
Rapid Mapping of Landslides on SAR Data by Attention U-Net

 ,
, 
 ,
,  and
and
Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study | Main Objective | Algorithm | Data Used |
|---|---|---|---|
| Chen et al. [20] | Automated landslide detection for mountain cities | D-CNN 1 | Multispectral, slope |
| Ghorbanzadeh et al. [21] | Comparison between ML and DL for landslide mapping | CNN 2, D-CNN 1, SVM 3, RM 4, ANN 5 | Multispectral, plan curvature, slope aspect, slope |
| Catani [22] | Automated landslide classification | CNN 2 | Crowdsourced optical imagery |
| Meena et al. [23] | Automated rainfall-induced landslide mapping | CNN 2 | Multispectral, slope |
| Sameen et al. [24] | Landslide detection by residual networks | ResNet 7, CNN 2 | RGB, elevation, slope, slope aspect, curvature |
| Ghorbanzadeh et al. [25] | Evaluation of the impact of conditioning factors for automated landslide mapping | CNN 2 | Multispectral, elevation, slope, slope aspect, plan curvature |
| Liu et al. [26] | Co-seismic automated landslide mapping | Liu et al. [26] 6 | Co-seismic automated landslide mapping |
| Prakash et al. [27] | Generalized, cross-site landslide automated mapping | Deep supervised CNN 2 | Multispectral, hillshade, slope |
| Nava et al. [39] | Co-seismic automated landslide detection | CNN 2 | SAR amplitude, elevation, slope |
2. Study Area and Materials
2.1. Study Area
2.2. Materials
3. Methodology
3.1. Dataset Preparation
3.1.1. Data Processing
3.1.2. Dataset Creation
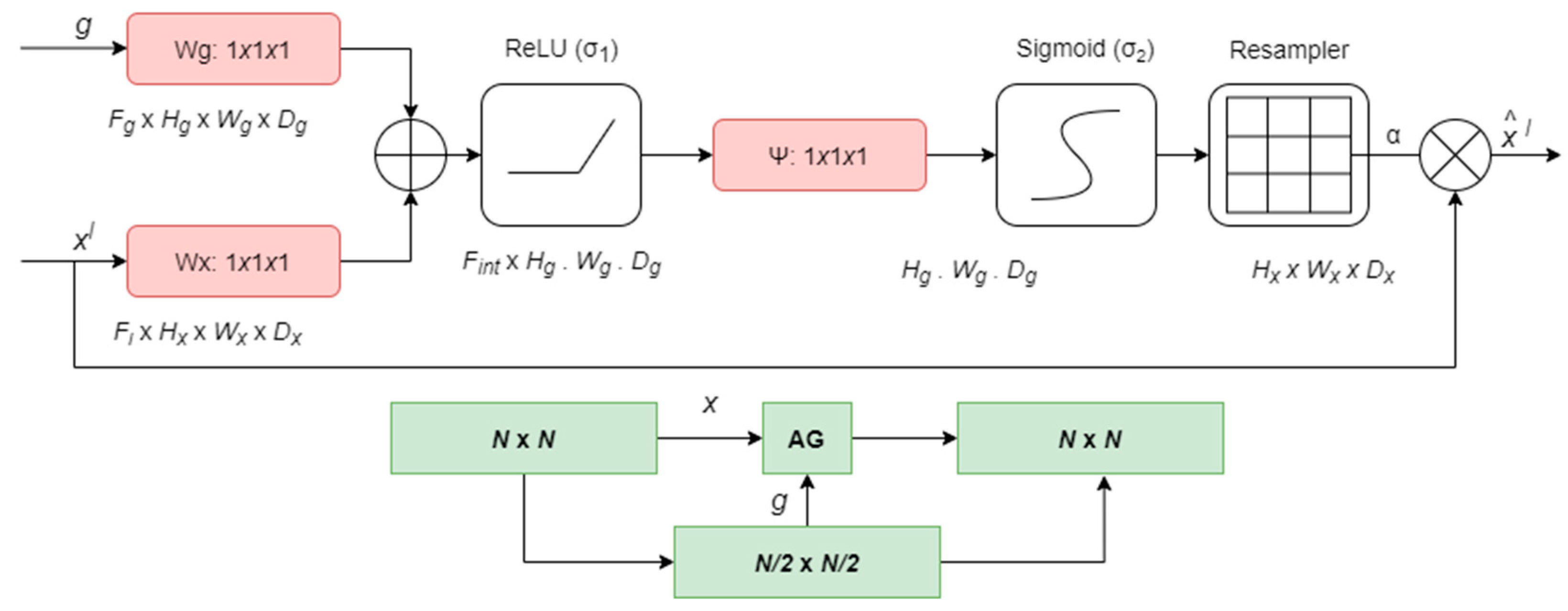
3.2. Attention U-Net
3.3. Supervised Pixel-Based Classification
3.4. Accuracy Assessment
4. Results
Landslide Automated Mapping
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Hong, H.; Chen, W.; Xu, C.; Youssef, A.M.; Pradhan, B.; Tien Bui, D. Rainfall-Induced Landslide Susceptibility Assessment at the Chongren Area (China) Using Frequency Ratio, Certainty Factor, and Index of Entropy. Geocarto Int. 2017, 32, 139–154. [Google Scholar] [CrossRef]
- Serey, A.; Piñero-Feliciangeli, L.; Sepúlveda, S.A.; Poblete, F.; Petley, D.N.; Murphy, W. Landslides Induced by the 2010 Chile Megathrust Earthquake: A Comprehensive Inventory and Correlations with Geological and Seismic Factors. Landslides 2019, 16, 1153–1165. [Google Scholar] [CrossRef]
- Song, K.; Wang, F.; Dai, Z.; Iio, A.; Osaka, O.; Sakata, S. Geological Characteristics of Landslides Triggered by the 2016 Kumamoto Earthquake in Mt. Aso Volcano, Japan. Bull. Eng. Geol. Environ. 2019, 78, 167–176. [Google Scholar] [CrossRef]
- Chunga, K.; Livio, F.A.; Martillo, C.; Lara-Saavedra, H.; Ferrario, M.F.; Zevallos, I.; Michetti, A.M. Landslides Triggered by the 2016 Mw 7.8 Pedernales, Ecuador Earthquake: Correlations with ESI-07 Intensity, Lithology, Slope and PGA-h. Geosciences 2019, 9, 371. [Google Scholar] [CrossRef] [Green Version]
- Ferrario, M.F. Landslides Triggered by Multiple Earthquakes: Insights from the 2018 Lombok (Indonesia) Events. Nat. Hazards 2019, 98, 575–592. [Google Scholar] [CrossRef]
- Wang, F.; Fan, X.; Yunus, A.P.; Subramanian, S.S.; Alonso-Rodriguez, A.; Dai, L.; Xu, Q.; Huang, R. Coseismic Landslides Triggered by the 2018 Hokkaido, Japan (Mw 6.6), Earthquake: Spatial Distribution, Controlling Factors, and Possible Failure Mechanism. Landslides 2019, 16, 1551–1566. [Google Scholar] [CrossRef]
- Aleotti, P.; Chowdhury, R. Landslide Hazard Assessment: Summary Review and New Perspectives. Bull. Eng. Geol. Environ. 1999, 58, 21–44. [Google Scholar] [CrossRef]
- Quesada-Román, A.; Fallas-López, B.; Hernández-Espinoza, K.; Stoffel, M.; Ballesteros-Cánovas, J.A. Relationships between Earthquakes, Hurricanes, and Landslides in Costa Rica. Landslides 2019, 16, 1539–1550. [Google Scholar] [CrossRef]
- Galli, M.; Ardizzone, F.; Cardinali, M.; Guzzetti, F.; Reichenbach, P. Comparing Landslide Inventory Maps. Geomorphology 2008, 94, 268–289. [Google Scholar] [CrossRef]
- Wieczorek, G.F. Preparing a Detailed Landslide-Inventory Map for Hazard Evaluation and Reduction. Bull. Assoc. Eng. Geol. 1984, 21, 337–342. [Google Scholar] [CrossRef]
- Reichenbach, P.; Rossi, M.; Malamud, B.D.; Mihir, M.; Guzzetti, F. A Review of Statistically-Based Landslide Susceptibility Models. Earth Sci. Rev. 2018, 180, 60–91. [Google Scholar] [CrossRef]
- Catani, F.; Lagomarsino, D.; Segoni, S.; Tofani, V. Landslide Susceptibility Estimation by Random Forests Technique: Sensitivity and Scaling Issues. Nat. Hazards Earth Syst. Sci. 2013, 13, 2815–2831. [Google Scholar] [CrossRef] [Green Version]
- Catani, F.; Tofani, V.; Lagomarsino, D. Spatial Patterns of Landslide Dimension: A Tool for Magnitude Mapping. Geomorphology 2016, 273, 361–373. [Google Scholar] [CrossRef] [Green Version]
- Manconi, A.; Casu, F.; Ardizzone, F.; Bonano, M.; Cardinali, M.; de Luca, C.; Gueguen, E.; Marchesini, I.; Parise, M.; Vennari, C.; et al. Brief Communication: Rapid Mapping of Landslide Events: The 3 December 2013 Montescaglioso Landslide, Italy. Nat. Hazards Earth Syst. Sci. 2014, 14, 1835–1841. [Google Scholar] [CrossRef] [Green Version]
- Meena; Tavakkoli Piralilou Comparison of Earthquake-Triggered Landslide Inventories: A Case Study of the 2015 Gorkha Earthquake, Nepal. Geosciences 2019, 9, 437. [CrossRef] [Green Version]
- Mezaal, M.; Pradhan, B.; Rizeei, H. Improving Landslide Detection from Airborne Laser Scanning Data Using Optimized Dempster–Shafer. Remote Sens. 2018, 10, 1029. [Google Scholar] [CrossRef] [Green Version]
- Blaschke, T. Object Based Image Analysis for Remote Sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef] [Green Version]
- Duro, D.C.; Franklin, S.E.; Dubé, M.G. A Comparison of Pixel-Based and Object-Based Image Analysis with Selected Machine Learning Algorithms for the Classification of Agricultural Landscapes Using SPOT-5 HRG Imagery. Remote Sens. Environ. 2012, 118, 259–272. [Google Scholar] [CrossRef]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.-S.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep Learning in Remote Sensing: A Comprehensive Review and List of Resources. IEEE Geosci. Remote Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Zhang, Y.; Ouyang, C.; Zhang, F.; Ma, J. Automated Landslides Detection for Mountain Cities Using Multi-Temporal Remote Sensing Imagery. Sensors 2018, 18, 821. [Google Scholar] [CrossRef] [Green Version]
- Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.R.; Tiede, D.; Aryal, J. Evaluation of Different Machine Learning Methods and Deep-Learning Convolutional Neural Networks for Landslide Detection. Remote Sens. 2019, 11, 196. [Google Scholar] [CrossRef] [Green Version]
- Catani, F. Landslide Detection by Deep Learning of Non-Nadiral and Crowdsourced Optical Images. Landslides 2021, 18, 1025–1044. [Google Scholar] [CrossRef]
- Meena, S.R.; Ghorbanzadeh, O.; van Westen, C.J.; Nachappa, T.G.; Blaschke, T.; Singh, R.P.; Sarkar, R. Rapid Mapping of Landslides in the Western Ghats (India) Triggered by 2018 Extreme Monsoon Rainfall Using a Deep Learning Approach. Landslides 2021, 18, 1937–1950. [Google Scholar] [CrossRef]
- Sameen, M.I.; Pradhan, B. Landslide Detection Using Residual Networks and the Fusion of Spectral and Topographic Information. IEEE Access 2019, 7, 114363–114373. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Meena, S.R.; Shahabi Sorman Abadi, H.; Tavakkoli Piralilou, S.; Zhiyong, L.; Blaschke, T. Landslide Mapping Using Two Main Deep-Learning Convolution Neural Network Streams Combined by the Dempster–Shafer Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 452–463. [Google Scholar] [CrossRef]
- Liu, P.; Wei, Y.; Wang, Q.; Chen, Y.; Xie, J. Research on Post-Earthquake Landslide Extraction Algorithm Based on Improved U-Net Model. Remote Sens. 2020, 12, 894. [Google Scholar] [CrossRef] [Green Version]
- Prakash, N.; Manconi, A.; Loew, S. A New Strategy to Map Landslides with a Generalized Convolutional Neural Network. Sci. Rep. 2021, 11, 9722. [Google Scholar] [CrossRef]
- Voigt, S.; Kemper, T.; Riedlinger, T.; Kiefl, R.; Scholte, K.; Mehl, H. Satellite Image Analysis for Disaster and Crisis-Management Support. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1520–1528. [Google Scholar] [CrossRef]
- Wilson, A.M.; Jetz, W. Remotely Sensed High-Resolution Global Cloud Dynamics for Predicting Ecosystem and Biodiversity Distributions. PLoS Biol. 2016, 14, e1002415. [Google Scholar] [CrossRef]
- Williams, J.G.; Rosser, N.J.; Kincey, M.E.; Benjamin, J.; Oven, K.J.; Densmore, A.L.; Milledge, D.G.; Robinson, T.R.; Jordan, C.A.; Dijkstra, T.A. Satellite-Based Emergency Mapping Using Optical Imagery: Experience and Reflections from the 2015 Nepal Earthquakes. Nat. Hazards Earth Syst. Sci. 2018, 18, 185–205. [Google Scholar] [CrossRef] [Green Version]
- Raspini, F.; Ciampalini, A.; del Conte, S.; Lombardi, L.; Nocentini, M.; Gigli, G.; Ferretti, A.; Casagli, N. Exploitation of Amplitude and Phase of Satellite SAR Images for Landslide Mapping: The Case of Montescaglioso (South Italy). Remote Sens. 2015, 7, 14576–14596. [Google Scholar] [CrossRef] [Green Version]
- Tessari, G.; Floris, M.; Pasquali, P. Phase and Amplitude Analyses of SAR Data for Landslide Detection and Monitoring in Non-Urban Areas Located in the North-Eastern Italian Pre-Alps. Environ. Earth Sci. 2017, 76, 85. [Google Scholar] [CrossRef]
- Ge, P.; Gokon, H.; Meguro, K.; Koshimura, S. Study on the Intensity and Coherence Information of High-Resolution ALOS-2 SAR Images for Rapid Massive Landslide Mapping at a Pixel Level. Remote Sens. 2019, 11, 2808. [Google Scholar] [CrossRef] [Green Version]
- Plank, S.; Twele, A.; Martinis, S. Landslide Mapping in Vegetated Areas Using Change Detection Based on Optical and Polarimetric SAR Data. Remote Sens. 2016, 8, 307. [Google Scholar] [CrossRef] [Green Version]
- Mondini, A.C.; Santangelo, M.; Rocchetti, M.; Rossetto, E.; Manconi, A.; Monserrat, O. Sentinel-1 SAR Amplitude Imagery for Rapid Landslide Detection. Remote Sens. 2019, 11, 760. [Google Scholar] [CrossRef] [Green Version]
- Mondini, A. Measures of Spatial Autocorrelation Changes in Multitemporal SAR Images for Event Landslides Detection. Remote Sens. 2017, 9, 554. [Google Scholar] [CrossRef] [Green Version]
- Mondini, A.C.; Guzzetti, F.; Chang, K.T.; Monserrat, O.; Martha, T.R.; Manconi, A. Landslide Failures Detection and Mapping Using Synthetic Aperture Radar: Past, Present and Future. Earth-Sci. Rev. 2021, 216, 103574. [Google Scholar] [CrossRef]
- Abraham, N.; Khan, N.M. A Novel Focal Tversky Loss Function With Improved Attention U-Net for Lesion Segmentation. In Proceedings of the 2019 IEEE 16th International Symposium on Biomedical Imaging (ISBI 2019), Venice, Italy, 8–11 April 2019; pp. 683–687. [Google Scholar]
- Nava, L.; Monserrat, O.; Catani, F. Improving Landslide Detection on SAR Data through Deep Learning. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Matsuno, K.; Ishida, M. Geological Map of Hayakita in Scale of 50,000; Geological Survey of Japan: Tokio, Japan, 1960.
- Osanai, N.; Yamada, T.; Hayashi, S.I.; Kastura, S.; Furuichi, T.; Yanai, S.; Murakami, Y.; Miyazaki, T.; Tanioka, Y.; Takiguchi, S.; et al. Characteristics of Landslides Caused by the 2018 Hokkaido Eastern Iburi Earthquake. Landslides 2019, 16, 1517–1528. [Google Scholar] [CrossRef]
- Zhao, B.; Wang, Y.; Feng, Q.; Guo, F.; Zhao, X.; Ji, F.; Liu, J.; Ming, W. Preliminary Analysis of Some Characteristics of Coseismic Landslides Induced by the Hokkaido Iburi-Tobu Earthquake (5 September 2018), Japan. CATENA 2020, 189, 104502. [Google Scholar] [CrossRef]
- Geospatial Information Authority of Japan. The 2018 Hokkaido Eastern Iburi Earthquake: Fault Model (Preliminary). Available online: https://www.gsi.go.jp/cais/topic180912-index-e.html (accessed on 17 February 2021).
- Yamagishi, H.; Yamazaki, F. Landslides by the 2018 Hokkaido Iburi-Tobu Earthquake on September 6. Landslides 2018, 15, 2521–2524. [Google Scholar] [CrossRef] [Green Version]
- ESA Copernicus Open Access Hub. Available online: https://scihub.copernicus.eu/dhus/#/home (accessed on 14 October 2020).
- ESA Level-1 GRD Products. Available online: https://sentinel.esa.int/web/sentinel/technical-guides/sentinel-1-sar/products-algorithms/level-1-algorithms/ground-range-detected (accessed on 12 February 2021).
- USGS Earth Explorer. Available online: https://earthexplorer.usgs.gov/ (accessed on 18 February 2021).
- Marcelino, P. Transfer Learning from Pre-Trained Models. Towards Data Sci. 2018, 10, 23. [Google Scholar]
- Pan, Z.; Xu, J.; Guo, Y.; Hu, Y.; Wang, G. Deep Learning Segmentation and Classification for Urban Village Using a Worldview Satellite Image Based on U-Net. Remote Sens. 2020, 12, 1574. [Google Scholar] [CrossRef]
- Marcham, F. TensorFlow: Large-Scale Machine Learning on Heterogeneous Distributed Systems (Preliminary White Paper, November 9, 2015). arXiv 2016, arXiv:1603.04467. [Google Scholar]
- Milletari, F.; Navab, N.; Ahmadi, S.-A. V-Net: Fully Convolutional Neural Networks for Volumetric Medical Image Segmentation. In Proceedings of the 2016 Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016. [Google Scholar]
- Kingma, D.P.; Ba, J.L. Adam: A Method for Stochastic Optimization. In Proceedings of the 3rd International Conference on Learning Representations (ICLR 2015—Conference Track Proceedings), San Diego, CA, USA, 5–8 May 2015. [Google Scholar]
- Lormand, C.; Zellmer, G.F.; Németh, K.; Kilgour, G.; Mead, S.; Palmer, A.S.; Sakamoto, N.; Yurimoto, H.; Moebis, A. Weka Trainable Segmentation Plugin in ImageJ: A Semi-Automatic Tool Applied to Crystal Size Distributions of Microlites in Volcanic Rocks. Microsc. Microanal. 2018, 24, 667–675. [Google Scholar] [CrossRef] [PubMed]
- Ntoutsi, E.; Fafalios, P.; Gadiraju, U.; Iosifidis, V.; Nejdl, W.; Vidal, M.; Ruggieri, S.; Turini, F.; Papadopoulos, S.; Krasanakis, E.; et al. Bias in Data-driven Artificial Intelligence Systems—An Introductory Survey. WIREs Data Min. Knowl. Discov. 2020, 10, e1356. [Google Scholar] [CrossRef] [Green Version]
- Aimaiti, Y.; Liu, W.; Yamazaki, F.; Maruyama, Y. Earthquake-Induced Landslide Mapping for the 2018 Hokkaido Eastern Iburi Earthquake Using PALSAR-2 Data. Remote Sens. 2019, 11, 2351. [Google Scholar] [CrossRef] [Green Version]




| Orbit | Date | Details |
|---|---|---|
| Descending | 1 September 2018 | Pre-event |
| 13 September 2018 | Post-event | |
| 25 September 2018 | Post-event | |
| Ascending | 05 September 2018 | Pre-event |
| 17 September 2018 | Post-event | |
| 29 September 2018 | Post-event |
| Name | Orbit | Band1 | Band2 | Band3 | Band4 |
|---|---|---|---|---|---|
| D_BA_S | Descending | VV pre-event | VV post-event | Slope | |
| A_BA_S | Ascending | VV pre-event | VV post-event | Slope | |
| D_BAA_S | Descending | VV pre-event | VV post-event | VV post-event | Slope |
| A_BAA_S | Ascending | VV pre-event | VV post-event | VV post-event | Slope |
| Name | Augmentations | Batch Size | Learning Rate | Filters First Layer | Precision (%) | Recall (%) | F1-Score (%) | IoU (%) |
|---|---|---|---|---|---|---|---|---|
| D_BA_S 1 | Horizontal and Vertical flip | 4 | 0.001 | 32 | 42.79 | 60.96 | 50.17 | 33.52 |
| None | 4 | 0.001 | 32 | 44.66 | 66.53 | 53.37 | 36.43 | |
| A_BA_S 2 | Horizontal and Vertical flip | 16 | 0.001 | 32 | 55.21 | 66.26 | 60.02 | 42.93 |
| None | 4 | 0.001 | 32 | 57.16 | 62.86 | 59.68 | 42.58 |
| Name | Augmentations | Batch Size | Learning Rate | Filters First Layer | Precision (%) | Recall (%) | F1-Score (%) | IoU (%) |
|---|---|---|---|---|---|---|---|---|
| D_BAA_S 1 | Horizontal and Vertical flip | 16 | 0.001 | 32 | 49.63 | 59.09 | 53.77 | 36.95 |
| None | 8 | 0.001 | 32 | 48.43 | 64.23 | 55.15 | 38.13 | |
| A_BAA_S 2 | Horizontal and Vertical flip | 8 | 0.001 | 32 | 53.59 | 71.60 | 61.15 | 44.13 |
| None | 8 | 0.001 | 32 | 53.07 | 66.33 | 58.91 | 42.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nava, L.; Bhuyan, K.; Meena, S.R.; Monserrat, O.; Catani, F. Rapid Mapping of Landslides on SAR Data by Attention U-Net. Remote Sens. 2022, 14, 1449. https://doi.org/10.3390/rs14061449
Nava L, Bhuyan K, Meena SR, Monserrat O, Catani F. Rapid Mapping of Landslides on SAR Data by Attention U-Net. Remote Sensing. 2022; 14(6):1449. https://doi.org/10.3390/rs14061449
Chicago/Turabian StyleNava, Lorenzo, Kushanav Bhuyan, Sansar Raj Meena, Oriol Monserrat, and Filippo Catani. 2022. "Rapid Mapping of Landslides on SAR Data by Attention U-Net" Remote Sensing 14, no. 6: 1449. https://doi.org/10.3390/rs14061449