1. Introduction
Whether an artificial target or a natural target, it is of great significance to obtain its structure information. The acquisition of structural information can be realized by surface reconstruction of point cloud data of the target. However, point cloud data of some nature targets may carry a certain amount of unavoidable texture information and noise. For this reason, it is usually inadvisable to retain all the details of the original point cloud in the reconstruction results for some large-scale reconstruction tasks [
1,
2,
3], because the highly complex mesh structure can affect the efficiency and accuracy of subsequent operations. In recent years, lightweight surface reconstruction technology has attracted extensive attention in the field of computer vision and information processing.
Lightweight surface reconstruction refers to the technology of constructing a simple mesh model to represent the target surface structure. Different from dense mesh reconstruction technology, lightweight surface reconstruction only focuses on the main structure information of the target. Therefore, it can better filter the texture information and simplify the complexity of the model. At present, the available lightweight surface reconstruction methods are mainly to process artificial targets (buildings and man-made models) [
1,
2,
4,
5,
6,
7,
8], for the purpose of extracting the contour information of the object and achieving data compression. In respect of rock-mass engineering, the significance of constructing a rock mass model with simple and accurate surface information goes further than that. Such methods as block theory [
9] and discontinuous deformation analysis [
10] have been demonstrated as effective in carrying out analysis of the rock masses for their stability [
11]. In this process, it is essential to adopt a concise numerical model with accurate surface information (without texture information) as input. In particular, to carry out the subsequent block cutting process smoothly, the constructed rock mass model shall be made as simple as possible, without any highly complex grid structure (extremely small angle). Therefore, the lightweight surface reconstruction of rock mass point clouds is not only a problem needing to be solved for computer vision, but plays a significant role in the related numerical simulation calculations in the geotechnical field. Up to now, however, there is still limited research on the lightweight surface reconstruction of natural targets.
Laser scanning technology has the characteristics of high precision and non-contact, so it is widely used in the acquisition of natural rock mass data. However, different from the reconstruction of buildings, there are some special cases that should be considered and solved when processing point cloud data of natural targets, which can be summarized in the following three respects. First of all, due to geographical limits, natural conditions, and other influencing factors, it is practically difficult to ensure the quality of data on the rock-mass point cloud as collected from nature. In addition, the surface structure in some regions is extremely irregular, which can cause a further loss of surface information during surface segmentation. Therefore, how to deal with highly corrupted data is the key problem to be solved in rock mass surface reconstruction. Secondly, due to the complexity of surface structure, some errors need to be accommodated during the process of rock-mass surface segmentation, which may result in a deviation between the plane parameters and the real surface information to some extent. Due to the varying degrees of deviation between planes, there are various collision problems that may arise from the reconstruction. Finally, the boundaries of rock surface structural planes are usually irregular, which means that the shape information of boundaries is unfit for direct use in the reconstruction of the model. On the contrary, careful consideration shall be given to the simplification of these irregular shapes to ensure the simplicity of the model.
In order to address the above-mentioned problems, a lightweight surface reconstruction method is proposed in this paper from rock-mass point clouds.
Figure 1 shows an example of reconstruction. For each input point cloud, a surface segmentation method based on supervoxel is adopted to determine initial planar primitives. In order to make the generated model watertight, the segmentation result is added with an outer bounding box. In the process of generating the basic model, the line segments and their initial lengths in the model are obtained based on the connectivity of the patches and their true edge information. The corner points determined to exist in the model are calculated to complete the closure of local areas. Then, in order to determine the boundaries of missing areas, boundary prediction is performed. The coverage rate and the matching rate are taken as indicators to measure the results of boundary prediction in each plane. The final result of reconstruction is obtained through triangle segmentation of holes.
The contributions of this paper are detailed as follows:
A framework of lightweight surface reconstruction was proposed, which is effective in processing the natural rock-mass point cloud to construct a numerical model with accurate and concise surface information;
A solution to rock mass surface segmentation based on supervoxel was proposed, which can realize the effective segmentation of complex rock surface;
The hole search problem in a 3D point cloud was converted into the boundary prediction of 2D planes. An integer programming model was constructed to perform boundary prediction, so as to ensure the water-tightness of the model and the effectiveness of reconstruction.
This paper is structured as follows. The related work is introduced in
Section 2. In
Section 3, the proposed method is detailed. Then, the experimental results are presented and discussed in
Section 4.
Section 5 concludes the study, with a summary made and the future direction of research indicated.
2. Related Work
Over the past few decades, there has been plenty of research conducted on the surface reconstruction of point cloud for obtaining a dense mesh model of the target [
12,
13,
14,
15]. However, the model constructed using the above algorithm is often highly complex in structure and carries no clear structural plane information of the target. In recent years, there has been widespread attention brought to the extraction of geometric primitives from the point cloud and assembling them for the building of a simple polygonal mesh model. In this section, our focus is placed mainly on primitive extraction and primitive-based surface reconstruction.
Primitive extraction. In this part, we aim to achieve the effective segmentation of the target surface for extracting high-quality primitives. Currently, RANSAC [
16] has been demonstrated as effective in segmenting the surface of buildings and artificial models [
4]. In practice, the performance of RANSAC is determined by the probability that the optimal solution is obtained by a single sampling. It is supposed that there are
N points in the whole set of points and the maximum plane (the best plane) is comprised of
n points. Let
P indicate the probability that one sample can be used to obtain the best plane, as shown in Equation (
1).
That is to say, RANSAC is high efficient in dealing with simple structures. However, the segmentation of rock mass surface is obviously a more challenging task. Since the rock surface is rough and unpredictable, the complex surface structure of rock mass and a large amount of noise information will lead to a significant deterioration in the performance of RANSAC.
In order to improve the outcome of rock mass segmentation, there have been some novel methods of rock mass surface segmentation proposed. For example, Riquelme et al. [
17] conducted principal component analysis to determine the coplanarity of adjacent points, based on which high-precision segmentation was achieved by Hough Transform (DSE). Leng et al. [
18] proposed a multi-scale rock surface detection method based on HT and Region Growing(HT-RG), which is effective in dealing with the surface structures of different scales. Due to the high computational cost of HT, however, it is difficult to achieve high-efficiency segmentation using the above two methods. At present, the use of voxel segmentation to achieve the partial structured of the point cloud is an effective solution to improve the performance of the algorithm. For instance, Hu et al. [
19] put forward an efficient method of detection, where RANSAC was applied to perform coplanarity detection locally. The final result was obtained through regional growth. Based on the detection of local coplanarity, Liu et al. [
20] used HT for calculating the main direction to obtain the seed patch, thus improving the accuracy of regional growth(MOE). However, the coplanarity detection based on voxels is ineffective in constraining the effective information with a high degree of dispersion. Consequently, it is difficult to achieve high-precision detection using these methods.
In the reconstruction process, careful consideration shall be given to both the efficiency and precision of segmentation. Thus, our focus is placed on filtering the noise inside the patch and ensuring that the effective information in the point cloud is completely structured before the global calculation is performed.
Primitive-based surface reconstruction. The surface structure of the rock mass is distinctively irregular and unpredictable. For this reason, this article gives consideration neither to the potential relationship between primitives (such as parallel and orthogonal), nor to the repetitive structure or composite structure in the point cloud [
5,
21,
22,
23,
24,
25]. The methods used to assemble planar shapes into a simple mesh can be divided into two categories, which are the connectivity method and the slicing method.
Connectivity methods can be adopted to achieve model assembly according to the exact shape of patches and the connectivity relationship between patches. Therefore, this method is demanding on the shape of planes. Processing and assembling basic primitives are the two main steps in applying the connectivity method. Schindler et al. [
26] proposed a new method of surface model reconstruction for the artificial environment, with a complete 3D segmentation framework provided. Under this framework, the relationship between planes was parameterized and classified, while the reconstruction goal was not limited to the orthogonal relationship. Arikan et al. [
27] obtained effective vertices by simplifying the plane. With the effective vertices in the region paired under the restriction of the constraint set, the adjacent patches can be closed. For the missing areas in the data, manual intervention was performed to carry out the repair. Alliez et al. [
28] classified the points, and then preserved the region with special structure in the point cloud(such as the corner) under Delaunay triangulation. In the meantime, a minimum cut formula combining structure, geometry, and visibility was proposed to achieve high-quality reconstruction. Holzmann et al. [
29] used dense triangular meshes to repair the missing parts for ensuring the water-tightness of the constructed model.
Though the existing connectivity methods are capable to achieve efficient building reconstruction, they can hardly deal with the rock mass in an effective way. Since most rock mass planes show no regularity in shape, it is difficult to assemble connected primitives by means of their shape information. In addition, it is also an open problem to obtain the simplified grid representation of information loss regions. In this study, our focus is placed on addressing the dependence of the connectivity method on shape information and ensuring the model is watertight.
Slicing methods ignore the shape information of the plane, since all the points and boundaries in the output mesh are obtained through the parameter calculation. Thus, these methods are made more robust to complex data. Chauve et al. [
30] were the first to propose an algorithm intended to automatically achieve concise and idealized 3D representation from the unstructured point data of real scenes. When primitives are processed, the slicing method can be used to address the structure loss caused by occlusion. Similarly, Verdie et al. [
31] performed plane cutting using line segments obtained by point cloud fitting, which can simplify the contour of the model and solve the simple problem of information loss. After the plane contained in the scene was identified, Mura et al. [
32] obtained the 3D complex of the target by means of plane expansion, based on which the volume reconstruction of the room was realized. Furthermore, a more efficient and robust method of point cloud lightweight reconstruction was proposed by Nan et al. [
4] According to this method, all planes would be extended freely in the bounding box to obtain several slices. Then, the output model is constructed by screening all possible models. Coverage rate, matching rate and model complexity are used to assess the quality of the model. However, the performance of this method is constrained by its high computation cost when complex structures are dealt with. In addition, the constructed model might be made erroneous due to the high corruption of inputted data. On this basis, Bauchet et al. [
33] proposed a dynamic reconstruction method. Rather than decomposing the space completely, it adopts gradual extension. The extension would be terminated after a collision. Though the above methods solve the high computing cost incurred by the algorithm effectively, the reconstruction error caused by the high corruption of the data persists.
During the process of rock mass surface reconstruction, it is common and inevitable to suffer data damage due to various factors. At the same time, the cumulative error may lead to the collision between planes. In the process of rock mass surface reconstruction, the above problems need to be carefully considered and solved.
3. Methodology
The method proposed in this study involves three main steps. Firstly, plane primitives are extracted through the surface segmentation of rock point clouds. Then, basic models are constructed using the edge information of the plane and the connection relationship between planes. Finally, the missing boundaries in the model are predicted to conduct the search and reconstruction of information-missing areas.
3.1. Surface Segmentation
Coplanarity detection. At the start of the algorithm, the coplanarity detection method based on voxel segmentation is adopted, which is effective in distinguishing obvious planes and discrete information. RANSAC is relied on to carry out a search for the best plane in each local space. It is worth noting that, in each local space, coplanarity detection can be performed repeatedly if there are sufficient remaining points. The first obtained patch is taken as a growth unit, while the rest facets are merged into the adjacent similar growth units.
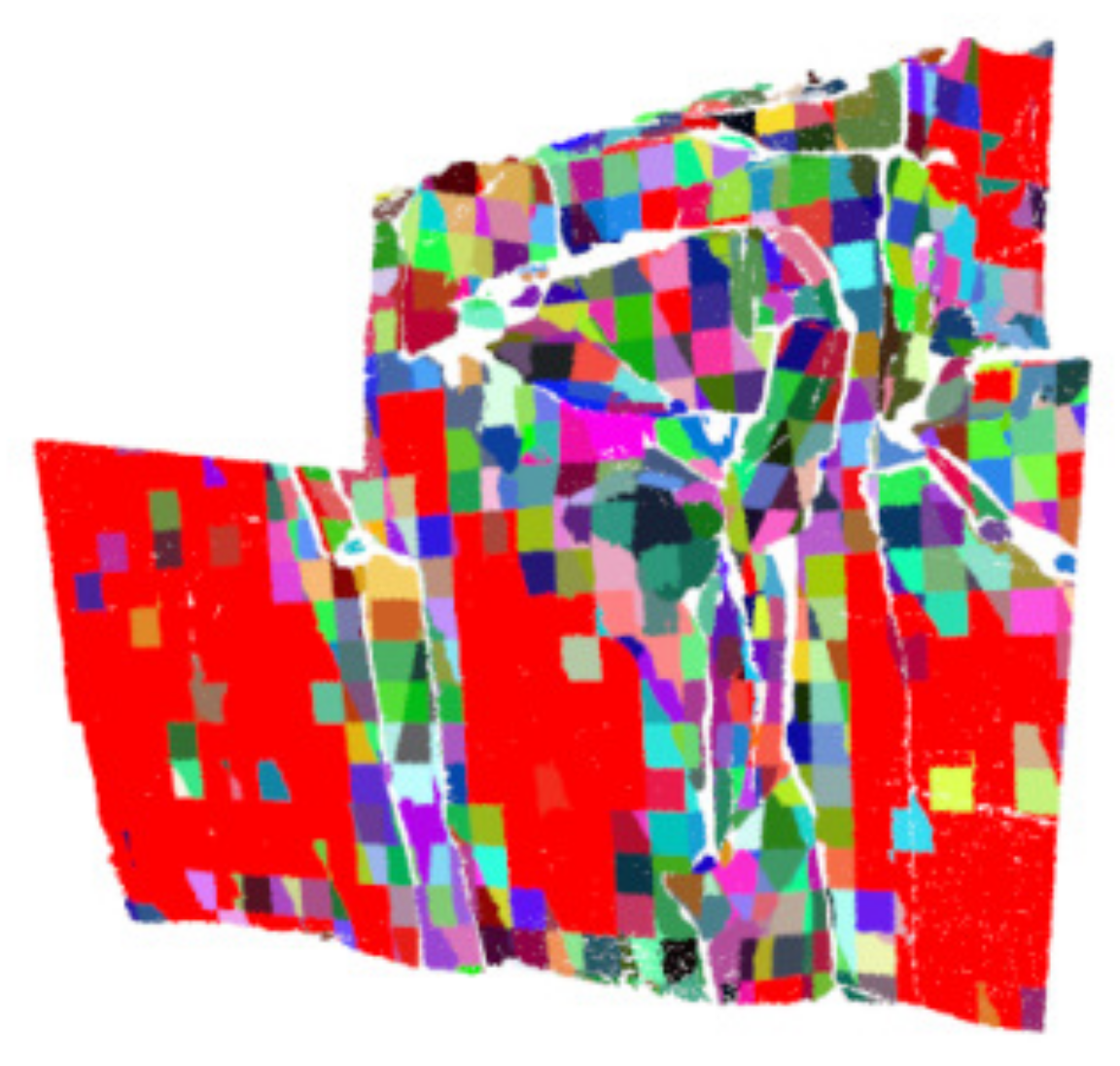
Texture information identification. In this paper, the identification of internal texture information is achieved by determining the position of discrete information. To achieve this purpose, a virtual region growth is performed for each growth unit to determine whether the patch can form a potential plane with all adjacent patches. In the case of successful growth, the growth unit is treated as an internal patch. The discrete information around the patch will be regarded as texture information rather than structure information, and will be ignored in the subsequent calculation process. The red area shown in
Figure 2 is made up of the recognized internal patches.
Supervoxel segmentation. After the internal noise is filtered, the supervoxel is used to process the discrete information accurately. More specifically, with each growth unit as a seed, the surrounding discrete information is incorporated into the seed depending on the exact judgment conditions including distance and angle. Furthermore, in order to ensure the effectiveness of the above process, it is necessary to ensure that the parameters of the growth unit do not change significantly. In this case, an effective growth is required to meet some additional conditions, as shown in Equation (
2).
where
represents the final growth result,
P denotes the initial patch, and
refers to the result after a growth. That is to say, the growth result with the largest number of points is retained when the angle change falls below the threshold. The above-mentioned process can be achieved through iterative growth and the updating to growth parameters.
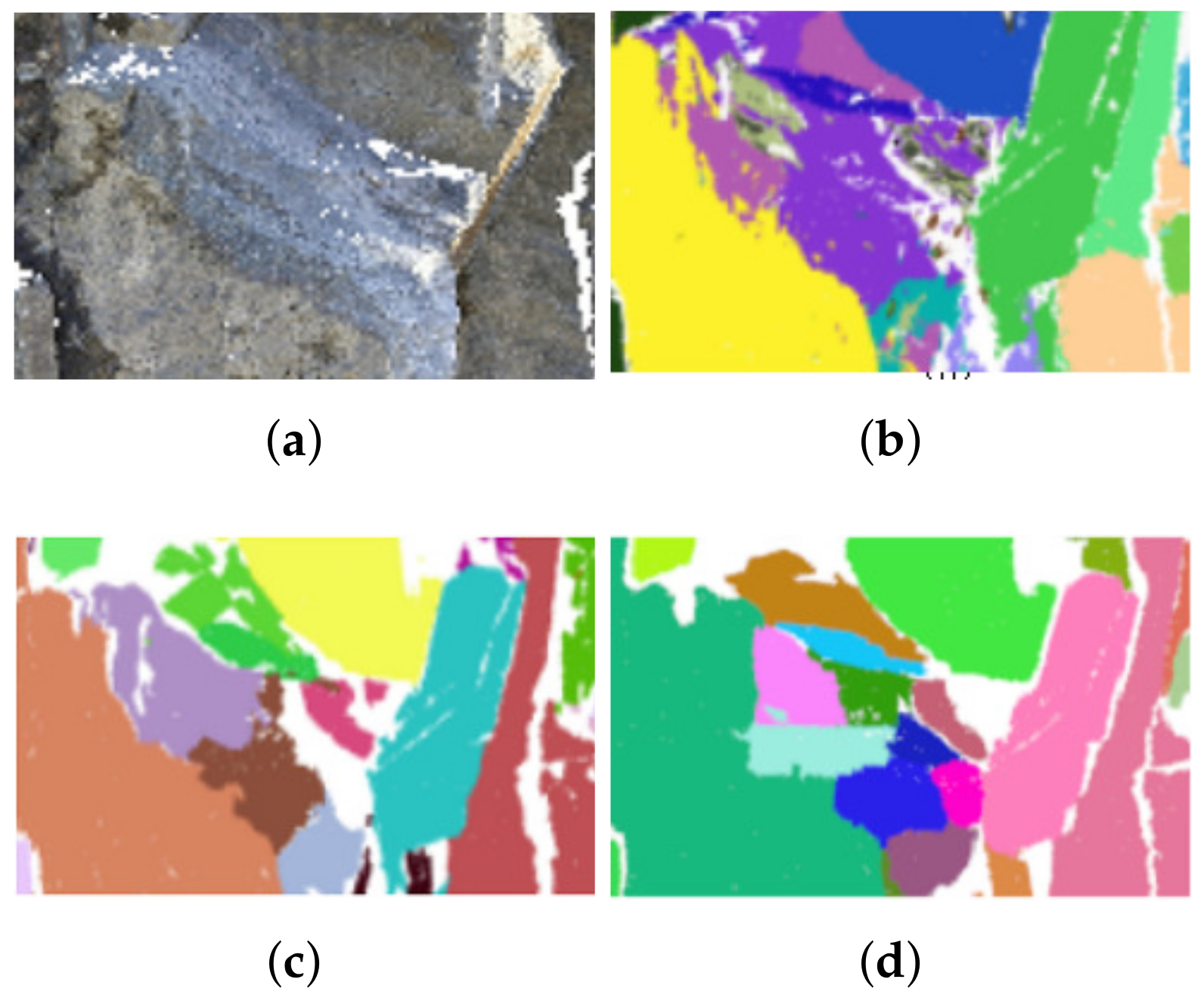
The essence of supervoxel segmentation is to achieve complete over-segmentation of surface structure and ensure complete structuring of effective structural information.
Figure 3 shows the significance of structuring point clouds for dealing with complex surface structures. As more information gets integrated into the structured point cloud, the performance of the algorithm shows a significant improvement. Due to the achievement made in the complete over segmentation, there is more detailed information that can be retained.
Region Growing. After supervoxel segmentation, the surface segmentation problem is converted into a patch combination problem. The final result of segmentation is obtained by combining super voxel patches. Notably, the internal patches can be taken as seeds preferentially during growth, which lays a solid foundation of growth for the whole process. The segmentation process and reconstruction process conducted in our method are closely related to each other. As part of the adaptive adjustment, the setting of growth parameters will be discussed later(as shown in
Section 3.2).
3.2. Basic Model Generation
Boundary reconstruction. Given that the shape information of the primitive contributes little to the initial stage of rock mass reconstruction, the boundaries of a primitive should be reconstructed. More specifically, these two planes are potentially continuous if there are only two planes in the local space. In order not to miss all possible potential relationships, multi-scale voxel division is performed to carry out search repeatedly. Suppose
U is the set of connection relations as obtained by plane
P after the i-th search, then the final connection relation set
of
P can be calculated using Equation (
3):
Suppose
Q is an element of
, then the intersection line of
P and
Q can be calculated. By calculating the minimum distance between the plane and the intersection line
l, it can be determined whether the intersection line exists (as shown in Equation (
4)).
where
p and
q represent points in the plane, and
refers to the threshold. At the time of boundary reconstruction, only the intersection line that satisfies Equation (
4) can be retained. Thus, some approximately parallel structures can be excluded.
Furthermore, the initial length of each intersection line is calculated according to the edge information of related planes. Let
denote the part related to the straight line
l in the edge information of the plane
P, which can be expressed as Equation (
5).
Let
denote the vertical projection of
on
l. Similarly, the relevant information
and
of patch
Q can be obtained as well. Only when Equation (
6) is satisfied, can the connectivity between a set of patches be considered reliable and obvious.
where
indicates the threshold. In the final boundary set, only the intersection lines calculated by the clear connection relation are retained, with the effective range of the intersection lines treated as the coincident part of the projection.
During our process of reconstruction, the assembly of primitives is carried out in the first place. However, the boundary structure of each plane is made open at present, as shown in
Figure 4b. This problem will be resolved gradually in the follow-up process.
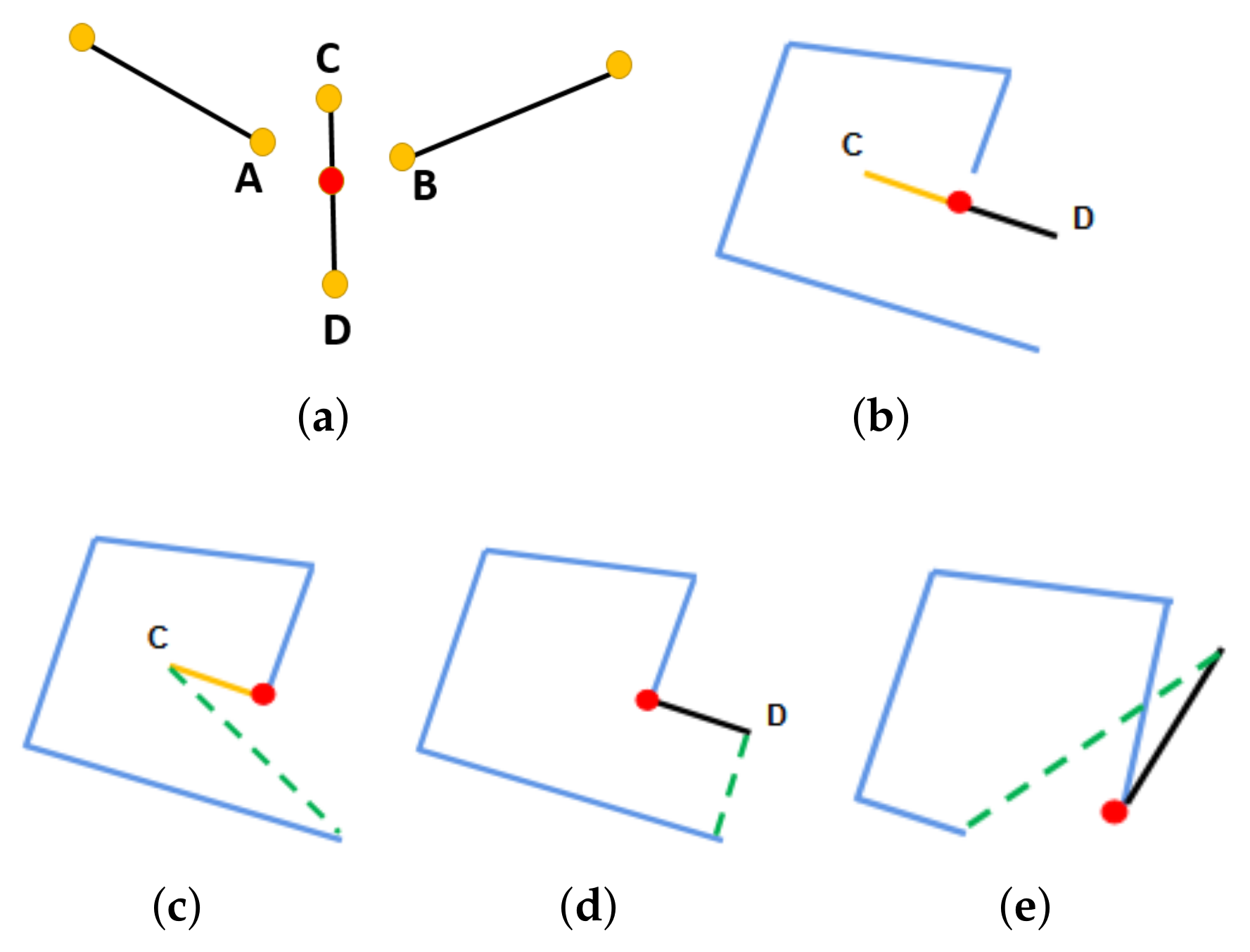
Corner calculation. The corner points in the model are obtained by calculating the common points of the three planes which conform to the connection relationship. Then, one endpoint of the intersection line is extended to the corner for completing the local closure. In particular, when the extended distance is made overly long by cumulative error, this local region is closed by adding a triangular patch. It is worth noting that the local space created by the selected three endpoints does not contain other structures is the premise of corner calculation.
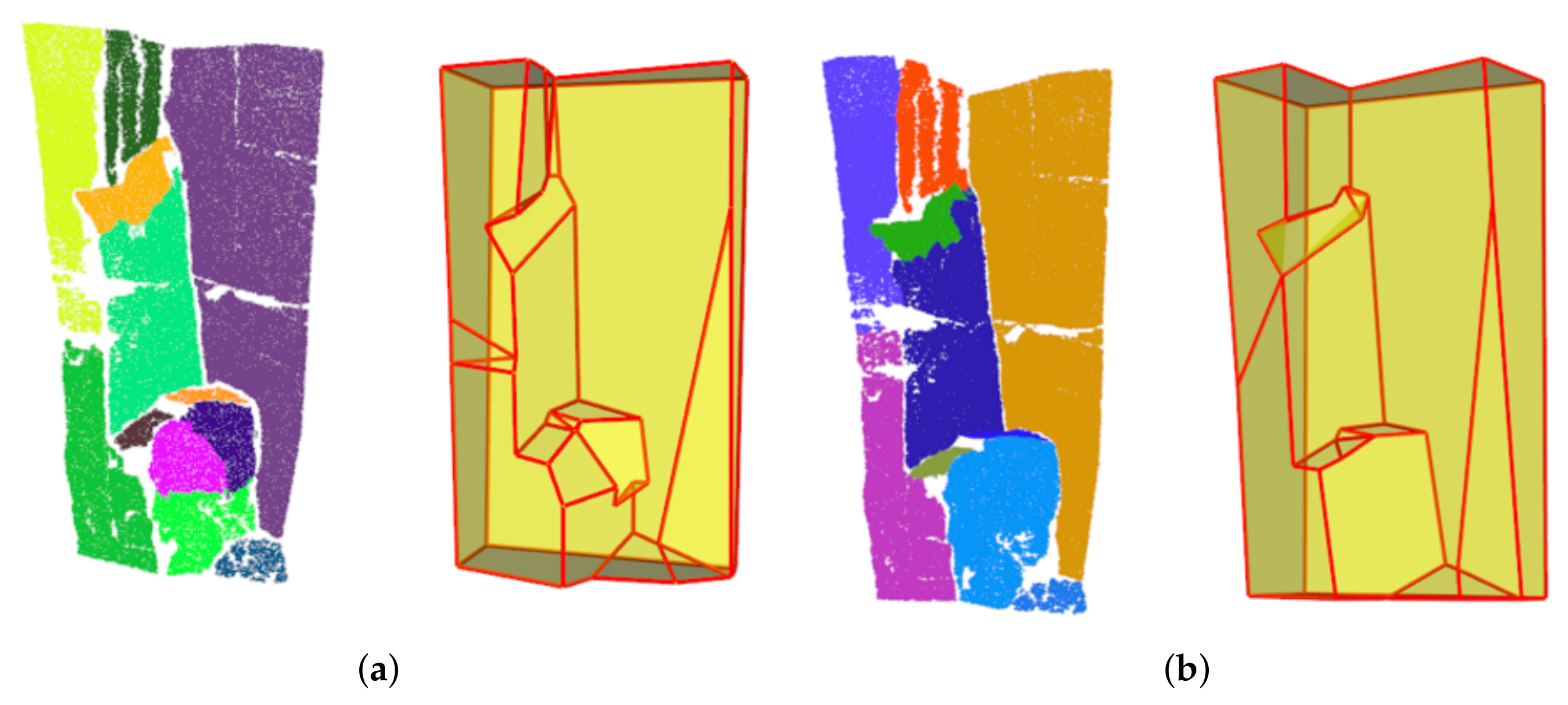
In case of an intersection or potential intersection in the boundary set, then the selection of endpoints will become problematic (as shown in
Figure 5a). In this study, all possible results are retained, which means there are multiple candidate models preserved after corner calculation (as shown in
Figure 6). During subsequent boundary prediction, different corner selections will lead to the difference of the shape to the final boundary (
Figure 5c,d); this shape information will be used as the basis for screening the optimal reconstruction results. In practice, an inappropriate endpoint selection can lead to the failure of boundary prediction in many cases (
Figure 5e).
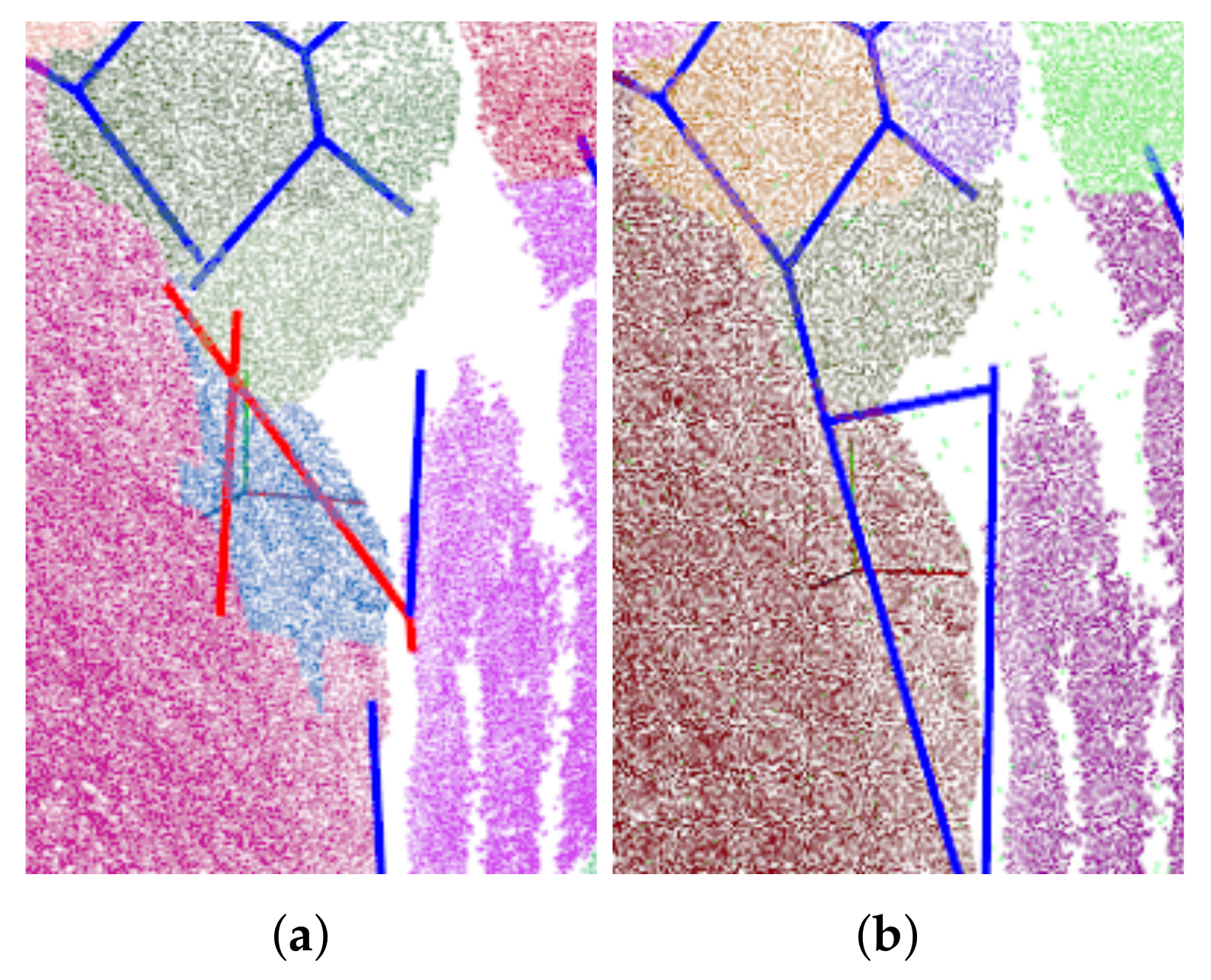
Adaptive adjustment (Collision detection). Due to the impact of cumulative error, there is a real possibility that collisions occur between planes. After boundary reorganization, the collision occurring between patches is indicated by the crossing of boundaries. During actual corner calculation, some collisions can be resolved, but those collisions failing to meet the conditions of corner calculation must be repaired through adaptive adjustment. Herein, it is proposed to divide the frequently-used parameter interval of supervoxel merged into the high-precision initial segmentation interval (used in region growing) and adaptive interval. The segmentation results obtained using the initial segmentation parameters are referenced to perform the first boundary reconstruction. In the area of collision, the similarity of the involved planes is calculated through Equation (
7).
where
and
represent the actual angle and distance deviation, while
and
refer to the thresholds. Within the range of adaptive threshold, a more similar set of planes should be merged (as shown in
Figure 7). The supervoxel segmentation and division of parameter interval are purposed to eliminate the risk of under-segmentation from the reconstruction process. Therefore, all collision problems encountered in the reconstruction process can be attributed to over-segmentation.
In essence, adaptive adjustment is purposed to adjust the segmentation results according to the current state of reconstruction. After the adjustment, the composition of the plane set and the connection relationship could have changed, which makes it necessary to recalculate the boundary information of each plane. The effective basic model free from intersection problems can be constructed by one-off iteration or multiple iterations.
It should be noted that not all collision problems can be solved by adaptive adjustment, because the rock surface is completely irregular. Thus, when multiple groups of collision problems exist in a local region, manual intervention is still necessary.
3.3. Model Closure
Boundary prediction. In this section, the missing boundary is predicted according to the exact shape of the patch and the available model information. For each plane, all of the non-corner endpoints in the boundary set are extracted and paired, with each pair of points connected by a line. Among all possible pairings, the pairing results which are completely connected but with no intersection are retained. Moreover, the final boundary set of P is determined according to the current state of the point cloud. In this method, there are two indicators used to assess the quality of a new group of boundary, including coverage rate and matching rate.
The coverage rate indicates the ability of the area formed by the new boundary to cover the original data. Let
G represent a set of feasible new boundaries as obtained by boundary prediction and
represent the set of points contained in
G, then the coverage rate of
can be calculated using Equation (
8).
where
p represents the point in the original point set
P. In general, the effectiveness of reconstruction can be ensured by maintaining patch coverage.
Since some boundary sets with high coverage may create some redundant space, it is worthwhile to consider introducing the matching rate to address this problem. In order for a fast search of the boundary distant from the original data, all parts of the boundary set which are tangent or intersect with the point cloud are considered as matching (as shown in
Figure 8). Therefore, the matching rate can be calculated using Equation (
9).
where
represents the matching part of
G. In order to calculate
, it is necessary to determine the range of the line segment that matches the data by performing a fixed radius search of each point in the plane. To simplify the calculation process, the matching length of a line segment is obtained via equidistant sampling.
Based on the above information, the integer programming model intended to perform boundary prediction can be expressed as Equation (
10).
where
represents the set of non-corner points of a plane. With a point
in
selected,
represents the set of points that are possible to match
(excluding itself and the points connected with
in the original boundary set).
is used to count the number of times that
is used in each round of pairing.
represents the segment in
G that has no common vertex with segment
.
refers to the set of connected points searched with any point as the starting point. The hard constraint in the formula is purposed to ensure that the final boundary set is not in an intersection and closed. Due to the limited number of non-corner points, the model can be solved quickly without any solver.
After optimization, the best set of boundaries can be obtained for each patch. When the boundary prediction is completed for all planes, the holes in the point cloud can be identified (as shown in
Figure 9b). It is worth noting that in case of multiple candidate models, the global coverage and matching rate of each model shall be calculated to screen out the best outcome of the reconstruction.
Model recovery and triangulation. After boundary prediction, there are some points in the point cloud that can not be covered by the model (as shown in
Figure 9c). Among them, local information loss is made inevitable if it results from boundary reconstruction (cut by the red line). On the contrary, the information loss caused by boundary prediction can be repaired by means of model recovery. The process of repair is simple, just simplify the outer boundary of the uncovered point set and assemble it on the model. It is obviously easier to introduce explicit structure into the model than to deal with redundant faces, which is the reason why the boundary is allowed to appear inside the plane when the matching rate is calculated. Finally, the hole is triangulated to ensure that the final model is watertight.
5. Conclusions
This paper focuses on the efficient lightweight surface reconstruction method of rock mass point cloud. Different from the man-made target, a large amount of texture information and inevitable data loss on the surface of rock mass are two difficulties to be solved during rock-mass point cloud surface reconstruction. Considering the above factors, this paper proposes a lightweight surface reconstruction method, which can generate a rock-mass numerical model with concise and accurate surface structure information. The generated model can be directly used for numerical simulation.
In this paper, seven groups of rock mass data are used to verify the proposed algorithm, and sufficient comparative experiments are carried out. This method can realize efficient lightweight surface reconstruction of rock-mass point cloud within high topological accuracy.It is worth mentioning that we effectively solve the collision problem caused by accumulated errors during surface reconstruction. In addition, we have analyzed and tested the problem of data corruption caused by many situations to ensure the effectiveness of the algorithm in dealing with highly corrupted data.
The proposed method constructs a watertight rock mass model by adding a rectangular bounding box, which may result in a certain number of redundant faces in the generated model. These redundant surfaces will not affect the numerical simulation but will bring some visual differences. In addition, when the outer boundary of the input data is too irregular, it becomes more difficult to add connectivity information to the bounding box. Therefore, the related problems involving bounding boxes can be further studied. At the same time, in order to avoid too many iterations during adaptive adjustment, appropriate human intervention is still necessary when dealing with some complex data. Finally, when this method deals with large-scale rock mass data, it is difficult to obtain high-precision reconstruction results. Therefore, how to reasonably decompose the large-scale reconstruction task into several sub-tasks and combine multiple sub-models to obtain high-precision reconstruction results deserves further study.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}