
Robust MIMO Waveform Design in the Presence of Unknown Mutipath Return

Abstract
:
1. Introduction
1.1. Background
1.2. Related Work
1.3. Motivation and Contributions of This Paper
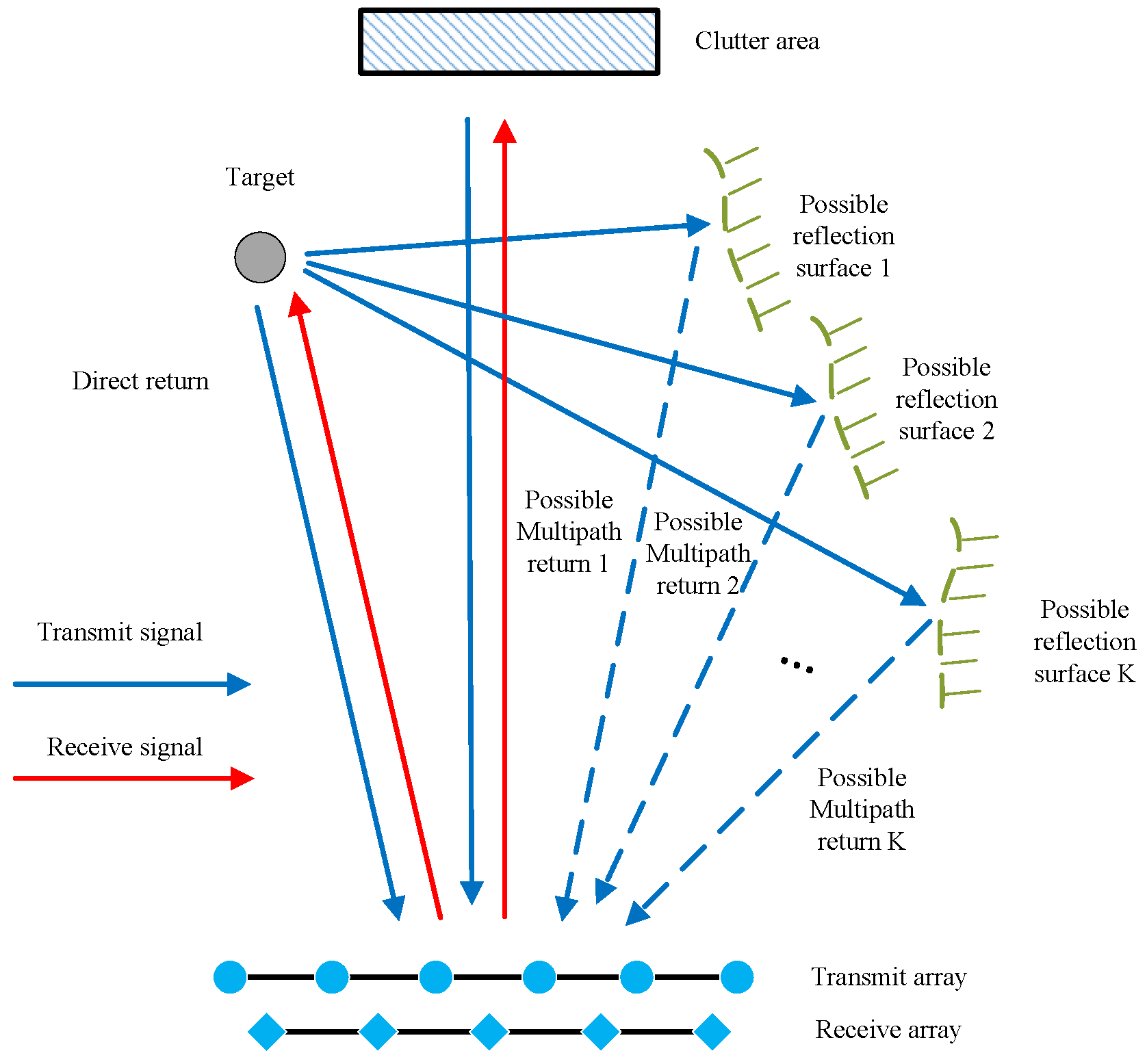
2. Signal Model
2.1. Direct Return Model
2.2. Multipath Return Model
2.3. Disturbance Model
3. Problem Formulation and Proposed Algorithm
3.1. Optimizing Filters with a Fixed Waveform
3.2. Optimizing the Waveform with Fixed Filters
| Algorithm 1 Developed approach. | |
| Input: , , , , , | |
| Step 1., initialize the waveform . | |
| Step 2.. Compute and get the optimized kth filter as . | |
| Step 3. Obtain the optimized waveform by solving a series of SOCP problems | |
| Step 4. Repeat steps 2 and 3 until convergence. | |
| Output Optimized waveform and filters . | |
3.3. Complexity Analysis
4. Simulation Results
4.1. Convergence and Computation Time Analysis
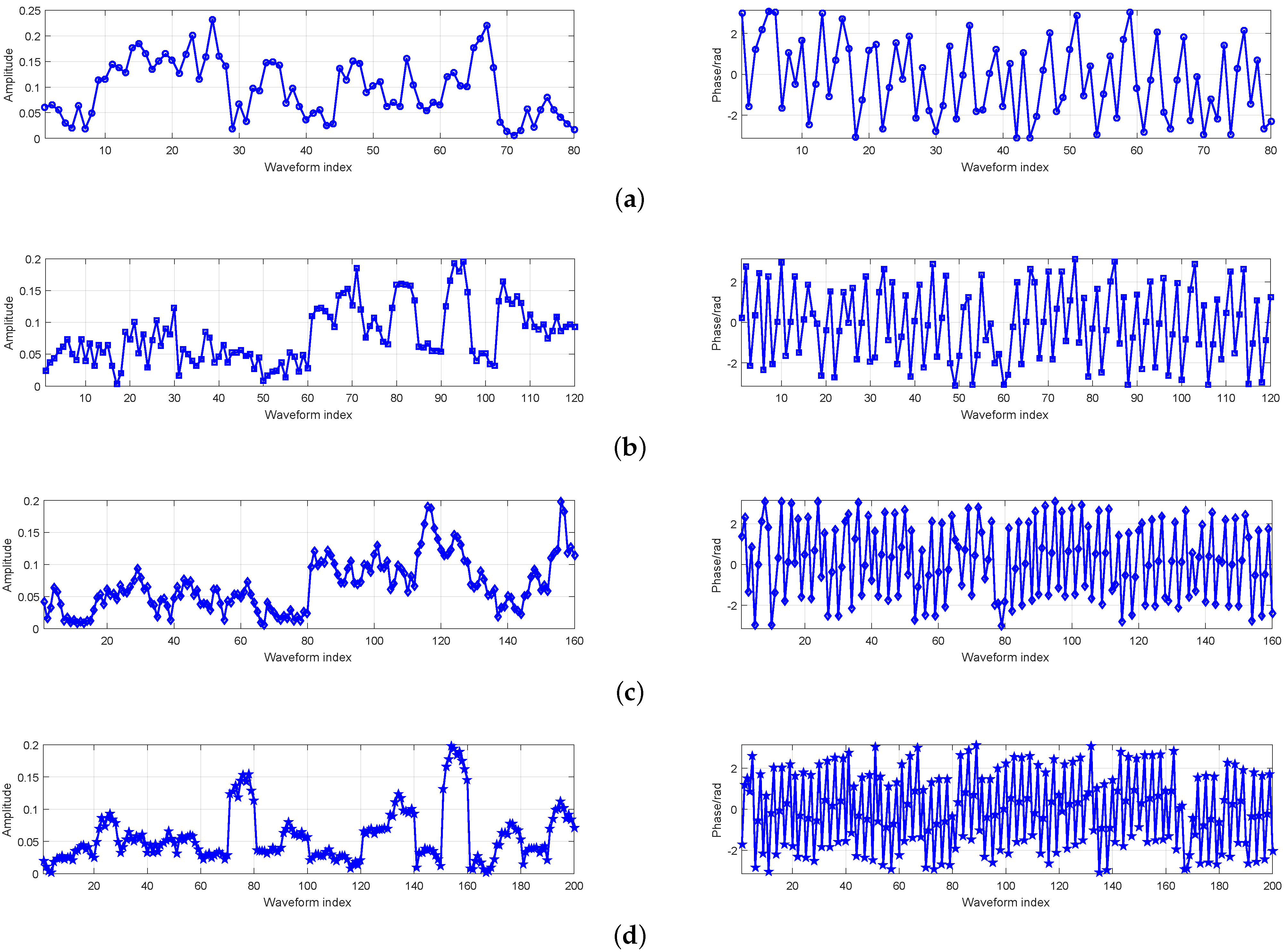
4.2. Robustness of the Developed Design against Different Multipath Returns
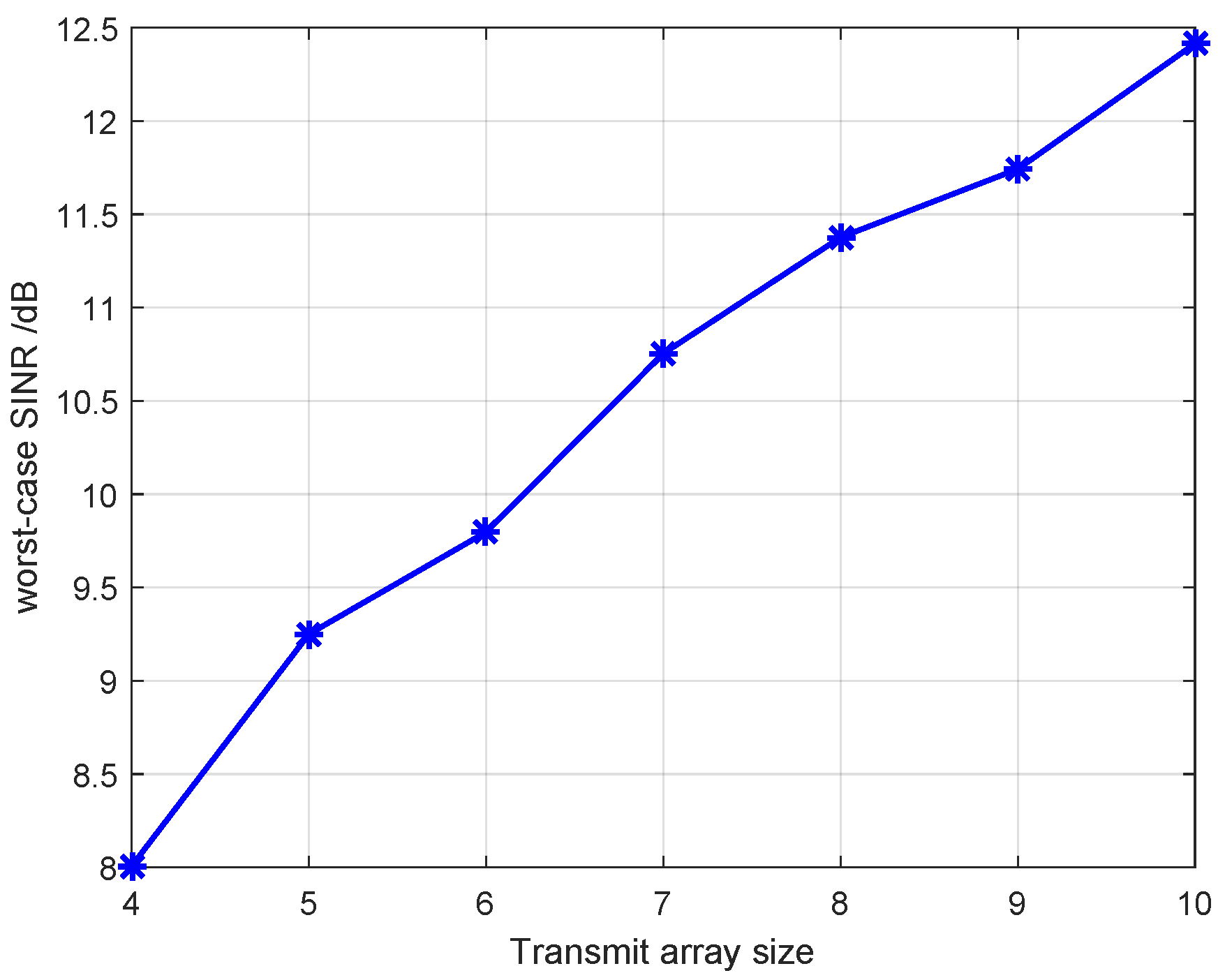
4.3. The Impact of the Transmitting Array Size on the Worst-Case SINR
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhou, K.; Quan, S.; Li, D.; Liu, T.; He, F.; Su, Y. Waveform and filter joint design method for pulse compression sidelobe reduction. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–15. [Google Scholar] [CrossRef]
- Yu, X.; Qiu, H.; Yang, J.; Wei, W.; Cui, G.; Kong, L. Multi-spectrally constrained MIMO radar beampattern design via sequential convex approximation. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 2935–2949. [Google Scholar] [CrossRef]
- Argenti, F.; Facheris, L. Radar pulse compression methods based on nonlinear and quadratic optimization. IEEE Trans. Geosci. Remote Sens. 2020, 59, 3904–3916. [Google Scholar] [CrossRef]
- Yang, J.; Aubry, A.; De Maio, A.; Yu, X.; Cui, G. Design of constant modulus discrete phase radar waveforms subject to multi-spectral constraints. IEEE Signal Process. Lett. 2020, 27, 875–879. [Google Scholar] [CrossRef]
- Raei, E.; Alaee-Kerahroodi, M.; Shankar, M.B. Spatial-and range-ISLR trade-off in MIMO radar via waveform correlation optimization. IEEE Trans. Signal Process. 2021, 69, 3283–3298. [Google Scholar] [CrossRef]
- Jiang, W.; Haimovich, A.M.; Simeone, O. Joint design of radar waveform and detector via end-to-end learning with waveform constraints. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 552–567. [Google Scholar] [CrossRef]
- Liu, Q.; Ren, W.; Hou, K.; Long, T.; Fathy, A.E. Design of Polyphase Sequences with Low Integrated Sidelobe Level for Radars with Spectral Distortion via Majorization-Minimization Framework. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 4110–4126. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P. MIMO radar with colocated antennas. IEEE Signal Process. Mag. 2007, 24, 106–114. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P.; Xu, L.; Roberts, W. On parameter identifiability of MIMO radar. IEEE Signal Process. Lett. 2007, 14, 968–971. [Google Scholar]
- Fishler, E.; Haimovich, A.; Blum, R.; Chizhik, D.; Cimini, L.; Valenzuela, R. MIMO radar: An idea whose time has come. In Proceedings of the 2004 IEEE Radar Conference (IEEE Cat. No. 04CH37509), Philadelphia, PA, USA, 29 April 2004; IEEE: Toulouse, France, 2004; pp. 71–78. [Google Scholar]
- Yang, Y.; Blum, R.S. MIMO radar waveform design based on mutual information and minimum mean-square error estimation. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 330–343. [Google Scholar] [CrossRef]
- He, H.; Stoica, P.; Li, J. Designing unimodular sequence sets with good correlations—Including an application to MIMO radar. IEEE Trans. Signal Process. 2009, 57, 4391–4405. [Google Scholar] [CrossRef]
- Cheng, Z.; He, Z.; Zhang, S.; Li, J. Constant modulus waveform design for MIMO radar transmit beampattern. IEEE Trans. Signal Process. 2017, 65, 4912–4923. [Google Scholar] [CrossRef]
- Cui, G.; Li, H.; Rangaswamy, M. MIMO radar waveform design with constant modulus and similarity constraints. IEEE Trans. Signal Process. 2013, 62, 343–353. [Google Scholar] [CrossRef]
- Tang, B.; Tang, J. Joint design of transmit waveforms and receive filters for MIMO radar space-time adaptive processing. IEEE Trans. Signal Process. 2016, 64, 4707–4722. [Google Scholar] [CrossRef]
- Aldayel, O.; Monga, V.; Rangaswamy, M. Successive QCQP refinement for MIMO radar waveform design under practical constraints. IEEE Trans. Signal Process. 2016, 64, 3760–3774. [Google Scholar] [CrossRef]
- Cheng, Z.; He, Z.; Liao, B.; Fang, M. MIMO radar waveform design with PAPR and similarity constraints. IEEE Trans. Signal Process. 2017, 66, 968–981. [Google Scholar] [CrossRef]
- Naghsh, M.M.; Modarres-Hashemi, M.; Kerahroodi, M.A.; Alian, E.H.M. An information theoretic approach to robust constrained code design for MIMO radars. IEEE Trans. Signal Process. 2017, 65, 3647–3661. [Google Scholar] [CrossRef]
- Yu, X.; Cui, G.; Kong, L.; Li, J.; Gui, G. Constrained waveform design for colocated MIMO radar with uncertain steering matrices. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 356–370. [Google Scholar] [CrossRef]
- Yu, X.; Alhujaili, K.; Cui, G.; Monga, V. MIMO radar waveform design in the presence of multiple targets and practical constraints. IEEE Trans. Signal Process. 2020, 68, 1974–1989. [Google Scholar] [CrossRef]
- Aubry, A.; De Maio, A.; Foglia, G.; Orlando, D. Diffuse multipath exploitation for adaptive radar detection. IEEE Trans. Signal Process. 2015, 63, 1268–1281. [Google Scholar] [CrossRef]
- Rong, Y.; Aubry, A.; De Maio, A.; Tang, M. Diffuse multipath exploitation for adaptive detection of range distributed targets. IEEE Trans. Signal Process. 2020, 68, 1197–1212. [Google Scholar] [CrossRef]
- Richards, M.A. Principles of Modern Radar. Volume I, Basic Principles [Electronic Resource]; Richards, M.A., Scheer, J.A., Holm, W.A., Eds.; SciTech Pub.: Raleigh, NC, USA, 2010. [Google Scholar]
- Fante, R.L.; Torres, J.A. Cancellation of diffuse jammer multipath by an airborne adaptive radar. IEEE Trans. Aerosp. Electron. Syst. 1995, 31, 805–820. [Google Scholar] [CrossRef]
- Sen, S.; Nehorai, A. Adaptive OFDM radar for target detection in multipath scenarios. IEEE Trans. Signal Process. 2010, 59, 78–90. [Google Scholar] [CrossRef]
- Sen, S.; Nehorai, A. OFDM MIMO radar with mutual-information waveform design for low-grazing angle tracking. IEEE Trans. Signal Process. 2010, 58, 3152–3162. [Google Scholar] [CrossRef]
- Xu, Z.; Fan, C.; Huang, X. MIMO radar waveform design for multipath exploitation. IEEE Trans. Signal Process. 2021, 69, 5359–5371. [Google Scholar] [CrossRef]
- Crouzeix, J.P.; Ferland, J.A. Algorithms for generalized fractional programming. Math. Program. 1991, 52, 191–207. [Google Scholar] [CrossRef]
- Aubry, A.; De Maio, A.; Naghsh, M.M. Optimizing radar waveform and Doppler filter bank via generalized fractional programming. IEEE J. Sel. Top. Signal Process. 2015, 9, 1387–1399. [Google Scholar] [CrossRef]
- Tang, B.; Liu, J.; Wang, H.; Hu, Y. Constrained radar waveform design for range profiling. IEEE Trans. Signal Process. 2021, 69, 1924–1937. [Google Scholar] [CrossRef]
- Tang, B.; Li, J. Spectrally constrained MIMO radar waveform design based on mutual information. IEEE Trans. Signal Process. 2018, 67, 821–834. [Google Scholar] [CrossRef]
- Cui, G.; Fu, Y.; Yu, X.; Li, J. Local ambiguity function shaping via unimodular sequence design. IEEE Signal Process. Lett. 2017, 24, 977–981. [Google Scholar] [CrossRef]
- Li, Y.; Vorobyov, S.A.; Koivunen, V. Ambiguity function of the transmit beamspace-based MIMO radar. IEEE Trans. Signal Process. 2015, 63, 4445–4457. [Google Scholar] [CrossRef] [Green Version]
- Arlery, F.; Kassab, R.; Tan, U.; Lehmann, F. Efficient gradient method for locally optimizing the periodic/aperiodic ambiguity function. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; IEEE: Toulouse, France, 2016; pp. 1–6. [Google Scholar]
- Aubry, A.; De Maio, A.; Jiang, B.; Zhang, S. Ambiguity function shaping for cognitive radar via complex quartic optimization. IEEE Trans. Signal Process. 2013, 61, 5603–5619. [Google Scholar] [CrossRef]
- Sen, S. PAPR-constrained pareto-optimal waveform design for OFDM-STAP radar. IEEE Trans. Geosci. Remote Sens. 2013, 52, 3658–3669. [Google Scholar] [CrossRef]
- Li, J.; Xu, L.; Stoica, P.; Forsythe, K.W.; Bliss, D.W. Range compression and waveform optimization for MIMO radar: A Cramér–Rao bound based study. IEEE Trans. Signal Process. 2007, 56, 218–232. [Google Scholar]
- Li, Z.; Shi, J.; Liu, W.; Pan, J.; Li, B. Robust joint design of transmit waveform and receive filter for MIMO-STAP radar under target and clutter uncertainties. IEEE Trans. Veh. Technol. 2021, 71, 1156–1171. [Google Scholar] [CrossRef]
- Cui, G.; Fu, Y.; Yu, X.; Li, J.; Gui, G. Robust transmitter–receiver design for extended target in signal-dependent interference. Signal Process. 2018, 147, 60–67. [Google Scholar] [CrossRef]
- Yang, J.; Aubry, A.; De Maio, A.; Yu, X.; Cui, G. Multi-spectrally constrained transceiver design against signal-dependent interference. IEEE Trans. Signal Process. 2022, 70, 1320–1332. [Google Scholar] [CrossRef]
- Van Trees, H.L. Optimum Array Processing: Part IV of Detection, Estimation, and Modulation Theory; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Ben-Tal, A.; Nemirovski, A. Lectures on Modern Monvex Mptimization (2012); SIAM: Philadelphia, PA, USA, 2011. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 4 | 6 | 8 | 10 | |
|---|---|---|---|---|
| Computational time/s | 627.077466 | 770.360833 | 1007.908756 | 1303.744407 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, C.; Xie, Z.; Wang, J.; Xu, Z.; Huang, X. Robust MIMO Waveform Design in the Presence of Unknown Mutipath Return. Remote Sens. 2022, 14, 4356. https://doi.org/10.3390/rs14174356
Fan C, Xie Z, Wang J, Xu Z, Huang X. Robust MIMO Waveform Design in the Presence of Unknown Mutipath Return. Remote Sensing. 2022; 14(17):4356. https://doi.org/10.3390/rs14174356
Chicago/Turabian StyleFan, Chongyi, Zhuang Xie, Jian Wang, Zhou Xu, and Xiaotao Huang. 2022. "Robust MIMO Waveform Design in the Presence of Unknown Mutipath Return" Remote Sensing 14, no. 17: 4356. https://doi.org/10.3390/rs14174356