
Unbiased Area Estimation Using Copernicus High Resolution Layers and Reference Data
 ,
,
Abstract
:1. Introduction
- Of higher accuracy than the map;
- Selected using a rigorous (randomised) probability design with known sample inclusion probabilities [16];
- Independent from the map and the data used to produce the map;
- Compatible with the map units considering thematic, temporal, spatial, and positional aspects.
2. Data
2.1. Copernicus High-Resolution Layer on Imperviousness (HRL IMD)
2.2. EEA Validation Data
2.3. LUCAS Survey Data
3. Methods
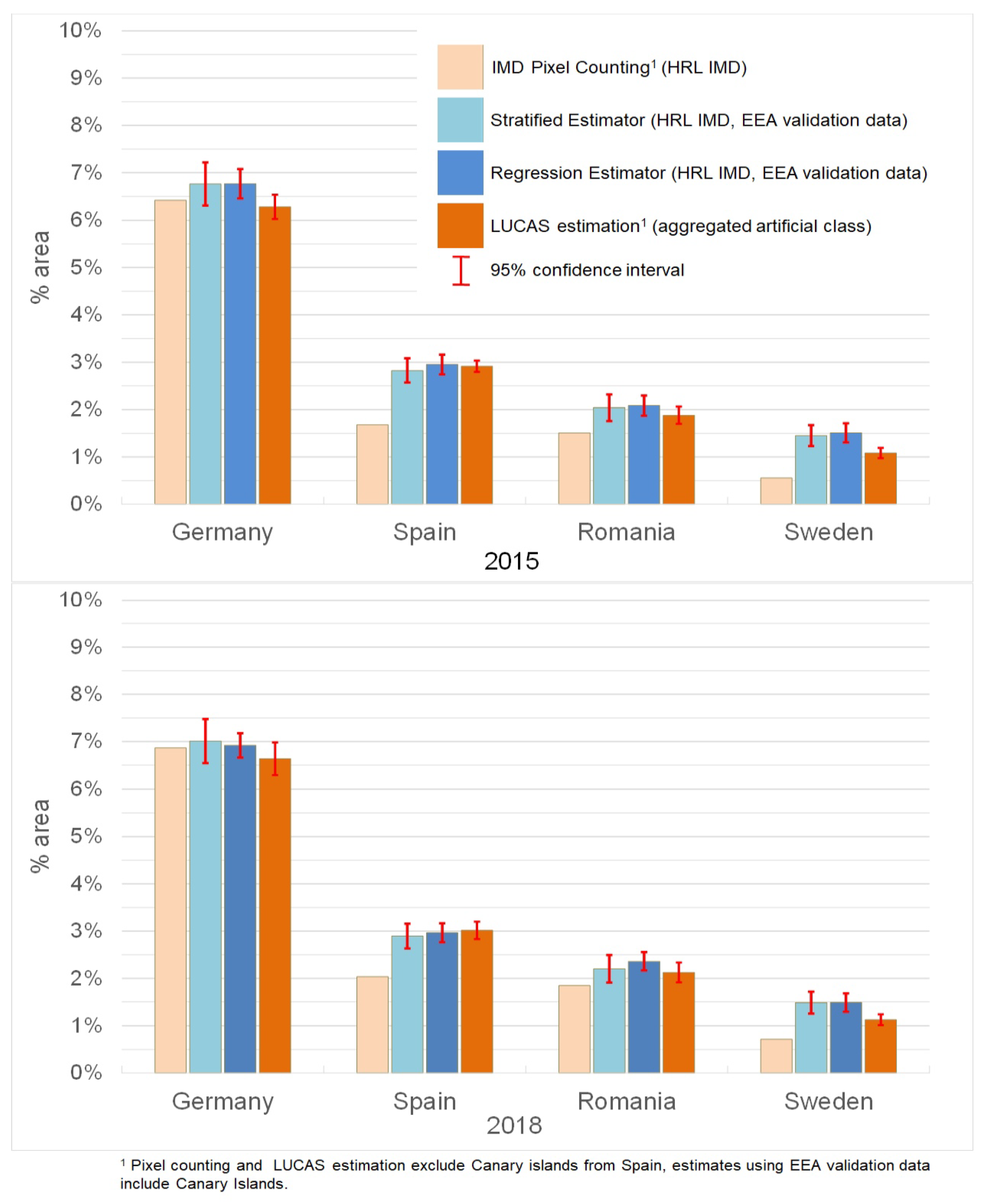
- Naive approach—simple pixel counting using HRL IMD;
- Stratified estimator using EEA validation data and HRL IMD;
- Regression estimator using EEA validation data and HRL IMD;
- Calibrated estimator using LUCAS data.
3.1. Using the HRL IMD for Simple Pixel Counting
3.2. Stratified Estimator Using the HRL Validation Data
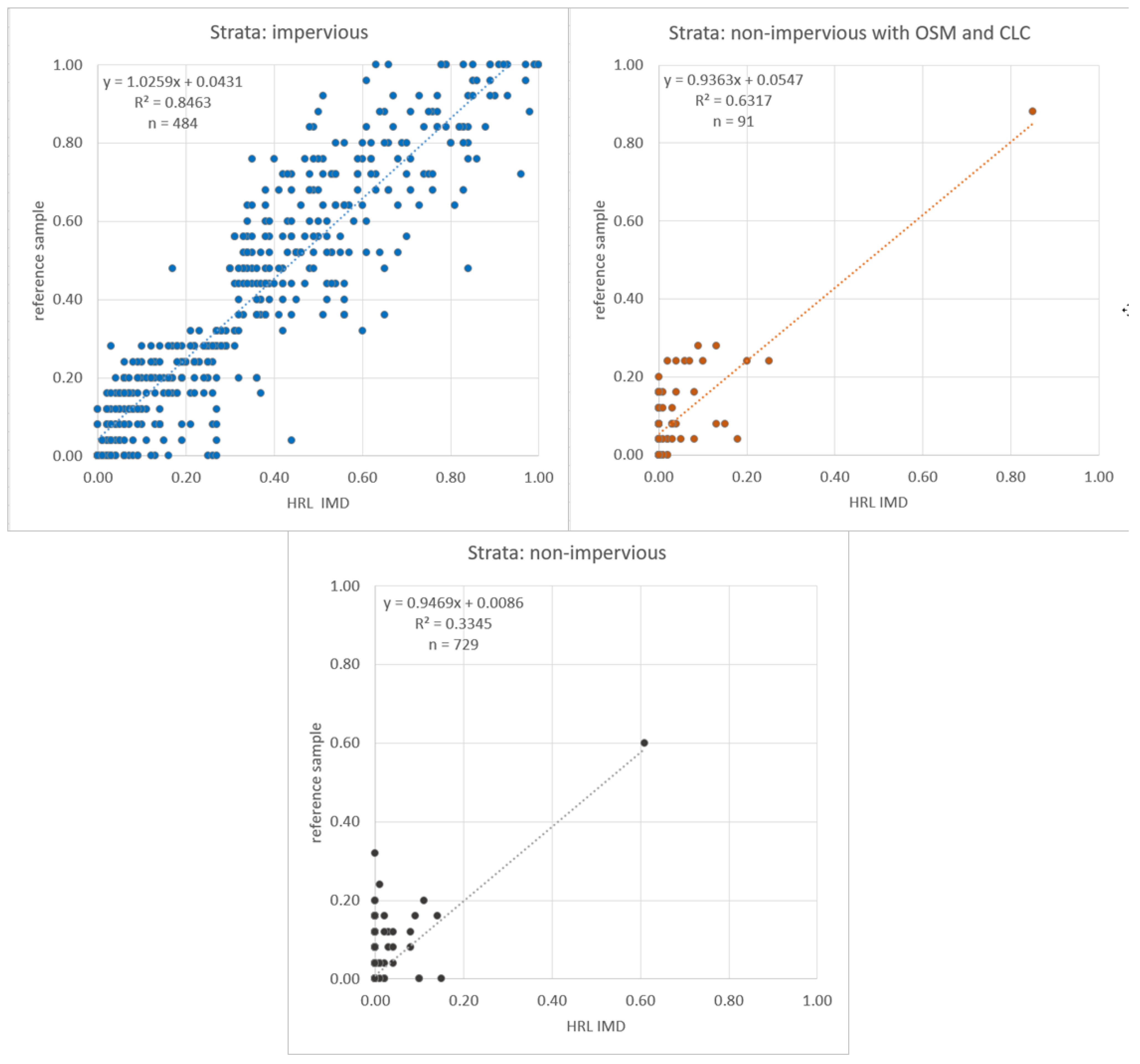
3.3. Regression Estimator Using HRL IMD and the HRL Validation Data
3.4. Estimating Impervious Area Using LUCAS Survey Data
4. Results
5. Discussion
6. Conclusions
- Reference data used for the HRL validation are published together with the products;
- The LUCAS sample weights, along with the required information of the sampling design and the stratification applied, are provided for the LUCAS core and Earth-Observation-related modules;
- HRL products are considered for stratification of the LUCAS master frame, and the LUCAS data are used for validation of the HRL products, provided that the methodological continuity of HRL is ensured.
- Further information on the area of applicability of the underlying classification models is provided to improve the spatial assessment of over- and underestimation,
- HRL products are considered for stratification of the LUCAS master frame and the LUCAS data aew used for validation of the HRL products, provided that the methodological continuity of HRL is ensured;
- The compatibility of the LUCAS survey components with Copernicus HRL products is ensured and improved, which is already the case in the LUCAS 2022 campaign [18].
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- GFOI. Integration of Remote-Sensing and Ground-Based Observations for Estimation of Emissions and Removals of Greenhouse Gases in Forests: Methods and Guidance from the Global Forest Observations Initiative, 3rd ed.; Global Forest Observations Initiative: Rome, Italy, 2020; Available online: https://www.reddcompass.org/mgd/resources/GFOI-MGD-3.1-en.pdf (accessed on 25 August 2022).
- GSARS. Handbook on Remote Sensing for Agricultural Statistics; Global Strategy to Improve Agricultural and Rural Statistics (GSARS): Rome, Italy, 2017; Available online: https://www.fao.org/3/ca6394en/ca6394en.pdf (accessed on 25 August 2022).
- Stehman, S.V.; Foody, G.M. Key issues in rigorous accuracy assessment of land cover products. Remote Sens. Environ. 2019, 231, 111199. [Google Scholar] [CrossRef]
- EEA. High Resolution Layers, © European Union, Copernicus Land Monitoring Service 2022; European Environment Agency (EEA). 2021. Available online: https://land.copernicus.eu/pan-european/high-resolution-layers/ (accessed on 25 August 2022).
- Gallego, F.J. Copernicus Land Services to Improve EU Statistics; Publications Office of the European Union: Luxembourg, 2017. [CrossRef]
- Gallego, F.J. Remote sensing and land cover area estimation. Int. J. Remote Sens. 2004, 25, 3019–3047. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- Foody, G.; Pal, M.; Rocchini, D.; Garzon-Lopez, C.; Bastin, L. The Sensitivity of Mapping Methods to Reference Data Quality: Training Supervised Image Classifications with Imperfect Reference Data. ISPRS Int. J. Geo-Inf. 2016, 5, 199. [Google Scholar] [CrossRef]
- Foody, G. Ground reference data error and the mis-estimation of the Area of land cover change as a function of its abundance. Remote Sens. Lett. 2013, 4, 783–792. [Google Scholar] [CrossRef]
- Benedetti, R.; Bee, M.; Espa, G.; Piersimoni, F. (Eds.) Agricultural Survey Methods; John Wiley & Sons: Chichester, UK, 2010. [Google Scholar] [CrossRef]
- Gallego, J.; Carfagna, E.; Baruth, B. Accuracy, objectivity and efficiency of remote sensing for agricultural statistics. In Agricultural Survey Methods; Benedetti, R., Bee, M., Espa, G., Piersimoni, F., Eds.; John Wiley & Sons: Chichester, UK, 2010; pp. 193–211. [Google Scholar]
- GEOSS. Best Practices for Crop Area Estimation with Remote Sensing; JRC Scientific and Technical Report; Joint Research Centre: Ispra, Italy, 2009; Available online: https://data.europa.eu/doi/10.2788/31835 (accessed on 25 August 2022).
- Stehman, S.V. Estimating area and map accuracy for stratified random sampling when the strata are different from the map classes. Int. J. Remote Sens. 2014, 35, 4923–4939. [Google Scholar] [CrossRef]
- Deville, J.C.; Särndal, C.E. Calibration estimators in survey sampling. J. Am. Stat. Assoc. 1992, 87, 376–382. [Google Scholar] [CrossRef]
- Pengra, B.; Stehman, S.; Horton, J.; Dockter, D.; Schroeder, T.; Yang, Z.; Cohen, W.; Healey, S.; Loveland, T. Quality control and assessment of interpreter consistency of annual land cover reference data in an operational national monitoring program. Remote Sens. Environ. 2019, 238, 111261. [Google Scholar] [CrossRef]
- Stehman, S.V. Basic probability sampling designs for thematic map accuracy assessment. Int. J. Remote Sens. 1999, 20, 2423–2441. [Google Scholar] [CrossRef]
- Cochran, W.G. Sampling Techniques, 3rd ed.; John Wiley & Sons: New York, NY, USA, 1977. [Google Scholar]
- Eurostat. LUCAS–Land Use and Land Cover Survey. 2021. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php?title=LUCAS_-_Land_use_and_land_cover_survey (accessed on 25 August 2022).
- d’Andrimont, R.; Yordanov, M.; Martinez-Sanchez, L.; Eiselt, B.; Palmieri, A.; Dominici, P.; Gallego, J.; Reuter, H.I.; Joebges, C.; Lemoine, G.; et al. Harmonised LUCAS in-situ land cover and use database for field surveys from 2006 to 2018 in the European Union. Sci. Data 2020, 7, 352. [Google Scholar] [CrossRef]
- Leinenkugel, P.; Deck, R.; Huth, J.; Ottinger, M.; Mack, B. The Potential of Open Geodata for Automated Large-Scale Land Use and Land Cover Classification. Remote Sens. 2019, 11, 2249. [Google Scholar] [CrossRef]
- d’Andrimont, R.; Verhegghen, A.; Lemoine, G.; Kempeneers, P.; Meroni, M.; van der Velde, M. From parcel to continental scale – A first European crop type map based on Sentinel-1 and LUCAS Copernicus in-situ observations. Remote Sens. Environ. 2021, 266, 112708. [Google Scholar] [CrossRef]
- Karydas, C.; Gitas, I.; Kuntz, S.; Minakou, C. Use of LUCAS LC Point Database for Validating Country-Scale Land Cover Maps. Remote Sens. 2015, 7, 5012–5041. [Google Scholar] [CrossRef]
- Gallego, J.; Bamps, C. Using CORINE land cover and the point survey LUCAS for area estimation. Int. J. Appl. Earth Obs. Geoinf. 2008, 10, 467–475. [Google Scholar] [CrossRef]
- Eurostat. NUTS–Nomenclature of Territorial Units for Statistics. 2021. Available online: https://ec.europa.eu/eurostat/web/nuts/background (accessed on 5 September 2022).
- Langanke, T. Copernicus Land Monitoring Service–High Resolution Layer Imperviousness: Product Specifications Document; European Environment Agency: Copenhagen, Denmark, 2016. Available online: https://land.copernicus.eu/user-corner/technical-library/hrl-imperviousness-technical-document-prod-2015 (accessed on 25 August 2022).
- Corbane, C.; Panagiotis, P.; Maffenini, L. MASADA User Guide: Version 2.0; Technical Report; Publications Office of the European Union: Luxembourg, 2019. [Google Scholar]
- EEA. Copernicus Land Monitoring Service. High Resolution Land Cover Characteristics. Lot1: Imperviousness 2018, Imperviousness Change 2015–2018 and Built-Up 2018. User Manual; European Environment Agency: Copenhagen, Denmark, 2018. Available online: https://land.copernicus.eu/user-corner/technical-library//imperviousness-2018-user-manual.pdf (accessed on 25 August 2022).
- Strand, G.H. Accuracy of the Copernicus High-Resolution Layer Imperviousness Density (HRL IMD) Assessed by Point Sampling within Pixels. Remote Sens. 2022, 14, 3589. [Google Scholar] [CrossRef]
- EEA. Copernicus Land Monitoring Service–HRL Imperviousness Degree 2015 Validation Report; GMES Initial Operations/Copernicus Land monitoring services—Validation of Products Third Specific Contract—N°3436/R0- COPERNICUS/EEA.57056; EEA: Copenhagen, Denmark, 2019. Available online: https://land.copernicus.eu/user-corner/technical-library/hrl-imperviousness-2015-validation-report (accessed on 25 August 2022).
- EEA. Copernicus Land monitoring Service–HRL Imperviousness Degree 2018 Validation Report; GMES Initial Operations/Copernicus Land Monitoring Services—Validation of Products Fourth Specific Contract—No 3436/R0- COPERNICUS/EEA.57889; EEA: Copenhagen, Denmark, 2020. Available online: https://land.copernicus.eu/user-corner/technical-library/clms_hrl_imd_validation_report_sc04_1_3.pdf (accessed on 25 August 2022).
- Ballin, M.; Barcaroli, G.; Masselli, M.; Scarnò, M. Redesign Sample for Land Use/Cover Area Frame Survey (LUCAS) 2018; Statistical Working Papers Eurostat; Publications Office of the European Union: Luxembourg, 2018. [CrossRef]
- Gallego, J.; Sannier, C.; Pennec, A. Validation of Copernicus Land Monitoring Services and Area Estimation. In Proceedings of the International Conference of Agricultural Statistics (ICAS), Rome, Italy, 26–28 October 2016; p. 7. Available online: https://land.copernicus.eu/user-corner/technical-library/validation-of-copernicus-land-monitoring-services-and-area-estimation (accessed on 25 August 2022).
- Gallego, J.; Delincé, J. The European land use and cover area-frame statistical survey. In Agricultural Survey Methods; Benedetti, R., Bee, M., Espa, G., Piersimoni, F., Eds.; John Wiley & Sons: Chichester, UK, 2010; pp. 151–168. [Google Scholar]
- Eurostat. LUCAS 2015–Technical Reference Document C1-Instructions for Surveyors; Technical Documents; Eurostat: Luxembourg, 2015.
- Eurostat. LUCAS 2018–Technical reference document C1-Instructions for Surveyors; Eurostat: Luxembourg, 2018.
- d’Andrimont, R.; Verhegghen, A.; Meroni, M.; Lemoine, G.; Strobl, P.; Eiselt, B.; Yordanov, M.; Martinez-Sanchez, L.; van der Velde, M. LUCAS Copernicus 2018: Earth-observation-relevant in situ data on land cover and use throughout the European Union. Earth Syst. Sci. Data 2021, 13, 1119–1133. [Google Scholar] [CrossRef]
- Gallego, F.J. Estimating and correcting the bias of pixel counting. In Handbook on Remote Sensing for Agricultural Statistics; Global Strategy to Improve Agricultural and Rural Statistics (GSARS); GSARS Handbook: Rome, Italy, 2017; pp. 249–257. [Google Scholar]
- Stehman, S. Estimating area from an accuracy assessment error matrix. Remote Sens. Environ. 2013, 132, 202–211. [Google Scholar] [CrossRef]
- Buck, O.; Haub, C.; Woditsch, S.; Lindemann, D.; Kleinewillinghöfer, L.; Hazeu, G.; Kosztra, B.; Kleeschulte, S.; Arnold, S.; Hölzl, M. Task 1.9—Analysis of the LUCAS Nomenclature and Proposal for Adaptation of the Nomenclature in View of Its Use by the Copernicus Land Monitoring Services; Service Contract Report No. 3436/B2015/R0-GIO/EEA.56166; European Environment Agency (EEA): Copenhagen, Denmark, 2015. Available online: https://land.copernicus.eu/user-corner/technical-library/lucas-copernicus-report-2015 (accessed on 25 August 2022).
- Eurostat. LUCAS 2022–Technical Reference Document C2-Field Form (Template); Eurostat: Luxembourg, 2022. Available online: https://ec.europa.eu/eurostat/documents/205002/13686460/C2-LUCAS-2022.pdf (accessed on 25 August 2022).
- Zardetto, D. ReGenesees: An Advanced R System for Calibration, Estimation and Sampling Error Assessment in Complex Sample Surveys. J. Off. Stat. 2015, 31, 177–203. [Google Scholar] [CrossRef]
- Zardetto, D. R Evolved Generalized Software for Sampling Estimates and Errors in Surveys. [Software Code and Documentation]. 2021. Available online: https://www.istat.it/en/methods-and-tools/methods-and-it-tools/process/processing-tools/regenesees (accessed on 25 August 2022).
- Czaplewski, R. Misclassification bias in areal estimates. Photogramm. Eng. Remote Sens. 1992, 58, 189–192. [Google Scholar]
- Carfagna, E.; Gallego, F.J. Using Remote Sensing for Agricultural Statistics. Int. Stat. Rev. 2006, 73, 389–404. [Google Scholar] [CrossRef]
- Meyer, H.; Pebesma, E. Predicting into unknown space? Estimating the area of applicability of spatial prediction models. Methods Ecol. Evol. 2021, 12, 1620–1633. [Google Scholar] [CrossRef]
- Pennec, A.; Sannier, C.; Smith, G. Comparative validation of Artificial Land Products; Technical Report Final Report of the GMES Initial Operations/Copernicus Land Monitoring Services–Validation of Products. Validation Services for the Geospatial Products of the Copernicus Land Continental and Local Components Including In-Situ Data (Lot 1), Third Specific Contract– N°3436/R0-COPERNICUS/EEA.57056; European Environment Agency: Copenhagen, Denmark, 2019. Available online: https://land.copernicus.eu/user-corner/technical-library/comparative-validation-of-artificial-land-products/ (accessed on 25 August 2022).



{kind=link}
{kind=link}
| Copernicus Product | Year | Spatial Resolution |
|---|---|---|
| HRL IMD | 2015 | 20 m Pixel |
| HRL IMD | 2018 | 10 m Pixel |
| HRL IMD aggregated | 2015/2018 | 100 m Pixel |
| Reference data | Year | Spatial resolution |
| EEA validation data | 2015/2018 | 100 m Pixel |
| LUCAS survey data | 2015/2018 | Point (with 1.5/20 m observation radius) |
| HRL IMD 2015 thematic accuracy | ||||
| AOI | User’s accuracy | CI 95% | Producer’s accuracy | CI 95% |
| Germany | 93.66% | 0.11% | 63.78% | 0.35% |
| Spain | 88.89% | 0.04% | 50.46% | 0.39% |
| Romania | 100% | 0.00% | 35.82% | 0.08% |
| Sweden | 100% | 0.00% | 29.36% | 0.64% |
| HRL IMD 2018 thematic accuracy | ||||
| AOI | User’s accuracy | CI 95% | Producer’s accuracy | CI 95% |
| Germany | 94.45% | 0.10% | 79.17% | 0.29% |
| Spain | 89.47% | 0.04% | 80.32% | 0.05% |
| Romania | 96.77% | 0.03% | 45.91% | 0.40% |
| Sweden | 95.32% | 0.02% | 49.58% | 0.68% |
| AOI | Number of Sample Units |
|---|---|
| Germany | 1304 |
| Spain | 1473 |
| Romania | 735 |
| Sweden | 1213 |
| AOI | 2015 | 2018 | ||
|---|---|---|---|---|
| Artificial | Non-Artificial | Artificial | Non-Artificial | |
| Germany | 1700 | 24,803 | 1910 | 24,834 |
| Spain | 1231 | 46,618 | 1947 | 43,250 |
| Romania | 312 | 16,407 | 631 | 15,940 |
| Sweden | 353 | 26,281 | 767 | 25,916 |
| Pixel Counting (HRL IMD) | Stratified Estimator (EEA Validation Data HRL IMD) | Regression Estimator (EEA Validation Data HRL IMD) | Calibrated Estimator (LUCAS) | |
|---|---|---|---|---|
| Area % | Area % (CV) | Area % (CV) | Area % (CV) | |
| 2015 | ||||
| Germany | 6.4 | 6.8 (3.4) | 6.8 (2.3) | 6.3 (2.1) |
| Spain | 1.7 | 2.8 (4.6) | 3.0 (3.6) | 2.9 (2.1) |
| Romania | 1.5 | 2.0 (7.0) | 2.1 (5.2) | 1.9 (4.9) |
| Sweden | 0.6 | 1.5 (7.8) | 1.5 (6.8) | 1.1 (5.1) |
| 2018 | ||||
| Germany | 6.9 | 7.0 (3.4) | 6.9 (1.9) | 6.7 (2.6) |
| Spain | 2.0 | 2.9 (4.6) | 3.0 (3.4) | 3.0 (3.1) |
| Romania | 1.8 | 2.2 (6.6) | 2.4 (4.2) | 2.1 (5.1) |
| Sweden | 0.7 | 1.5 (7.8) | 1.5 (6.6) | 1.1 (5.2) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kleinewillinghöfer, L.; Olofsson, P.; Pebesma, E.; Meyer, H.; Buck, O.; Haub, C.; Eiselt, B. Unbiased Area Estimation Using Copernicus High Resolution Layers and Reference Data. Remote Sens. 2022, 14, 4903. https://doi.org/10.3390/rs14194903
Kleinewillinghöfer L, Olofsson P, Pebesma E, Meyer H, Buck O, Haub C, Eiselt B. Unbiased Area Estimation Using Copernicus High Resolution Layers and Reference Data. Remote Sensing. 2022; 14(19):4903. https://doi.org/10.3390/rs14194903
Chicago/Turabian StyleKleinewillinghöfer, Luca, Pontus Olofsson, Edzer Pebesma, Hanna Meyer, Oliver Buck, Carsten Haub, and Beatrice Eiselt. 2022. "Unbiased Area Estimation Using Copernicus High Resolution Layers and Reference Data" Remote Sensing 14, no. 19: 4903. https://doi.org/10.3390/rs14194903