
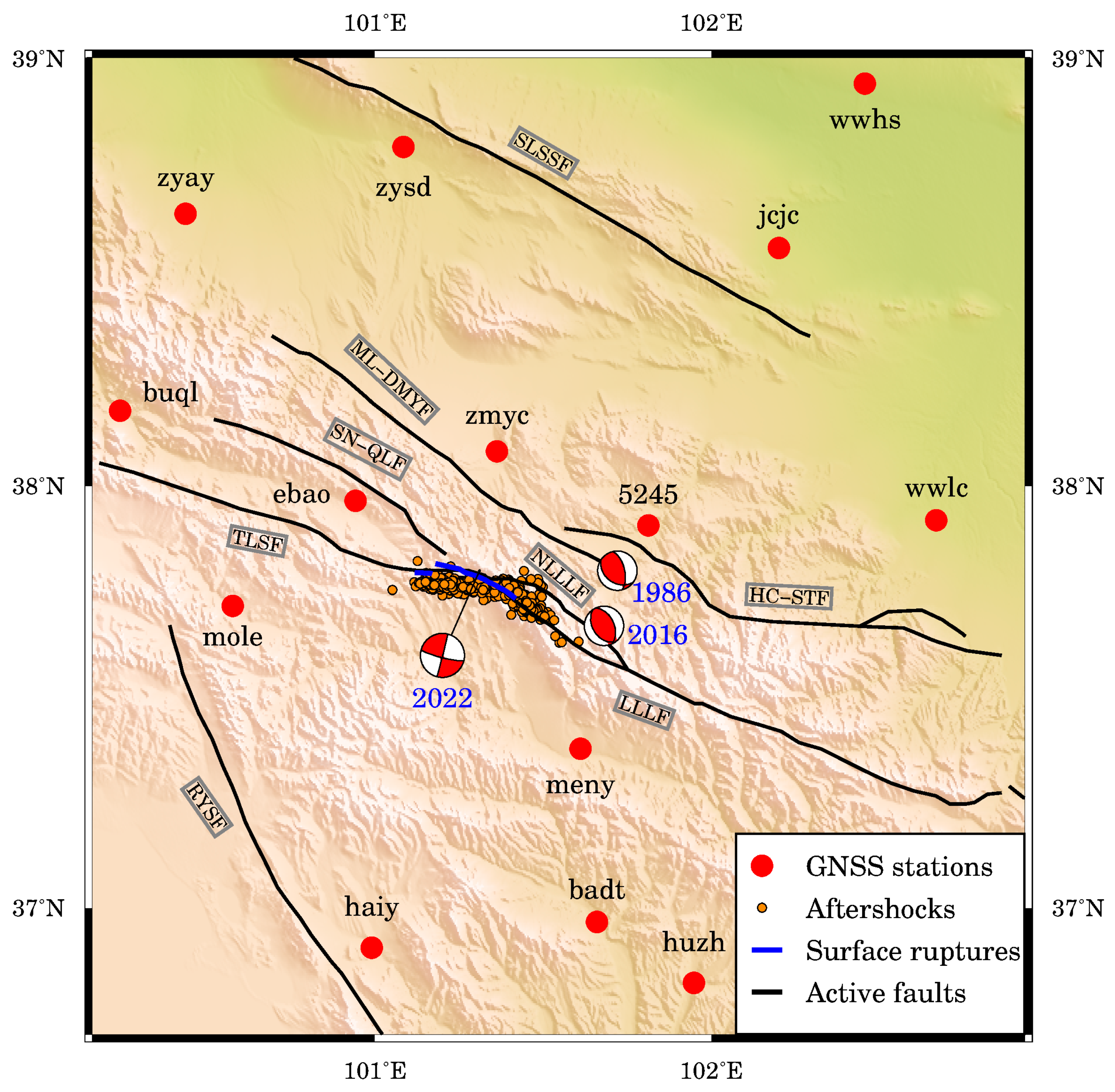
Real-Time Source Modeling of the 2022 Mw 6.6 Menyuan, China Earthquake with High-Rate GNSS Observations

 , ,
, ,  , ,
, ,
Abstract
:1. Introduction
2. Methods
2.1. Real-Time Precise Point Positioning
2.2. Warning Magnitude Calculation
2.3. Centroid Moment Tensor Inversion
2.4. Static Fault Slip Distribution Inversion
3. Results
3.1. Warning Magnitude Calculation
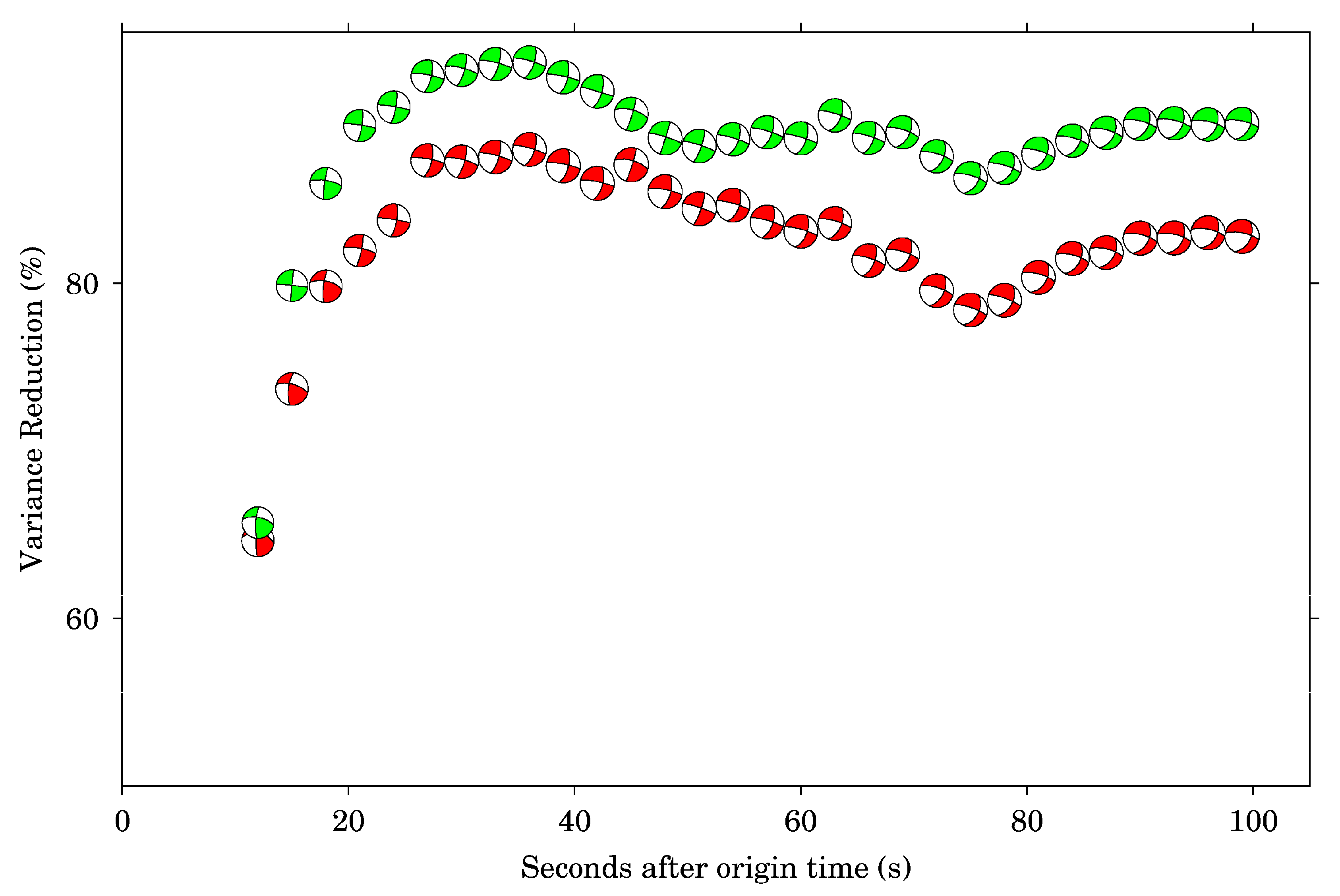
3.2. Centroid Moment Tensor Inversion
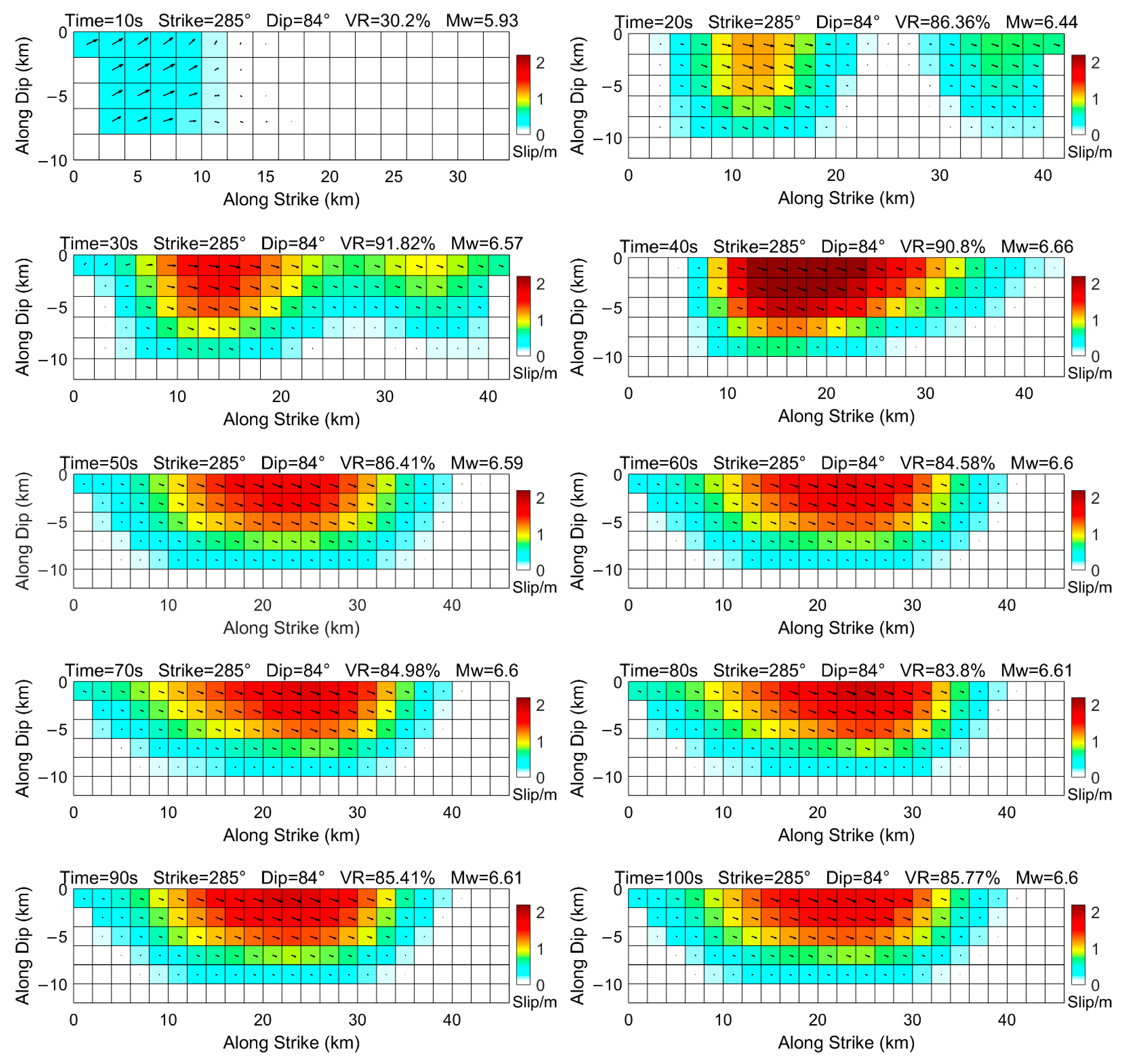
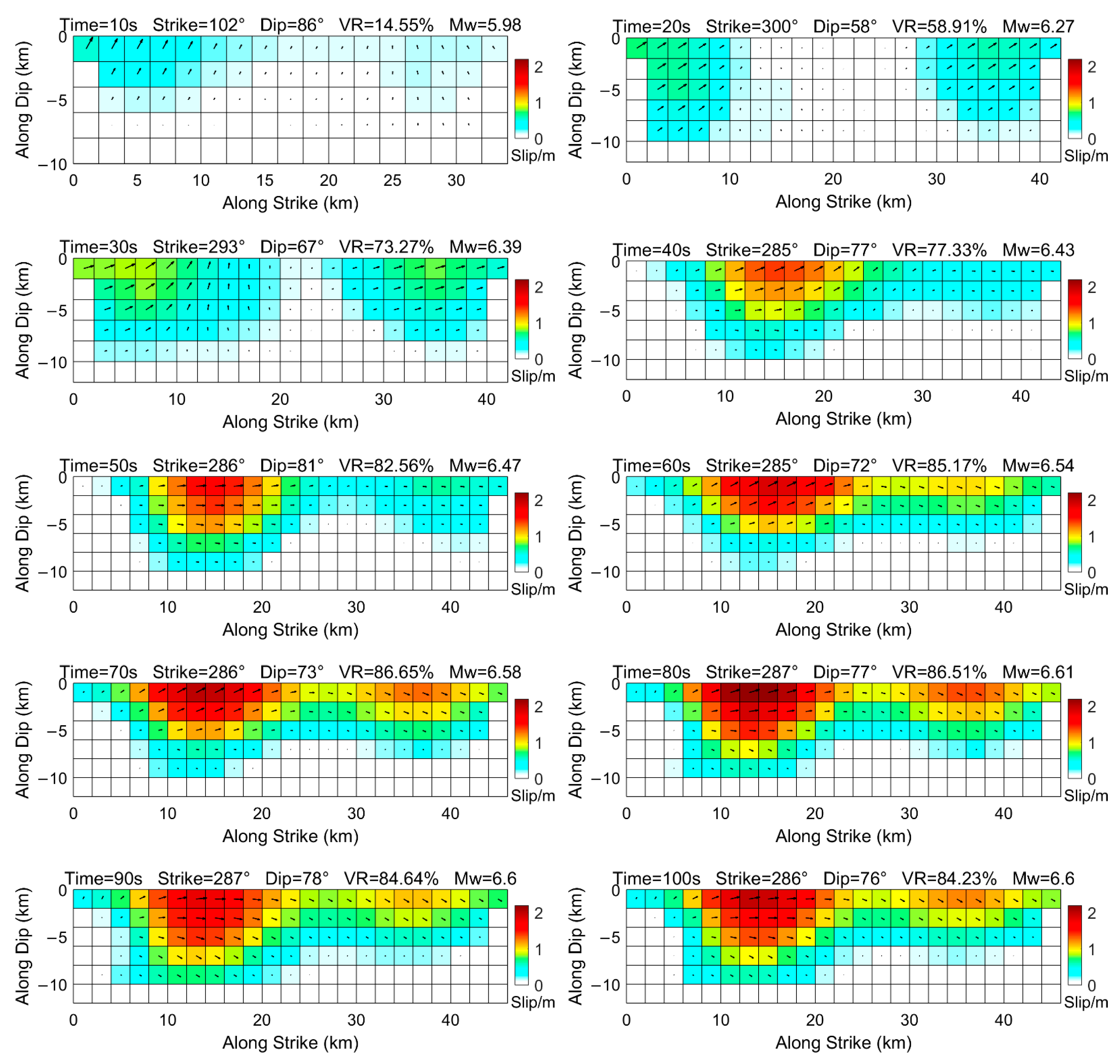
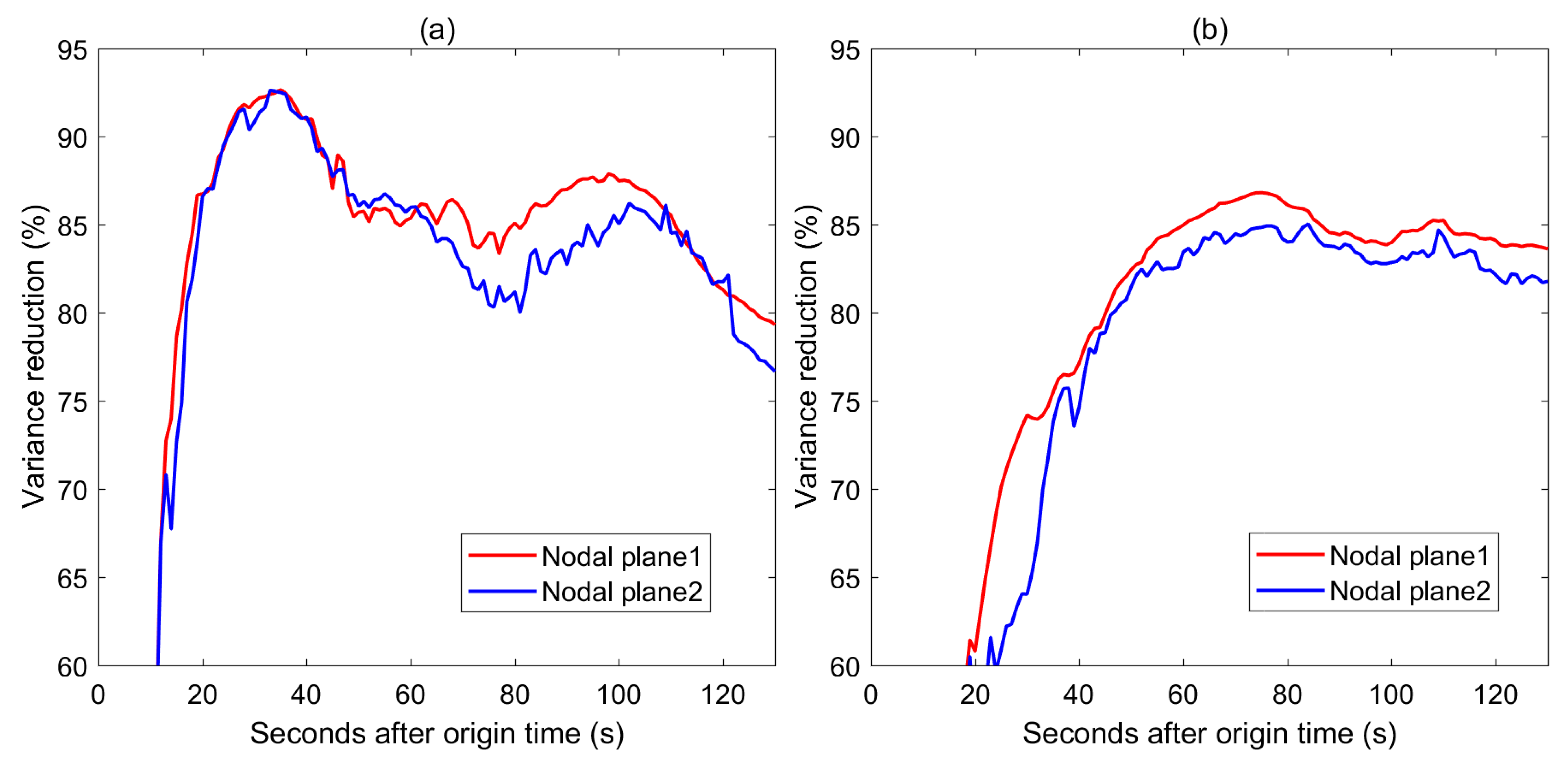
3.3. Static Fault Slip Distribution Inversion
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wu, Y.; Zhao, L. Magnitude estimation using the first three seconds P-wave amplitude in earthquake early warning. Geophys. Res. Lett. 2006, 33, L16312. [Google Scholar] [CrossRef] [Green Version]
- Zollo, A.; Lancieri, M.; Nielsen, S. Earthquake magnitude estimation from peak amplitudes of very early seismic signals on strong motion records. Geophys. Res. Lett. 2006, 33, L23312. [Google Scholar] [CrossRef]
- Brown, H.; Allen, R.; Hellweg, M.; Khainovski, O.; Neuhauser, D.; Souf, A. Development of the ElarmS methodology for earthquake early warning: Realtime application in California and offline testing in Japan. Soil Dyn. Earthquake Eng. 2011, 31, 188–200. [Google Scholar] [CrossRef]
- Larson, K.; Bodin, P.; Gomberg, J. Using 1-Hz GPS Data to Measure Deformations Caused by the Denali Fault Earthquake. Science 2003, 300, 1421–1424. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kouba, J. Measuring Seismic Waves Induced by Large Earthquakes with GPS. Stud. Geophys. Et Geod. 2003, 47, 741–755. [Google Scholar] [CrossRef]
- Bock, Y.; Prawirodirdjo, L.; Melbourne, T. Detection of arbitrarily large dynamic ground motions with a dense high-rate GPS network. Geophys. Res. Lett. 2004, 31, L06604. [Google Scholar] [CrossRef] [Green Version]
- Shi, C.; Lou, Y.; Zhang, H.; Zhao, Q.; Geng, J.; Wang, R.; Fang, R.; Liu, J. Seismic deformation of the Mw 8.0 Wenchuan earthquake from high-rate GPS observations. Adv. Space Res. 2010, 46, 228–235. [Google Scholar] [CrossRef] [Green Version]
- Colosimo, G.; Crespi, M.; Mazzoni, A. Real-time GPS seismology with a stand-alone receiver: A preliminary feasibility demonstration. J. Geophys. Res. 2011, 116, B11302. [Google Scholar] [CrossRef] [Green Version]
- Avallone, A.; Marzario, M.; Cirella, A.; Piatanesi, A.; Rovelli, A.; Di Alessandro, C.; D’Anastasio, E.; D’Agostino, N.; Giuliani, R.; Mattone, M. Very high rate (10 Hz) GPS seismology for moderate-magnitude earthquakes: The case of the Mw 6.3 L’Aquila (central Italy) event. J. Geophys. Res. 2011, 116, B02305. [Google Scholar] [CrossRef]
- Ebinuma, T.; Kato, T. Dynamic characteristics of very-high-rate GPS observations for seismology. Earth Planets Space 2012, 64, 369–377. [Google Scholar] [CrossRef]
- Xu, P.; Shi, C.; Fang, R.; Liu, J.; Niu, X.; Zhang, Q.; Yanagidani, T. High-rate precise point positioning (PPP) to measure seismic wave motions: An experimental comparison of GPS PPP with inertial measurement units. J. Geod. 2013, 87, 361–372. [Google Scholar] [CrossRef]
- Lou, Y.; Zhang, W.; Shi, C.; Liu, J. High-rate (1-Hz and 50-Hz) GPS seismology: Application to the 2013 Mw 6.6 Lushan earthquake. J. Asian Earth Sci. 2014, 79, 426–431. [Google Scholar] [CrossRef]
- Geng, T.; Xie, X.; Fang, R.; Su, X.; Zhao, Q.; Liu, G.; Li, H.; Shi, C.; Liu, J. Real-time capture of seismic waves using high-rate multi-GNSS observations: Application to the 2015 Mw 7.8 Nepal earthquake. Geophys. Res. Lett. 2016, 43, 161–167. [Google Scholar] [CrossRef] [Green Version]
- Chen, K.; Ge, M.; Babeyko, A.; Li, X.; Diao, F.; Tu, R. Retrieving real-time co-seismic displacements using GPS/GLONASS: A preliminary report from the September 2015 Mw8.3 Illapel earthquake in Chile. Geophys. J. Int. 2016, 206, 941–953. [Google Scholar] [CrossRef] [Green Version]
- Geng, J.; Jiang, P.; Liu, J. Integrating GPS with GLONASS for high-rate seismogeodesy. Geophys. Res. Lett. 2017, 44, 3139–3146. [Google Scholar] [CrossRef]
- Shu, Y.; Fang, R.; Li, M.; Shi, C.; Li, M.; Liu, J. Very high-rate GPS for measuring dynamic seismic displacements without aliasing: Performance evaluation of the variometric approach. GPS Solut. 2018, 22, 121. [Google Scholar] [CrossRef]
- Li, X.; Zheng, K.; Li, X.; Liu, G.; Ge, M.; Wickert, J.; Schuh, H. Real-time capturing of seismic waveforms using high-rate BDS, GPS and GLONASS observations: The 2017 Mw 6.5 Jiuzhaigou earthquake in China. GPS Solut. 2019, 23, 17. [Google Scholar] [CrossRef]
- Zang, J.; Xu, C.; Chen, G.; Wen, Q.; Fan, S. Real-time coseismic deformations from adaptively tight integration of high-rate GNSS and strong motion records. Geophys. J. Int. 2019, 219, 1757–1772. [Google Scholar] [CrossRef]
- Crowell, B. Near-Field Strong Ground Motions from GPS-Derived Velocities for 2020 Intermountain Western United States Earthquakes. Seismol. Res. Lett. 2021, 92, 840–848. [Google Scholar] [CrossRef]
- Li, Z.; Ding, K.; Zhang, P.; Wen, Y.; Zhao, L.; Chen, J. Co-seismic deformation and slip distribution of 2021 Mw 7.4 madoi earthquake from GNSS observation. Geomat. Inf. Sci. Wuhan Univ. 2021, 46, 1489–1497. [Google Scholar] [CrossRef]
- Zheng, K.; Liu, K.; Zhang, X.; Wen, G.; Chen, M.; Zeng, X.; Zhao, L.; He, X. First results using high-rate BDS-3 observations: Retrospective real-time analysis of 2021 Mw 7.4 Madoi (Tibet) earthquake. J. Geod. 2022, 96, 51. [Google Scholar] [CrossRef]
- Crowell, B.; Melgar, D.; Bock, Y.; Haase, J.; Geng, J. Earthquake magnitude scaling using seismogeodetic data. Geophys. Res. Lett. 2013, 40, 6089–6094. [Google Scholar] [CrossRef]
- Melgar, D.; Crowell, W.; Geng, J.; Allen, R.; Bock, Y.; Riquelme, S.; Hill, E.; Protti, M.; Ganas, A. Earthquake magnitude calculation without saturation from the scaling of peak ground displacement. Geophys. Res. Lett. 2015, 42, 5197–5205. [Google Scholar] [CrossRef]
- Ruhl, C.; Melgar, D.; Geng, J.; Goldberg, D.; Crowell, B.; Allen, R.; Bock, Y.; Barrientos, S.; Riquelme, S.; Baez, J.; et al. A Global Database of Strong-Motion Displacement GNSS Recordings and an Example Application to PGD Scaling. Seismol. Res. Lett. 2019, 90, 271–279. [Google Scholar] [CrossRef] [Green Version]
- Melgar, D.; Melbourne, T.; Crowell, B.; Geng, J.; Szeliga, W.; Scrivner, C.; Santillan, M.; Goldberg, D. Real-Time High-Rate GNSS Displacements: Performance Demonstration during the 2019 Ridgecrest, California, Earthquakes. Seismol. Res. Lett. 2020, 91, 1943–1951. [Google Scholar] [CrossRef]
- Zang, J.; Xu, C.; Li, X. Scaling earthquake magnitude in real time with high-rate GNSS peak ground displacement from variometric approach. GPS Solut. 2020, 24, 101. [Google Scholar] [CrossRef]
- Hodgkinson, K.; Mencin, D.; Feaux, K.; Sievers, C.; Mattioli, G. Evaluation of Earthquake Magnitude Estimation and Event Detection Thresholds for Real-Time GNSS Networks: Examples from Recent Events Captured by the Network of the Americas. Seismol. Res. Lett. 2020, 91, 1628–1645. [Google Scholar] [CrossRef]
- Fang, R.; Zheng, J.; Geng, J.; Shu, Y.; Shi, C.; Liu, J. Earthquake Magnitude Scaling Using Peak Ground Velocity Derived from High-Rate GNSS Observations. Seismol. Res. Lett. 2021, 92, 227–237. [Google Scholar] [CrossRef]
- Gao, Z.; Li, Y.; Shan, X.; Zhu, C. Earthquake Magnitude Estimation from High-Rate GNSS Data: A Case Study of the 2021 Mw 7.3 Maduo Earthquake. Remote Sens. 2021, 13, 4478. [Google Scholar] [CrossRef]
- Melgar, D.; Bock, Y.; Crowell, B. Real-time centroid moment tensor determination for large earthquakes from local and regional displacement records. Geophys. J. Int. 2012, 188, 703–718. [Google Scholar] [CrossRef]
- O’Toole, T.; Valentine, A.; Woodhouse, J. Earthquake source parameters from GPS-measured static displacements with potential for real-time application. Geophys. Res. Lett. 2013, 40, 60–65. [Google Scholar] [CrossRef] [Green Version]
- Minson, S.; Murray, J.; Langbein, J.; Gomberg, J. Real-time inversions for finite fault slip models and rupture geometry based on high-rate GPS data. J. Geophys. Res. Solid Earth 2014, 119, 3201–3231. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, R.; Zschau, J.; Chen, Y.; Parolai, S.; Dahm, T. Automatic imaging of earthquake rupture processes by iterative deconvolution and stacking of high-rate GPS and strong motion seismograms. J. Geophys. Res. Solid Earth 2014, 119, 5633–5650. [Google Scholar] [CrossRef] [Green Version]
- Allen, R.; Ziv, A. Application of real-time GPS to earthquake early warning. Geophys. Res. Lett. 2011, 38, L16310. [Google Scholar] [CrossRef]
- Ohta, Y.; Kobayashi, T.; Tsushima, H.; Miura, S.; Hino, R.; Takasu, T.; Fujimoto, H.; Iinuma, T.; Tachibana, K.; Demachi, T.; et al. Quasi real-time fault model estimation for near-field tsunami forecasting based on RTK-GPS analysis: Application to the 2011 Tohoku-Oki earthquake (Mw 9.0). J. Geophys. Res. Solid Earth 2012, 117, B02311. [Google Scholar] [CrossRef]
- Colombelli, S.; Allen, R.; Zollo, A. Application of real-time GPS to earthquake early warning in subduction and strike-slip environments. J. Geophys. Res. Solid Earth 2013, 118, 3448–3461. [Google Scholar] [CrossRef] [Green Version]
- Grapenthin, R.; Johanson, I.; Allen, R. Operational real-time GPS-enhanced earthquake early warning. J. Geophys. Res. Solid Earth 2014, 119, 7944–7965. [Google Scholar] [CrossRef]
- Crowell, B.; Melgar, D.; Geng, J. Hypothetical Real-Time GNSS Modeling of the 2016 Mw 7.8 Kaikōura Earthquake: Perspectives from Ground Motion and Tsunami Inundation Prediction. Bull. Seismol. Soc. Am. 2018, 108, 1736–1745. [Google Scholar] [CrossRef]
- Zang, J.; Xu, C.; Wen, Y.; Wang, X.; He, K. Rapid earthquake source description using Variometric-derived GPS displacements towards application to the 2019 Mw 7.1 Ridgecrest earthquake. Seismol. Res. Lett. 2022, 93, 56–67. [Google Scholar] [CrossRef]
- Zang, J.; Wen, Y.; Li, Z.; Xu, C.; He, K.; Zhang, P.; Wen, G.; Fan, S. Rapid source models of the 2021 Mw 7.4 Maduo, China, earthquake inferred from high-rate BDS3/2, GPS, Galileo and GLONASS observations. J. Geod. 2022, 96, 58. [Google Scholar] [CrossRef]
- Xu, X.; Yeats, R.; Yu, G. Five Short Historical Earthquake Surface Ruptures near the Silk Road, Gansu Province, China. Bull. Seismol. Soc. Am. 2010, 100, 541–561. [Google Scholar] [CrossRef]
- Guo, P.; Han, Z.; Jiang, W.; Mao, Z. Holocene Left-Lateral Slip Rate of the Lenglongling Fault, Northeastern Margin of the Tibetan Plateau. Seismol. Geol. 2017, 39, 323–341. [Google Scholar] [CrossRef]
- He, X.; Zhang, Y.; Shen, X.; Zheng, W.; Zhang, P.; Zhang, D. Examination of the Repeatability of Two Ms6.4 Menyuan Earthquakes in Qilian-Haiyuan Fault Zone (NE Tibetan Plateau) Based on Source Parameters. Phys. Earth Planet. Inter. 2020, 299, 106408. [Google Scholar] [CrossRef]
- Pan, J.; Li, H.; CHEVALIER, M.; Liu, D.; Li, C.; Liu, F.; Wu, Q.; Lu, H.; Jiao, L. Coseismic Surface Ruptures and Seismogenic structure of the 2022 Ms6.9 Menyuan Earthquake, Qinghai Province. China. Acta Geol. Sin. 2022, 96, 215–231. [Google Scholar] [CrossRef]
- Li, Z.; Gai, H.; Li, X.; Yuan, D.; Xie, H.; Jiang, W.; Li, Y.; Su, Q. Seismogenic Fault and Coseismic Surface Deformation of the Menyuan Ms6.9 Earthquake in Qinghai. China Acta Geol. Sin. 2022, 96, 330–335. [Google Scholar] [CrossRef]
- Yang, H.; Wang, D.; Guo, R.; Xie, M.; Zang, Y.; Wang, Y.; Yao, Q.; Cheng, C.; An, Y.; Zhang, Y. Rapid Report of the 8 January 2022 Ms6.9 Menyuan Earthquake, Qinghai, China. Earthq. Res. Adv. 2022, 2, 100113. [Google Scholar] [CrossRef]
- Liu, J.; Hu, J.; Li, Z.; Ma, Z.; Shi, J.; Xu, W.; Sun, Q. Three-Dimensional Surface Displacements of the 8 January 2022 Mw6.7 Menyuan Earthquake, China from Sentinel-1 and ALOS-2 SAR Observations. Remote Sens. 2022, 14, 1404. [Google Scholar] [CrossRef]
- Li, Z.; Han, B.; Liu, Z.; Zhang, M.; Yu, C.; Chen, B.; Liu, H.; Du, J.; Zhang, S.; Zhu, W.; et al. Source Parameters and Slip Distributions of the 2016 and 2022 Menyuan, Qinghai Earthquakes Constrained by InSAR Observations. Geomat. Inf. Sci. Wuhan Univ. 2022, 47, 887–897. [Google Scholar] [CrossRef]
- Feng, W.; He, X.; Zhang, Y.; Fang, L.; Samsonov, S.; Zhang, P. Seismic Faults of the 2022 Mw6.6 Menyuan, Qinghai Earthquake and Their Implication for the Regional Seismogenic Structures. Chin. Sci. Bull. 2022. [Google Scholar] [CrossRef]
- Fan, L.; Li, B.; Liao, S.; Jiang, C.; Fang, L. Precise Earthquake Sequence Relocation of the January 8, 2022, Qinghai Menyuan Ms6.9 Earthquake. Earthq. Sci. 2022, 35, 138–145. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, G.; Liang, S.; Zou, L. Spatial Migration Characteristics of the Aftershock Sequence of the Menyuan, Qinghai Ms6.9 Earthquake in 2022. Chin. Earthq. Eng. J. 2022, 44, 475–487. [Google Scholar] [CrossRef]
- Xu, Y.; Guo, X.; Feng, L. Relocation and Focal Mechanism Solutions of the MS6.9 Menyuan Earthquake Sequence on January 8, 2022 in Qinghai Province. Acta Seismol. Sin. 2022, 44, 195–210. [Google Scholar] [CrossRef]
- Zumberge, J.; Heflin, M.; Jefferson, D.; Watkins, M.; Webb, F. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Boehm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global Mapping Function (GMF): A New Empirical Mapping Function Based on Numerical Weather Model Data. Geophys. Res. Lett. 2006, 33, L07304. [Google Scholar] [CrossRef] [Green Version]
- Kouba, J. A Guide to Using International GNSS Service (IGS) Products. Available online: https://kb.igs.org/hc/en-us/articles/201271873-A-Guide-to-Using-the-IGS-Products (accessed on 2 September 2022).
- Wang, R.; Martin, F.; Roth, F. Computation of deformation induced by earthquakes in a multi-layered elastic crust: FORTRAN programs EDGRN/EDCMP. Comput. Geosci. 2003, 29, 195–207. [Google Scholar] [CrossRef]
- Wells, D.; Coppersmith, K. New empirical relationships among magnitude, rupture length, rupture width, rupture area, and surface displacement. Bull. Seismol. Soc. Am. 1994, 84, 974–1002. [Google Scholar] [CrossRef]
- Okada, Y. Surface deformation due to shear and tensile faults in a half-space. Bull. Seismol. Soc. Am. 1985, 75, 1135–1154. [Google Scholar] [CrossRef]
- Crowell, B.; Schmidt, D.; Bodin, P.; Vidale, J.; Gomberg, J.; Renate Hartog, J.; Kress, V.; Melbourne, T.; Santillan, M.; Minson, S.; et al. Demonstration of the Cascadia G-FAST geodetic earthquake early warning system for the Nisqually, Washington, earthquake. Seismol. Res. Lett. 2016, 87, 930–943. [Google Scholar] [CrossRef]
- Yin, X.; Qiu, J.; Li, M.; Xu, K.; Zhang, B.; Zhang, S. Three-dimensional velocity structure and seismogenic mechanism of Menyuan MS6.9 earthquake in 2022. Chin. Earthq. Eng. J. 2022, 44, 360–369. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Solutions | Nodal Plane 1 Strike1°/Dip1°/Rake1° | Nodal Plane 2 Strike2°/Dip2°/Rake2° |
|---|---|---|
| USGS 1 | 104/88/15 | 13/75/178 |
| GCMT 1 | 104/82/1 | 14/89/172 |
| CPPT 1 | 285/84/−5 | 15/85/−174 |
| GFZ 1 | 285/82/16 | 193/74/172 |
| IPGP 1 | 284/89/−2 | 14/88/−179 |
| fastCMT at 40 s | 281/83/−24 | 15/66/−172 |
| fastCMT at 60 s | 285/80/−30 | 21/61/−168 |
| fastCMT at 80 s | 285/73/−43 | 30/50/−158 |
| fastCMT at 100 s | 282/73/−43 | 27/50/−157 |
| Origin | A | B | C |
|---|---|---|---|
| Crowell et al., 2016 [59] | −6.687 | 1.500 | −0.214 |
| Melgar et al., 2015 [23] | −4.434 | 1.047 | −0.138 |
| Ruhl et al., 2018 [24] | −5.919 | 1.009 | −0.145 |
| Depth (km) | −3 | 0 | 5 | 10 | 15 | 20 | 25 | 35 | 45 |
|---|---|---|---|---|---|---|---|---|---|
| Vp (km/s) | 0.28 | 3.72 | 4.76 | 5.44 | 5.56 | 5.9 | 5.99 | 6.05 | 6.14 |
| Vs (km/s) | 0.36 | 2.77 | 2.67 | 3.34 | 3.41 | 3.07 | 3.63 | 3.74 | 4.05 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Zang, J.; Fan, S.; Wen, Y.; Xu, C.; Yang, F.; Peng, X.; Zhao, L.; Zhou, X. Real-Time Source Modeling of the 2022 Mw 6.6 Menyuan, China Earthquake with High-Rate GNSS Observations. Remote Sens. 2022, 14, 5378. https://doi.org/10.3390/rs14215378
Li Z, Zang J, Fan S, Wen Y, Xu C, Yang F, Peng X, Zhao L, Zhou X. Real-Time Source Modeling of the 2022 Mw 6.6 Menyuan, China Earthquake with High-Rate GNSS Observations. Remote Sensing. 2022; 14(21):5378. https://doi.org/10.3390/rs14215378
Chicago/Turabian StyleLi, Zhicai, Jianfei Zang, Shijie Fan, Yangmao Wen, Caijun Xu, Fei Yang, Xiuying Peng, Lijiang Zhao, and Xing Zhou. 2022. "Real-Time Source Modeling of the 2022 Mw 6.6 Menyuan, China Earthquake with High-Rate GNSS Observations" Remote Sensing 14, no. 21: 5378. https://doi.org/10.3390/rs14215378