
Analysis of Canopy Gaps of Coastal Broadleaf Forest Plantations in Northeast Taiwan Using UAV Lidar and the Weibull Distribution


Abstract
:1. Introduction
2. Materials and Methods
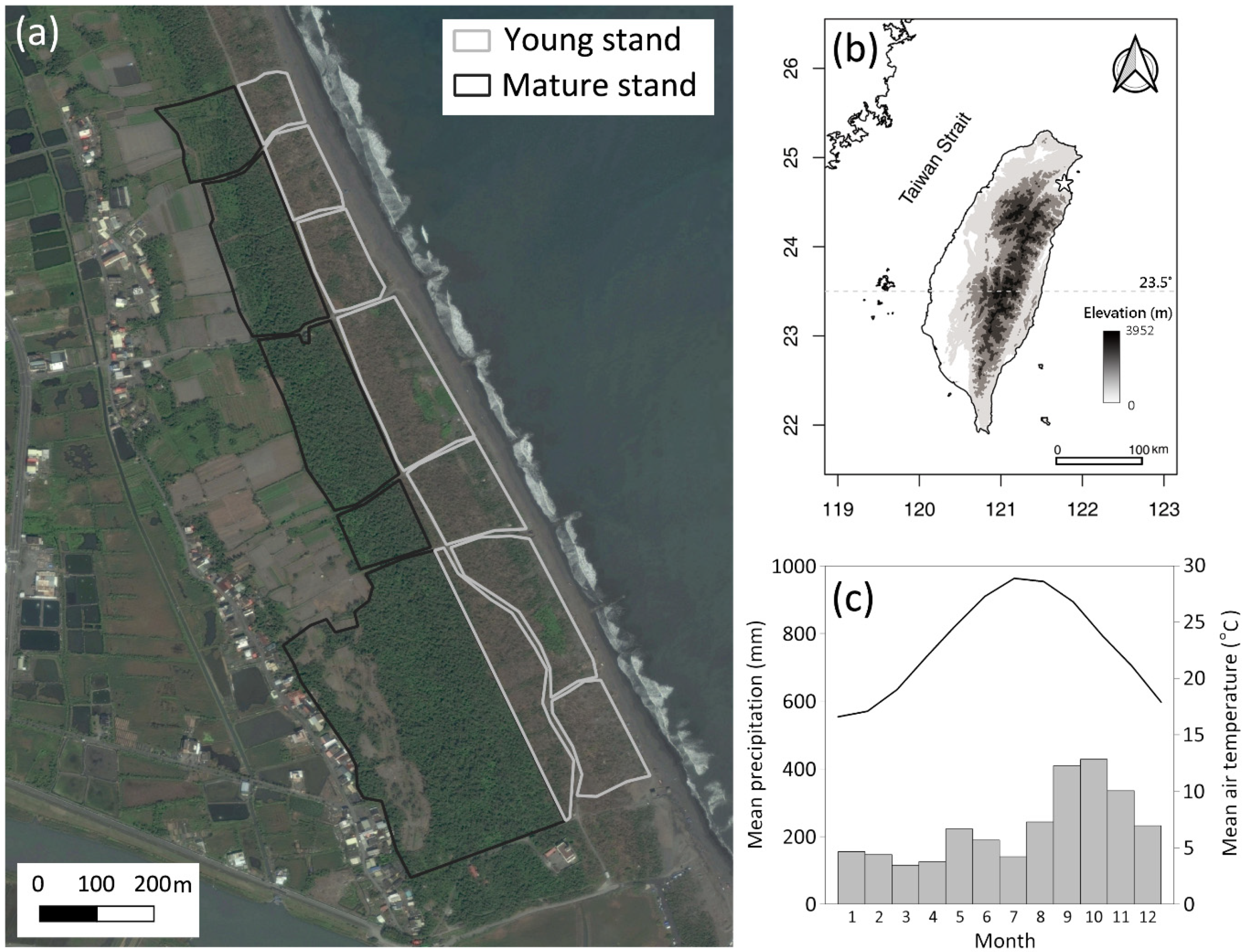
2.1. Study Site
2.2. UAV Data Acquisition
2.3. Gap Detection
2.4. Modeling Canopy Gap Distribution
3. Results
3.1. Canopy Height Model Characteristics
3.2. Gap Characteristics
3.3. Zeta and Weibull Distributions
3.4. Gap Size Distributions across Spatial Extents
4. Discussion
4.1. Canopy Gap Delineation Using UAVlidar and UAVphoto
4.2. Canopy Gap Structure Status
4.3. Effects of Detected Areas
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Denslow, J. Gap partitioning among tropical rainforest trees. Biotropica 1980, 12, 47–55. [Google Scholar] [CrossRef]
- Sommerfeld, R.A.; Lundquist, J.E.; Smith, J. Characterizing the canopy gap structure of a disturbed forest using the Fourier transform. For. Ecol. Manag. 2000, 128, 101–108. [Google Scholar] [CrossRef]
- Turner, M.G. Disturbance and landscape dynamics in a changing world. Ecology 2010, 91, 2833–2849. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Asner, G.P.; Kellner, J.R.; Kennedy-Bowdoin, T.; Knapp, D.E.; Anderson, C.; Martin, R.E. Forest canopy gap distributions in the southern Peruvian Amazon. PLoS ONE 2013, 8, e60875. [Google Scholar] [CrossRef] [Green Version]
- Seidel, D.; Ammer, C.; Puettmann, K. Describing forest canopy gaps efficiently, accurately, and objectively: New prospects through the use of terrestrial laser scanning. Agric. For. Meteorol. 2015, 213, 23–32. [Google Scholar] [CrossRef]
- White, J.C.; Tompalski, P.; Coops, N.C.; Wulder, M.A. Comparison of airborne laser scanning and digital stereo imagery for characterizing forest canopy gaps in coastal temperate rainforests. Remote Sens. Environ. 2018, 208, 1–14. [Google Scholar] [CrossRef]
- Mazdi, R.A.; Mataji, A.; Fallah, A. Canopy gap dynamics, disturbances, and natural regeneration patterns in a beechdominated Hyrcanian old-growth forest. Balt. For. 2021, 27, 535. [Google Scholar] [CrossRef]
- Sapkota, I.P.; Odén, P.C. Gap characteristics and their effects on regeneration, dominance and early growth of woody species. J. Plant Ecol. 2009, 2, 21–29. [Google Scholar] [CrossRef] [Green Version]
- Yamamoto, S.-I. Forest gap dynamics and tree regeneration. J. For. Res. 2000, 5, 223–229. [Google Scholar] [CrossRef]
- Panayotov, M.; Kulakowski, D.; Dos Santo, L.L.; Bebi, P. Wind disturbances shape old Norway spruce-dominated forest in Bulgaria. For. Ecol. Manag. 2011, 262, 470–481. [Google Scholar] [CrossRef]
- Gray, A.N.; Spies, T.A.; Pabst, R.J. Canopy gaps affect long-term patterns of tree growth and mortality in mature and old-growth forests in the Pacific Northwest. For. Ecol. Manag. 2012, 281, 111–120. [Google Scholar] [CrossRef]
- Attiwill, P.M. The disturbance of forest ecosystems: The ecological basis for conservative management. For. Ecol. Manag. 1994, 63, 247–300. [Google Scholar] [CrossRef]
- Kern, C.C.; Burton, J.I.; Raymond, P.; D’Amato, A.W.; Keeton, W.S.; Royo, A.A.; Walters, M.B.; Webster, C.R.; Willis, J.L. Challenges facing gap-based silviculture and possible solutions for mesic northern forests in North America. Forestry 2017, 90, 4–17. [Google Scholar] [CrossRef]
- Amiri, M.; Rahmani, R.; Sagheb-Talebi, K.H. Canopy gaps characteristics and structural dynamics in a natural unmanaged oriental beech (Fagus orientalis Lipsky) stand in the north of Iran. Casp. J. Environ. Sci. 2015, 13, 259–274. [Google Scholar]
- Brokaw, N.V. The definition of treefall gap and its effect on measures of forest dynamics. Biotropica 1982, 14, 158–160. [Google Scholar] [CrossRef]
- Clinton, B.D.; Baker, C.R. Catastrophic windthrow in the southern Appalachians: Charcteristics of pits and mounds and initial vegetation responses. For. Ecol. Manag. 2000, 126, 51–60. [Google Scholar] [CrossRef] [Green Version]
- Hart, J.L.; Grissino-Mayer, H.D. Gap-scale disturbance processes in secondary hardwood stands on the Cumberland Plateau, Tennessee, USA. Plant Ecol. 2009, 201, 131–146. [Google Scholar] [CrossRef]
- Kucbel, S.; Jaloviar, P.; Saniga, M.; Vencurik, J.; Klimas, V. Canopy gaps in an old-growth fir-beech forest remnant of Western Carpathians. Eur. J. For. Res. 2010, 129, 249–259. [Google Scholar] [CrossRef]
- Yao, A.-W.; Chiang, J.-M.; McEwan, R.; Lin, T.-C. The effect of typhoon-related defoliation on the ecology of gap dynamics in a subtropical rain forest of Taiwan. J. Veg. Sci. 2015, 26, 145–154. [Google Scholar] [CrossRef]
- Salvador-Van Eysenrode, D.; Bogaert, J.; Van Hecke, P.; Impens, I. Influence of tree-fall orientation on canopy gap shape in an Ecuadorian rain forest. J. Trop. Ecol. 1998, 14, 865–869. [Google Scholar] [CrossRef]
- Li, K.; Huang, X.; Zhang, J.; Sun, Z.; Huang, J.; Sun, C.; Xie, Q.; Song, W. A new method for forest canopy hemispherical photography segmentation based on deep learning. Forests 2020, 11, 1366. [Google Scholar] [CrossRef]
- Moura, Y.M.; Balzter, H.; Galvão, L.S.; Dalagnol, R.; Espírito-Santo, F.; Santos, E.G.; Garcia, M.; Bispo, P.d.C.; Oliveira, R.C.; Shimabukuro, Y.E. Carbon dynamics in a human-modified tropical forest: A case study using multi-temporal LiDAR data. Remote Sens. 2020, 12, 430. [Google Scholar] [CrossRef] [Green Version]
- Lefsky, M.A.; Cohen, W.B.; Parker, G.G.; Harding, D.J. Lidar remote sensing for ecosystem studies. BioScience 2002, 52, 19–30. [Google Scholar] [CrossRef]
- Saatchi, S.S.; Harris, N.L.; Brown, S.; Lefsky, M.; Mitchard, E.T.A.; Salas, W.; Zutta, B.R.; Buermann, W.; Lewis, S.L.; Hagen, S.; et al. Benchmark map of forest carbon stocks in tropical regions across three continents. Proc. Natl. Acad. Sci. USA 2011, 108, 9899–9904. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lai, G.-Y.; Liu, H.-C.; Chung, C.-H.; Wang, C.-K.; Huang, C.-y. Lidar-derived environmental drivers of epiphytic bryophyte biomass in tropical montane cloud forests. Remote Sens. Environ. 2021, 253, 112166. [Google Scholar] [CrossRef]
- Chung, C.-H.; Wang, C.-H.; Hsieh, H.-C.; Huang, C.-y. Comparison of forest canopy height profiles in a mountainous region of Taiwan derived from airborne lidar and unmanned aerial vehicle imagery. GISci. Remote Sens. 2019, 56, 1289–1304. [Google Scholar] [CrossRef]
- Chung, C.-H.; Huang, C.-y. Hindcasting tree heights in tropical forests using time-series unmanned aerial vehicle imagery. Agric. For. Meteorol. 2020, 290, 108029. [Google Scholar] [CrossRef]
- Getzin, S.; Nuske, R.S.; Wiegand, K. Using Unmanned Aerial Vehicles (UAV) to Quantify Spatial Gap Patterns in Forests. Remote Sens. 2014, 6, 6988–7004. [Google Scholar] [CrossRef] [Green Version]
- Silva, C.A.; Valbuena, R.; Pinagé, E.R.; Mohan, M.; de Almeida, D.R.; North Broadbent, E.; Mohd Jaafar, W.S.W.; de Almeida Papa, D.; Cardil, A.; Klauberg, C. ForestGapR: An R package for forest gap analysis from canopy height models. Methods Ecol. Evol. 2019, 10, 1347–1356. [Google Scholar] [CrossRef] [Green Version]
- Kuželka, K.; Slavík, M.; Surový, P. Very High Density Point Clouds from UAV Laser Scanning for Automatic Tree Stem Detection and Direct Diameter Measurement. Remote Sens. 2020, 12, 1236. [Google Scholar] [CrossRef] [Green Version]
- Jaakkola, A.; Hyyppä, J.; Kukko, A.; Yu, X.; Kaartinen, H.; Lehtomäki, M.; Lin, Y. A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS J. Photogramm. Remote Sens. 2010, 65, 514–522. [Google Scholar] [CrossRef]
- Lin, Y.-C.; Cheng, Y.-T.; Zhou, T.; Ravi, R.; Hasheminasab, S.M.; Flatt, J.E.; Troy, C.; Habib, A. Evaluation of UAV LiDAR for mapping coastal environments. Remote Sens. 2019, 11, 2893. [Google Scholar] [CrossRef] [Green Version]
- Resop, J.P.; Lehmann, L.; Hession, W.C. Quantifying the Spatial Variability of Annual and Seasonal Changes in Riverscape Vegetation Using Drone Laser Scanning. Drones 2021, 5, 91. [Google Scholar] [CrossRef]
- Bonnet, S.; Gaulton, R.; Lehaire, F.; Lejeune, P. Canopy gap mapping from airborne laser scanning: An assessment of the positional and geometrical accuracy. Remote Sens. 2015, 7, 11267–11294. [Google Scholar] [CrossRef] [Green Version]
- Goulamoussène, Y.; Bedeau, C.; Descroix, L.; Linguet, L.; Hérault, B. Environmental control of natural gap size distribution in tropical forests. Biogeosciences 2017, 14, 353–364. [Google Scholar] [CrossRef] [Green Version]
- Fisher, J.I.; Hurtt, G.C.; Thomas, R.Q.; Chambers, J.Q. Clustered disturbances lead to bias in large-scale estimates based on forest sample plots. Ecol. Lett. 2008, 11, 554–563. [Google Scholar] [CrossRef]
- Jucker, T. Deciphering the fingerprint of disturbance on the three-dimensional structure of the world’s forests. New Phytol. 2022, 233, 612–617. [Google Scholar] [CrossRef]
- Weibull, W. Statistical theory of the strength of materials. Proc. Roy. Swedish Inst. Eng. Res. 1939, 151, 1–45. [Google Scholar]
- Weibull, W. Statistical distribution functions of wide applicability. J. Appl. Mech. 1951, 18, 293–297. [Google Scholar] [CrossRef]
- McCrum, W.R.; Sharp, J.T.; Bluhm, G.B. Use of the Weibull distribution for analysis of a clinical therapeutic study in rheumatoid arthritis. Henry Hosp. Med. J. 1976, 24, 173–182. [Google Scholar]
- Evans, J.; Kretschmann, D.; Green, D. Procedures for Estimation of Weibull Parameters; Gen. Tech. Rep. FPL-GTR-264; US Department of Agriculture, Forest Service, Forest Products Laboratory: Madison, WI, USA, 2019. [Google Scholar] [CrossRef]
- Phadnis, M.A.; Sharma, P.; Thewarapperuma, N.; Chalise, P. Assessing accuracy of Weibull shape parameter estimate from historical studies for subsequent sample size calculation in clinical trials with time-to-event outcome. Contemp. Clin. Trials Commun. 2020, 17, 100548. [Google Scholar] [CrossRef]
- Hu, T.; Sun, X.; Su, Y.; Guan, H.; Sun, Q.; Kelly, M.; Guo, Q. Development and Performance Evaluation of a Very Low-Cost UAV-Lidar System for Forestry Applications. Remote Sens. 2021, 13, 77. [Google Scholar] [CrossRef]
- Zhang, X.; Bao, Y.; Wang, D.; Xin, X.; Ding, L.; Xu, D.; Hou, L.; Shen, J. Using UAV LiDAR to Extract Vegetation Parameters of Inner Mongolian Grassland. Remote Sens. 2021, 13, 656. [Google Scholar] [CrossRef]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A Photogrammetric Workflow for the Creation of a Forest Canopy Height Model from Small Unmanned Aerial System Imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef] [Green Version]
- Kellner, J.R.; Asner, G.P. Convergent structural responses of tropical forests to diverse disturbance regimes. Ecol. Lett. 2009, 12, 887–897. [Google Scholar] [CrossRef]
- Runkle, J.R. Patterns of disturbance of disturbance in some old-growth mesic forests of eastern North America. Ecology 1982, 63, 1533–1546. [Google Scholar] [CrossRef] [Green Version]
- Hix, D.M.; Helfrich, K.K. Gap characteristics of southeastern Ohio second-growth forests. Gen. Tech. Rep. NC 1981, 234, 247–253. [Google Scholar]
- Marvin, D.C.; Asner, G.P.; Knapp, D.E.; Anderson, C.B.; Martin, R.E.; Sinca, F.; Tupayachi, R. Amazonian landscapes and the bias in field studies of forest structure and biomass. Proc. Natl. Acad. Sci. USA 2014, 111, E5224–E5232. [Google Scholar] [CrossRef] [Green Version]
- Hanel, R.; Corominas-Murtra, B.; Liu, B.; Thurner, S. Fitting power-laws in empirical data with estimators that work for all exponents. PLoS ONE 2017, 12, e0170920. [Google Scholar] [CrossRef] [Green Version]
- Lloyd, J.; Gloor, E.U.; Lewis, S.L. Are the dynamics of tropical forests dominated by large and rare disturbance events? Ecol. Lett. 2009, 12, 19–21. [Google Scholar] [CrossRef]
- Vose, J.M. Patterns of leaf area distribution within crowns of nitrogen-and phosphorus-fertilized loblolly pine trees. For. Sci. 1988, 34, 564–573. [Google Scholar]
- Maltamo, M.; Kangas, A.; Uuttera, J.; Torniainen, T.; Saramäki, J. Comparison of percentile based prediction methods and the Weibull distribution in describing the diameter distribution of heterogeneous Scots pine stands. For. Ecol. Manag. 2000, 133, 263–274. [Google Scholar] [CrossRef]
- Lovell, J.L.; Jupp, D.L.; Culvenor, D.S.; Coops, N.C. Using airborne and ground based ranging lidar to measure canopy structure in Australian forests. Can. J. Remote Sens. 2003, 29, 607–622. [Google Scholar] [CrossRef]
- Nijland, W.; Coops, N.C.; Macdonald, S.E.; Nielsen, S.E.; Bater, C.W.; Stadt, J.J. Comparing patterns in forest stand structure following variable harvests using airborne laser scanning data. For. Ecol. Manag. 2015, 354, 272–280. [Google Scholar] [CrossRef]
- Dinno, A. Nonparametric pairwise multiple comparisons in independent groups using Dunn’s test. Stata J. 2015, 15, 292–300. [Google Scholar] [CrossRef] [Green Version]
- Hobi, M.L.; Ginzler, C.; Commarmot, B.; Bugmann, H. Gap pattern of the largest primeval beech forest of Europe revealed by remote sensing. Ecosphere 2015, 6, 76. [Google Scholar] [CrossRef] [Green Version]
- Guimarães, N.; Pádua, L.; Marques, P.; Silva, N.; Peres, E.; Sousa, J.J. Forestry remote sensing from unmanned aerial vehicles: A review focusing on the data, Processing and Potentialities. Remote Sens. 2020, 12, 1046. [Google Scholar] [CrossRef] [Green Version]
- Vastaranta, M.; Wulder, M.A.; White, J.C.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Kankare, V.; Holopainen, M.; Hyyppa, J.; Hyyppa, H. Airborne laser scanning and digital stereo imagery measures of forest structure: Comparative results and implications to forest mapping and inventory update. Can. J. Remote Sens. 2013, 39, 382–395. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef] [Green Version]
- Kellner, J.R.; Armston, J.; Birrer, M. New opportunities for forest remote sensing through ultra-high-density drone lidar. Surv. Geophys. 2019, 40, 959–977. [Google Scholar] [CrossRef] [Green Version]
- Jarron, L.R.; Coops, N.C.; MacKenzie, W.H.; Tompalski, P.; Dykstra, P. Detection of sub-canopy forest structure using airborne LiDAR. Remote Sens. Environ. 2020, 244, 111770. [Google Scholar] [CrossRef]
- Franklin, J.F.; Mitchell, R.J.; Palik, B.J. Natural Disturbance and Stand Development Principles for Ecological Forestry; Gen. Tech. Rep. NRS-19; US Department of Agriculture, Forest Service, Northern Research Station: Newtown Square, PA, USA, 2007. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.-C.; Hamburg, S.P.; Lin, K.-C.; Wang, L.-J.; Chang, C.-T.; Hsia, Y.-J.; Vadeboncoeur, M.A.; Mabry McMullen, C.M.; Liu, C.-P. Typhoon disturbance and forest dynamics: Lessons from a northwest Pacific subtropical forest. Ecosystems 2011, 14, 127–143. [Google Scholar] [CrossRef]
- Dasgupta, R. Characterization theorems for Weibull distribution with applications. J. Environ. Stat. 2014, 6, 1–25. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Forest Type | Mean | SD | Median | Min | Max | Skewness | Kurtosis | W |
|---|---|---|---|---|---|---|---|---|---|
| CHMlidar | Young | 1.2 a | 0.9 | 0.6 a | 0.0 | 11.6 | 1.62 | 5.98 | 0.81 |
| Mature | 4.0 b | 2.4 | 3.7 b | 0.0 | 16.8 | 0.68 | 3.38 | 0.97 | |
| CHMphoto | Young | 1.4 a | 1.1 | 1.1 a | 0.0 | 10.3 | 0.74 | 3.19 | 0.96 |
| Mature | 4.6 b | 2.2 | 4.5 b | 0.0 | 17.5 | 0.21 | 3.16 | 0.99 |
| Sensor | Forest Type | b0 | b1 | R2 |
|---|---|---|---|---|
| Lidar | Young | −26.41 | 0.92 | 0.99 |
| Mature | −4.41 | 0.94 | 0.97 | |
| Photograph | Young | −15.12 | 0.85 | 0.97 |
| Mature | −65.08 | 0.75 | 0.94 |
| GAP Type | Forest Type | Gap Number | Mean Gap Size (SD, m2) | W |
|---|---|---|---|---|
| GAPlidar | Young | 165 | 1392.9 (4298.8) | 0.18 |
| Mature | 748 | 74.0 (311.9) | 0.12 | |
| GAPphoto | Young | 128 | 491.3 (1778.7) | 0.29 |
| Mature | 154 | 65.9 (99.2) | 0.57 |
| Sensor | Forest Type | Weibull Distribution Parameters | ||
|---|---|---|---|---|
| Shape | Scale | p50 | ||
| Lidar | Young | 0.3 | 426.3 | 185.7 |
| Lidar | Mature | 0.6 | 41.0 | 23.1 |
| Photograph | Young | 0.5 | 181.4 | 85.4 |
| Photograph | Mature | 0.9 | 51.3 | 39.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chung, C.-H.; Wang, J.; Deng, S.-L.; Huang, C.-y. Analysis of Canopy Gaps of Coastal Broadleaf Forest Plantations in Northeast Taiwan Using UAV Lidar and the Weibull Distribution. Remote Sens. 2022, 14, 667. https://doi.org/10.3390/rs14030667
Chung C-H, Wang J, Deng S-L, Huang C-y. Analysis of Canopy Gaps of Coastal Broadleaf Forest Plantations in Northeast Taiwan Using UAV Lidar and the Weibull Distribution. Remote Sensing. 2022; 14(3):667. https://doi.org/10.3390/rs14030667
Chicago/Turabian StyleChung, Chih-Hsin, Jonathan Wang, Shu-Lin Deng, and Cho-ying Huang. 2022. "Analysis of Canopy Gaps of Coastal Broadleaf Forest Plantations in Northeast Taiwan Using UAV Lidar and the Weibull Distribution" Remote Sensing 14, no. 3: 667. https://doi.org/10.3390/rs14030667
APA StyleChung, C.-H., Wang, J., Deng, S.-L., & Huang, C.-y. (2022). Analysis of Canopy Gaps of Coastal Broadleaf Forest Plantations in Northeast Taiwan Using UAV Lidar and the Weibull Distribution. Remote Sensing, 14(3), 667. https://doi.org/10.3390/rs14030667