

The Effect of Error Non-Orthogonality on Triple Collocation Analyses

{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- Linear calibration is sufficient to describe the interrelations between the observation systems;
- (2)
- The observation errors are random with zero average after calibration;
- (3)
- The observation errors are independent of the measured value (error orthogonality).
2. Data
3. Methodology
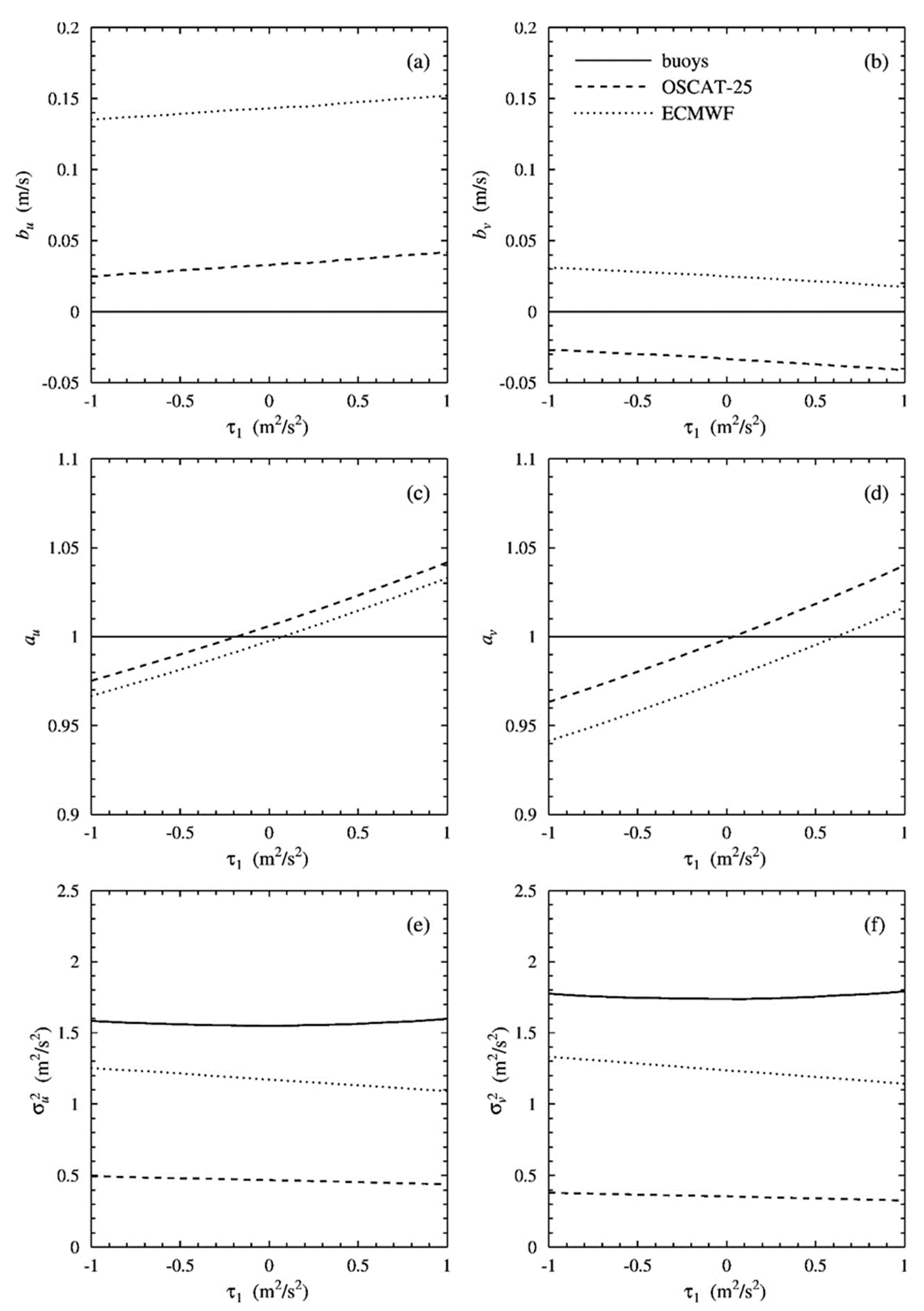
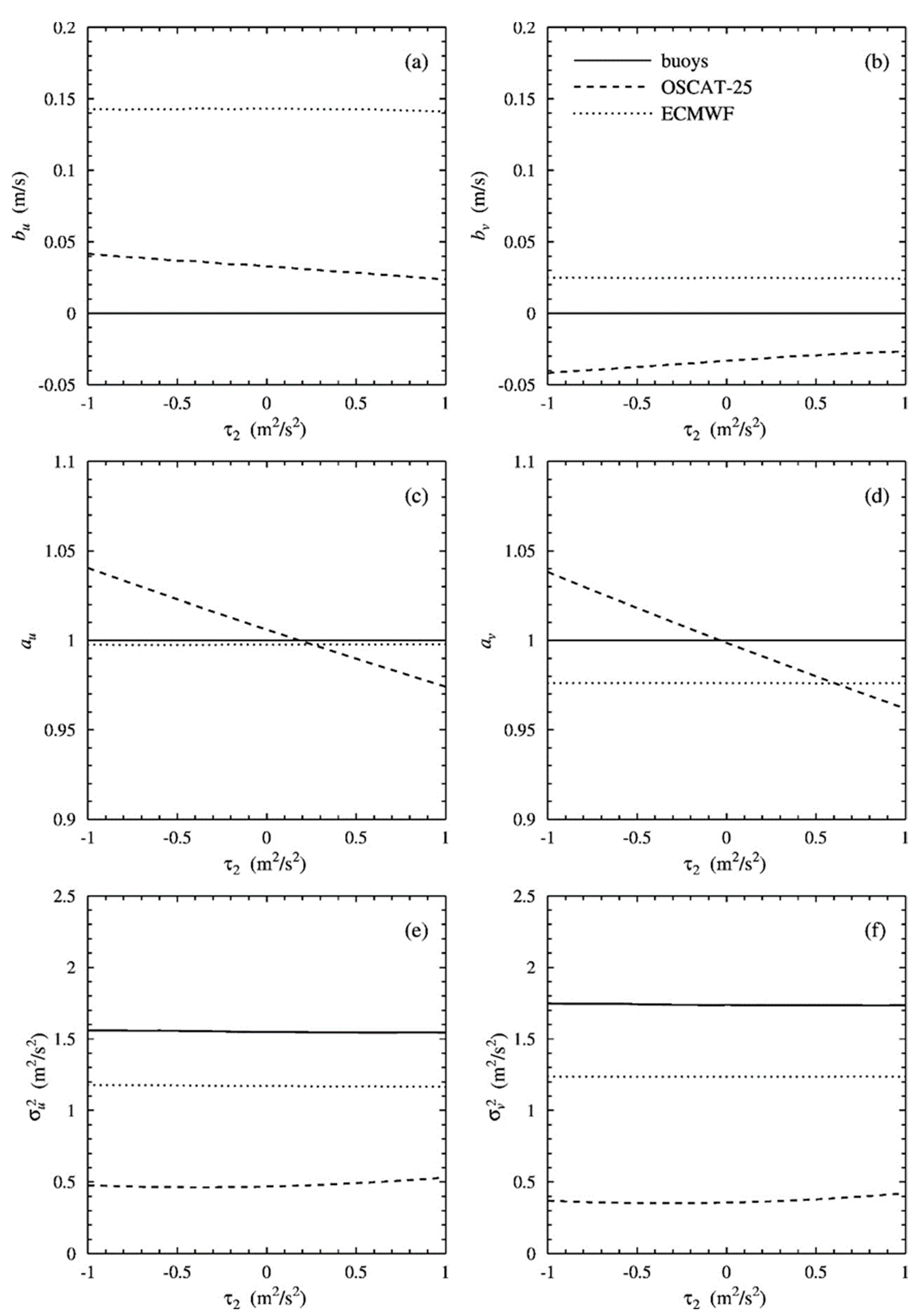
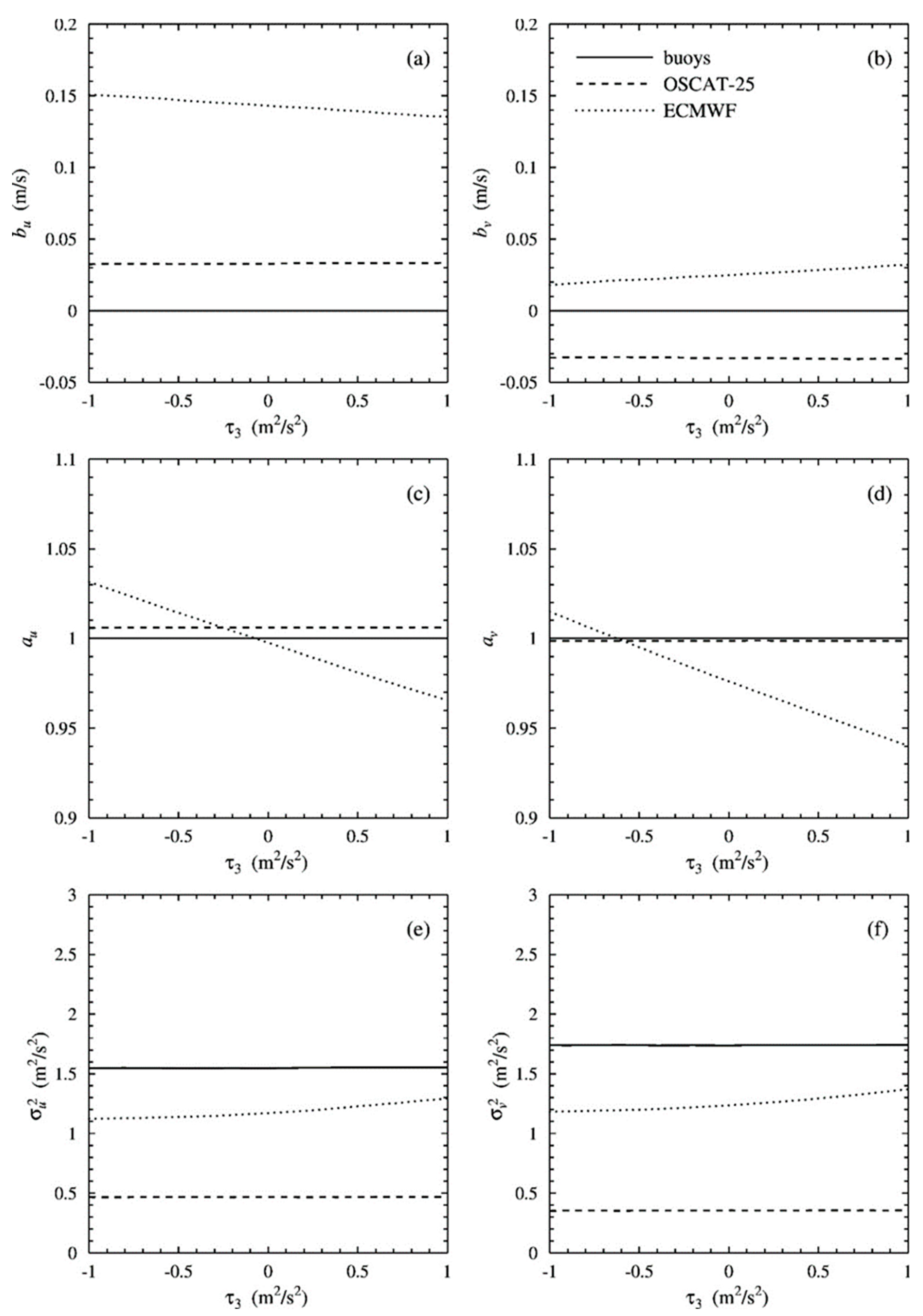
3.1. Triple Collocation with Error Non-Orthogonality
3.2. Representativeness Errors
3.3. Method of Solution
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stoffelen, A. Toward the True Near-surface Wind Speed: Error Modelling and Calibration using Triple Collocation. J. Geophys. Res. 1998, 103, 7755–7766. [Google Scholar] [CrossRef]
- Vogelzang, J.; Stoffelen, A.; Verhoef, A.; Figa-Saldaña, J. On the Quality of High-resolution Scatterometer Winds. J. Geophys. Res. 2011, 116, C10033. [Google Scholar] [CrossRef]
- Abdalla, S.; De Chiara, G. Estimating Random Errors of Scatterometer, Altimeter, and Model Wind Speed Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2406–2414. [Google Scholar] [CrossRef]
- Danielson, R.E.; Johannessen, J.A.; Quartly, G.D.; Rio, M.-H.; Chapron, B.; Collard, F.; Donlon, C. Exploitation of Error Correlation in a Large Analysis Validation: GlobCurrent Case Study. Rem. Sens. Env. 2018, 217, 476–490. [Google Scholar] [CrossRef]
- Hoareau, N.; Portabella, M.; Lin, W.; Ballabrera-Poy, J.; Turiel, A. Error Characterization of Sea Surface Salinity Products using Triple Collocation Analysis. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5160–5168. [Google Scholar] [CrossRef]
- Roebeling, R.A.; Wolters, E.L.A.; Meirink, J.F.; Leijnse, H. Triple Collocation of Summer Precipitation Retrievals from SEVIRI over Europe with Gridded Rain Gauge and Weather Radar Data. J. Hydrometeorol. 2012, 13, 1552–1566. [Google Scholar] [CrossRef]
- Wild, A.; Chua, Z.-W.; Kuleshov, Y. Triple Collocation Analysis of Satellite Precipitation Estimates over Australia. Remote Sens. 2022, 14, 2724. [Google Scholar] [CrossRef]
- Gruber, A.; Su, C.-H.; Crow, W.T.; Zwieback, S.; Dorigo, W.A.; Wagner, W. Estimating Error Cross-correlations in Soil Moisture Data Sets using Extended Collocation Analysis. J. Geophys. Res. Atmos. 2016, 121, 1208–1219. [Google Scholar] [CrossRef]
- Fan, X.; Lu, Y.; Liu, Y.; Li, T.; Xun, S.; Zhao, X. Validation of Multiple Soil Moisture Products over an Intensive Agricultural Region: Overall Accuracy and Diverse Responses to Precipitation and Irrigation Events. Remote Sens. 2022, 14, 3339. [Google Scholar] [CrossRef]
- Su, K.; Zheng, W.; Yin, W.; Hu, L.; Shen, Y. Improving the Accuracy of Groundwater Storage Estimates Based on Groundwater Weighted Fusion Model. Remote Sens. 2022, 14, 202. [Google Scholar] [CrossRef]
- McColl, K.A.; Vogelzang, J.; Konings, A.G.; Entekhabi, D.; Piles, M.; Stoffelen, A. Extended triple collocation: Estimating Errors and Correlation Coefficients with respect to an Unknown Target. Geophys. Res. Lett. 2014, 41, 6229–6236. [Google Scholar] [CrossRef]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 Global Reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Rivas, M.B.; Stoffelen, A. Characterizing ERA-Interim and ERA5 Surface Wind Biases using ASCAT. Ocean Sci. 2019, 15, 831–852. [Google Scholar] [CrossRef]
- Verhoef, A.; Vogelzang, J.; Stoffelen, A. Scientific Validation Report (SVR) for the Ku-band Wind Data Records. In OSI SAF Report SAF/OSI/CDOP3/KNMI/TEC/RP/415; EUMETSAT: Darmstadt, Germany, 2022. [Google Scholar]
- Vogelzang, J.; Stoffelen, A. Quadruple Collocation Analysis of In-situ, Scatterometer, and NWP Winds. J. Geophys. Res. Ocean. 2021, 126, e2021JC017189. [Google Scholar] [CrossRef]
- Vogelzang, J.; King, G.P.; Stoffelen, A. Spatial Variances of Wind Fields and their Relation to Second-order Structure Functions and Spectra. J. Geophys. Res. Ocean. 2015, 120, 1048–1064. [Google Scholar] [CrossRef] [Green Version]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vogelzang, J.; Stoffelen, A.; Verhoef, A. The Effect of Error Non-Orthogonality on Triple Collocation Analyses. Remote Sens. 2022, 14, 4268. https://doi.org/10.3390/rs14174268
Vogelzang J, Stoffelen A, Verhoef A. The Effect of Error Non-Orthogonality on Triple Collocation Analyses. Remote Sensing. 2022; 14(17):4268. https://doi.org/10.3390/rs14174268
Chicago/Turabian StyleVogelzang, Jur, Ad Stoffelen, and Anton Verhoef. 2022. "The Effect of Error Non-Orthogonality on Triple Collocation Analyses" Remote Sensing 14, no. 17: 4268. https://doi.org/10.3390/rs14174268
APA StyleVogelzang, J., Stoffelen, A., & Verhoef, A. (2022). The Effect of Error Non-Orthogonality on Triple Collocation Analyses. Remote Sensing, 14(17), 4268. https://doi.org/10.3390/rs14174268