
Space-Based Detection of Significant Water-Depth Increase Induced by Hurricane Irma in the Everglades Wetlands Using Sentinel-1 SAR Backscatter Observations


Abstract
:1. Introduction
2. Background
2.1. SAR Backscatter in Wetlands
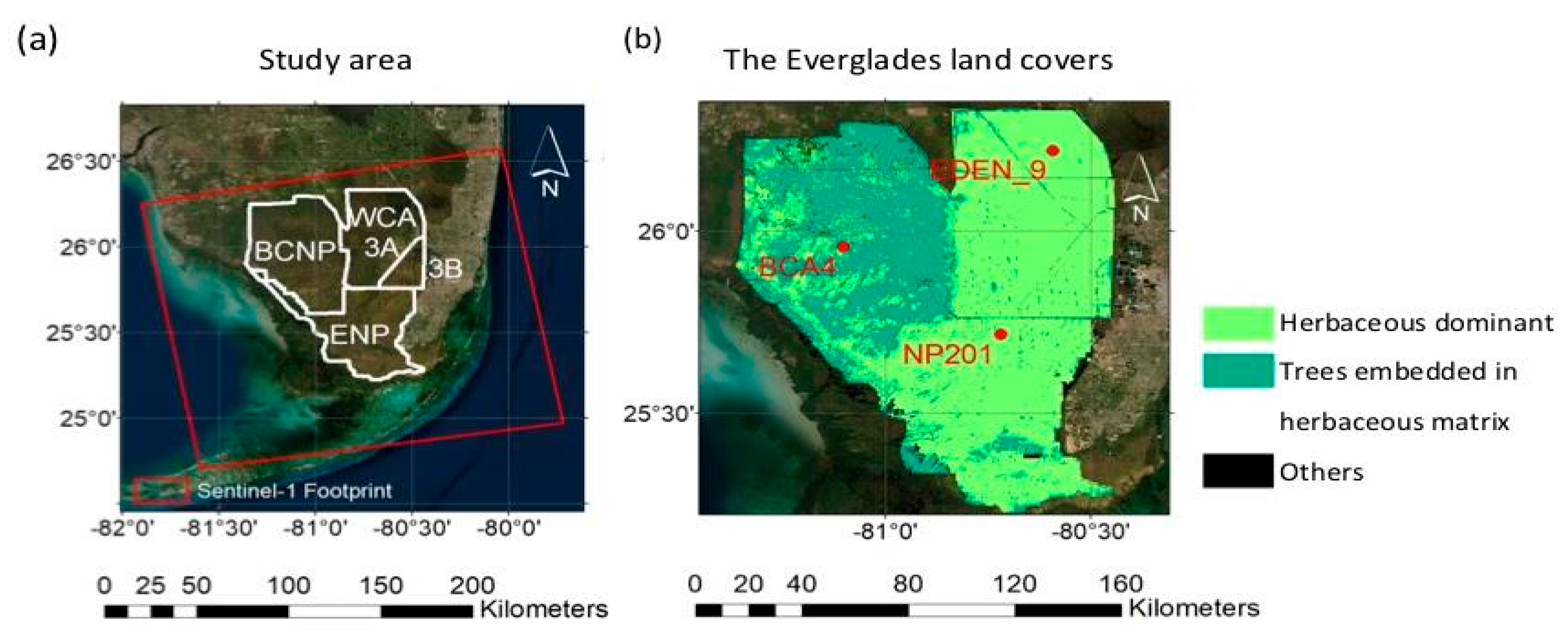
2.2. Study Area
2.3. Hurricane Irma
3. Data and Data Preprocessing
3.1. SAR Data and Pre-Processing
3.2. Hydrologic Data and Digital Terrain Model
4. Methodology
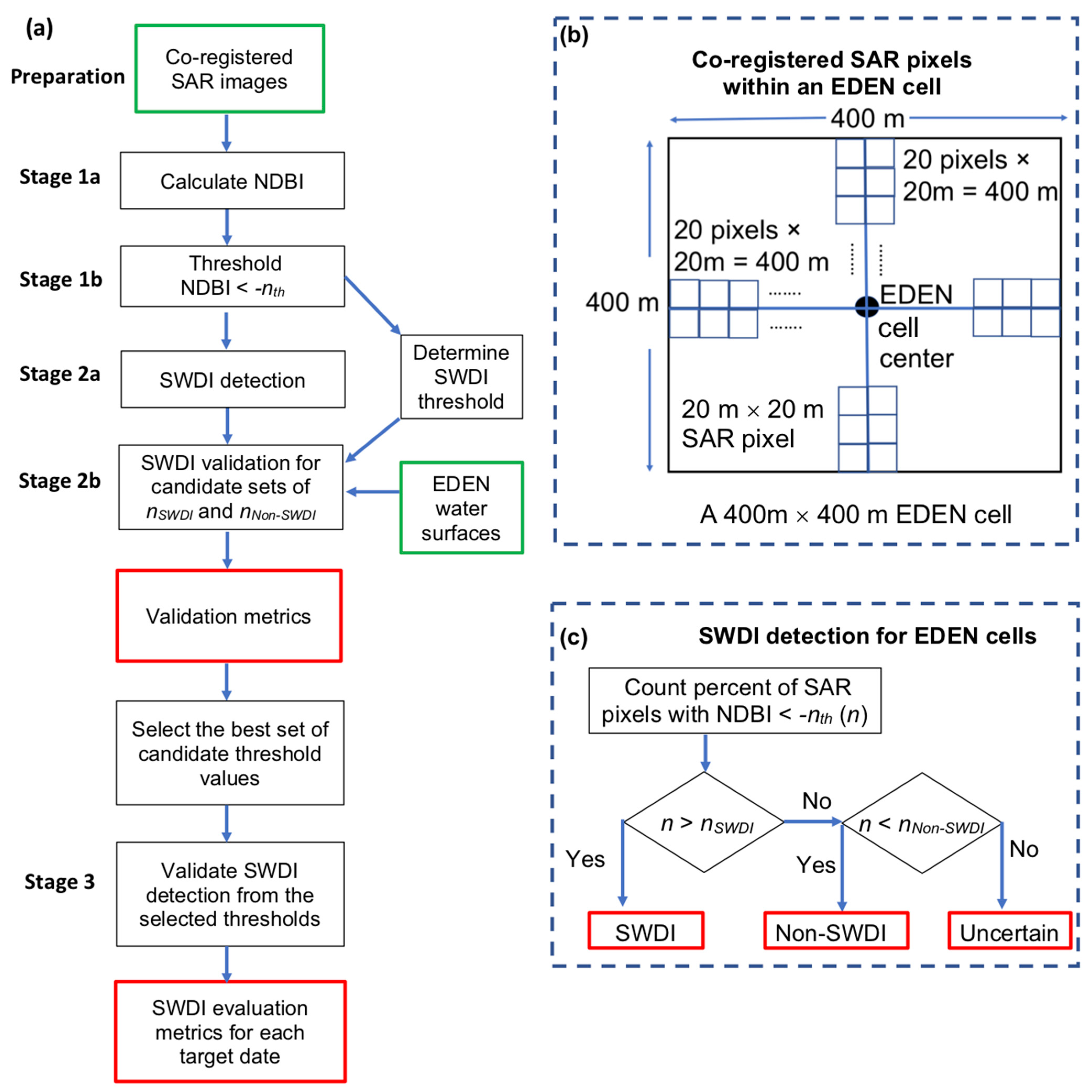
4.1. SWDI Detection Methodology
4.2. Selection of Threshold Values
5. Results
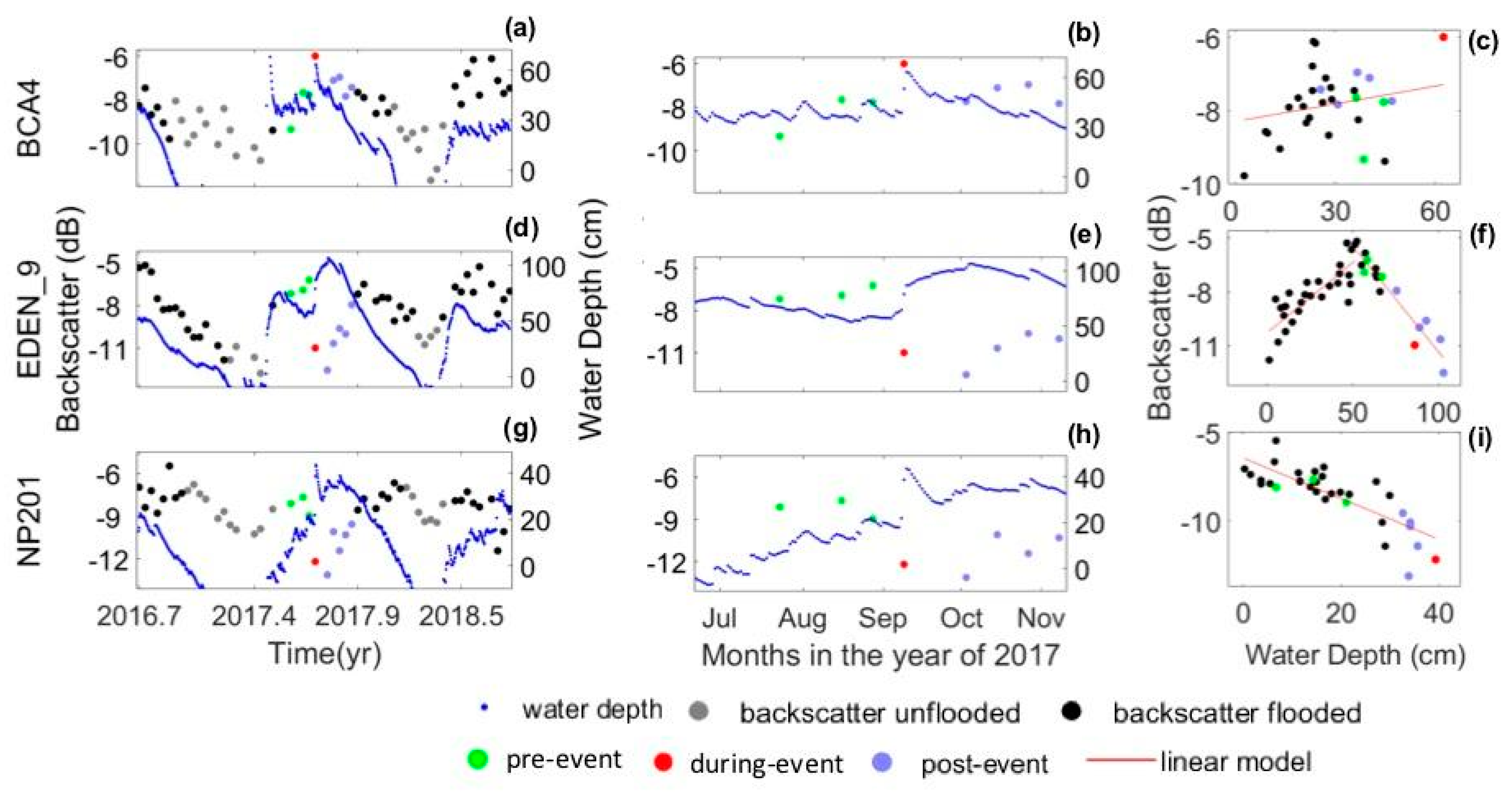
5.1. Backscatter Behavior in Response to Variations in Water Depth for Three Selected Water Gauges
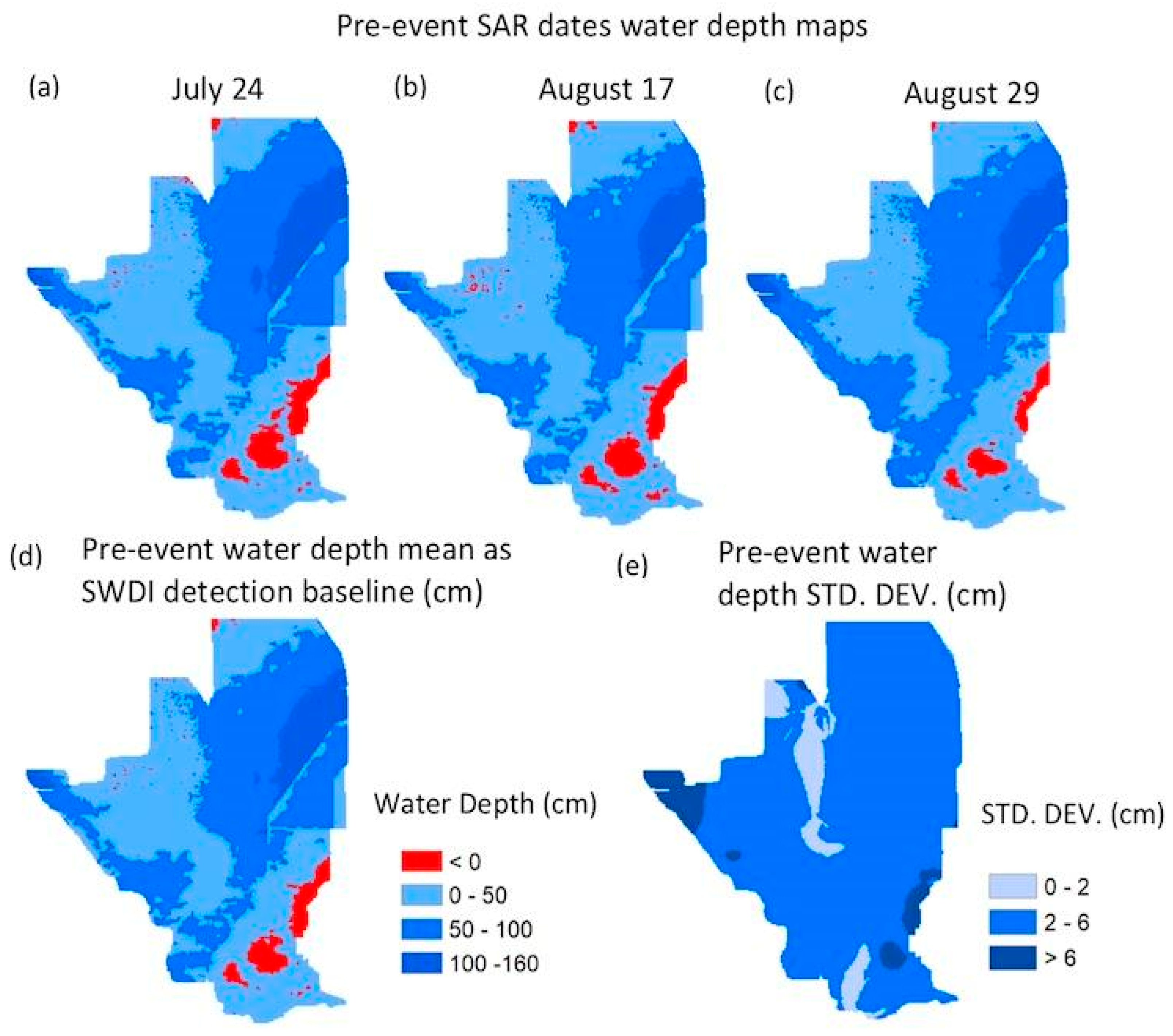
5.2. Pre-Event Hydrological Conditions
5.3. Results of SWDI Detection and Validation
5.3.1. NDBI Maps for the During- and Selected Post-Event SAR Dates
5.3.2. SWDI Detection and Validation Using Candidate Sets of nSWDI and nNon-SWDI Thresholds
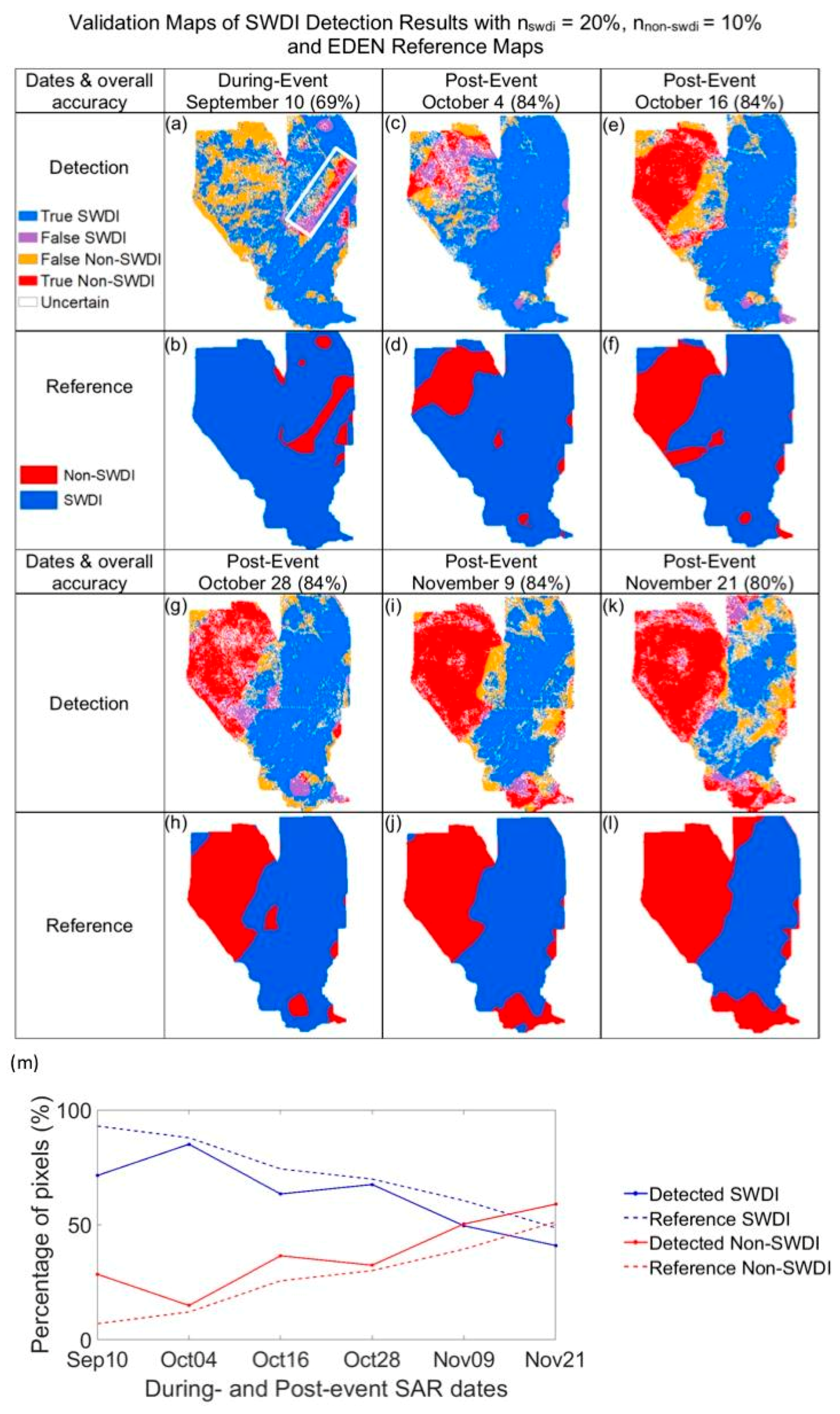
5.3.3. SWDI Validation Using the Selected Set of Thresholds
6. Discussion
6.1. Evaluation of SWDI Detection Algorithm Performance
6.1.1. NDBI Thresholding for SAR Pixels
6.1.2. Selection of SWDI Detection Thresholds
6.1.3. Evaluating SWDI Performance Based on Validation Results
6.2. Conditions and Limitations in Applications of the SWDI Detection Algorithm
6.2.1. Conditions of Land Cover Selection
6.2.2. Conditions of Pre-Event Baseline Data Selection
6.2.3. Conditions of Post-Event Dates Selection
6.2.4. Conditions of Polarization Selection
6.2.5. Limitation of Spatial Resolution
6.3. Comparison with Previous Studies Using SAR and InSAR Observations for Hydrological Applications
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lang, M.W.; Kasischke, E.S. Using C-Band Synthetic Aperture Radar Data to Monitor Forested Wetland Hydrology in Maryland’s Coastal Plain, USA. IEEE Trans. Geosci. Remote Sens. 2008, 46, 535–546. [Google Scholar] [CrossRef]
- Van Dolah, R.F.; Anderson, G.S. Effects of Hurricane Hugo on Salinity and Dissolved Oxygen Conditions in the Charleston Harbor Estuary. J. Coast. Res. 1991, 83–94. [Google Scholar]
- Michener, W.K.; Blood, E.R.; Bildstein, K.L.; Brinson, M.M.; Gardner, L.R. Climate Change, Hurricanes and Tropical Storms, and Rising Sea Level in Coastal Wetlands. Ecol. Appl. 1997, 7, 770–801. [Google Scholar] [CrossRef]
- Gough, L.; Grace, J.B. Effects of Flooding, Salinity and Herbivory on Coastal Plant Communities, Louisiana, United States. Oecologia 1998, 117, 527–535. [Google Scholar] [CrossRef]
- Garssen, A.G.; Baattrup-Pedersen, A.; Voesenek, L.A.C.J.; Verhoeven, J.T.A.; Soons, M.B. Riparian Plant Community Responses to Increased Flooding: A Meta-Analysis. Glob. Chang. Biol. 2015, 21, 2881–2890. [Google Scholar] [CrossRef]
- Dankers, R.; Feyen, L. Climate Change Impact on Flood Hazard in Europe: An Assessment Based on High-Resolution Climate Simulations. J. Geophys. Res. 2008, 113, D19. [Google Scholar] [CrossRef]
- Bourgeau-Chavez, L.L.; Smith, K.B.; Brunzell, S.M.; Kasischke, E.S.; Romanowicz, E.A.; Richardson, C.J. Remote Monitoring of Regional Inundation Patterns and Hydroperiod in the Greater Everglades Using Synthetic Aperture Radar. Wetlands 2005, 25, 176. [Google Scholar] [CrossRef]
- Long, S.; Fatoyinbo, T.E.; Policelli, F. Flood Extent Mapping for Namibia Using Change Detection and Thresholding with SAR. Environ. Res. Lett. 2014, 9, 035002. [Google Scholar] [CrossRef]
- Ward, D.P.; Petty, A.; Setterfield, S.A.; Douglas, M.M.; Ferdinands, K.; Hamilton, S.K.; Phinn, S. Floodplain Inundation and Vegetation Dynamics in the Alligator Rivers Region (Kakadu) of Northern Australia Assessed Using Optical and Radar Remote Sensing. Remote Sens. Environ. 2014, 147, 43–55. [Google Scholar] [CrossRef]
- Tsyganskaya, V.; Martinis, S.; Marzahn, P.; Ludwig, R. Detection of Temporary Flooded Vegetation Using Sentinel-1 Time Series Data. Remote Sens. 2018, 10, 1286. [Google Scholar] [CrossRef] [Green Version]
- Townsend, P.A. Mapping seasonal flooding in forested wetlands using multi-temporal Radarsat SAR. Photogramm. Eng. Remote Sens. 2001, 67, 857–864. [Google Scholar]
- Townsend, P.A. Relationships between Forest Structure and the Detection of Flood Inundation in Forested Wetlands Using C-Band SAR. Int. J. Remote Sens. 2002, 23, 443–460. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Pierdicca, N.; Chini, M.; Guerriero, L. Monitoring Flood Evolution in Vegetated Areas Using COSMO-SkyMed Data: The Tuscany 2009 Case Study. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1807–1816. [Google Scholar] [CrossRef]
- Brivio, P.A.; Colombo, R.; Maggi, M.; Tomasoni, R. Integration of Remote Sensing Data and GIS for Accurate Mapping of Flooded Areas. Int. J. Remote Sens. 2002, 23, 429–441. [Google Scholar] [CrossRef]
- Mason, D.C.; Horritt, M.S.; Dall’Amico, J.T.; Scott, T.R.; Bates, P.D. Improving River Flood Extent Delineation From Synthetic Aperture Radar Using Airborne Laser Altimetry. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3932–3943. [Google Scholar] [CrossRef] [Green Version]
- Matgen, P.; Hostache, R.; Schumann, G.; Pfister, L.; Hoffmann, L.; Savenije, H.H.G. Towards an Automated SAR-Based Flood Monitoring System: Lessons Learned from Two Case Studies. Phys. Chem. Earth Parts A/B/C 2011, 36, 241–252. [Google Scholar] [CrossRef]
- Cian, F.; Marconcini, M.; Ceccato, P. Normalized Difference Flood Index for Rapid Flood Mapping: Taking Advantage of EO Big Data. Remote Sens. Environ. 2018, 209, 712–730. [Google Scholar] [CrossRef]
- Schumann, G.; Hostache, R.; Puech, C.; Hoffmann, L.; Matgen, P.; Pappenberger, F.; Pfister, L. High-Resolution 3-D Flood Information From Radar Imagery for Flood Hazard Management. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1715–1725. [Google Scholar] [CrossRef]
- Matgen, P.; Schumann, G.; Henry, J.-B.; Hoffmann, L.; Pfister, L. Integration of SAR-Derived River Inundation Areas, High-Precision Topographic Data and a River Flow Model toward near Real-Time Flood Management. Int. J. Appl. Earth Obs. Geoinf. 2007, 9, 247–263. [Google Scholar] [CrossRef]
- Zwenzner, H.; Voigt, S. Improved Estimation of Flood Parameters by Combining Space Based SAR Data with Very High Resolution Digital Elevation Data. Hydrol. Earth Syst. Sci. Discuss. 2008, 5, 2951–2973. [Google Scholar] [CrossRef] [Green Version]
- Brown, K.M.; Hambidge, C.H.; Brownett, J.M. Progress in Operational Flood Mapping Using Satellite Synthetic Aperture Radar (SAR) and Airborne Light Detection and Ranging (LiDAR) Data. Prog. Phys. Geogr. Earth Environ. 2016, 40, 196–214. [Google Scholar] [CrossRef]
- Jo, M.J.; Osmanoglu, B.; Zhang, B.; Wdowinski, S. Flood Extent Mapping Using Dual-Polarimetric Sentinel-1 Synthetic Aperture Radar Imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-3, 711–713. [Google Scholar] [CrossRef] [Green Version]
- Cian, F.; Marconcini, M.; Ceccato, P.; Giupponi, C. Flood Depth Estimation by Means of High-Resolution SAR Images and Lidar Data. Nat. Hazards Earth Syst. Sci. 2018, 18, 3063–3084. [Google Scholar] [CrossRef] [Green Version]
- Parida, B.R.; Tripathi, G.; Pandey, A.C.; Kumar, A. Estimating Floodwater Depth Using SAR-Derived Flood Inundation Maps and Geomorphic Model in Kosi River Basin (India). Geocarto Int. 2021, 1–26. [Google Scholar] [CrossRef]
- Zhang, B.; Wdowinski, S.; Gann, D.; Hong, S.-H.; Sah, J. Spatiotemporal Variations of Wetland Backscatter: The Role of Water Depth and Vegetation Characteristics in Sentinel-1 Dual-Polarization SAR Observations. Remote Sens. Environ. 2022, 270, 112864. [Google Scholar] [CrossRef]
- Yuan, T.; Lee, H.; Jung, H.C. Toward Estimating Wetland Water Level Changes Based on Hydrological Sensitivity Analysis of PALSAR Backscattering Coefficients over Different Vegetation Fields. Remote Sens. 2015, 7, 3153–3183. [Google Scholar] [CrossRef] [Green Version]
- Kim, D.; Lee, H.; Laraque, A.; Tshimanga, R.M.; Yuan, T.; Jung, H.C.; Beighley, E.; Chang, C.-H. Mapping Spatio-Temporal Water Level Variations over the Central Congo River Using PALSAR ScanSAR and Envisat Altimetry Data. Int. J. Remote Sens. 2017, 38, 7021–7040. [Google Scholar] [CrossRef]
- Kasischke, E.S.; Smith, K.B.; Bourgeau-Chavez, L.L.; Romanowicz, E.A.; Brunzell, S.; Richardson, C.J. Effects of Seasonal Hydrologic Patterns in South Florida Wetlands on Radar Backscatter Measured from ERS-2 SAR Imagery. Remote Sens. Environ. 2003, 88, 423–441. [Google Scholar] [CrossRef]
- Kasischke, E.S.; Bourgeau-Chavez, L.L.; Rober, A.R.; Wyatt, K.H.; Waddington, J.M.; Turetsky, M.R. Effects of Soil Moisture and Water Depth on ERS SAR Backscatter Measurements from an Alaskan Wetland Complex. Remote Sens. Environ. 2009, 113, 1868–1873. [Google Scholar] [CrossRef]
- Kim, J.-W.; Lu, Z.; Jones, J.W.; Shum, C.K.; Lee, H.; Jia, Y. Monitoring Everglades Freshwater Marsh Water Level Using L-Band Synthetic Aperture Radar Backscatter. Remote Sens. Environ. 2014, 150, 66–81. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Melack, J.M.; Dunne, T.; Mertes, L.A.; Hess, L.L.; Smith, L.C. Interferometric Radar Measurements of Water Level Changes on the Amazon Flood Plain. Nature 2000, 404, 174–177. [Google Scholar] [CrossRef] [PubMed]
- Alsdorf, D.E.; Smith, L.C.; Melack, J.M. Amazon Floodplain Water Level Changes Measured with Interferometric SIR-C Radar. IEEE Trans. Geosci. Remote Sens. 2001, 39, 423–431. [Google Scholar] [CrossRef]
- Wdowinski, S.; Amelung, F.; Miralles-Wilhelm, F.; Dixon, T.H.; Carande, R. Space-Based Measurements of Sheet-Flow Characteristics in the Everglades Wetland, Florida. Geophys. Res. Lett. 2004, 31, 15. [Google Scholar] [CrossRef] [Green Version]
- Wdowinski, S.; Kim, S.-W.; Amelung, F.; Dixon, T.H.; Miralles-Wilhelm, F.; Sonenshein, R. Space-Based Detection of Wetlands’ Surface Water Level Changes from L-Band SAR Interferometry. Remote Sens. Environ. 2008, 112, 681–696. [Google Scholar] [CrossRef]
- Lu, Z.; Crane, M.; Kwoun, O.-I.; Wells, C.; Swarzenski, C.; Rykhus, R. C-Band Radar Observes Water Level Change in Swamp Forests. EOS Trans. Am. Geophys. Union 2005, 86, 141. [Google Scholar] [CrossRef]
- Kim, J.-W.; Lu, Z.; Lee, H.; Shum, C.K.; Swarzenski, C.M.; Doyle, T.W.; Baek, S.-H. Integrated Analysis of PALSAR/Radarsat-1 InSAR and ENVISAT Altimeter Data for Mapping of Absolute Water Level Changes in Louisiana Wetlands. Remote Sens. Environ. 2009, 113, 2356–2365. [Google Scholar] [CrossRef]
- Hong, S.-H.; Wdowinski, S.; Kim, S.-W.; Won, J.-S. Multi-Temporal Monitoring of Wetland Water Levels in the Florida Everglades Using Interferometric Synthetic Aperture Radar (InSAR). Remote Sens. Environ. 2010, 114, 2436–2447. [Google Scholar] [CrossRef]
- Oliver-Cabrera, T.; Wdowinski, S. InSAR-Based Mapping of Tidal Inundation Extent and Amplitude in Louisiana Coastal Wetlands. Remote Sens. 2016, 8, 393. [Google Scholar] [CrossRef] [Green Version]
- Liao, H.; Wdowinski, S.; Li, S. Regional-Scale Hydrological Monitoring of Wetlands with Sentinel-1 InSAR Observations: Case Study of the South Florida Everglades. Remote Sens. Environ. 2020, 251, 112051. [Google Scholar] [CrossRef]
- Kasischke, E.S.; Bourgeau-Chavez, L.L. Monitoring South Florida Wetlands Using ERS-1 SAR Imagery. Photogramm. Eng. Remote Sens. 1997, 63, 281–291. [Google Scholar]
- Pope, K.O.; Rejmankova, E.; Paris, J.F.; Woodruff, R. Detecting Seasonal Flooding Cycles in Marshes of the Yucatan Peninsula with SIR-C Polarimetric Radar Imagery. Remote Sens. Environ. 1997, 59, 157–166. [Google Scholar] [CrossRef]
- Watts, D.L.; Cohen, M.J.; Heffernan, J.B.; Osborne, T.Z. Hydrologic Modification and the Loss of Self-Organized Patterning in the Ridge–slough Mosaic of the Everglades. Ecosystems 2010, 13, 813–827. [Google Scholar] [CrossRef]
- Muss, J.D.; Austin, D.F.; Snyder, J.R. Plants of the Big Cypress National Preserve, Florida. J. Torrey Bot. Soc. 2003, 130, 119–142. [Google Scholar] [CrossRef]
- Mitsova, D.; Esnard, A.-M.; Sapat, A.; Lai, B.S. Socioeconomic Vulnerability and Electric Power Restoration Timelines in Florida: The Case of Hurricane Irma. Nat. Hazards 2018, 94, 689–709. [Google Scholar] [CrossRef]
- So, S.; Juarez, B.; Valle-Levinson, A.; Gillin, M.E. Storm Surge from Hurricane Irma along the Florida Peninsula. Estuar. Coast. Shelf Sci. 2019, 229, 106402. [Google Scholar] [CrossRef]
- Pinelli, J.P.; Roueche, D.; Kijewski-Correa, T.; Plaz, F.; Prevatt, D.; Zisis, I.; Elawady, A.; Haan, F.; Pei, S.; Gurley, K.; et al. Overview of Damage Observed in Regional Construction during the Passage of Hurricane Irma over the State of Florida. In Forensic Engineering 2018: Forging Forensic Frontiers; American Society of Civil Engineers: Reston, VA, USA, 2018; pp. 1028–1038. [Google Scholar]
- Lagomasino, D.; Fatoyinbo, T.; Castañeda-Moya, E.; Cook, B.D.; Montesano, P.M.; Neigh, C.S.R.; Corp, L.A.; Ott, L.E.; Chavez, S.; Morton, D.C. Storm Surge and Ponding Explain Mangrove Dieback in Southwest Florida Following Hurricane Irma. Nat. Commun. 2021, 12, 4003. [Google Scholar] [CrossRef]
- Wingard, G.L.; Bergstresser, S.E.; Stackhouse, B.L.; Jones, M.C.; Marot, M.E.; Hoefke, K.; Daniels, A.; Keller, K. Impacts of Hurricane Irma on Florida Bay Islands, Everglades National Park, USA. Estuaries Coasts 2020, 43, 1070–1089. [Google Scholar] [CrossRef] [Green Version]
- Palaseanu, M.; Pearlstine, L. Estimation of Water Surface Elevations for the Everglades, Florida. Comput. Geosci. 2008, 34, 815–826. [Google Scholar] [CrossRef]
- Liu, Z.; Volin, J.C.; Dianne Owen, V.; Pearlstine, L.G.; Allen, J.R.; Mazzotti, F.J.; Higer, A.L. Validation and Ecosystem Applications of the EDEN Water-Surface Model for the Florida Everglades. Ecohydrology 2009, 2, 182–194. [Google Scholar] [CrossRef]
- Haider, S.; McCloskey, B. EDEN: Everglades Depth Estimation Network Water Level And Depth Surfaces; U.S. Geological Survey Software Release: Reston, VA, USA, 2020. [CrossRef]
- Johnston, K.; Ver Hoef, J.M.; Krivoruchko, K.; Lucas, N. Using ArcGIS Geostatistical Analyst; Esri: Redlands, CA, USA, 2004. [Google Scholar]
- Lin, Y.N.; Yun, S.-H.; Bhardwaj, A.; Hill, E.M. Urban Flood Detection with Sentinel-1 Multi-Temporal Synthetic Aperture Radar (SAR) Observations in a Bayesian Framework: A Case Study for Hurricane Matthew. Remote Sens. 2019, 11, 1778. [Google Scholar] [CrossRef]
- Cohen, J. A Coefficient of Agreement for Nominal Scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Sah, J.P.; Heffernan, J.B.; Ross, M.S.; Isherwood, E.; Castrillon, K. Landscape Pattern-Ridge, Slough, and Tree Island Mosaics; Annual Report—Year 4 (2015–2019); US Army Engineer Research and Development Center: Vicksburg, MS, USA, 2020; 56p. [Google Scholar]
- Kalla, P.I.; Scheidt, D.J. Everglades Ecosystem Assessment--Phase IV, 2014: Data Reduction and Initial Synthesis; SESD Project 14–0380; United States Environmental Protection Agency, Science and Ecosystem Support Division: Athens, GA, USA, 2017; 58p.
- Zhang, B.; Wdowinski, S.; Oliver-Cabrera, T.; Koirala, R.; Jo, M.; Osmanoglu, B. Mapping the Extent and Magnitude of Sever Flooding Induced by Hurricane IRMA with Multi-Temporal SENTINEL-1 SAR and Insar Observations. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 2237–2244. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| nSWDI (%) | nNon-SWDI (%) | Overall Accuracy | Kappa Coefficient | Average Uncertain Pixels Percentage |
|---|---|---|---|---|
| 45 | 10 | 0.81 | 0.60 | 0.30 |
| 40 | 10 | 0.81 | 0.60 | 0.27 |
| 35 | 10 | 0.81 | 0.60 | 0.24 |
| 50 | 10 | 0.80 | 0.60 | 0.32 |
| 30 | 10 | 0.81 | 0.59 | 0.21 |
| 25 | 10 | 0.81 | 0.58 | 0.17 |
| 20 | 10 | 0.81 | 0.57 | 0.13 |
| 35 | 15 | 0.78 | 0.55 | 0.17 |
| 40 | 15 | 0.78 | 0.55 | 0.20 |
| 45 | 15 | 0.77 | 0.54 | 0.22 |
| 30 | 15 | 0.78 | 0.54 | 0.14 |
| 50 | 15 | 0.77 | 0.54 | 0.25 |
| Date | True SWDI | False SWDI | False Non- SWDI | True Non- SWDI | Uncertain | OA | Kappa | SWDI | Non-SWDI | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| UA | PA | UA | PA | ||||||||
| 20170910 | 0.67 | 0.05 | 0.26 | 0.02 | 0.12 | 0.69 | 0.03 | 0.94 | 0.72 | 0.08 | 0.50 |
| 20171004 | 0.79 | 0.06 | 0.09 | 0.06 | 0.11 | 0.84 | 0.33 | 0.92 | 0.89 | 0.38 | 0.47 |
| 20171016 | 0.61 | 0.02 | 0.13 | 0.24 | 0.10 | 0.84 | 0.64 | 0.96 | 0.82 | 0.64 | 0.91 |
| 20171028 | 0.61 | 0.07 | 0.09 | 0.23 | 0.13 | 0.84 | 0.63 | 0.90 | 0.87 | 0.72 | 0.77 |
| 20171109 | 0.47 | 0.03 | 0.13 | 0.37 | 0.12 | 0.84 | 0.67 | 0.94 | 0.77 | 0.73 | 0.93 |
| 20171121 | 0.35 | 0.06 | 0.14 | 0.45 | 0.18 | 0.80 | 0.59 | 0.84 | 0.71 | 0.76 | 0.88 |
| September 10 | October 4 | October 16 | October 28 | November 9 | November 21 | |
|---|---|---|---|---|---|---|
| Herbaceous dominant | 0.79 | 0.94 | 0.92 | 0.89 | 0.85 | 0.75 |
| Trees embedded in herbaceous matrix | 0.40 | 0.61 | 0.68 | 0.75 | 0.82 | 0.90 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Wdowinski, S.; Gann, D. Space-Based Detection of Significant Water-Depth Increase Induced by Hurricane Irma in the Everglades Wetlands Using Sentinel-1 SAR Backscatter Observations. Remote Sens. 2022, 14, 1415. https://doi.org/10.3390/rs14061415
Zhang B, Wdowinski S, Gann D. Space-Based Detection of Significant Water-Depth Increase Induced by Hurricane Irma in the Everglades Wetlands Using Sentinel-1 SAR Backscatter Observations. Remote Sensing. 2022; 14(6):1415. https://doi.org/10.3390/rs14061415
Chicago/Turabian StyleZhang, Boya, Shimon Wdowinski, and Daniel Gann. 2022. "Space-Based Detection of Significant Water-Depth Increase Induced by Hurricane Irma in the Everglades Wetlands Using Sentinel-1 SAR Backscatter Observations" Remote Sensing 14, no. 6: 1415. https://doi.org/10.3390/rs14061415
APA StyleZhang, B., Wdowinski, S., & Gann, D. (2022). Space-Based Detection of Significant Water-Depth Increase Induced by Hurricane Irma in the Everglades Wetlands Using Sentinel-1 SAR Backscatter Observations. Remote Sensing, 14(6), 1415. https://doi.org/10.3390/rs14061415