1. Introduction
Point-like source parameter estimation is one of the most important techniques in the array signal processing community, and it has been widely used in radar, seismic exploration, sonar, and many other fields [
1,
2,
3,
4,
5]. A large number of methods has been developed to estimate parameters, especially in array radars [
6,
7,
8,
9]. In [
10], a two-dimensional (2D) multiple-signal classification (MUSIC) method was proposed to estimate the azimuth and elevation angles of a planar array. However, there were disadvantageous that it suffered from the high computational load due to a 2D spectral peak searching. In [
11], a two-stage MUSIC algorithm on a fourth-order cumulant (FOC) was developed in order to estimate spatial angles and localize mixed sources. At the expense of tremendous data samples, two-dimensional search and pairing parameters were avoided by the resultant algorithm, in addition, the estimation failure problem and alleviated aperture loss did not happen. Besides this, a method was developed by combining the estimation of the signal parameters via the rotational invariance techniques (ESPRIT) method and an FOC matrix in [
12], where multi-dimensional parameter pair matching can be realized via the construction of the high-dimensional FOC matrix. The direction-of-arrival (DOA) of a nonuniform nested array was studied in [
13], where the gain-phase error estimation was obtained by properly choosing the elements of the FOC matrix. In [
14], several special FOC matrices were constructed to investigate the problem of mixed-source localization using a linear electromagnetic vector sensor (EVS) array with gain/phase uncertainties. Compared to the existing methods, it provided a satisfactory parameter estimation performance under unknown phase/gain responses, and does not impose a restriction on EVS placement. In order to localize mixed sources, several special FOC matrices were also constructed using a linear tripole (i.e., defective EVS (D-EVS)) array in [
15]. It estimated both the spatial and polarization information of mixed sources; it provided improved accuracy without any spectral search, and realized a more reasonable classification of the signal types. These methods developed for spatial and polarization angle estimation are based on the FOC matrix; it is useful for the achievement of the 3-D localization of near-field (NF) sources, as well as the accurate estimation of the spatial and polarization parameters.
Moreover, the signal processing in a polarimetric array is an important topic in the electric and magnetic fields, where the polarimetric information can improve the performance of radar estimation [
16,
17,
18]. The polarimetric array consists of EVS or D-EVS, where the D-EVS have more freedom in the spatial and polarization domains, and the mutual coupling among sensors is reduced. Besides this, the polarimetric information of D-EVS can also be utilized fully, and the computational load can be decreased to a greater degree than that for EVS. In [
19], an improved method to estimate DOA and polarization angles was proposed based on D-EVS, where the polarimetric scale size and the computational complexity can be effectively decreased. The estimation of the DOA and polarization angles with a sparse collocated loop and dipole cross array was studied in [
20], in which the ambiguities were resolved by the virtual baseline method, and the DOA estimation was acquired with high precision. In [
21], a rapid DOA estimation method was developed based on the sparsely stretched L-shaped array with D-EVS, where the element spacing was greater than half the wavelength, and array aperture was effectively improved. Based on the a second-order statistics, two methods have proposed to estimate parameters of NF polarized sources using D-EVS array, where a sparse linear array was employed in [
22] and an array of cross-dipoles was studied in [
23]. A spatial amplitude ratio based algorithm and a noncircularity based algorithm were presented in [
24,
25], respectively, and effective for 2D NF polarized sources localization by utilizing the linear cocentered orthogonal loop and dipole array. While above methods in [
19,
20,
21,
22,
23,
24,
25] are only effective for 1D DOA of uniform linear array (ULA) or 2D DOA of L-shaped/planar array sources localization, and fail to work 2D DOA estimation of ULA sources scenario.
Based on the above analysis, a novel polarimetric array with D-EVS is presented in this paper for multi-dimensional parameter estimation in a polarimetric ULA (P-ULA) with cross-distribution dipole pairs. In order to estimate the parameters, including the elevation angle, azimuth angle, polarization auxiliary angle, polarization phase difference, frequency and range of the NF sources, methods were designed as follows: Firstly, the polarization auxiliary angle and polarization phase difference, as well as the elevation angle and azimuth angle, are estimated based on the construction of the FOC matrix. Then, a decoupling method is developed to obtain the azimuth and elevation angles using the fixed phase difference in the spatial and polarization domains among the different subarrays. Subsequently, the frequency and range are estimated by re-applying the FOC matrix in each subarray. The parameter pair matching method is performed in order to match the pairs.
At the analysis stage, the Cramér-Rao Bound (CRB) for the elevation angle, azimuth angle, polarization auxiliary angle, polarization phase difference, frequency and range estimations are derived. Moreover, in order to investigate the performance of the proposed method, the root mean square error (RMSE) versus the input signal-to-noise ratio (SNR) and snapshots are analyzed in the environment of additive white gaussian noise (AWGN). In addition, comparisons between the proposed method, a method of multiple-input multiple-output radar using the electromagnetic vector sensors (EVS-MIMO) [
26], are also given.
The paper is organized as follows.
Section 2 presents the signal model of the P-ULA with cross-distribution dipole pairs. In
Section 3, the problem of multi-dimensional parameter estimation is formulated and the methods to estimate the multi-dimensional parameters are introduced. The simulation experiment results are given in
Section 4, and the performance discussion is addressed in
Section 5. Finally, conclusions and possible future research are discussed in
Section 6.
Regarding notation, boldface is used for vectors (upper case) whose entry is , vectors (upper case) whose entry is , vectors (upper case) whose entry is , and matrices (upper case) whose entry is , . The transpose, the conjugate, and the conjugate transpose operators are denoted by the symbols , and , respectively. The and represent the Hadamard (element-wise) product and the Kronecker product, respectively. The indicates a closed interval of with , denotes its Euclidian norm. For any complex number , are used to denote the modulus of . Finally, indicates the diagonal matrix whose diagonal element is the entry of . The represents the diagonal element of a matrix. , and denote, respectively, the identity matrix, the matrix with zero entries, and the vector with all elements being one (their size is determined from the context).
2. Received Signal Model
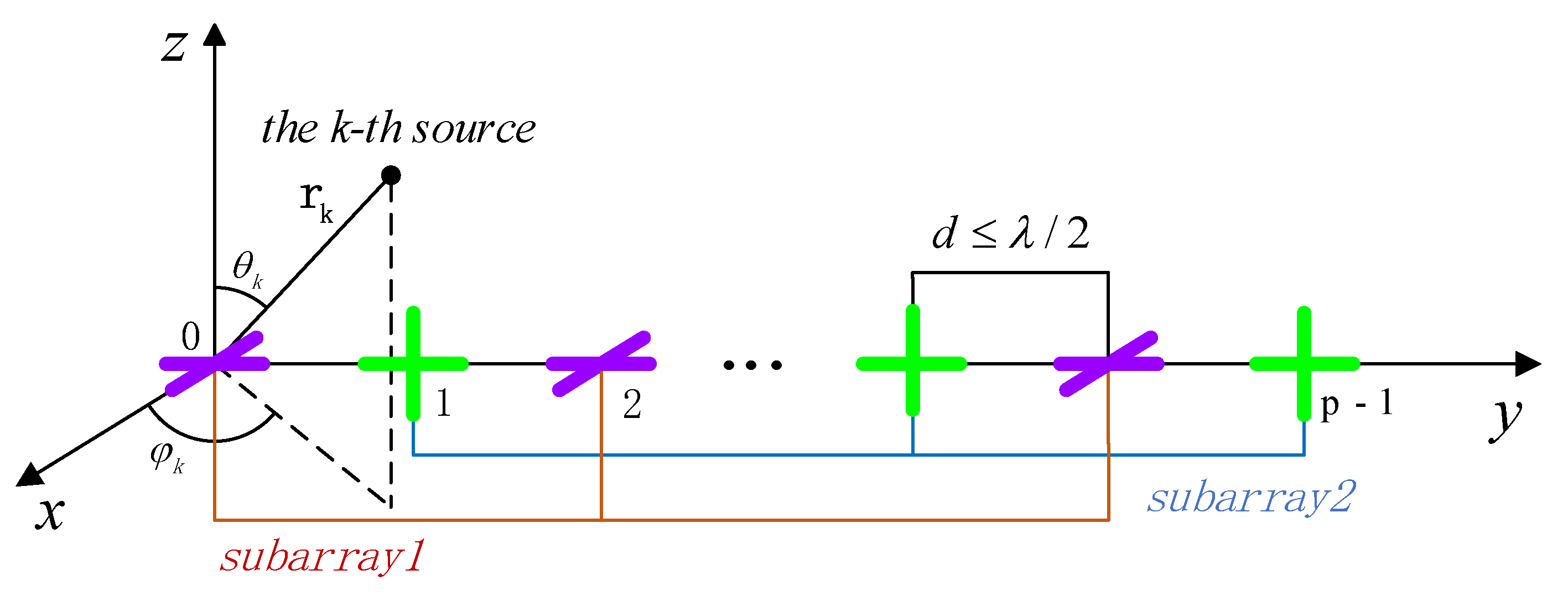
As shown in
Figure 1, for the NF scenario in P-ULA with cross-distribution dipole pairs, let us assume a P-ULA with
dipole pairs, where each dipole pair is composed of two identical electrically short dipoles which are orthogonally oriented. Furthermore, all of the dipole pairs are located in the
y-axis with the spacing
, and the cross-distributed dipole pairs are alternately placed in the xoy plane and the yoz plane, respectively. To this end, the P-ULA with cross-distribution dipole pairs is divided into two subarrays, where subarray 1 consists of all of the dipole pairs placed in the xoy plane, while the dipole pairs placed in the yoz plane are gathered in subarray 2.
Consider
NF independent signal sources, where the elevation angle, azimuth angle, polarization auxiliary angle and polarization phase difference of the
source are represented as
,
,
, and
, respectively, with
,
,
, and
, respectively. Besides this, the frequency and range of the
source are denoted as
and
, respectively. Then, the received signal model can be derived as
where
denotes the received signal matrix,
represents the steering vector, and
and
are the steering vectors of subarray 1 and subarray 2, respectively, which has the form of
denotes the signal waveform matrix, and
represents AGWN. In particular, the signal received in the
dipole pairs is written as
where
is the
signal with the complex echo amplitude
,
denotes the
received signal, and
indicates the steering vectors of
source, which can be represented as
where
with
,
represents the propagation delay of the
source with
,
, and the wavelength
.
Moreover, the electrical field component induced by the
dipole pairs is
where
and
represent the spatial angular location matrices of the
signal for subarray 1 and subarray 2, respectively, which are written respectively as
represents the
vector of the polarization vector in each subarray, which is expressed as
Note that some assumptions in this paper are listed as follows. The source signals are statistically independent as zero-mean random processes with nonzero kurtosis distribution. is AGWN with the positive definite covariance matrix. For different sources, the phase parameters are independent, i.e., and for . The form of the received data in each vector sensor is the same, and the spacing of element and the number of sources are known or accurately estimated by theoretical information criteria.
3. Joint Parameter Estimation Method
This section deals with the parameter estimation of the NF sources, including the elevation angle, azimuth angle, polarization auxiliary angle, polarization phase difference, frequency and range. Firstly, the elevation angle, azimuth angle, polarization auxiliary angle and polarization phase difference of the sources are estimated based on the FOC matrix in each subarray. Then, a decoupling method is developed to obtain the azimuth and elevation angles using the fixed phase difference in the spatial and polarization domains among the different subarrays. Subsequently, the frequency and range are estimated by re-applying the FOC matrix. Finally, the parameter pair matching method is performed in order to match the pairs.
3.1. Polarization Angle Estimation of the Subarray
Based on the principle of FOC [
15] and the above assumptions, the cumulant matrix at the
dipole pair of each subarray can be defined as
where
,
and
denote the
and
dipoles of the
dipole pairs in subarray 1, respectively, and
and
represent the
and
dipole of the
dipole pairs in subarray 1, respectively.
with
denote
dipole or
dipole, and
is the same, with
representing the location of the dipole pairs in subarray 1.
Then, the subspace theory can be implemented using the signal subspace matrix
, where the eigen-decomposition
in (10), i.e.,
where
denotes an invertible matrix. Let us first consider the case without noise. Hence, a unique
non-singular matrix exists, such that
. In particular,
represents a block matrix of
with elements from the
row to the
row. The
is similar to
, and
. Consequently, the
can be expressed as
where
, and
denotes a selection matrix with
, which is a
row vector (where the
dipole is
and the others are
in
). Furthermore, as
and
are full-rank matrices, a unique non-singular
matrix
exists, such that
In (14),
and
indicate the eigenvalues and the right eigenvectors of
, respectively. Note that the eigenvalues of
correspond to the diagonal elements of
, which has the form of
where
and
denote the
row of
and the
row of
, respectively.
Accordingly, the
source polarization auxiliary angle and polarization phase difference estimation at the
dipole pairs can be derived as
Similarly, the estimation of the
source polarization auxiliary angle and polarization phase difference at the
dipole pairs can be obtained, the FOC matrix is designed as follows:
where
is similar to
, and
Then, based on the subspace theory and the above procedure, the estimation of and can be obtained at subarray 1. Refer to the above derivation process, polarization auxiliary angle and polarization phase difference estimation at , the dipole pairs are ,, and of the source at subarray 2.
As a consequence, the polarization auxiliary angle and polarization phase difference estimation at the P-ULA with cross-distribution dipole pairs can be given by
By constructing the FOC matrix, the estimation of
,
and
can be derived. Moreover, the estimations of the subarray procedure are synthetically reported (Algorithm 1).
| Algorithm 1: Polarization angle estimation of the subarray procedure. |
Input:,,,,,,.
Output: A solution to, , .
Initialization: , , , , .
repeat (optimization for initial search parameter given by , ).
1. Construct using (8);
2. Compute , and using (12)–(15);
3. Evaluate , , using (16)–(18);
4. Repeat 1–3, evaluate for subarray 2;
5. Determine , using (21)–(22). |
3.2. Decoupling Method of the Elevation and Azimuth
In this subsection, the mutual coupling effect across the P-ULA with cross-distribution dipole pairs is considered, and a decoupling method of the elevation and azimuth is developed in order to further improve the parameter estimation accuracy. The mutual coupling effect of the existing collocated vector sensor array contains two parts, among the elements and between the internal polarization antennas of collocated dipole pairs. The mutual coupling effect emerges when the element spacing
. As shown in
Figure 1, the polarization antennas of subarray 1 are x-1 and y-1, and those of subarray 2 are y-2 and z-2. The mutual coupling effect of the spatial field and polarization field is produced by x-1 and y-2, x-1 and z-2, and y-1 and z-2. The mutual coupling effect of the spatial field appears by y-1 and y-2. For the internal polarization antennas of collocated dipole pairs, the mutual coupling effect of the polarization field arises by x-1 and y-1, and y-2 and z-2. The array’s scalability is decreased, complexity and computation of the parameter estimation algorithm are increased due to the mutual coupling effect of the array. Thus, a decoupling method is a significant step in parameter estimation.
Consider that
is included in propagation delay
and
. The elevation angle and azimuth angle can only be estimated in quadrant 1/2 or 3/4, and they generate a set of cyclical coupling [
27]. In
Figure 1,
is the array manifold matrix,
is the
x-axis dipole of subarray 1,
is the
y-axis dipole of subarray 1,
is the
z-axis dipole of subarray 2, and
is the
y-axis dipole of subarray 2.
According to the principle of the ESPRIT algorithm [
28], there is a fixed phase difference among the different subarrays, which can be expressed as
where
represents the phase difference of the spatial field and polarization field between the
x-axis dipole of subarray 1 and the
z-axis dipole of subarray 2.
denotes the phase difference of the polarization field between the
y-axis dipole and the
z-axis dipole of subarray 2.
Elements on the diagonal are
, which represents the spatial phase difference of the
signal between the
y-axis dipole of subarray 1 and the
y-axis dipole of subarray 2. Diagonal elements can be represented as
In order to process Equation (25),
can be obtained as follows:
In this case, needs to be decoupled in order to judge the quadrant of azimuth angle according to the positive or negative of , and . Then, is calculated and is determined. Therefore, discuss the following four assumptions.
Assumption 1,
is in the first quadrant:
Assumption 2,
is in the second quadrant:
Assumption 3,
is in the third quadrant:
Assumption 4,
is in the fourth quadrant:
As a consequence, the elevation angle and azimuth angle estimation are given as follows:
The source angles can be estimated by two diagonal matrices, and .
Hence, refer to the derivation process of the decoupling method, the NF source angles estimation of the subarray are obtained as
,
,
and
. Therefore, the elevation and azimuth angles estimation of the NF sources can be given by
According to
Section 3.1,
generated a set of cyclical coupling in the elevation angle and azimuth angle. While in this subsection, the decoupling method of the elevation and azimuth angles is applied to obtain
and
. The estimation steps in the decoupling method are shown as follows (Algorithm 2).
| Algorithm 2: Decoupling of elevation and azimuth angles. |
Input:,,,.
Output: A solution to,.
Initialization: , , .
repeat (optimization for initial search parameter given by , ).
1. Obtain the fixed phase difference between different subarrays using (23)–(24);
2. Compute two diagonal matrices and using (25);
3. Judge quadrant of azimuth angle, then determine elevation angle;
4. Evaluate , using (31)–(34). |
3.3. Estimation Frequency and Range of Sources
Based on the received signal model and the FOC matrix, the following cumulant of subarray 1 can be constructed:
where
,
and
are similar to
Section 3.1, and the FOC matrices include
where
, and the FOC matrix is a full-rank matrix. Compute the rotation invariant matrices
,
and
as follows:
Hence, the relative of matrices can be defined as
,
and
, where
Then, the relationship of the FOC matrices can be represented as
where the diagonal element
is the eigenvalue of matrix
, and the
column vector
of the array manifold
is the eigenvector corresponding to the eigenvalue.
The eigen-decompositions of the matrices , and are managed, then, eigenvalues are obtained, and parameters can be given. The rank order of , and is different, while the eigenvectors of the matrices are the same. Therefore, it is necessary to know the pairing relationship among the feature vectors, and to estimate each parameter.
The eigenvector matrices are obtained by the eigen-decomposition, the eigenvalue matrices are
,
and
. The pairing method is as follows: based on the matrix
, the constructed eigenvectors of the matrix
,
are aligned with the matrix
, matching the corresponding eigenvalues one by one. The eigenvalues are
,
and
, the eigenvectors are
,
and
. The pairing of the eigenvalue matrices is realized as
The NF source parameter estimation of subarray 1 is derived as follows:
Repeat the above steps, the cumulant of subarray 2 can be constructed as
Refer to the derivation process of subarray 1, the NF source parameter estimation and of subarray 2 is obtained.
According to our hypothesis, the parameters of multiple sources are different. Subarray 2 of the source parameters can be matched with subarray 1, as follows:
Therefore, the frequency and range estimation of the NF sources can be given as
In this subsection, the FOC matrix is re-applied, the matrices , and eigen-decomposition are implemented, and the , of the source is estimated.
Regarding parameters pair matching, note that the elevation angle and azimuth angle of the source at the dipole pairs and the dipole pairs of the array center reference point are distinct, while the source polarization auxiliary angle and the polarization phase difference at the two dipole pairs are approximately equal. This fact can be directly utilized to match pairs, i.e., and , and , and , and , and , and .
Moreover, several independent eigen-decompositions are performed, which will cause a mismatch of eigenvalues. In order to avoid this problem, the method in [
29] can be employed. In
Section 3.1,
Section 3.2 and
Section 3.3, each of the dipole pairs produce estimation errors. Thus, it must be summed coherently for the received signal, and must be enhanced. In more detail, Algorithm 3 is performed.
| Algorithm 3: Frequency and range estimation of the subarray procedure. |
Input
Output: A solution to
Initialization:
repeat (optimization for initial search parameter given by ).
1. Construct
using (35);
2. Compute the rotation invariant matrices
using (37);
3. Obtain pairing of eigenvalue matrices
using (40);
4. Evaluate
using (41)–(42);
5. Repeat 1–4, evaluate for subarray 2;
6. Determine
using (45)–(46);
7. Parameter pair matching. |
4. Experimental Results
In this section, numerical examples are provided to assess the performance of the proposed algorithm in order to estimate the target elevation angle, azimuth angle, polarization auxiliary angle, polarization phase difference, frequency and range of arrival with reference to a P-ULA with a cross-distribution dipole pair-sensing system. The simulation results are compared with the EVS-MIMO algorithm [
26]. Resorting to the Monte Carlo technique, the performance of the proposed method is evaluated for the elevation angle, azimuth angle, polarization auxiliary angle, polarization phase difference, frequency and range estimations. As a figure of merit, the RMSE is considered, which is computed as
where the estimation
is provided by
, and
denotes the number of Monte Carlo independent trials. The performance is measured by the RMSE of 500 independent Monte Carlo runs. In the following simulations, the P-ULA with cross-distribution dipole pairs is composed of dipole pairs
and sources
, whereas the element spacing among the dipole pairs is set as
. Finally, the CRBs for the elevation angle, azimuth angle, polarization auxiliary angle, polarization phase difference, frequency and range estimations are used as performance benchmarks. The values of the signal parameters involved in the analyzed case studies are listed in
Table 1.
4.1. RMSE Analysis with Respect to Different Input SNRs
In the first experiment, the influence of the SNR is considered in the EVS-MIMO, the proposed model, and CRB. The result of the RMSE versus the SNR is drawn in
Figure 2, which illustrates the RMSE versus the SNR for two case studies, assuming different values of the true elevation angle, azimuth angle, polarization auxiliary angle, polarization phase difference, frequency and range of the target. In particular, in
Figure 2, the RMSE of the parameter estimation for NF sources with respect to different input SNRs: (a) elevation angle, (b) azimuth angle, (c) polarization auxiliary angle, (d) polarization phase difference, (e) range, and (f) frequency. The signals are
and
, noise is AWGN, snapshots are 1000,
with intervals of
.
The inspection of the curves shows that the higher the SNR the lower the RMSE of P-ULA with cross-distribution dipole pairs and EVS-MIMO estimators. Besides this, the proposed method has obvious advantages over EVS-MIMO, and the estimation accuracy is improved by an order of magnitude when the SNR is sufficiently high, for all of the considered scenarios. Specifically, the elevation angle, azimuth angle, polarization auxiliary angle, polarization phase difference, range and frequency estimates provided by proposed signal-1 are very close to their true values. Similar results hold for proposed signal-2, with the RMSE curves almost overlapping, especially for the high-SNR regime, with those pertaining to ESPIRIT technique. Furthermore, at a low SNR, smaller RMSE values than the CRB benchmark in
Appendix A are observed, indicating that all of the proposed signals exhibit a bias under this SNR regime due to an upper bound to the RMSE induced by the enforced constraint.
In order to shed further light on performance of the different parameter estimations,
Figure 2 displays the bias of the estimators for the elevation angle, azimuth angle, polarization auxiliary angle, polarization phase difference, range, and frequency. The curves corresponding to the CRBs are also reported for comparison. The simulation of
Figure 2b–f assumes the same noise environment as that in
Figure 2a. The results reveal that the P-ULA with cross-distribution dipole pairs (or equivalently, the proposed method), as well as EVS-MIMO, exhibit a bias in the elevation angle, azimuth angle, polarization auxiliary angle, polarization phase difference, range and frequency domains, with a much more marked effect on the range and frequency component. Contrary to our expectations, the bias is not corrected by the decoupling method, i.e., the azimuth angle and elevation angle, thus leading to a performance which is very far from the CRB. On the other hand, despite the decoupling method, a small but noticeable bias persists in both the polarization auxiliary angle and polarization phase difference. There is interference given that P-ULA with cross-distribution dipole pairs is placed alternately on the yoz plane and xoy plane, compared with the same dipole pairs placed in the plane. This has great influence on the parameter estimation accuracy. Therefore, the bias of the simulation experiment analysis confirms that P-ULA with cross-distribution dipole pairs and EVS-MIMO algorithms experience a bias in parameter estimation domains, which is the main reason for the deviations of these estimators from the CRB (at high SNR).
4.2. RMSE Analysis with Respect to Different Input Numbers of Snapshots
In the second experiment, the influence of the snapshot number is considered in the EVS-MIMO, the proposed method, and CRB. The simulation scenario considered in this subsection accounts for the presence of two signals at different snapshot numbers to the target. The RMSE versus the snapshots is displayed in
Figure 3, where in each subfigure different values of the true elevation angle, azimuth angle, polarization auxiliary angle, polarization phase difference, range and frequency of the target are considered. In particular,
Figure 3 shows that the RMSE of the parameter estimation for NF sources with respect to different input snapshot numbers: (a) elevation angle, (b) azimuth angle, (c) polarization auxiliary angle, (d) polarization phase difference, (e) range, and (f) frequency. The signals are
and
, noise is AGWN,
, the snapshot number is 500~3000, and the interval is 500.
The inspection of the curves highlights the fact that the considered estimators exhibit performance behaviors comparable to those obtained in the SNR scenario. In other words, the methods correctly estimate the parameters of a target located without experiencing significant performance degradation due to possible gain/phase uncertainties in the cross-distribution dipole pairs. According to the simulation results, it can be seen that the estimation accuracy of the elevation angle, azimuth angle, polarization auxiliary angle, polarization phase difference, range and frequency is improved with the increase of the snapshot number. The parameters of the signals have higher estimation accuracy when the snapshot number is over 1000. It is seen that the proposed algorithm has obvious advantages over the EVS-MIMO algorithm, which can correctly estimate the parameters of NF sources.
Furthermore, the bias analysis reported in
Figure 3, for
, shows specific differences with respect to the different snapshots case, corroborating the effectiveness of the proposed algorithm regarding the reduction of the bias and thus the improvement of the performance. Due to the fact that the P-ULA with cross-distribution dipole pairs is divided into two subarrays, parameters are estimated according to the relationship between the subarrays, and the element spacing is underutilized. The proposed algorithm achieved similar RMSE levels, with performance very far from to CRB, at snapshots and in the SNR simulation scenario. In other words, the parameter estimation accuracy of the proposed algorithm can be further improved to approach CRB.
5. Performance Discussion
This section, the performances of proposed method are analyzed theoretically, and are compared with EVS-MIMO and MUSIC algorithms regarding their computational complexity. Besides this, analysis on the effectiveness of P-ULA with cross-distribution dipole pairs is given in
Section 5.2, and analysis on the estimation bias and pair matching accuracy is addressed in
Section 5.3.
5.1. Analysis of the Computational Complexity
In this subsection, the assessments of the computational burden involved by the proposed method and the EVS-MIMO method [
26] are provided. The main computational complexity of the methods is as follows.
Regarding P-ULA with cross-distribution dipole pairs, the construction of the FOC matrix
,
and
at (8) and (19) requires
flops. Calculate the
eigen-decomposition in (11) and the
,
and
eigen-decomposition in (38), the computational complexity requires
flops. The estimation of
using (12)–(15) involves
flops.
Section 3.2 shows the decoupling method of the elevation angle, azimuth angle and parameter pair matching, which involves
flops.
Regarding EVS-MIMO, the EVS-MIMO method mainly depends on the computation of the covariance matrix and its eigen-decomposition, 2D DOA estimation, 2D direction-of-departure (DOD) estimation, and DOD-DOA pairing. The computation of the covariance matrix is , and its eigen-decomposition requires . For 2D DOA estimation, , , , and are required for the computation of the matrix operation. Similarly, is required for 2D DOD estimation. Finally, DOD-DOA pairing needs .
In fact, the MUSIC algorithm is also a classical parameter estimation algorithm. Here, we only discuss the computational complexity of the MUSIC algorithm, and do not conduct simulation experiments, due to the large amount of searching process required. The complexity of the 2D vector MUSIC algorithm (if the array is placed as P-ULA with cross-distribution dipole pairs) is a superposition of the complexity of the two scalar MUSIC algorithms. The complexity of the 2D vector MUSIC algorithm is mainly concentrated on the calculation of the covariance matrix, the eigenvalue decomposition, and the 1D search, of which the complexities are , , and , respectively, where , , , , , and denote the searching number of the elevation angle, azimuth angle, polarization auxiliary angle, polarization phase difference, frequency, and range parameter, respectively.
Overall, it is clearly that the computational complexity of the 2D vector MUSIC algorithm as follows .
To summarize,
Table 2 shows the computational complexity of two algorithms, where
represents the element numbers of the array,
denotes the source signal numbers, and
is snapshot numbers. It can be seen that the proposed method not only improves the parameter estimation accuracy but also decrease the computational complexity.
5.2. Analysis of the Effectiveness
In the first experiment, we verify the effectiveness of the proposed algorithm. The signals are
,
s2, and
, noise is AWGN, all of the SNRs are
, and all of the snapshot numbers are 1000. It is worth noting that the proposed algorithm can estimate parameters effectively, the estimated values are near to the true value (as shown in
Figure 4 and
Figure 5). In particular,
Figure 4 shows the planisphere of the azimuth angle and elevation angle,
, snapshot number = 1000,
,
,
.
Figure 5 shows the planisphere of the polarization auxiliary angle and polarization phase difference,
, snapshot number = 1000,
,
,
.
Besides this, for the parameter estimation method of P-ULA with cross-distribution dipole pairs, 2D DOA estimation can be obtained from dipole pairs of the receiving array, and the array satisfies the spatial rotational invariance. The array is divided into two subarrays, where subarray 1 consists of all of the dipole pairs placed in the xoy plane, while the dipole pairs placed in the yoz plane are gathered in subarray 2, which correspond to the signal-subspace matrix . Thus, we can obtain the DOA estimation of the maximum signals.
5.3. Analysis of the Estimation Bias and Pair Matching Accuracy
In the second experiment, we consider the resolution and pair matching accuracy of the proposed algorithm. The signals are
and
, the noise is AGWN, all of the
, and all of the snapshot numbers are 1000. In particular,
Figure 6 shows the estimation bias of the proposed algorithm,
, snapshot number = 1000,
.
Figure 7 shows the pair matching accuracy of the proposed algorithm,
, snapshot number = 1000,
.
The azimuth angle of the two signals is the same, and the elevation angle is different. In
Figure 6, it can be seen that the bias of the polarization phase difference is relatively large. In
Figure 7, the elevation angle of signal
is changed, while signal
is fixed. As a result, if the signal angle difference is greater than
, the signal has high estimation accuracy. Particularly, if signal angle difference is equal or greater than to
, the pair matching accuracy is
.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}