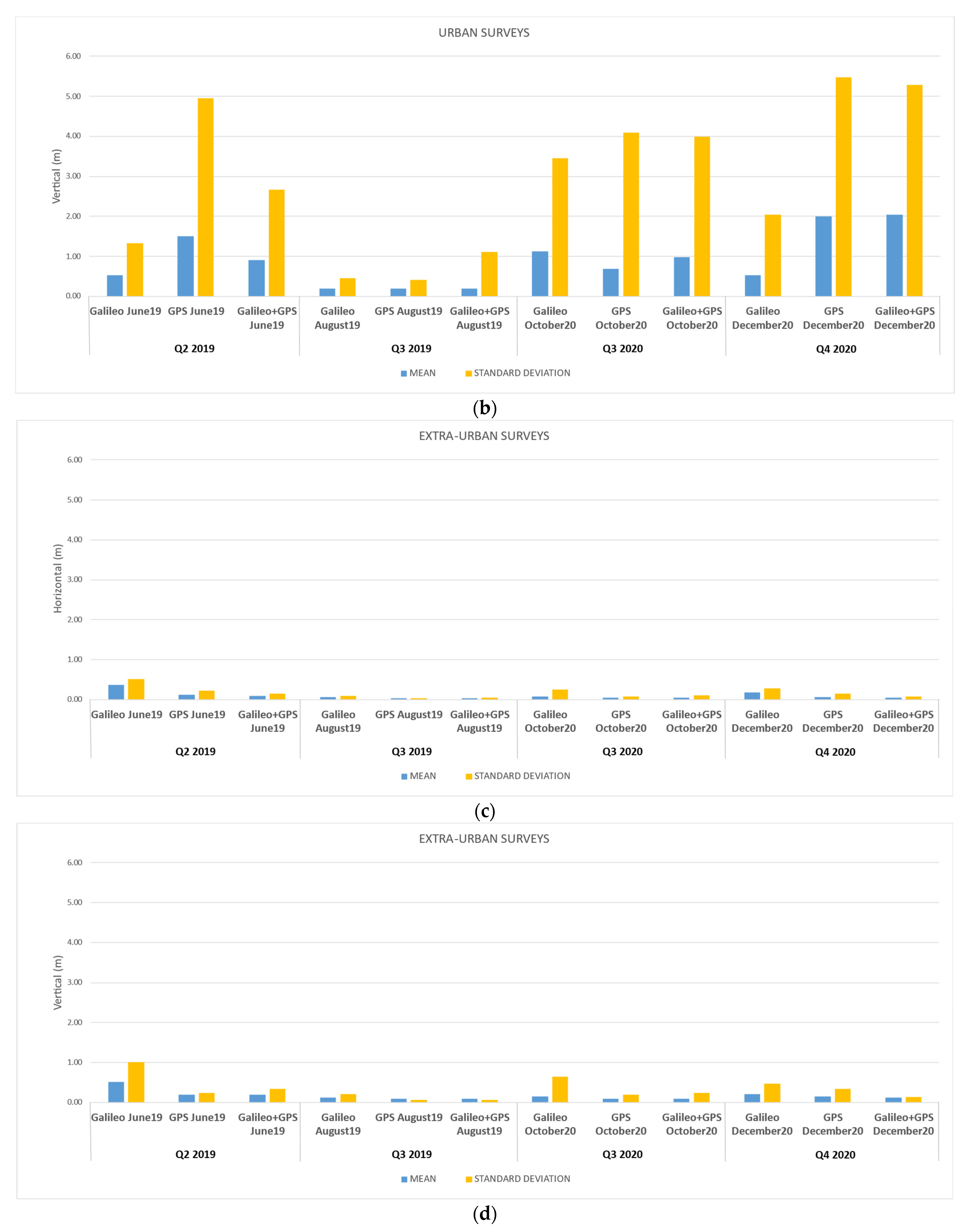
3.2. Results and Discussion for the Terrestrial Data-Collection Campaigns
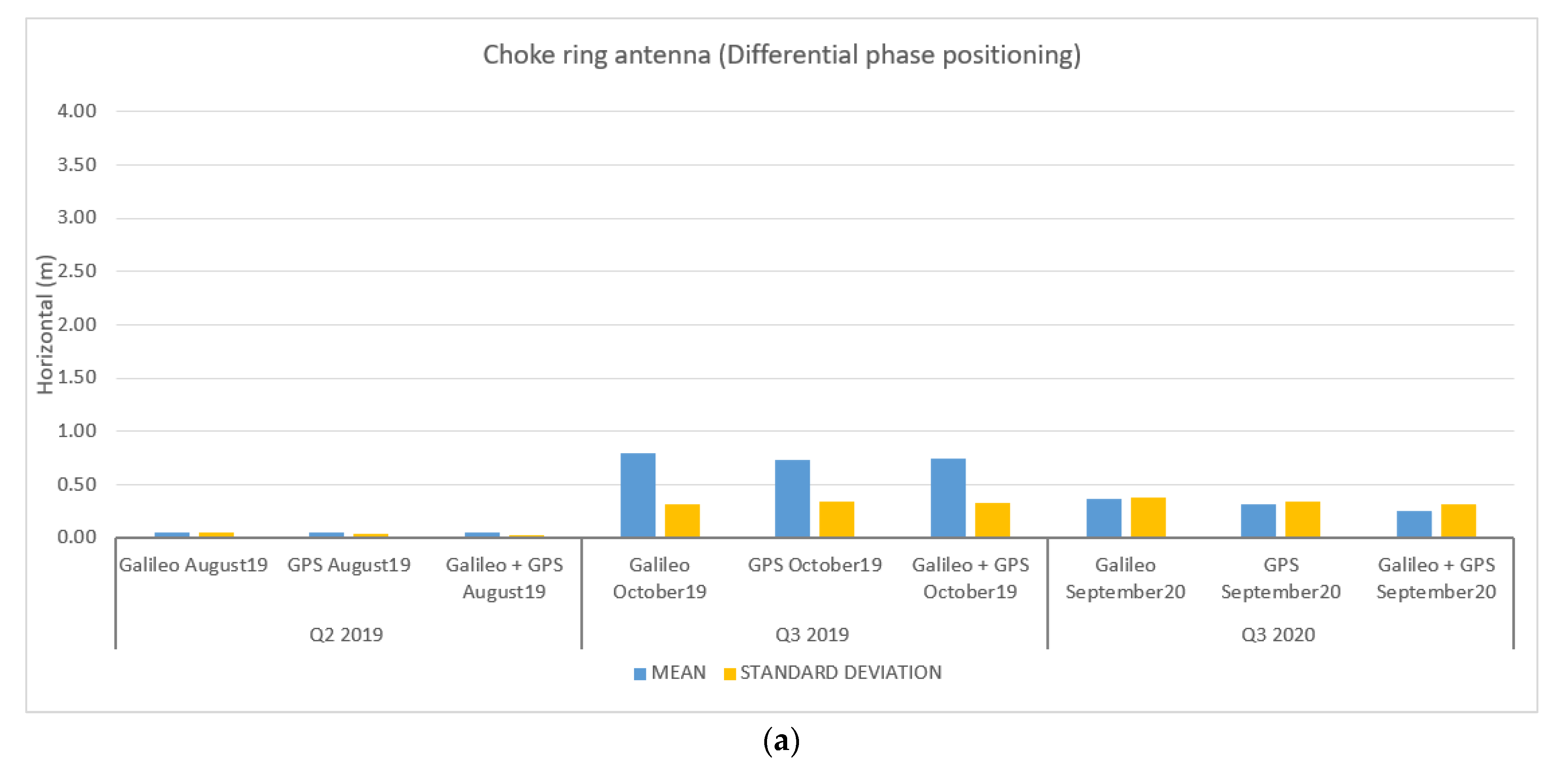
3.3. Results and Discussion for the Maritime Data-Collection Campaigns
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Someswar, G.M.; Rao, T.P.S.C.; Chigurukota, D.R. Global Navigation Satellite Systems and Their Applications. Int. J. Softw. Web Sci. 2013, 3, 17–23. [Google Scholar]
- Hall, E. History of the GNSS Industry and Milestones Ahead. GPS World. 2020. Available online: https://www.gpsworld.com/history-of-the-gnss-industry-and-milestones-ahead/ (accessed on 27 May 2022).
- Lavrov, A. Russia’s GLONASS Satellite Constellation. Moscow Defense Brief. 2017. Available online: http://cast.ru/products/articles/russia-s-glonass-satellite-constellation.html (accessed on 27 May 2022).
- BeiDou Navigation Satellite System. Available online: http://en.beidou.gov.cn/SYSTEMS/System/ (accessed on 19 April 2022).
- European Parliament and Council. Regulation (EU) No 1285/2013 of the European Parliament and of the Council of 11 December 2013 on the Implementation and Exploitation of European Satellite Navigation Systems. Off. J. Eur. Union 2013, 56, 1–32. [Google Scholar] [CrossRef]
- Tarantino, E.; Novelli, A.; Cefalo, R.; Sluga, T.; Tommasi, A. Single-Frequency Kinematic Performance Comparison between Galileo, GPS, and GLONASS Satellite Positioning Systems Using an MMS-Generated Trajectory as a Reference: Preliminary Results. ISPRS Int. J. Geo-Inf. 2018, 7, 122. [Google Scholar] [CrossRef] [Green Version]
- Odijk, D.; Teunissen, P.J.; Huisman, L. First results of mixed GPS + GIOVE single-frequency RTK in Australia. J. Spat. Sci. 2012, 57, 3–18. [Google Scholar] [CrossRef]
- Abd Rabbou, M.; El-Rabbany, A. Performance Analysis of GPS/GALILEO PPP Model for Static and Kinematic Applications. Geomatica 2015, 69, 75–81. [Google Scholar] [CrossRef]
- Rabbou, M.; El-Rabbany, A. Performance analysis of precise point positioning using multi-constellation GNSS: GPS, GLONASS, Galileo and BeiDou. Surv. Rev. 2017, 49, 39–50. [Google Scholar] [CrossRef]
- Liu, T.; Yuan, Y.; Zhang, B.; Wang, N.; Tan, B.; Chen, Y. Multi-GNSS precise point positioning (MGPPP) using raw observations. J. Geod. 2017, 91, 253–268. [Google Scholar] [CrossRef]
- Afifi, A.; El-Rabbany, A. Single Frequency GPS/Galileo Precise Point Positioning Using Un-Differenced and Between-Satellite Single Difference Measurements. Geomatica 2015, 68, 195–205. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.; Odijk, D. Combined BDS, Galileo, QZSS and GPS single-frequency RTK. GPS Solut. 2014, 19, 151–163. [Google Scholar] [CrossRef]
- Li, P.; Jiang, X.; Zhang, X.; Ge, M.; Schuh, H. GPS + Galileo + BeiDou precise point positioning with triple-frequency ambiguity resolution. GPS Solut. 2020, 24, 1–13. [Google Scholar] [CrossRef]
- Pan, L.; Zhang, X.; Liu, J. A comparison of three widely used GPS triple-frequency precise point positioning models. GPS Solut. 2019, 23, 121. [Google Scholar] [CrossRef]
- Rabbou, M.A.; Abdelazeem, M.; Morsy, S. Performance Evaluation of Triple-Frequency GPS/Galileo Techniques for Precise Static and Kinematic Applications. Sensors 2021, 21, 3396. [Google Scholar] [CrossRef] [PubMed]
- Song, J.; Zhao, L. Comparison Analysis on the Accuracy of Galileo PPP Using Different Frequency Combinations in Europe. Appl. Sci. 2021, 11, 10020. [Google Scholar] [CrossRef]
- Katsigianni, G.; Perosanz, F.; Loyer, S.; Gupta, M. Galileo millimeter-level kinematic precise point positioning with ambiguity resolution. Earth Planets Space 2019, 71, 76. [Google Scholar] [CrossRef] [Green Version]
- Krasuski, K.; Bakuła, M. Operation and reliability of an onboard GNSS receiver during an in-flight test. Sci. J. Sil. Univ. Technol. Ser. Transp. 2021, 111, 75–88. [Google Scholar] [CrossRef]
- Li, M.; Xu, T.; Flechtner, F.; Förste, C.; Lu, B.; He, K. Improving the Performance of Multi-GNSS (Global Navigation Satellite System) Ambiguity Fixing for Airborne Kinematic Positioning over Antarctica. Remote Sens. 2019, 11, 992. [Google Scholar] [CrossRef] [Green Version]
- Dautermann, T.; Korn, B.; Flaig, K.; de Haag, M.U. GNSS Double Differences Used as Beacon Landing System for Aircraft Instrument Approach. Int. J. Aeronaut. Space Sci. 2021, 22, 1455–1463. [Google Scholar] [CrossRef]
- Hinüber, E.L.V.; Reimer, C.; Schneider, T.; Stock, M. INS/GNSS Integration for Aerobatic Flight Applications and Aircraft Motion Surveying. Sensors 2017, 17, 941. [Google Scholar] [CrossRef] [Green Version]
- Elmezayen, A.; El-Rabbany, A. Real-Time GPS/Galileo Precise Point Positioning Using NAVCAST Real-Time Corrections. Positioning 2019, 10, 35–49. [Google Scholar] [CrossRef] [Green Version]
- Martin, S.; Kuhlen, H.; Schlotzer, S.; Schmitz-Peiffer, A.; Voithenberg, M.v.; Dietz, H. SEA GATE—A Maritime Galileo Testbed in the Port of Rostock. In Proceedings of the 20th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2007), Fort Worth, TX, USA, 25–28 September 2007; pp. 535–542. [Google Scholar]
- Forschungshafen Rostock. Available online: https://www.forschungshafen.de/en/galileo-testbed-sea-gate/ (accessed on 27 May 2022).
- European GNSS Service Centre. Available online: https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo_OS_SIS_ICD_v2.0.pdf (accessed on 27 May 2022).
- Marila, S.; Andrei, O.; Koivula, H.; Häkli, P.; Bilker-Koivula, M. GNSS Positioning Aspects for the Intelligent Shipping Test Laboratory at Rauma Harbor. In Proceedings of the International Conference on Localization and GNSS (ICL-GNSS 2020), Tampere, Finland, 2–4 June 2020. [Google Scholar]
- Buist, P.; Mozo, A.; Tork, H. Overview of the Galileo Reference Centre: Mission Architecture and Operational Concept. In Proceedings of the 30th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS + 2017), Portland, OR, USA, 25–29 September 2017; pp. 1485–1495. [Google Scholar] [CrossRef]
- EUSPA. Available online: https://www.gsa.europa.eu/newsroom/news/galileo-reference-centre-now-officially-open (accessed on 27 May 2022).
- EUSPA. GSA Market Report Issue 6. 2019. Available online: https://www.gsa.europa.eu/gnss-market-report-issue-6-october-2019 (accessed on 27 May 2022).
- IMO (International Maritime Organization). Resolution, A.915(22), Adopted on 29 November 2001-Revised Maritime Policy and Requirements for a Future Global Navigation Satellite System (GNSS). Available online: https://wwwcdn.imo.org/localresources/en/KnowledgeCentre/IndexofIMOResolutions/AssemblyDocuments/A.915(22).pdf (accessed on 27 May 2022).
- Applanix Corporation. PUBS-MAN-001768-POSPacTM MMSTM GNSS-Inertial Tools Software Version 7.2, Revision 12-User Guide; Applanix Corporation: Richmond Hill, ON, Canada, 2016. [Google Scholar]
- Quan, W.; Li, J.; Gong, X.; Fang, J. INS/CNS/GNSS Integrated Navigation Technology; Springer: Berlin/Heidelberg, Germany, 2015; ISBN 978-3-662-45158-8. [Google Scholar]
- Cefalo, R.; Grandi, G.; Roberti, R.; Sluga, T. Extraction of Road Geometric Parameters from High Resolution Remote Sensing Images Validated by GNSS/INS Geodetic Techniques. In Proceedings of the Computational Science and Its Applications—ICCSA 2017, Trieste, Italy, 3–6 July 2017; Springer: Cham, Switzerland, 2017; Volume 10407, pp. 181–195. [Google Scholar] [CrossRef]
- Romanian Maritime Hydrographic Directorate Website. Available online: https://www.dhmfn.ro/en/catuneanu.shtml (accessed on 27 May 2022).
- IMO (International Maritime Organization). Resolution A.694(17), Adopted on 6 November 1991-General Requirements for Shipborne Radio Equipment Forming Part of the Global Maritime Distress and Safety System (GMDSS) and for Electronic Navigational AIDS. Available online: https://wwwcdn.imo.org/localresources/en/KnowledgeCentre/IndexofIMOResolutions/AssemblyDocuments/A.694(17).pdf (accessed on 27 May 2022).
- Canadian Spatial Reference System Precise Point Positioning (CSRS-PPP) Service. Available online: https://webapp.geod.nrcan.gc.ca/geod/tools-outils/ppp.php?locale=en (accessed on 27 May 2022).
- Takasu, T. RTKLIB: An Open Source Program Package for GNSS Positioning. Available online: http://www.rtklib.com/ (accessed on 27 May 2022).
- Klobuchar, J.A. Ionospheric Time-Delay Algorithm for Single-Frequency GPS Users. IEEE Trans. Aerosp. Electron. Syst. 1987, AES-23, 325–331. [Google Scholar] [CrossRef]
- Saastamoinen, J. Contributions to the theory of atmospheric refraction. Bull. Geod. 1973, 107, 13–34. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. IERS Conventions. IERS Technical Note No. 36, 2010. Verlag des Bundesamts fur Kartographie und Geodasie, Frankfurt am Main. 2010. Available online: https://www.iers.org/IERS/EN/Publications/TechnicalNotes/tn36.html (accessed on 27 May 2022).
- Romanian Position Determination System. Available online: https://rompos.ro/ (accessed on 27 May 2022).
- EUREF Permanent GNSS Network. Available online: http://www.epncb.oma.be (accessed on 27 May 2020).
- Regione Autonoma Friuli-Venezia Giulia—Rete GNSS. Available online: http://www.regione.fvg.it/rafvg/cms/RAFVG/ambiente-territorio/conoscere-ambiente-territorio/FOGLIA1/ (accessed on 27 May 2022).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Applications | Non-Safety Navigation (Relevant for General Aviation Visual Flight Rules (VFR)) | Performance Based Navigation (Relevant for all Instrument Flight Rules (IFR)) | Surveillance (Including ADS-B) |
|---|---|---|---|
| Key GNSS requirements | Availability | Accuracy (16 m horizontally, 4 m vertically for 95% of the time), Availability (99–99.999%), Continuity, Integrity Robustness | Accuracy, Availability, Integrity, Robustness |
| Applications | Safety Related Automatic Actions in V2X, Autonomous Driving, eCall, Tracking and Tracing of Dangerous Goods | Liability: RUC, Pay-as-you-Drive, Taxi Meter, Smart Tachograph | Smart Mobility: Road Navigation Automated Parking Dynamic Ride Sharing | ||
|---|---|---|---|---|---|
| Key GNSS requirements | Accuracy (decimeter-level) Authentication Availability (>99.5%) | Integrity Robustness TTFF | Accuracy (decimeter-level) Authentication Availability (>99.5%) | Integrity Robustness TTFF | Authentication Integrity |
| Other requirements | Connectivity (mainly short range) Interoperability | Connectivity (short range and long range) | Connectivity (long range) | ||
| Applications | Navigation 1 | Ship Operations | Traffic Management and Tracking | Search and Rescue | Port Operations | Engineering and Offshore |
|---|---|---|---|---|---|---|
| Key GNSS requirements | Accuracy (from meter to 10 m) | Accuracy (from sub-meter to 10 m) | Availability | Accuracy (final approach 5 m) | Accuracy (sub-meter) | Accuracy (sub-meter) Availability |
| Availability | Availability | Continuity | Availability | Availability | Integrity | |
| Integrity | Integrity | Integrity | TIFF |
| Quarter | Data-Collection Type | Date | Approximate Duration | PVT Solution Computation Technique | Reference Trajectory Computation Method |
|---|---|---|---|---|---|
| Q2 2019 | Aeronautical | 5 June 2019 | 1.5 h | TF 1 (phase differential) | |
| SF 2 (phase differential) | GPS/IMU 4 (differential) | ||||
| SPP 3 (code only) | PPP 5 | ||||
| Terrestrial (urban) | 3 June 2019 | 1 h | DF 6 (phase differential) | GNSS/IMU (differential) PPP | |
| Terrestrial (extra-urban) | 3 June 2019 | 1.2 h | DF (phase differential) | GNSS/IMU (differential) PPP | |
| Maritime | 16 August 2019 | 2 h | TF (phase differential) SPP (code only) | PPP | |
| Q3 2019 | Aeronautical | 7 October 2019 | 1.7 h | TF (phase differential) | |
| SF (phase differential) | GPS/IMU (differential) | ||||
| SPP (code only) | PPP | ||||
| Terrestrial (urban) | 6 August 2019 | 1 h | DF (phase differential) | GNSS/IMU (differential) PPP | |
| Terrestrial (extra-urban) | 6 August 2019 | 1.2 h | DF (phase differential) | GNSS/IMU (differential) PPP | |
| Maritime | 2 October 2019 | 2 h | TF (phase differential) SPP (code only) | PPP | |
| Q3 2020 | Aeronautical | 7 October 2019 | 1.5 h | TF (phase differential) | |
| SF (phase differential) | GPS/IMU (differential) | ||||
| SPP (code only) | PPP | ||||
| Terrestrial (urban) | 27 October 2020 | 1.2 h | DF (phase differential) | GNSS/IMU (differential) PPP | |
| Terrestrial (extra-urban) | 27 October 2020 | 1.2 h | DF (phase differential) | GNSS/IMU (differential) PPP | |
| Maritime | 8 September 2020 | 2 h | TF (phase differential) SPP (code only) | PPP | |
| Q4 2020 7 | Aeronautical | 8 May 2021 | 2 h | TF (phase differential) | |
| SF (phase differential) | GPS/IMU (differential) | ||||
| SPP (code only) | PPP | ||||
| Terrestrial (urban) | 18 December 2020 | 1.4 h | DF (phase differential) | GNSS/IMU (differential) PPP | |
| Terrestrial (extra-urban) | 18 December 2020 | 1.3 h | DF (phase differential) | GNSS/IMU (differential) PPP | |
| Maritime | 17 December 2020 | 2 h | TF (phase differential) SPP (code only) | PPP |
| Equipment | Description |
|---|---|
| 1 × Litton LN-200 (Northrop Grumman, Falls Church, VA, USA) | FOG Inertial Measurement Unit (IMU) |
| 1 × FCUP datalogger (FCUP, Porto, Portugal) | LN200 datalogger with 1PPS from GPS |
| 1 × AEROcontrol POS system (IGI mbH, Kreuztal, Germany) | GPS/IMU system (Novatel OEM4/OEMV GPS L1/L2 receiver + FOG IMU)—airplane own system |
| 1 × GPS L1/L2 Antenna (Sensor Systems Inc., Chatsworth, CA, USA) | GPS antenna S67-1575-96 |
| 1 × Septentrio PolaRx5 (Septentrio, Leuven, Belgium) | Multi-constellation GNSS receiver |
| 1 × GNSS Antenna (AeroAntenna Technology Inc., Chatsworth, CA, USA) | AT1675-381_B AA TSO ANT MF L |
| 1 × 12 V 14 Ah valve regulated lead–acid battery (Shimastu, Tsuen Wan NT, Hong Kong) | LN200 power supply |
| 1 × 12 V 14 Ah valve regulated lead–acid battery ((Shimastu, Tsuen Wan NT, Hong Kong) | Septentrio receiver power supply |
| Equipment | Description |
|---|---|
| 1 × Litton LN-200 (Northrop Grumman, Falls Church, VA, USA) | Inertial system |
| 1 × Hercules encoder H35T-142P-FU1024 (Hercules, WI, USA) | Odometer |
| 2 × Trimble (Trimble, Sunnyvale, CA, USA) | GPS receiver |
| 2 × Trimble Zephyr (Trimble, Sunnyvale, CA, USA) | GPS antenna |
| 1 × Septentrio AsteRx-U (Septentrio, Leuven, Belgium) | Multi-constellation GNSS receiver |
| 1 × Septentrio PolaNT-X MF (Septentrio, Leuven, Belgium) | GNSS antenna |
| 1 × 12 V 15,600 mAh power supply (XTPower, China) | Septentrio receiver power supply |
| 1 × 12 V 60 Ah Lead-acid battery (Varta, Hannover, Germany) | Applanix POS/LV power supply |
| Equipment | Description |
|---|---|
| 1 × Advantech UNO-3283G (Advantech, Taipei, Taiwan) | Computer |
| 2 × AsteRx-U (Septentrio, Leuven, Belgium) | Multi-constellation, dual antenna GNSS receiver |
| 2 × 12 V 6 Ah Power supply (Mean Well Enterprises Co., LTD., New Taipei City, Taiwan) | Power supply |
| 2 × 12 V 2 Ah Lead-acid battery (GS YUASA Battery Germany GmbH, Krefeld, Germany) | Power backup |
| 1 × PolaNt Choke Ring B3/E6 * (Septentrio, Leuven, Belgium) | GNSS antenna |
| 2 × PolaNt-x MF ** (Septentrio, Leuven, Belgium) | GNSS antenna |
| Galileo | GPS | Galileo+GPS | ||||
|---|---|---|---|---|---|---|
| Campaign | PDOP | No SV | PDOP | No SV | PDOP | No SV |
| Q2 2019 | 1.5 | 11 | 1.5 | 13 | 0.9 | 23 |
| Q3 2019 | 1.8 | 10 | 1.6 | 10 | 1 | 19 |
| Q3 2020 | 1.8 | 9 | 1.6 | 9 | 1 | 18 |
| Q4 2020 | 1.5 | 10 | 1.4 | 9 | 1 | 19 |
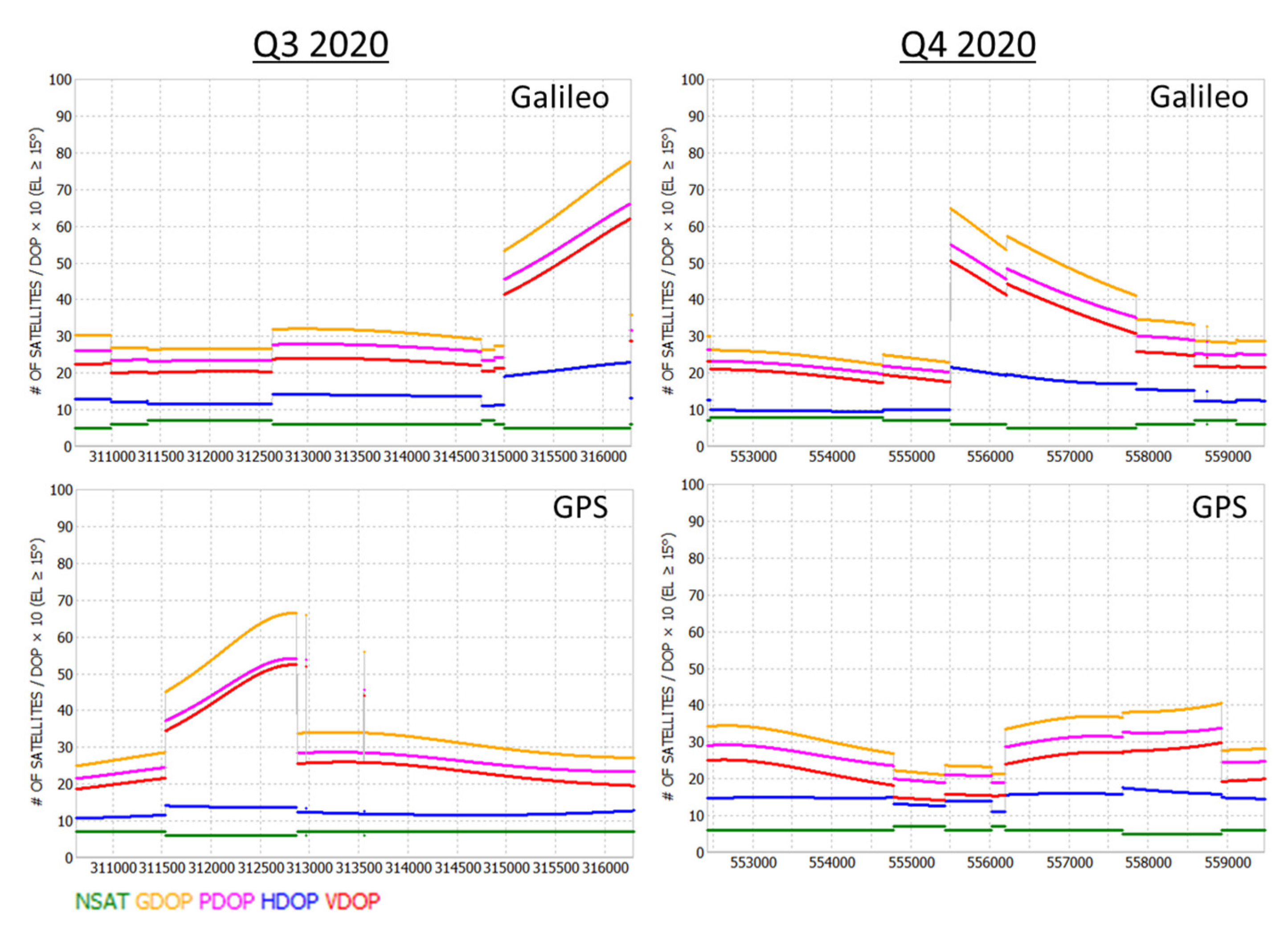
| Galileo | GPS | Galileo+GPS | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Campaign | PDOP | No SV | PDOP | No SV | PDOP | No SV | ||||||
| U | E | U | E | U | E | U | E | U | E | U | E | |
| Q2 2019 | 2.42 | 3.55 | 6 | 5 | 3.21 | 2.15 | 8 | 11 | 2.39 | 1.68 | 14 | 16 |
| Q3 2019 | 2.73 | 2.93 | 5 | 6 | 2.21 | 1.62 | 11 | 11 | 2.08 | 1.28 | 16 | 16 |
| Q3 2020 | 3.19 | 2.19 | 6 | 6 | 2.67 | 1.95 | 9 | 9 | 2.37 | 1.28 | 15 | 15 |
| Q4 2020 | 2.31 | 2.23 | 6 | 6 | 2.88 | 2.35 | 8 | 8 | 2.36 | 1.47 | 14 | 14 |
| Galileo | GPS | Galileo+GPS | ||||
|---|---|---|---|---|---|---|
| Campaign | PDOP | No SV | PDOP | No SV | PDOP | No SV |
| Q2 2019 | 3 | 5 | 2.1 | 8 | 1.5 | 13 |
| Q3 2019 | 4.5 | 7 | 1.9 | 10 | 1.4 | 16 |
| Q3 2020 | 3.2 | 6 | 1.9 | 10 | 1.3 | 16 |
| Q4 2020 | 4.4 | 6 | 1.7 | 11 | 1.4 | 17 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bastos, L.; Buist, P.; Cefalo, R.; Goncalves, J.A.; Ivan, A.; Magalhaes, A.; Pandele, A.; Porretta, M.; Radutu, A.; Sluga, T.; et al. Kinematic Galileo and GPS Performances in Aerial, Terrestrial, and Maritime Environments. Remote Sens. 2022, 14, 3414. https://doi.org/10.3390/rs14143414
Bastos L, Buist P, Cefalo R, Goncalves JA, Ivan A, Magalhaes A, Pandele A, Porretta M, Radutu A, Sluga T, et al. Kinematic Galileo and GPS Performances in Aerial, Terrestrial, and Maritime Environments. Remote Sensing. 2022; 14(14):3414. https://doi.org/10.3390/rs14143414
Chicago/Turabian StyleBastos, Luisa, Peter Buist, Raffaela Cefalo, Jose Alberto Goncalves, Antonia Ivan, Americo Magalhaes, Alexandru Pandele, Marco Porretta, Alina Radutu, Tatiana Sluga, and et al. 2022. "Kinematic Galileo and GPS Performances in Aerial, Terrestrial, and Maritime Environments" Remote Sensing 14, no. 14: 3414. https://doi.org/10.3390/rs14143414