

Prediction of Radar Echo Space-Time Sequence Based on Improving TrajGRU Deep-Learning Model

 , ,
, , 
 , ,
, ,
Abstract
1. Introduction
2. Application of CNN-Based and RNN-Based Models in Precipitation Nowcasting
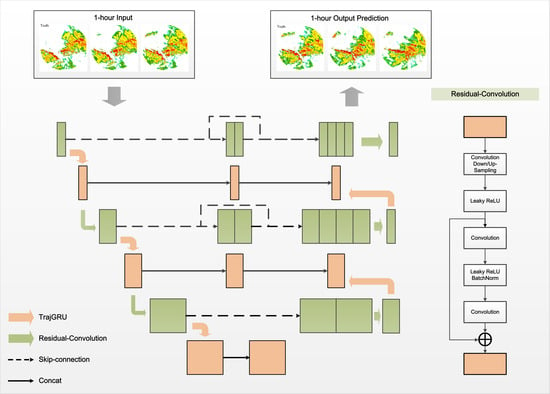
3. T-UNet Model
3.1. UNet
3.2. TrajGRU
3.3. Compared Models
4. Dataset and Experiments Design
4.1. Dataset
4.2. Experimental Design
5. Results
6. Conclusions
- Visual analysis results from two cases show that T-UNet can relatively effectively preserve the spatio-temporal characteristics of radar images in prediction; particularly, the details of strong echoes are closer to the ground truth.
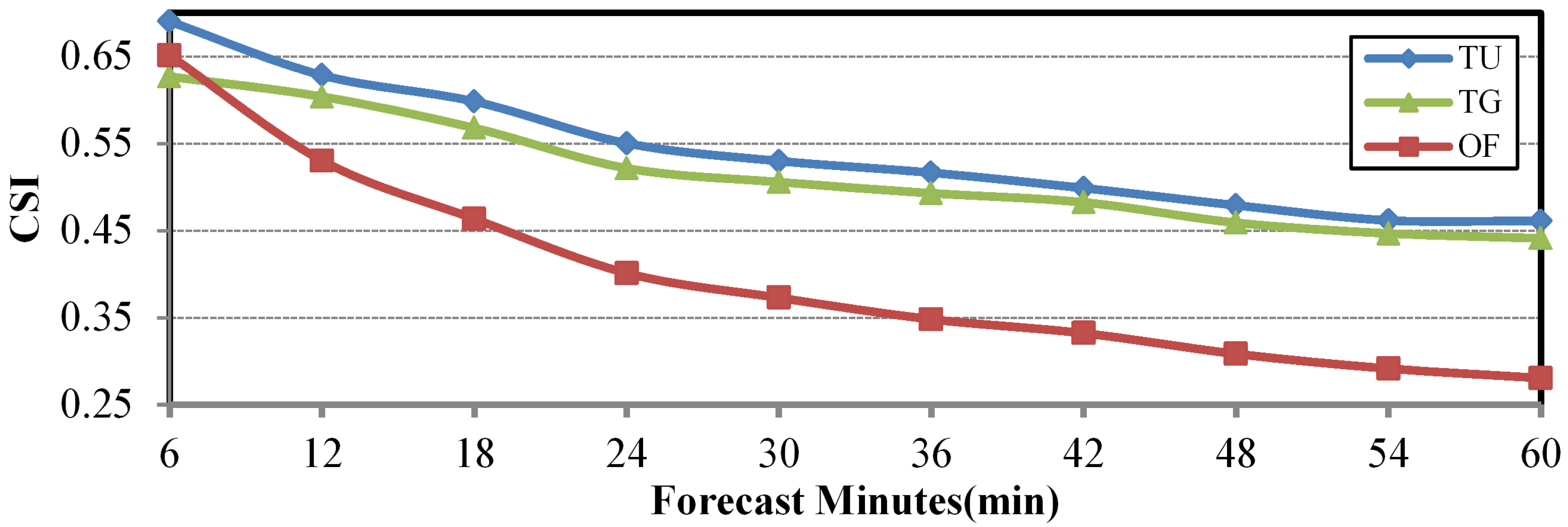
- The results obtained from the test set show that T-UNet improves by 9.6% and 7.05% in terms of B-MSE and B-MAE compared to TrajGRU, and similarly improve by 9.03% and 7.21% in terms of MSE and MAE. In addition, T-UNet performs better than TrajGRU at different thresholds for the common scoring functions CSI and HSS in meteorology, CSI has a maximum improvement by 10.57% at thresholds greater than 30 mm/h, and HSS also reaches a maximum improvement by 7.80% at thresholds greater than 30 mm/h. These numerical results show that T-UNet has higher accuracy than TrajGRU in the prediction of precipitation proximity and better ability in the prediction of strong echoes.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| NWP | Numerical weather prediction |
| TITAN | Thunderstorm Identification, Tracking, Analysis and Nowcasting |
| SCIT | Storm Cell Identification and Tracking |
| TREC | Tracking Radar Echoes by Correlation |
| ROVER | Real-time Optical flow by Variational methods for Echoes of Radar |
| LSTM | Long short term memory |
| RNN | Recurrent neural networks |
| GRU | Gated Recurrent Unit |
| ConvLSTM | Convolutional LSTM |
| TrajGRU | Trajectory GRU |
| CNN | Convolutional neural networks |
| SmaAt-UNet | Small AttenStion-UNet |
| CSI | Critical success index |
| HSS | Heidke skill score |
| MSE | Mean square error |
| MAE | Mean absolute error |
Appendix A
Appendix A.1

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Objetcs | Settings | |
|---|---|---|
| Basic layers | 3 | |
| Numbers of long skip-connection | 7 | |
| Convolutional filters | First layer | 64 |
| Second layer | 128 | |
| Third layer | 256 | |
| Down/Up-sampling | Kernel size | 4 × 4 |
| Stride | 2 × 2 | |
| Padding | 1 × 1 | |
| Residual network | Kernel size | 3 × 3 |
| Stride | 1 × 1 | |
| Padding | 1 × 1 | |
| TrajGRU | Kernel size | 3 × 3 |
| Stride | 1 × 1 | |
| Padding | 1 × 1 | |
| L | 15 | |
Appendix A.2
| Objetcs | Settings | |
|---|---|---|
| Basic layers | 5 | |
| Numbers of long skip-connection | 4 | |
| Reduction ratio of CBAM | 16 | |
| Convolutional filters | First layer | 64 |
| Second layer | 128 | |
| Third layer | 256 | |
| Third layer | 512 | |
| Third layer | 512 | |
| Down/Up-sampling | Kernel size | 3 × 3 |
| Stride | 1 × 1 | |
| Padding | 1 × 1 | |
Appendix A.3
| Objetcs | Settings | |
|---|---|---|
| Basic layers | 3 | |
| Reduction ratio of CBAM | 16 | |
| Convolutional filters | First layer | 64 |
| Second layer | 192 | |
| Third layer | 192 | |
| Convolution in RNN unit | Kernel size | 3 × 3 |
| Stride | 1 × 1 | |
| Padding | 1 × 1 | |
References
- Seed, A. A dynamic and spatial scaling approach to advection forecasting. J. Appl. Meteorol. 2003, 42, 381–388. [Google Scholar] [CrossRef]
- Wilson, J.W.; Crook, N.A.; Mueller, C.K.; Sun, J.; Dixon, M. Nowcasting thunderstorms: A status report. Bull. Am. Meteorol. Soc. 1998, 79, 2079–2100. [Google Scholar] [CrossRef]
- Bauer, P.; Thorpe, A.; Brunet, G. The quiet revolution of numerical weather prediction. Nature 2015, 525, 47–55. [Google Scholar] [CrossRef] [PubMed]
- Mehrkanoon, S. Deep shared representation learning for weather elements forecasting. Knowl.-Based Syst. 2019, 179, 120–128. [Google Scholar] [CrossRef]
- Reyniers, M. Quantitative Precipitation Forecasts Based on Radar Observations: Principles, Algorithms and Operational Systems; Institut Royal Météorologique de Belgique Brussel: Brussel, Belgium, 2008. [Google Scholar]
- Kawakatsu, H. Centroid single force inversion of seismic waves generated by landslides. J. Geophys. Res. Solid Earth 1989, 94, 12363–12374. [Google Scholar] [CrossRef]
- Cireşan, D.C.; Giusti, A.; Gambardella, L.M.; Schmidhuber, J. Mitosis detection in breast cancer histology images with deep neural networks. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Nagoya, Japan, 22–26 September 2013; Springer: Berlin/Heidelberg, Germany, 2013; pp. 411–418. [Google Scholar]
- Lucas, B.D.; Kanade, T. An Iterative Image Registration Technique with an Application to Stereo Vision. In Proceedings of the IJCAI’81: 7th International Joint Conference on Artificial Intelligence, Vancouver, BC, Canada, 24—28 August 1981; Volume 81. [Google Scholar]
- Dixon, M.; Wiener, G. TITAN: Thunderstorm identification, tracking, analysis, and nowcasting—A radar-based methodology. J. Atmos. Ocean. Technol. 1993, 10, 785–797. [Google Scholar] [CrossRef]
- Johnson, J.; MacKeen, P.L.; Witt, A.; Mitchell, E.D.W.; Stumpf, G.J.; Eilts, M.D.; Thomas, K.W. The storm cell identification and tracking algorithm: An enhanced WSR-88D algorithm. Weather Forecast. 1998, 13, 263–276. [Google Scholar] [CrossRef]
- Woo, W.; Wong, W. Application of optical flow techniques to rainfall nowcasting. In Proceedings of the 27th Conference on Severe Local Storms, Madison, WI, USA, 3–7 November 2014. [Google Scholar]
- Gultepe, I.; Sharman, R.; Williams, P.D.; Zhou, B.; Ellrod, G.; Minnis, P.; Trier, S.; Griffin, S.; Yum, S.; Gharabaghi, B.; et al. A review of high impact weather for aviation meteorology. Pure Appl. Geophys. 2019, 176, 1869–1921. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. Imagenet large scale visual recognition challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar] [CrossRef]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A.A. Inception-v4, inception-resnet and the impact of residual connections on learning. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017. [Google Scholar]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 834–848. [Google Scholar] [CrossRef]
- Havaei, M.; Davy, A.; Warde-Farley, D.; Biard, A.; Courville, A.; Bengio, Y.; Pal, C.; Jodoin, P.M.; Larochelle, H. Brain tumor segmentation with deep neural networks. Med. Image Anal. 2017, 35, 18–31. [Google Scholar] [CrossRef]
- Lin, G.; Milan, A.; Shen, C.; Reid, I. Refinenet: Multi-path refinement networks for high-resolution semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1925–1934. [Google Scholar]
- Mikolov, T.; Sutskever, I.; Chen, K.; Corrado, G.S.; Dean, J. Distributed representations of words and phrases and their compositionality. Adv. Neural Inf. Process. Syst. 2013, 26. [Google Scholar] [CrossRef]
- Huang, Z.; Xu, W.; Yu, K. Bidirectional LSTM-CRF models for sequence tagging. arXiv 2015, arXiv:1508.01991. [Google Scholar]
- Conneau, A.; Schwenk, H.; Barrault, L.; Lecun, Y. Very deep convolutional networks for text classification. arXiv 2016, arXiv:1606.01781. [Google Scholar]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef]
- Han, L.; Zhao, Y.; Chen, H.; Chandrasekar, V. Advancing radar nowcasting through deep transfer learning. IEEE Trans. Geosci. Remote. Sens. 2021, 60, 4100609. [Google Scholar] [CrossRef]
- Sutskever, I.; Vinyals, O.; Le, Q.V. Sequence to sequence learning with neural networks. Adv. Neural Inf. Process. Syst. 2014, 27. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Convolutional LSTM network: A machine learning approach for precipitation nowcasting. Adv. Neural Inf. Process. Syst. 2015, 28. [Google Scholar] [CrossRef]
- Tan, C.; Feng, X.; Long, J.; Geng, L. FORECAST-CLSTM: A new convolutional LSTM network for cloudage nowcasting. In Proceedings of the 2018 IEEE Visual Communications and Image Processing (VCIP), Taichung, Taiwan, 9–12 December 2018; pp. 1–4. [Google Scholar]
- Shi, X.; Gao, Z.; Lausen, L.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Deep learning for precipitation nowcasting: A benchmark and a new model. Adv. Neural Inf. Process. Syst. 2017, 30. [Google Scholar] [CrossRef]
- Sharif Razavian, A.; Azizpour, H.; Sullivan, J.; Carlsson, S. CNN features off-the-shelf: An astounding baseline for recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Columbus, OH, USA, 23–28 June 2014; pp. 806–813. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; Springer: Berlin/Heidelberg, Germany, 2015; pp. 234–241. [Google Scholar]
- Zhou, Z.; Siddiquee, M.; Tajbakhsh, N.; Liang, J.U. A Nested U-Net Architecture for Medical Image Segmentation. arXiv 2018, arXiv:1807.10165. [Google Scholar]
- Agrawal, S.; Barrington, L.; Bromberg, C.; Burge, J.; Gazen, C.; Hickey, J. Machine learning for precipitation nowcasting from radar images. arXiv 2019, arXiv:1912.12132. [Google Scholar]
- Ayzel, G.; Scheffer, T.; Heistermann, M. RainNet v1.0: A convolutional neural network for radar-based precipitation nowcasting. Geosci. Model Dev. 2020, 13, 2631–2644. [Google Scholar] [CrossRef]
- Nie, T.; Deng, K.; Shao, C.; Zhao, C.; Ren, K.; Song, J. Self-attention UNet Model for Radar Based Precipitation Nowcasting. In Proceedings of the 2021 IEEE Sixth International Conference on Data Science in Cyberspace (DSC), Shenzhen, China, 9–11 October 2021; pp. 493–499. [Google Scholar]
- Zhang, Y.; Bi, S.; Liu, L.; Chen, H.; Zhang, Y.; Shen, P.; Yang, F.; Wang, Y.; Zhang, Y.; Yao, S. Deep learning for polarimetric radar quantitative precipitation estimation during landfalling typhoons in South China. Remote Sens. 2021, 13, 3157. [Google Scholar] [CrossRef]
- Chung, J.; Gulcehre, C.; Cho, K.; Bengio, Y. Empirical evaluation of gated recurrent neural networks on sequence modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]
- Wang, Y.; Long, M.; Wang, J.; Gao, Z.; Yu, P.S. Predrnn: Recurrent neural networks for predictive learning using spatiotemporal lstms. Adv. Neural Inf. Process. Syst. 2017, 30. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, L.; Yang, M.H.; Li, L.J.; Long, M.; Fei-Fei, L. Eidetic 3D LSTM: A model for video prediction and beyond. In Proceedings of the International Conference on Learning Representations, Vancouver, BC, Canada, 30 April –3 May 2018. [Google Scholar]
- Trebing, K.; Stanczyk, T.; Mehrkanoon, S. SmaAt-UNet: Precipitation nowcasting using a small attention-UNet architecture. Pattern Recognit. Lett. 2021, 145, 178–186. [Google Scholar] [CrossRef]
- Pan, X.; Lu, Y.; Zhao, K.; Huang, H.; Wang, M.; Chen, H. Improving Nowcasting of Convective Development by Incorporating Polarimetric Radar Variables Into a Deep-Learning Model. Geophys. Res. Lett. 2021, 48, e2021GL095302. [Google Scholar] [CrossRef]
- Alvarez, L.; Weickert, J.; Sánchez, J. Reliable estimation of dense optical flow fields with large displacements. Int. J. Comput. Vis. 2000, 39, 41–56. [Google Scholar] [CrossRef]
- Hogan, R.J.; Ferro, C.A.; Jolliffe, I.T.; Stephenson, D.B. Equitability revisited: Why the “equitable threat score” is not equitable. Weather Forecast. 2010, 25, 710–726. [Google Scholar] [CrossRef]
- Lee, J.E.; Kwon, S.; Jung, S.H. Real-Time Calibration and Monitoring of Radar Reflectivity on Nationwide Dual-Polarization Weather Radar Network. Remote Sens. 2021, 13, 2936. [Google Scholar] [CrossRef]










| Models | B-MSE↓ | B-MAE↓ | MSE↓ | MAE↓ |
|---|---|---|---|---|
| T-UNet | 801 | 2805 | 423 | 1468 |
| TrajGRU | 886 | 3018 | 465 | 1582 |
| SmaAt-UNet | 1736 | 4962 | 590 | 1957 |
| Optical Flow | 1977 | 4829 | 518 | 1724 |
| Threshold | Models | CSI↑ | HSS↑ |
|---|---|---|---|
| 0.5 | T-UNet | 0.65 | 0.767 |
| TrajGRU | 0.628 | 0.751 | |
| SmaAt-UNet | 0.494 | 0.634 | |
| Optical Flow | 0.573 | 0.703 | |
| 10 | T-UNet | 0.394 | 0.55 |
| TrajGRU | 0.368 | 0.525 | |
| SmaAt-UNet | 0.182 | 0.299 | |
| Optical Flow | 0.304 | 0.447 | |
| 30 | T-UNet | 0.293 | 0.442 |
| TrajGRU | 0.265 | 0.41 | |
| SmaAt-UNet | 0.005 | 0.097 | |
| Optical Flow | 0.178 | 0.284 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, Q.; Li, H.; Zhang, T.; He, J.; Zhang, F.; Wang, H.; Qing, Z.; Yu, Q.; Shen, B. Prediction of Radar Echo Space-Time Sequence Based on Improving TrajGRU Deep-Learning Model. Remote Sens. 2022, 14, 5042. https://doi.org/10.3390/rs14195042
Zeng Q, Li H, Zhang T, He J, Zhang F, Wang H, Qing Z, Yu Q, Shen B. Prediction of Radar Echo Space-Time Sequence Based on Improving TrajGRU Deep-Learning Model. Remote Sensing. 2022; 14(19):5042. https://doi.org/10.3390/rs14195042
Chicago/Turabian StyleZeng, Qiangyu, Haoran Li, Tao Zhang, Jianxin He, Fugui Zhang, Hao Wang, Zhipeng Qing, Qiu Yu, and Bangyue Shen. 2022. "Prediction of Radar Echo Space-Time Sequence Based on Improving TrajGRU Deep-Learning Model" Remote Sensing 14, no. 19: 5042. https://doi.org/10.3390/rs14195042
APA StyleZeng, Q., Li, H., Zhang, T., He, J., Zhang, F., Wang, H., Qing, Z., Yu, Q., & Shen, B. (2022). Prediction of Radar Echo Space-Time Sequence Based on Improving TrajGRU Deep-Learning Model. Remote Sensing, 14(19), 5042. https://doi.org/10.3390/rs14195042