1. Introduction
Interferometric synthetic aperture radar (InSAR) is becoming increasingly important in the field of remote sensing and has been successfully applied in topography mapping and deformation monitoring [
1,
2,
3,
4,
5]. In the InSAR data processing pipeline, the interferometric phase is formed by two or more SAR complex images acquired at different viewing angles or at different times. Due to the influence of system thermal noise, time decorrelation, baseline decorrelation, and other decorrelation factors, noise is inevitably introduced into the interferometric phase [
6]. The presence of noise increases the difficulty of the subsequent phase unwrapping process, and may even lead to the failure of phase unwrapping; therefore, accurate interferometric phase filtering is an essential step.
In recent decades, many interferometric phase-filtering methods have been proposed and can generally be divided into three categories: spatial domain methods [
7,
8,
9]; transform domain methods [
10,
11,
12]; and nonlocal methods [
13,
14,
15]. The basic idea of most spatial domain and transform domain methods is to filter out noise through the window processing of local neighboring pixels in the image spatial domain or transform domain, such as the well-established Lee filter [
7] and Goldstein filter [
10]. In these two types of methods, the inherent nonlocal (NL) self-similarity of interferometric phase images has not been utilized. The nonlocal self-similarity means that the same phase fringe structure repeatedly appears in different image regions. Taking advantage of this similarity, nonlocal interferometric phase-filtering methods efficiently filter out noise by performing the weighted averaging of similar images patches in recent years, such as NL-InSAR [
13] and InSAR-BM3D filter [
14], and they usually have better filtering performance than the spatial domain and transform domain methods.
Recently, deep convolutional neural networks (DCNNs) have been successfully applied to interferometric phase filtering [
16,
17]. Due to its powerful feature extraction capability, the results of the DCNN-based filtering method are better than those of traditional filtering methods. For example, a deep learning framework for InSAR phase filtering was proposed in [
16], and a phase-filtering method that works via a phase-filtering network (PFNet) based on DCNNs was proposed in [
17]. In these DCNN-based filtering methods, the inherent nonlocal self-similarity property of the interferometric phase was not been taken into account. Inspired by the traditional nonlocal filtering methods, we combined DCNNs with the idea of nonlocal processing, aiming to exploit the advantages of both in interferometric phase filtering to improve the filtering performance.
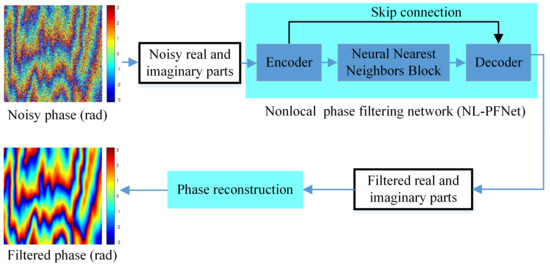
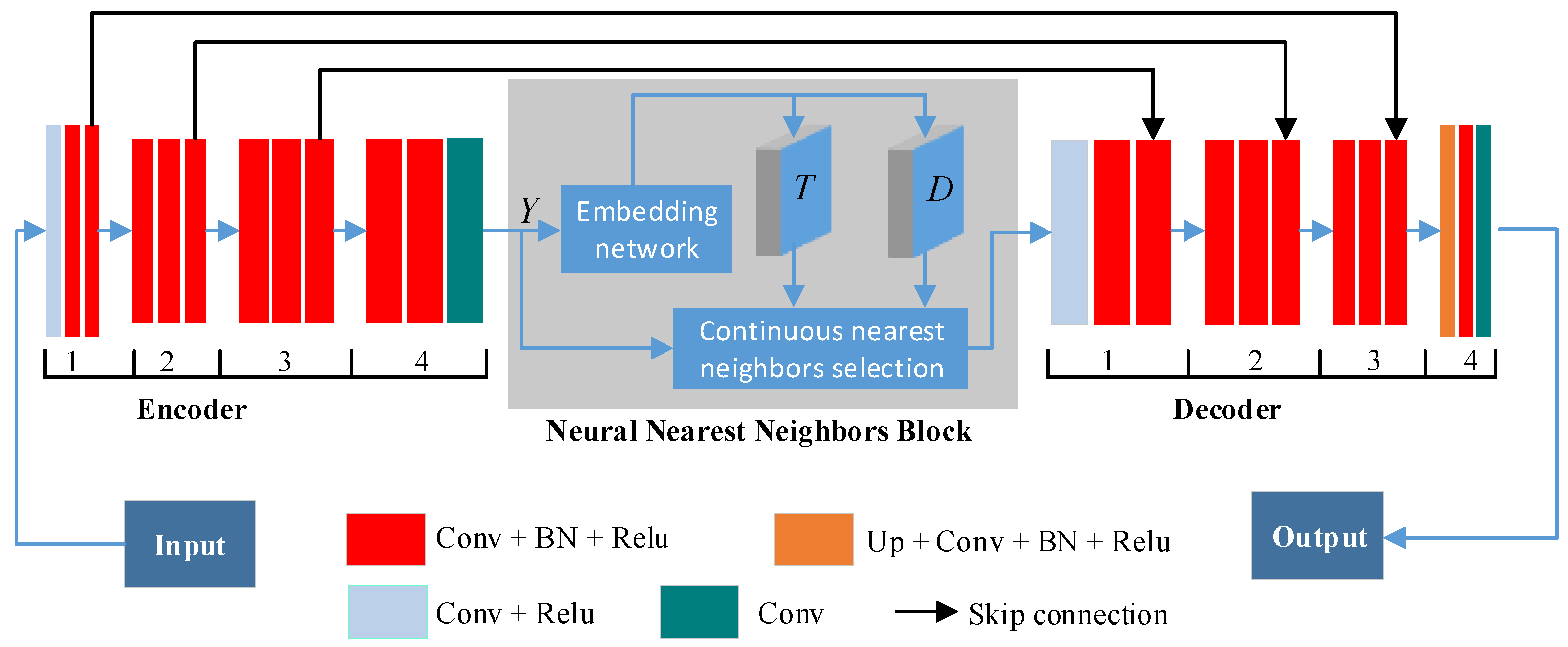
In this paper, we propose a DCNN-based phase-filtering method for InSAR. In this method, a nonlocal phase filtering network (NL-PFNet) is designed based on the encoder–decoder architecture [
18] and nonlocal feature selection strategy [
19]. Thanks to the powerful phase feature extraction ability of the encoder–decoder structure and the utilization of nonlocal phase information, NL-PFNet can predict accurate filtered phase from a large number of interferometric phase images with different noise levels. Experiments both on simulated and real InSAR data show that the proposed method significantly outperforms the three conventional well-established methods and a deep learning-based method.
The remainder of this paper is organized as follows. In
Section 2, we describe the interferometric phase noise model and how to employ neural networks to achieve nonlocal filtering.
Section 3 presents the details of the proposed nonlocal phase-filtering method. In
Section 4, the filtered results of the proposed method on simulated and real InSAR data are presented. Quantitative and qualitative comparisons with four well-established filtering methods using simulated and real data, and a generalization ability analysis of the proposed method are presented in
Section 5.
Section 6 gives conclusions and future work.
2. Review and Analysis
In this section, we will review the phase noise model and analyze how to employ neural networks to achieve nonlocal phase filtering.
2.1. Phase Noise Model
The interferometric phase
is obtained by the conjugate multiplication of two co-registered complex SAR images (
and
), which can be expressed as
where angle (·) denotes a function that returns the phase angle, and ∗ denotes the complex conjugate. The noise level of the interferometric phase is usually evaluated by the amplitude of the correlation coefficient:
where
is the coherence. A higher coherence means a lower noise level, and a coherence value of 1 means that the interferometric phase is noise-free (ideal). An additive noise model of the interferometric phase was proven in [
7] and can be expressed as
where
is the ideal interferometric phase, and
is the zero-mean additive Gaussian noise.
and
are independent variables. The purpose of phase filtering is to estimate
from
.
In the process of interferometric phase filtering, the phase jumps from
to
or
to
should be preserved in order to correctly unwrap the interferometric phase; therefore, the interferometric phase is usually processed in the complex domain. According to [
20], the phase noise model in the complex domain can be expressed as
where
and
are real and imaginary parts of the interferometric phase
;
and
are the zero-mean additive noise; and
is a quality index monotonically increasing with the coherence
. Therefore, the filtering object is converted into the real and imaginary parts rather than the interferometric phase itself. After obtaining the filtered real and imaginary parts, the final filtered interferometric phase can be estimated by
2.2. Problem Analysis
According to (
5), we can use a neural network to predict the filtered real and imaginary parts of the interferometric phase and then calculate the filtered interferometric phase. Following this processing idea, some methods [
16,
17] have successfully used DCNNs to achieve phase filtering and rely on the powerful feature extraction capabilities of DCNNs to obtain a filtering performance beyond traditional phase filtering methods to a certain extent, but these methods are achieved based on local neighboring pixels and only use local phase information. However, interferometric phase images have the property of the nonlocal self-similarity, that is, the similar phase fringe structure appears repeatedly in different image regions. If this self-similarity property can be incorporated into network processing to achieve nonlocal phase filtering, it is expected to further improve the accuracy of phase filtering.
In addition, because the noise in the interferometric phase is affected by many factors, such as system thermal noise, time decorrelation, etc., it has strong spatial variability, that is, the noise level is different in different image regions. The spatial variability of the noise requires that the filtering method can handle the interferometric phase images with different noise levels in a balanced manner, otherwise, the low-coherence area may be under-filtered, and the high-coherence area may be over-filtered. Therefore, we use interferometric images with different noise levels as training data to improve the accuracy of the neural network.
5. Discussion
In this section, we use simulated and real InSAR data to compare the proposed method with the Lee filter, Goldstein filter, InSAR-BM3D filter and PFNet.
5.1. Comparison Experiments on Simulated InSAR Data
Figure 9 shows the filtering results of
Figure 5a and phase error results obtained by the four reference methods. From
Figure 6 and
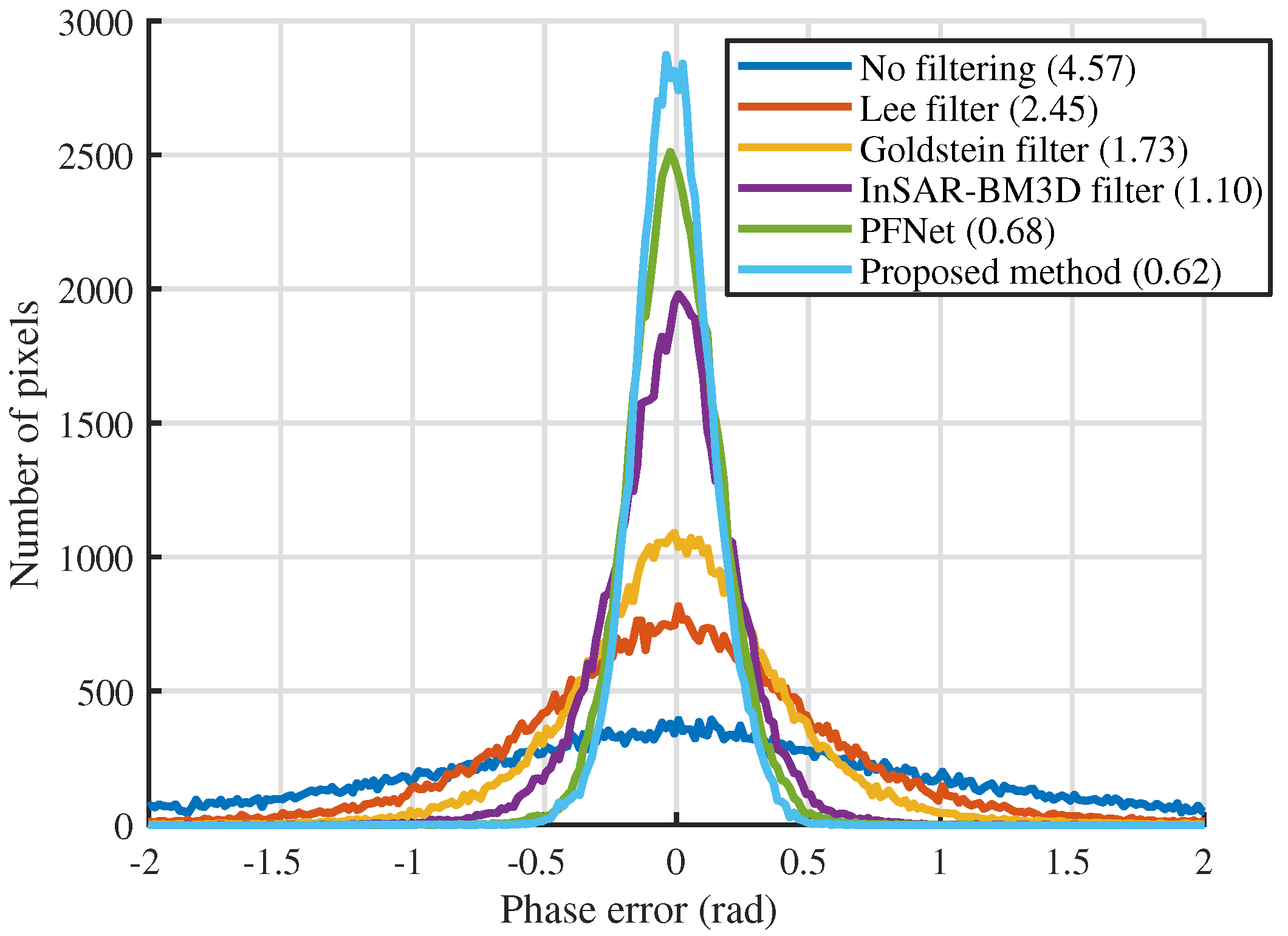
Figure 9, we can see that the phase error of the proposed method is closer to zero than other methods, that is, the filtered phase of the proposed method is closest to the ideal phase. In order to further verify this inference, the fitted histogram curves of the phase errors are given in
Figure 10. The fitted histogram curve can clearly compare the error distribution of various methods. As can be seen from
Figure 10, the error curve of the proposed method is sharper near zero than other methods, that is, the proposed method outperforms other methods from the perspective of phase error.
To verify the performance of the proposed method under different noise levels, the quantitative indexes were calculated for all testing samples with the same coherences, and the results are shown in
Figure 11. From
Figure 11, we can see that the proposed method has the highest MSSIM and lowest MSE among the five methods under all considered cases, that is, the proposed method can obtain the highest filtering performance. In addition, the mean NOR, MSSIM, MSE, and
T of the four reference methods for all testing samples were calculated and listed in
Table 4. From
Table 2 and
Table 4, we can see that the InSAR-BM3D filter, PFNet, and the proposed method have sufficient filtering power to filter out all residues from the perspective of NOR. Among these five methods, the proposed method has the highest MSSIM and the smallest MSE. Compared with the InSAR-BM3D filter and PFNet, the MSSIM of the proposed method is 8% and 3% higher, respectively, and the MSE of the proposed method is 25% and 11% higher, respectively. This indicates that the proposed method has the best filtering performance. In addition, the proposed method has a significant advantage of computational efficiency compared to traditional methods. Compared with PFNet, the proposed method has the same level of running time because the required running time for nonlocal processing is also small when the image size is small.
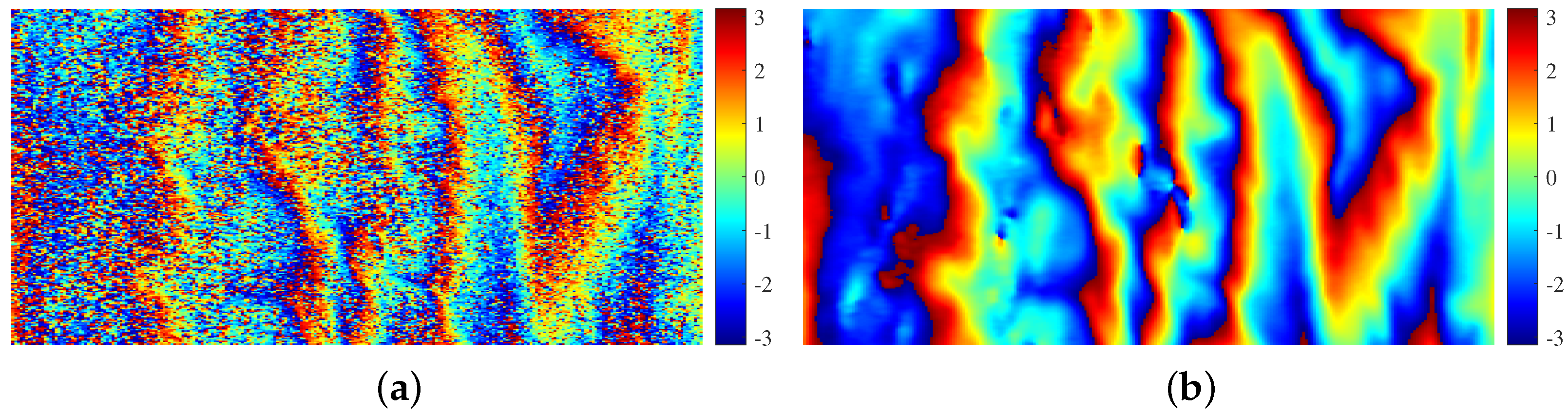
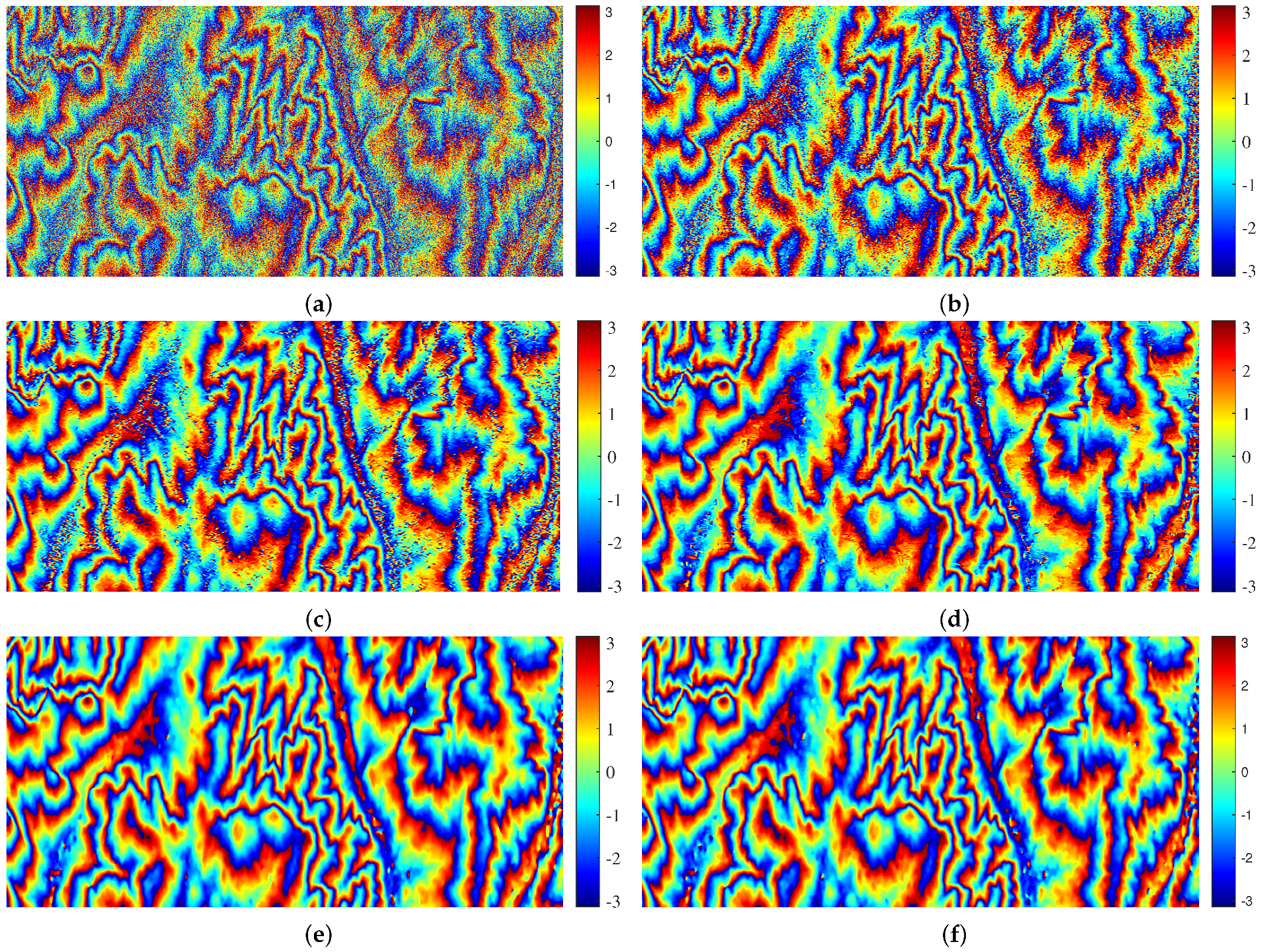
5.2. Comparison Experiments on Real InSAR Data
The filtered results of
Figure 7a obtained by the four reference methods are shown in
Figure 12a–d, respectively. To better observe the filtering effects, a local area (black rectangle in
Figure 7a) and the corresponding filtered results are enlarged in
Figure 13. From
Figure 7,
Figure 8,
Figure 12 and
Figure 13, we can see that compared with PFNet and the proposed method, the denoising power of the Lee filter, Goldstein filter and InSAR-BM3D filter is not enough. Compared with the proposed method, the result of PFNet is over-filtered, that is, more phase detail information is lost. However, the proposed method better balances denoising and phase detail preservation.
For further quantitative analysis, the evaluation indexes of the four reference methods were calculated and listed in
Table 5. From
Table 3 and
Table 5, it can be seen that compared with the Lee filter, Goldstein filter and InSAR-BM3D filter, the PRR and metric
Q of the proposed method and PFNet are significantly higher, which indicates that the proposed method and PFNet have better filtering performance. Comparing the proposed method and PFNet, although the proposed method has a lower PRR, it has a higher metric
Q. This indicates that PFNet loses more phase detail information due to the excessive denoising ability, while the proposed method maintains the balance of denoising and phase detail preservation. Compared with the InSAR-BM3D filter and PFNet, the metric
Q of the proposed method is 25% and 9% higher, respectively. Furthermore, due to the time consumption of nonlocal phase information processing, the running time of the proposed method is higher than PFNet, but still several tens of times less than the Lee filter, Goldstein filter, and InSAR-BM3D filter.
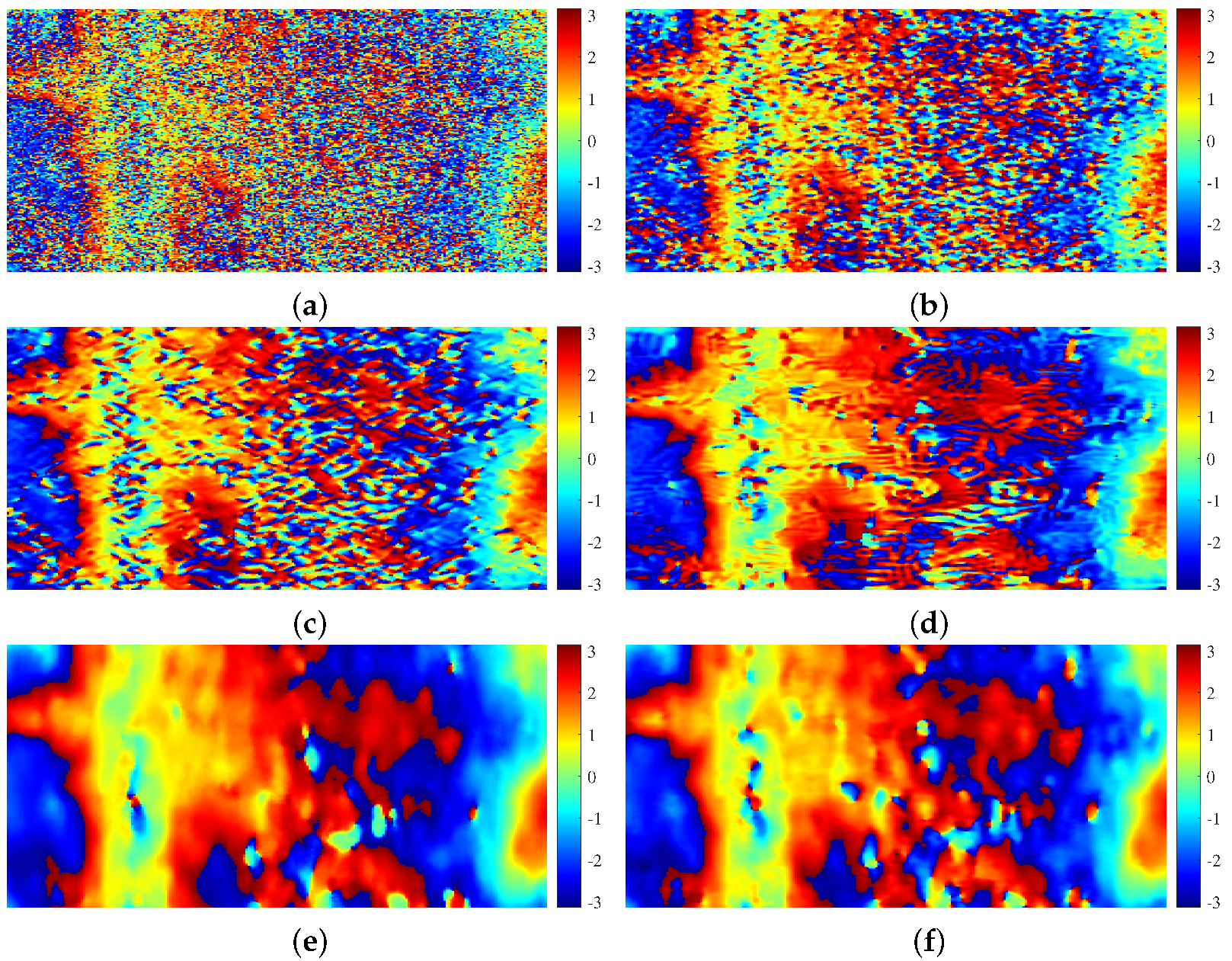
5.3. Generalization Ability to Real InSAR Data
To further analyze the filtering performance of the proposed method for low-coherence areas, a low-coherence region (coherence = 0.44) of
Figure 7a (white rectangle) and the corresponding filtered results obtained by the proposed and reference methods are shown in
Figure 14. For further quantitative analysis, the evaluation indexes of the five methods were calculated and listed in
Table 6. Comparing the proposed method and PFNet, although the proposed method has a lower PRR, it has a higher metric
Q. Compared with the InSAR-BM3D filter and PFNet, the metric
Q of the proposed method is 37% and 19% higher, respectively. Therefore, we can see that the proposed method maintains the balance of denoising and phase detail preservation for the low-coherence area better than the reference methods.
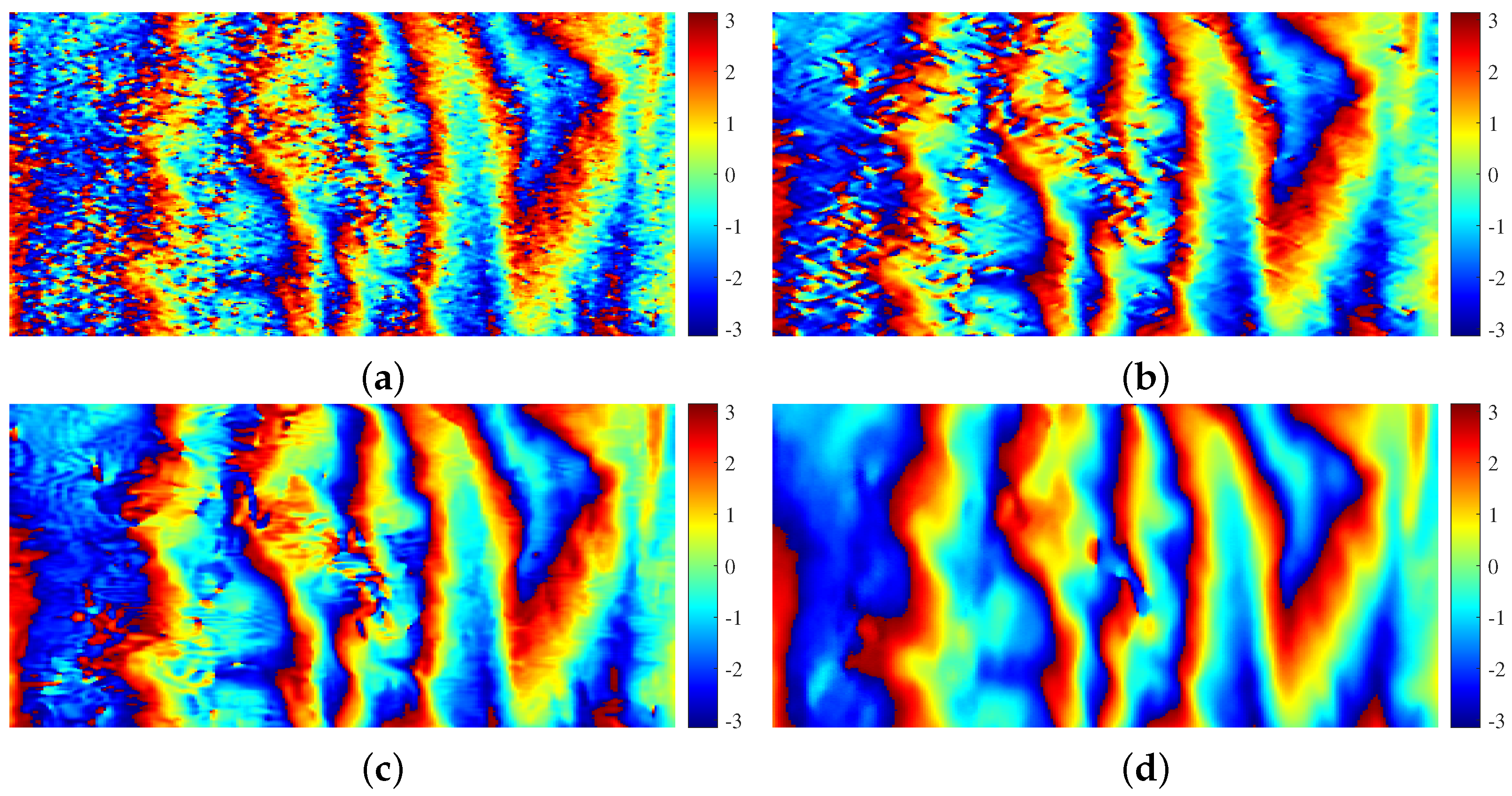
To verify the generalization ability of the proposed method for different studied areas, we processed the real InSAR data with different terrain from the training data. The real interferometric phase image also comes from the interferometric wide swath mode of the Sentinel-1 SAR satellite. The interferometric phase (
pixels, coherence = 0.62) is shown in
Figure 15a. The filtered results obtained by the proposed and reference methods are shown in
Figure 15b–f, respectively. For further quantitative analysis, the evaluation indexes of the five methods were calculated and listed in
Table 7. From
Figure 15 and
Table 7, we can see that the proposed method maintains the balance of denoising and phase detail preservation better than the reference methods. Compared with the InSAR-BM3D filter, the metric
Q of the proposed method is 24% higher. According to
Section 5.2, in the case of the real data with the same terrain as the training data, the improvement of the metric
Q is 25% higher. It can be seen that there is a slight drop in filtering performance when the terrain of the study area is different from that of the training data. Therefore, to a certain extent, the proposed method has good generalization ability to different studied areas in this experiment. In practical applications, the need to regenerate training data and retrain can be determined based on a combination of the three following factors: the required filtering performance, the required training time and whether there is the DEM of the studied area to generate training data. Furthermore, the ambiguity height of the InSAR system directly affects the density of phase fringes related to the filtering performance. Therefore, to enhance the phase feature similarity between simulated and real InSAR data [
24,
25], the ambiguity height used in the process of generating the training data is the same as that of the real InSAR system.
In addition, as with the terrain-induced interferometric phase, the deformation-induced interferometric phase, such as the co-seismic interferogram, also has the property of the nonlocal phase self-similarity. Therefore, the proposed nonlocal filtering method should also be applicable to deformation-induced interferometric phase filtering and can obtain a better filtering performance than the four reference methods used in this paper.
6. Conclusions
In this paper, a nonlocal InSAR phase filtering method via NL-PFNet was proposed to improve the filtering performance. NL-PFNet is designed based on the encoder–decoder structure and nonlocal feature selection strategy. Thanks to the powerful phase feature extraction ability of the encoder–decoder structure and the utilization of nonlocal information in the block, NL-PFNet can predict an accurate filtered phase after training using a large number of interferometric phase images with different noise levels. Experiments both on simulated and real InSAR data show that the proposed method significantly outperforms the three traditional well-established methods and another deep learning-based method. In experiments on simulated data, compared with the InSAR-BM3D filter and PFNet, the MSE of the proposed method is 25% and 11% lower, respectively. Furthermore, when processing the Sentinel-1 interferometric phase, compared with the InSAR-BM3D filter and PFNet, the metric Q of the proposed method is 25% and 9% higher, respectively. In addition, the running time of the proposed method is tens of times less than that of the traditional filtering methods. In future work, to further improve filtering performance, we will combine more advanced nonlocal processing methods with the deep learning networks to achieve InSAR phase filtering.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}